航海模擬器中的港口精準(zhǔn)流場(chǎng)的數(shù)值模擬
2021-10-25 08:50:40蘇鵬華尹勇蔡松
船海工程 2021年5期
蘇鵬華,尹勇,蔡松
(大連海事大學(xué) 航海學(xué)院,遼寧 大連 116026)
大型船舶進(jìn)出港受航行外環(huán)境限制采取低速航行時(shí),易受流的影響發(fā)生碰撞或駛出航道邊界線(xiàn)[1],操縱人員需熟悉航道流場(chǎng)環(huán)境。目前操縱訓(xùn)練較多在船舶操縱模擬器中進(jìn)行[2],模擬器中港灣的流場(chǎng)較多采用定向定速的實(shí)測(cè)值,不能體現(xiàn)港灣水流的不定常性和不均勻性。
國(guó)內(nèi)外應(yīng)用較為廣泛的海洋數(shù)值計(jì)算模型為POM模型[3]和FVCOM模型[4],其中FVCOM模型更適用于淺海、河口和港灣的流場(chǎng)的計(jì)算[5]。二維流場(chǎng)能夠滿(mǎn)足傳統(tǒng)航海模擬器對(duì)視景仿真[6]的需求,也可用于均勻流體對(duì)船體作用計(jì)算。模擬器中船舶數(shù)學(xué)模型需解析船舶在非均勻流場(chǎng)中的受力,二維流場(chǎng)在垂直方向上不能滿(mǎn)足計(jì)算要求。為此,考慮選擇更適合港口環(huán)境的FVCOM模式,水平方向上加密局部重要區(qū)域,在垂向上采用σ坐標(biāo)變換進(jìn)行分層,計(jì)算湛江灣的精準(zhǔn)三維動(dòng)態(tài)流場(chǎng)。將計(jì)算結(jié)果應(yīng)用于Dragon V5000型航海模擬器,使模擬器中湛江灣流場(chǎng)更為真實(shí)。
1 模型構(gòu)建
1.1 模型方程
FVCOM[5]模型具有邊界容易擬合、可進(jìn)行局部加密、離散計(jì)算方程組的特點(diǎn)。港口區(qū)域地形、流場(chǎng)相對(duì)復(fù)雜,使用此模型可較好地進(jìn)行計(jì)算區(qū)域和邊界條件的擬合,也可針對(duì)復(fù)雜區(qū)域進(jìn)行局部加密。
為了擬合不規(guī)則變化的地形情況,在垂向上采用σ坐標(biāo)變換。
(1)
式中:σ的值為-1~0,-1表示海底,0表示海面;D=H+ζ為瞬時(shí)總水深。
1.2 模型參數(shù)
模型的計(jì)算區(qū)域?yàn)檎拷瓰?110°20′21.251 43″E,21°2′23.287 92″N,110°34′0.694 18″E,21°11′17.223 46″N),模型所用地形與水深數(shù)據(jù)來(lái)自電子海圖圖幅CN488102.000、CN512314.000,數(shù)據(jù)的可信度較高。數(shù)學(xué)模型采用無(wú)結(jié)構(gòu)三角形網(wǎng)格對(duì)水平空間進(jìn)行離散,并對(duì)港區(qū)、航道、碼頭以及水深變化劇烈的區(qū)域進(jìn)行局部加密。