極區航海導航與定位保障技術發展綜述
2021-10-27 08:59:00程建華劉佳鑫趙琳
中國艦船研究 2021年5期
程建華,劉佳鑫,趙琳
哈爾濱工程大學 智能科學與工程學院,黑龍江 哈爾濱 150001
0 引 言
近年來,全球氣候變暖,極區冰蓋融化加速,國內外專家預測北極最早于2030 年可出現季節性無冰現象[1]。在經濟全球化、區域一體化發展趨勢下,極區在戰略、經濟、科研、環保、航道、資源等方面的價值不斷提升,受到國際社會的普遍關注。例如,北極作為連接東北亞、歐洲、美洲三大經濟圈最短的海上航道,可使穿越北極東北航道或西北航道的船舶,比繞行蘇伊士運河或巴拿馬運河航線至少節省40%的航程[2];極區資源豐富,原油儲量、天然氣儲量分別占全球總儲量的13%和30%[3]。作為世界貿易大國和能源消費大國,極區航道和資源開發利用可能對我國能源戰略和經濟發展產生巨大影響。因此,經略極地、建設極地,發展“冰上絲綢之路”,成為了國家極地戰略的直接體現。
受到極區未知浪涌、海冰、低溫、低云、濃霧、凍煙、暴雪等極端海洋環境的影響,各類海洋運載器要實現極區順利到達、極區安全航行或作業,必須依賴高精度導航和定位信息支持,這使得導航和定位系統成為極區航道和資源開發的先決保障條件。然而,長期適用于中低緯區域應用的各類導航定位裝備,在面臨南北極區的特殊環境時,又會產生導航定位性能下降甚至無法工作的問題;同時,由于沒有北極八國的天然地理位置優勢,南北極區與我國本土相距較遠,又對導航和定位系統在長航時工作能力方面提出了更高要求。因此,必須通過研究導航和定位系統新機理、新方法,以及技術適應性改進,才能滿足海洋運載器極區導航定位的要求。
要實現極區長航時、高精度、高可靠性導航定位,必須從機理研究出發,系統性分析影響極區導航與定位裝備性能的核心要素,進而通過有針對性的探索和改進,才能滿足應用需求。因此,本文將提出一種新的極區環境要素分類方法,分析這些要素對導航系統的影響,并系統性地總結概括極區導航系統的發展歷史、研究現狀及未來發展,對各類極區主要船用導航系統的技術發展進行綜述,以期為后續開展更為深入的研究提供借鑒和參考。
1 極區導航的發展歷史及現狀
人類對極地探索有著悠久的歷史,從大航海時代到19 世紀末,西方各國眾多航海家出于商業目的,試圖通過取道北冰洋開辟一條前往東方的捷徑。20 世紀初期,現代科學考察活動開始逐漸投入到極區探索中。自此,天文導航、慣性導航、衛星導航、聲學導航、電子海圖等主要導航裝備,通過不斷搭載、應用和改進,逐漸滿足在南北極區的各種軍事和科學考察需要。
由于極區缺少合適的方向基準,因此限制了早期極區的活動范圍,造成極區探索存在諸多危險。主要原因是地球作為一旋轉橢圓體,在地理南北極存在極區北向變化快、南北極點北向缺失的問題。例如,俄國海軍于1914 年第一次駕駛飛機前往高緯度地區是目前可追溯搭載導航設備前往高緯度地區的最早記載[4],但極區缺少合適的方向基準,極大地限制了飛機在北極的航行范圍。1941 年,Maclure 等[5-6]提出了格網導航的概念(圖1),其以陀螺儀作為提供方向信息的設備,并在1945 年“白羊座Ⅰ”號飛往北極點的飛行任務中得到應用[7]。橫向力學編排以赤道上某點作為導航極點,建立橫向地球模型,以沿橫向地球模型經線方向的橫向北向代替地理北向,配合橫向墨卡托投影的極地航圖,解決了極區航行航向選擇難題[8],美國的“鸚鵡螺”號核潛艇在1958 年駛入極區時,其裝備的慣性導航系統便采用該種力學編排方案[9]。
