對稱遲后-超前校正的一體化設計方法
2021-10-23 02:30:02吳愛國董瑞琦
電氣電子教學學報 2021年5期
張 穎,吳愛國,董瑞琦,黃 芩
(哈爾濱工業大學(深圳),深圳518055)
0 引言
在單輸入單輸出系統的頻率設計方法中,遲后-超前校正設計是最復雜的。在頻率設計方法中,單位增益遲后校正環節主要作用于未校正系統的低頻段,利用遲后環節的高頻衰減功能降低系統剪切頻率,進而通過自身的相位儲備提高系統的相角裕度;而帶有增益的遲后環節則可增大系統的開環增益;超前環節主要作用于未校正系統的中頻段,通過校正環節在其高頻段的正相角提高系統的相角裕度[1]。由于遲后環節和超前環節作用的頻段不同,設計參數之間的影響很小,在校正設計時可以對它們分開設計。基于這樣一種思想,很多教材在通過遲后-超前環節對系統校正時,都是將遲后環節和超前環節分開設計的。比較有代表性的是文獻[2]和文獻[3]。在文獻[2]中,先采用遲后校正使系統的剪切頻率略小于設計要求,再對遲后校正后的系統進行超前校正設計。在文獻[3]中,先設計超前環節滿足系統的穩定性能,再設計遲后環節滿足系統的穩態精度。文獻[3]在進行超前環節設計時,需要將未校正系統的開環增益降低以滿足剪切頻率的要求。開環增益如何降低需要試探,如果選擇的開環增益不合適,就不能設計出滿足穩態要求的超前環節。在采用這種遲后-設計方法時,經常需要對這個開環增益進行糾正。文獻[4]和[5]所給出的遲后-超前校正設計方法,也是先設計超前-環節再設計遲后環節,但設計思想與文獻[3]不同。在文獻[4]和[5]的超前環節設計步驟中,超前環節用于提高目標剪切頻率處的相角,并沒有使用剪切頻率的概念。
可以看到,在前面的設計方法中,沒有把超前環節和遲后環節作為一個整體。設計的主要思路是利用這兩個環節的不同作用頻段分開設計兩個部分,設計過程所付出的工作量相當于一個遲后校正和一個超前校正的整體工作量。而且在設計過程中也存在一些人為選擇的中間變量,如文獻[2]中遲后校正后系統的剪切頻率的選擇,文獻[3]中進行超前校正時的開環增益的選擇。這兩個量的選擇并沒有明確的標準,主要是靠設計者的經驗進行大致的估計,并根據校正后系統的性能進行調整。一般來說,很難一次設計成功。本論文將把遲后環節和超前環節作為一個整體進行考慮,先給出對稱遲后-超前校正環節的頻率特性,再根據頻率特性給出遲后-超前校正的一體化設計方法。
1 對稱遲后-超前校正環節的頻率特性
本節討論如下遲后-超前環節的頻率特性

在使用時,其低頻特性和高頻特性完全分開,因此有αT<t。在此條件下,遲后-超前環節(1)的漸近對數幅頻特性?為:

由此容易得到遲后-超前環節(1)的漸近頻率特性如圖1所示。可以看到,遲后-超前校正環節(1)的漸近幅頻特性曲線關于對稱。進一步,若ω1和ω2是關于對稱的兩個頻率點,即。對這兩個頻率有

于是有201g|Gc(jω2)|=201g|Gc(jω1)|。這說明遲后-超前校正環節(1)的精確對數幅頻特性曲線201g|Gc(jω)|也是關于對稱的。遲后-超前校正環節的相頻特性為

在低頻段,主要是遲后環節起作用,相角為負值;在高頻段,主要是超前環節起作用,相角為正值。由于相頻特性的連續性,一定會存在某頻率點遲后-超前校正環節(1)的相角為零。相頻特性(4)的半對數曲線如圖1所示。式(4)可等價地寫為