計(jì)算區(qū)域內(nèi)最小網(wǎng)格步長(zhǎng)50 m,最大網(wǎng)格步長(zhǎng)679 m。開(kāi)邊界為遠(yuǎn)離湛江灣入口的一條弧線(xiàn),可以減小對(duì)于湛江灣內(nèi)關(guān)心區(qū)域的強(qiáng)烈影響。模型在垂向采用σ坐標(biāo),均勻分10層。數(shù)值計(jì)算網(wǎng)格見(jiàn)圖1。
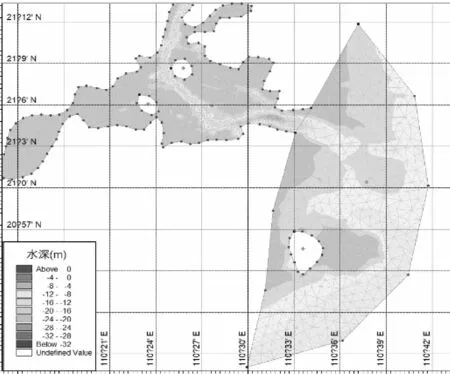
圖1 計(jì)算區(qū)域以及生成的網(wǎng)格
經(jīng)過(guò)多次數(shù)值實(shí)驗(yàn),得到適合本模型的底摩擦系數(shù),取值為0.002 5。為了更好模擬湛江灣水域的水動(dòng)力特征,采用大小模型嵌套的方式,大模型為中國(guó)東海大區(qū)潮模型,小模型為FVCOM模型。FVCOM模型開(kāi)邊界條件由中國(guó)東海大區(qū)潮模型嵌套提供,中國(guó)海大區(qū)模式計(jì)算的逐時(shí)水位驅(qū)動(dòng)小區(qū)模型。
為減少計(jì)算模擬的時(shí)間,采用內(nèi)外模態(tài)交替的計(jì)算方法。模型時(shí)間步長(zhǎng)設(shè)定為:外模時(shí)間步長(zhǎng)10 s,內(nèi)模時(shí)間步長(zhǎng)2 s,滿(mǎn)足模型收斂條件。時(shí)間步長(zhǎng)設(shè)定滿(mǎn)足CFL條件。
(2)
式中:ΔtE為時(shí)間步長(zhǎng);ΔL為網(wǎng)格三角形中最短的邊長(zhǎng);U為水平方向最大的速度;D為網(wǎng)格三角形中心水深。
2 模型驗(yàn)證與結(jié)果分析
利用2019年12月中旬實(shí)測(cè)大、小潮潮位和流速、流向資料對(duì)模型進(jìn)行驗(yàn)證。其中:潮位驗(yàn)證采用湛江潮位站(21°10′N(xiāo),110°24′E)大潮(12月14日00∶00-12月15日00∶00)和小潮(12月19日00∶00—20日00∶00)資料;流速流向驗(yàn)證包括三條固定垂線(xiàn)(P1~P3)特征點(diǎn)驗(yàn)證。潮位站和觀測(cè)點(diǎn)見(jiàn)圖 2。

圖2 潮位站(S)和觀測(cè)點(diǎn)(P1~P3)
大、小潮潮位驗(yàn)證見(jiàn)圖3,使用目前海岸模型中應(yīng)用最為廣泛的量化指標(biāo)均方根誤差(RMSE)和Skill參數(shù)[8]。RMSE度量模型所預(yù)測(cè)值與真實(shí)值之間的平均差值,其值越接近0,模型的質(zhì)量越好。Skill度量模擬值和觀測(cè)值的相關(guān)性,其取值值越接近1,表明擬合程度越好。
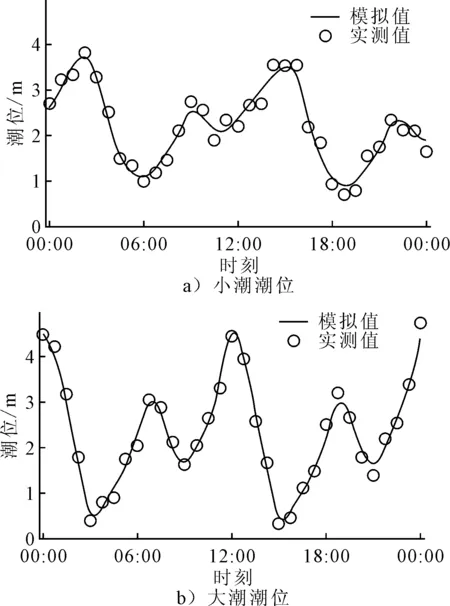
圖3 2019年12月19日潮位模擬值與實(shí)測(cè)值對(duì)比
(3)
(4)
潮位驗(yàn)證結(jié)果表明,所用模型計(jì)算的潮位與實(shí)測(cè)潮位吻合較好好。整體上潮位誤差在12 cm以?xún)?nèi),相位誤差在20 min以?xún)?nèi),符合規(guī)范要求。
大潮期間,模型的RMSE為0.014 1,Skill值為0.990 2;小潮期間,模型的RMSE為0.011 6,Skill值為0.995 6。可以看出,模擬值與實(shí)測(cè)值吻合較好,且小潮的的吻合度高度大潮。
3個(gè)觀測(cè)點(diǎn)流速、流向驗(yàn)證見(jiàn)圖4、5。

圖4 3個(gè)觀測(cè)點(diǎn)流速驗(yàn)證(2019年12月19日)
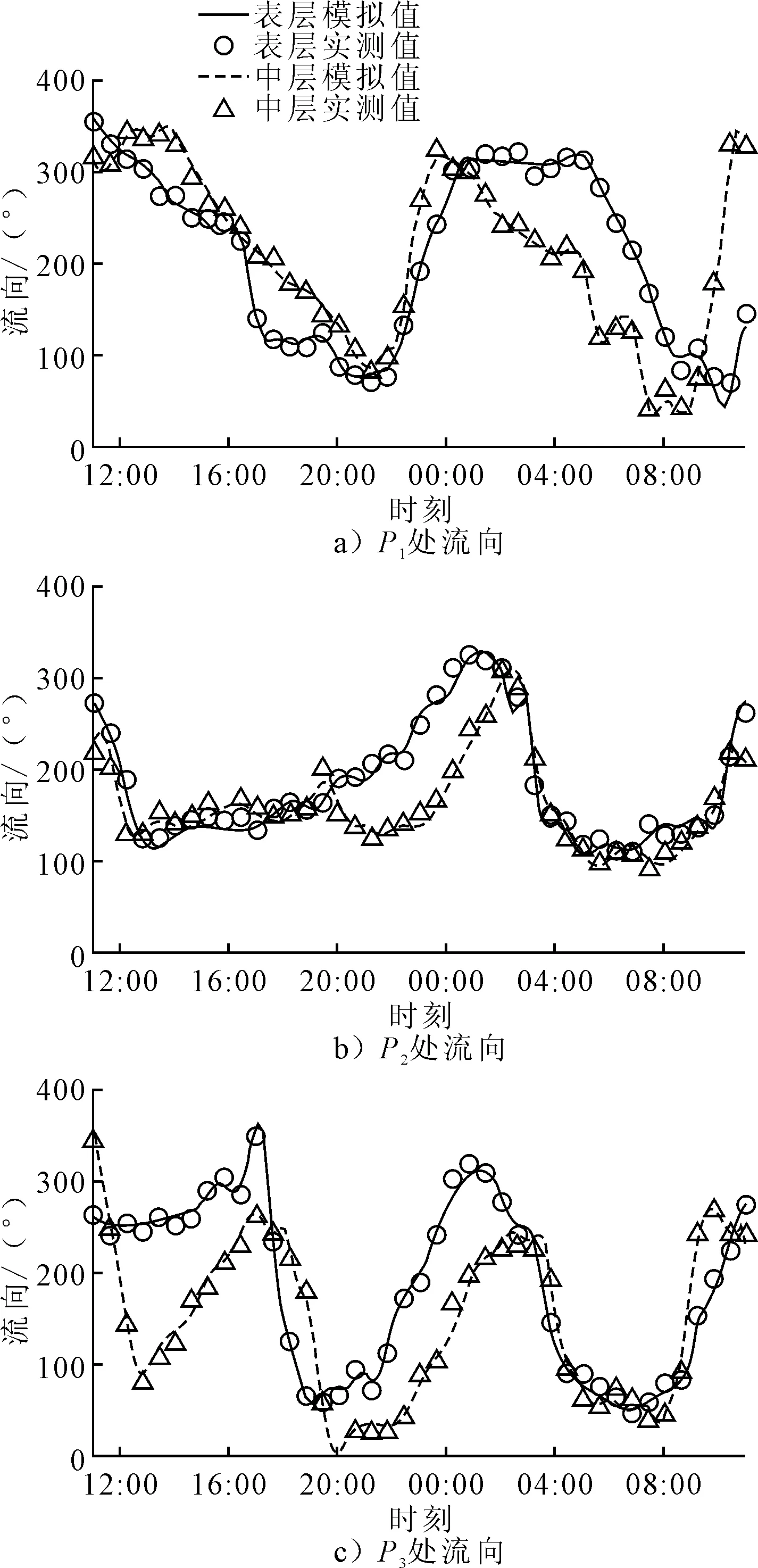
圖5 3個(gè)觀測(cè)點(diǎn)流向驗(yàn)證(2019年12月19日)
從潮流過(guò)程線(xiàn)看出,由模型計(jì)算的流速和流向與實(shí)測(cè)數(shù)據(jù)在垂向表層和中層(約一半水深處)吻合度好,垂向流速由上層至中層的變化趨勢(shì)與實(shí)測(cè)趨勢(shì)一致。總體的漲落潮流速、流向以及轉(zhuǎn)流時(shí)間均與實(shí)測(cè)數(shù)據(jù)吻合度良好。
因此,模型總體上可以表現(xiàn)實(shí)際海域水動(dòng)力場(chǎng)特征。
3 流場(chǎng)數(shù)據(jù)在航海模擬器中的應(yīng)用與分析
3.1 流場(chǎng)數(shù)據(jù)的應(yīng)用
使用航海模擬器電子海圖系統(tǒng)中的CurrentConvert模塊對(duì)計(jì)算結(jié)果進(jìn)行處理,形成配置文件CurrentDisplay.ini和CurrentField.ini。模擬器通過(guò)配置文件CurrentDisplay.ini調(diào)用CurrentField.ini中的數(shù)據(jù)進(jìn)行流場(chǎng)顯示以及水動(dòng)力計(jì)算。
通過(guò)上述模型計(jì)算了2019年12月11日00∶00—20日23∶59湛江港潮流場(chǎng),選取模型穩(wěn)定運(yùn)行階段的計(jì)算結(jié)果,經(jīng)過(guò)數(shù)據(jù)處理后集成到航海模擬器中。航海模擬器電子海圖中顯示的流矢量見(jiàn)圖6。
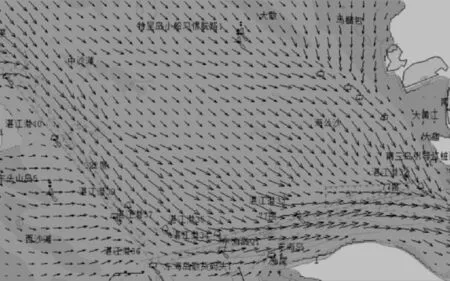
圖6 電子海圖中的流矢量圖
3.2 模擬實(shí)驗(yàn)
3.2.1 試驗(yàn)方案