這說明遲后超前校正環節(1)的半對數相頻特性曲線是關于點中心對稱的。關于遲后-超前校正環節(1)頻率特性曲線的對稱性我們有如下命題。
命題1 對于遲后-超前校正環節(1),如果頻率用對數表示,則幅頻特性曲線關于直線軸對稱,相頻特性曲線關于中心對稱的。
正是引用命題1中的結論,為方便起見,我們稱遲后-超前校正環節(1)稱為對稱遲后-超前校正環節的原因。對于τ>αT的遲后-超前校正環節(1),其對數幅頻特性在整個頻段是負值;其相頻特性在低頻段表現為遲后特性,具有負相位,在高頻段表現為超前特性,具有正相位。在進行設計時,遲后-超前環節(1)的低頻段和高頻段離得足夠遠,在分析遲后-超前環節(1)的最大正相角時,可以認為遲后環節所產生的相角是常值-Δd,此時遲后-超前環節(1)在其高頻段的相頻特性可近似表示為附近,遲后-超前環節(1)最大相角為:

考慮到超前環節中的結論,在頻率

命題2 對于α>1的遲后-超前校正環節(1),定義

則有

進一步,如果時間常數τ滿足

則遲后-超前環節(1)的最大相角φm可在ω=ωm附近取得,且有

而Δd的取值在6°~12°之間。
2 對稱遲后-超前校正一體化設計原理
第1節給出了對稱遲后-超前校正環節作為一個整體的頻率性質,在遲后環節與超前環節所在頻段離得足夠遠的情形下,給出其最大相角和取得最大相角的頻率點。由命題2可知道,對稱遲后-超前環節在其高頻段與超前環節一樣,都能提供正相角。但對稱遲后-超前環節的幅頻特性與超前環節不一樣,其幅值在整個頻段都是衰減的。在給出具體設計步驟之前,需要提及遲后-超前校正主要用于這樣一種情形:所要求的剪切頻率小于未校正系統的剪切頻率,并且在所要求的剪切頻率處未校正系統自身的相位儲備達不到所要求的相位裕度。在進行遲后-超前校正設計時,既要利用超前校正環節的相位超前功能,也要利用未校正系統本身的相位儲備。
我們結合圖2給出相位裕度優先的遲后-超前校正一體化設計方法的原理。細實線是未校正系統G0(s)的頻率特性曲線,所要求的剪切頻率ωc小于未校正系統的剪切頻率,所要求的剪切頻率ωc附近未校正系統的相位儲備又不夠。擬采用對稱遲后-超前環節(1)對系統G0(s)進行校正。為達到相位裕度為γ的要求,期望由未校正系統自身的相位儲備γ0c和校正環節的相角φp共同提供,于是有如下關系
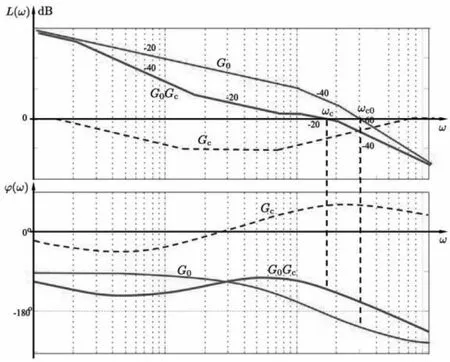
圖2 對稱遲后-超前校正設計原理圖

對于最小相位系統,γ0c滿足γ0c<180°+∠G0(jωcL),其中ωcL為所要求頻率的下界。由于校正環節最優頻率與校正后系統剪切頻率不一致會帶來相角損失,需要對所要求的相位裕度附加一定的裕量Δ0,于是有

將式(8)代入上式可得

令:

則有

事實上,φm即為遲后-超前校正環節(1)超前部分提供的相角。為了讓遲后-超前校正環節(1)能提供最大的相角,其近似最優頻率ωm應該與要求的校正后系統的剪切頻率ωc一致。在此頻率處,未校正系統的幅值是201g|G0(jωc)|,該幅值需要由遲后-超前校正環節(1)的負幅值補償,使得校正后系統的對數幅頻特性201g|G0(jω)Gc(jω)|在ω=ωc處穿過0 dB線。在圖2中,即為表示校正后系統幅頻特性曲線的粗實線在ω=ωc處與0 dB線相交。由命題2知,在該頻率處,遲后-超前校正環節(1)的幅值是-101gα,于是有201g|G0(jωc)|=101gα。由此即可確定校正后系統的剪切頻率。
根據前面的論述可以給出相位裕度優先的遲后-超前校正設計方法設計校正環節(1)的步驟。
設計方法1:相位裕度優先遲后-超前校正設計
第1步.根據所要求的穩態性能指標確定系統的開環增益。
第2步.利用已知的開環增益,繪制未校正系統G0(s)的Bode圖,并計算未校正系統的剪切頻率ωc0,相角裕度γ0和幅值裕度Lg0。
第3步.根據相角裕度的要求確定超前-遲后校正環節的α。為使相角裕度達到要求值,計算超前環節所需提供的超前相角φm,即

式中γ為要求的相角裕度;γ0c是期望未校正系統提供的相位儲備,其滿足γ0c<180°+∠G0(jωcL),其中ωcL為所要求頻率的下界;Δ為附加角。遲后-超前校正環節的參數α由下式確定

第4步.確定校正后系統的剪切頻率ωc。在校正后的剪切頻率處,未校正系統的正幅值由遲后-超前校正環節拉回到0dB線,因此校正后系統的剪切頻率ωc由下式確定

如果求得的剪切頻率滿足要求,則進行下一步;否則返回第3步調整Δ和γL。
第5步.確定超前校正環節。讓超前校正環節取得最大值的頻率對準校正后系統的剪切頻率,即ωm=ωc。根據確定校正裝置的轉時間常數,進而確定超前環節的傳遞函數。
第6步.確定遲后校正環節。為了減小串聯遲后校正對系統相位裕度的影響,要求校正環節在剪切頻率ωc處的遲后相移在6°~12°以下,應進而確定超前環節的傳遞函數。
第7步.檢驗系統的性能指標,若不滿足要求,可增大Δ的值,從第3步起重新計算。
說明1:在上面的設計方法中,附加相角Δ是考慮到遲后環節的相位延遲Δd和校正裝置的近似最優頻率與剪切頻率ωc不一致而產生的附件相角Δ0兩方面的因素。如果遲后環節的轉折頻率之間,相位延遲Δd在6°~12°。另外,由于校正后的剪切頻率ωc比未校正系統的剪切頻率ωc0小。一般來說,未校正系統在剪切頻率ωc附近不會產生大的相位衰減,附加相角Δ0不用太大,甚至是0都可以。綜合兩方面的因素,附加相角Δ一般取10°~15°即可。如果選擇,可選取Δ=10°。
3 算例
以下通過一個例子說明說明該設計方法。
例1 某控制系統的開環傳遞函數為

要求滿足下列性能指標:
(1)單位斜坡輸入r(t)=t時的穩態誤差ess≤
(2)相角裕度γ≥35°;
(3)剪切頻率ωc≥20 rad/s。
試用頻率法設計對稱遲后-超前校正裝置的傳遞函數G0(s)。

第2步.在K=126的情形下,未校正系統的漸近對數幅頻特性為

令201g|G0(jωc)|=0可以確定未校正系統的剪切頻率

相角裕度為

未校正系統是最小相位的,而且相角裕度小于零,因此是不穩定的。
第3步.根據設計要求,校正后系統的剪切頻率的下界是ωcL=20rad/s,在此頻率處相位儲備為180°+∠G0(jωcL)=8.2°。取期望未校正系統提供的相位儲備γ0c=7°。另外,取裕量Δ=10°。為使校正后系統的相角裕度達到要求,超前環節應提供的超前相角為
φm=γ+Δ-γ0c=35°+10°-7°=38°
因此遲后-超前校正環節的參數α為

第4步.按下式確定校正后系統的剪切頻率ωc
101gα=201g|G0(jωc)|
采用漸近幅頻特性簡單求解得ωc=24.80rad/s。滿足設計要求ωc≥20rad/s。
第5步.取ωm=ωc進行設計,超前校正環節的轉折頻率為

滿足設計要求。對校正前后的系統特性進行仿真驗證,所得到的Bode圖如圖3所示,由圖3可知加入所設計的遲后-超前校正裝置后能使原系統的剪切頻率減小,相位裕度增加,達到了設計要求。

圖3 相位裕度優先對稱遲后-超前校正前后系統Bode圖
設計方法1是優先考慮校正后系統相角裕度的要求。類似于超前校正的設計方法,也可以先考慮校正后系統剪切頻率的要求。這就是以下設計方法。
設計方法2:剪切頻率優先遲后-超前校正設計
第1步.根據所要求的穩態性能指標確定系統的開環增益。
第2步.利用已知的開環增益,繪制未校正系統G0(s)的Bode圖,并計算未校正系統的剪切頻率ω0c,相角裕度γ0和幅值裕度Lg0。
第3步.根據設計要求確定校正后系統的ωc,并讓超前校正環節取最大相角的頻率對準該剪切頻率,即ωm=ωc。
第4步.根據幅值補償確定遲后-超前環節的參數α。在校正后系統的剪切頻率處,未校正系統的正幅值由遲后-超前校正環節拉回到0 dB線,因此校正后系統的剪切頻率ωc由下式確定

為滿足相角裕度的要求,需要驗證確定在此α值下,超前環節是否能提供足夠的相角。按下式計算φm

如果

式中γ為要求的相角裕度;γL是期望未校正系統提供的相位儲備,其滿足γL<180°+∠G0(jωcL),其中ωcL為所要求頻率的下界。Δ是附加相角,一般取Δ=10°~25°。
第5步.確定超前校正環節。由第3步和第4步確定的ωm和α,根據確定校正裝置的時間常數,進而確定超前環節的傳遞函數。
第6步.確定遲后校正環節。為了減小串聯遲后校正對系統相位裕度的影響,要求校正環節在剪切頻率ωc處的遲后相移在6°~12°以下,應選擇
進而確定遲后-超前校正裝置的傳遞函數。
第7步.檢驗系統的性能指標,若不滿足要求,可增大Δ的值,從第3步起重新計算。
以下對例1中的系統,按照剪切頻率優先的方法再次設計遲后-超前校正裝置的傳遞函數。
例2:再次考慮例1中的系統和設計指標要求,設計對稱遲后-超前校正裝置。
第1步和第2步同上述的設計方法1、2.
第3步.根據設計要求取校正后系統的剪切頻率ωc=23rad/s。
第4步.由式(18)計算α,得α=5.67
第5步.超前校正裝置的轉折頻率為

則超前校正裝置為:

即

簡單求解該方程可得ωc=22.11rad/s。校正后系統的相位裕度為

滿足設計要求。對校正前后的系統特性進行仿真驗證,所得到的Bode圖如圖4所示,由圖4可知加入所設計的遲后-超前校正裝置后能使原系統的剪切頻率減小,相位裕度增加,達到了設計要求。

圖4 剪切頻率優先對稱遲后-超前校正前后系統Bode圖
該例設計的校正環節與未校正系統產生了零極點對消。
4 結語
本文分析了一類具有對稱特性的遲后-超前校正環節的頻率特性,并由此提出了兩種一體化遲后-超前校正環節設計方法。在校正環節的參數滿足一定條件下,所提出的對稱遲后-超前校正環節能在超前環節作用的頻段內提供正的相角和負的幅值。算例驗證了所提出的遲后-超前一體化設計方法的有效性。豐富了單輸入單輸出系統的頻率設計方法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