船舶在進(jìn)出港航道航行時(shí),船速通常較低,風(fēng)、流等環(huán)境干擾力對(duì)船舶運(yùn)動(dòng)的影響顯著[9]。為突出流場(chǎng)對(duì)船舶運(yùn)動(dòng)的影響,設(shè)計(jì)實(shí)驗(yàn)過(guò)程無(wú)人員操縱,使給定初始航速的船舶能夠安全航行。由訓(xùn)練記錄提取船舶的在實(shí)驗(yàn)中的運(yùn)動(dòng)數(shù)據(jù),進(jìn)行處理和分析。
初始位置、初始航向,以及計(jì)劃航線(xiàn)設(shè)置見(jiàn)圖7。實(shí)驗(yàn)設(shè)置起點(diǎn)為湛江港32號(hào)燈浮南面(21°5.067 1′N(xiāo) ,110°30.444 1′E),初始航向設(shè)置為142.3°;主機(jī)轉(zhuǎn)速設(shè)置為20%,以保證船舶可到達(dá)石頭角航道;實(shí)驗(yàn)過(guò)程不進(jìn)行操舵。

圖7 初始船位、初始航向
3.2.2 基本參數(shù)設(shè)置
1)船舶設(shè)置。為突出流場(chǎng)作用效果,測(cè)試使用中型船舶。選用船模為集裝箱船Yinhe,見(jiàn)圖8。船模具體參數(shù):船長(zhǎng)168 m,型寬28 m,型深24.9 m,設(shè)計(jì)吃水9.5 m,排水量28 849 t。
圖8 船模
2)環(huán)境設(shè)置。實(shí)時(shí)動(dòng)態(tài)流場(chǎng)設(shè)置為12月15日11∶30—12∶30的模擬結(jié)果,此時(shí)為潮漲階段;流場(chǎng)數(shù)據(jù)來(lái)自海圖圖幅CN512314.000。風(fēng)、浪定量:3級(jí)風(fēng),風(fēng)向?yàn)?75°;波高為0.5 m;潮汐采用2019年9月15日湛江港潮汐信息,見(jiàn)表1。

表1 湛江港潮汐表
3.2.3 實(shí)驗(yàn)結(jié)果及分析
嚴(yán)格按照試驗(yàn)方案、船模和環(huán)境設(shè)置,進(jìn)行動(dòng)態(tài)流場(chǎng)與模擬器自帶定向流場(chǎng)對(duì)船舶航行影響試驗(yàn)。進(jìn)行多組實(shí)驗(yàn),并對(duì)一組典型的訓(xùn)練結(jié)果進(jìn)行數(shù)據(jù)提取和分析。
不同流場(chǎng)中航速的變化見(jiàn)圖9。
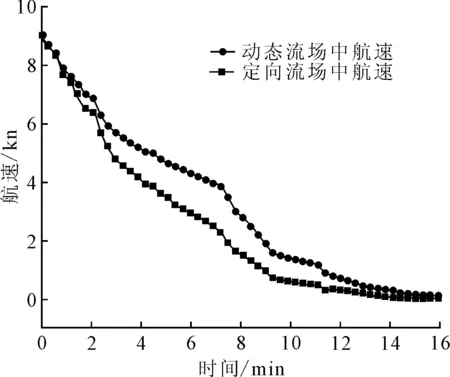
圖9 不同流場(chǎng)中航速的變化
從圖9可見(jiàn):三維動(dòng)態(tài)流場(chǎng)和模擬器自帶定向流場(chǎng)對(duì)船舶航速影響差異明顯:整個(gè)航行過(guò)程中,動(dòng)態(tài)流場(chǎng)中的航速均大于定向流場(chǎng)中的航速,動(dòng)態(tài)流場(chǎng)中的航速變化趨勢(shì)隨時(shí)間發(fā)生變化;定向流場(chǎng)對(duì)航速的作用效果比較單一,不能很好地體現(xiàn)出特定區(qū)域的流場(chǎng)動(dòng)態(tài)作用特點(diǎn)。
不同流場(chǎng)中轉(zhuǎn)艏角速度的變化見(jiàn)圖10。
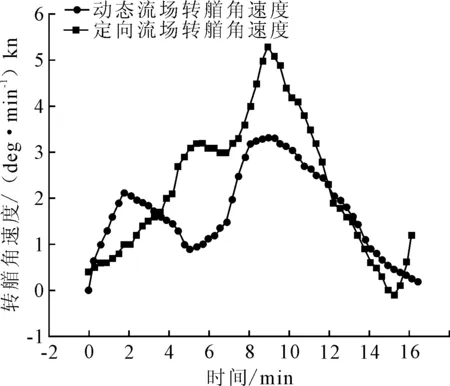
圖10 不同流場(chǎng)中轉(zhuǎn)艏角速度的變化
從圖10可見(jiàn):三維動(dòng)態(tài)流場(chǎng)和模擬器自帶的定向流場(chǎng)對(duì)船舶轉(zhuǎn)艏的作用差異較大:動(dòng)態(tài)流場(chǎng)較好地體現(xiàn)了真實(shí)流場(chǎng)對(duì)船舶轉(zhuǎn)艏的作用,起點(diǎn)處流場(chǎng)受狹窄灣口的影響,水流由灣口由外向?yàn)硟?nèi)擴(kuò)散,方向約265°,使船舶產(chǎn)生較大的右轉(zhuǎn)艏角速度。船舶行駛3 min后,流向接近航道方向約143°,轉(zhuǎn)艏角速度逐漸減小。6 min后,流向接近270°并逐漸增大到305°,轉(zhuǎn)艏角速度再次逐漸增大。與此相比,定向流場(chǎng)未能較好的體現(xiàn)出真實(shí)流場(chǎng)的作用效果。
船舶在精準(zhǔn)動(dòng)態(tài)流場(chǎng)中的航跡見(jiàn)圖11。

圖11 精準(zhǔn)動(dòng)態(tài)流場(chǎng)中的航跡圖
對(duì)比分析發(fā)現(xiàn),航海模擬器中定向流場(chǎng)和三動(dòng)態(tài)流場(chǎng)對(duì)船舶航速和轉(zhuǎn)向的影響有較大差別。三維動(dòng)態(tài)流場(chǎng)更接近真實(shí)環(huán)境的流場(chǎng),使模擬器中流場(chǎng)對(duì)船舶速度、轉(zhuǎn)向的影響更貼近真實(shí)的情況。因此,操船者在模擬器進(jìn)行模擬操縱時(shí),可以得到更為真實(shí)的流場(chǎng)作用感受,可以進(jìn)一步提升操縱者的訓(xùn)練效果;在航海模擬器中進(jìn)行通航安全評(píng)估時(shí),可以更好地評(píng)測(cè)流對(duì)航行安全的影響,進(jìn)一步提升評(píng)估的可信度。
4 結(jié)論
基于FVCOM模式可計(jì)算港口的三維動(dòng)態(tài)流場(chǎng),計(jì)算結(jié)果可應(yīng)用于Dragon V5000型航海模擬器并進(jìn)行船舶運(yùn)動(dòng)解算。不同分層水體流動(dòng)特征不同,三維水動(dòng)力模型更能體現(xiàn)這種區(qū)別,更適于非均勻流對(duì)船體作用力計(jì)算。三維動(dòng)態(tài)流場(chǎng)的應(yīng)用可提升航海模擬器的環(huán)境真實(shí)感和行為真實(shí)感,有利于提升航海模擬器的性能和應(yīng)用效果。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