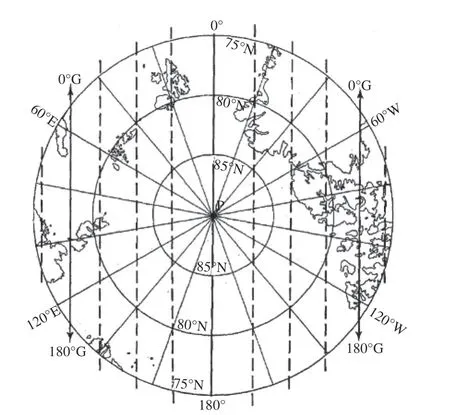
圖1 格網北向示意圖Fig. 1 Schematic diagram of grid north
通過極區科考活動的牽引,人類對極區認知不斷加深,越來越多的極區導航裝備逐漸完成極區搭載航行試驗并獲得應用。例如,俄國科學家在1914 年首飛高緯度區后的一二十年間,進行了大量的極區飛行試驗[10-11],雖然由于保密原因,無法得知俄國極區導航領域取得的進展,但由Harold Gatty 翻譯相關俄文文獻得到的Gatty Report 為美國學習和研究高緯度地區導航立下了極大功勞[12]。1931 年,美國“鸚鵡螺”號潛艇首次探索北冰洋,航行過程中借助六分儀、天文鐘、陀螺羅經和計程儀等設備,以天文定位與推算航法相結合的方式,指引潛艇前往極區,并在陀螺羅經失去尋北能力(潛艇到達 82°N以北時)時,切換至方位儀模式,借助太陽艦位校正航向和推算位置[13]。
從1957 年國際地球物理年開始,北極科學活動大量增加,美國在極區的科研活動也逐漸增多,標志著單純以探險為目的的極地征服時代已經結束,以科學考察為目標的極地開發時期正式開始。在此時期,自動化設備在極區導航領域的應用頻率得到大幅提升,慣性導航系統作為導航自動化的主要代表之一,參與了美國1958 年“鸚鵡螺”號核動力潛艇的極區探索之旅。“鸚鵡螺”號搭載以橫坐標系為導航坐標系的N6A 型慣性導航系統成功穿越極點[9],充分證明了慣性導航系統在極區導航方面蘊含的巨大潛力。作為在美國及北約水下潛艇大規模裝備應用的MK49 型旋轉調制慣性導航系統,也具備極區工作模式[14],霍尼韋爾公司的MAPS 慣性導航設備亦被加拿大用于 84°N區域的導航工作。
衛星導航的極區應用始于1970 年,美國“槌頭雙髻鯊”核潛艇在極區航行時便裝備了導航衛星(Navsat)接收機[9],用于獲取艦位信息,其誤差圓的不確定度為0.2 n mile,俄羅斯研制的基于衛星導航測向的三天線衛星導航羅經MRK-11(圖2),工作區域可延伸至南北極點[15],但衛星導航易受到極區電磁環境因素的干擾,出現無法觀測的情況。

圖2 俄羅斯MRK-11 衛導羅經Fig. 2 Satellite compass MRK-11
通過觀測恒星等天體獲得導航信息的天文導航,作為一種經典導航手段,在極區有著悠久的應用歷史。美國海軍“紅魚”號潛艇、“鸚鵡螺”號核潛艇在北極探索科考活動中,均通過六分儀等天文觀測,為慣性導航系統提供導航校準信息,尤其是1970 年,美國“槌頭雙髻鯊”核潛艇在極區航行中出現慣性導航、衛星導航失效的情況,通過Ⅲ型潛望鏡六分儀,在接近 87°N的區域,通過連續觀測實現了潛艇定位精度優于3 n mile。
聲學導航設備極區的應用,始于1947 年美國海軍“帆鰭魚”號潛艇的聲吶導航設備[9],此后,美國為艦隊級潛艇在極區的航行工作開發了聲吶導航系統,俄羅斯也通過在極區布放水下、水面和冰面浮標,進行聲學導航定位。有統計數據表明,美國潛艇自1976~2000 年間,通過上視聲吶設備,在極區冰下通航、穿越極點達36 次(圖3)。
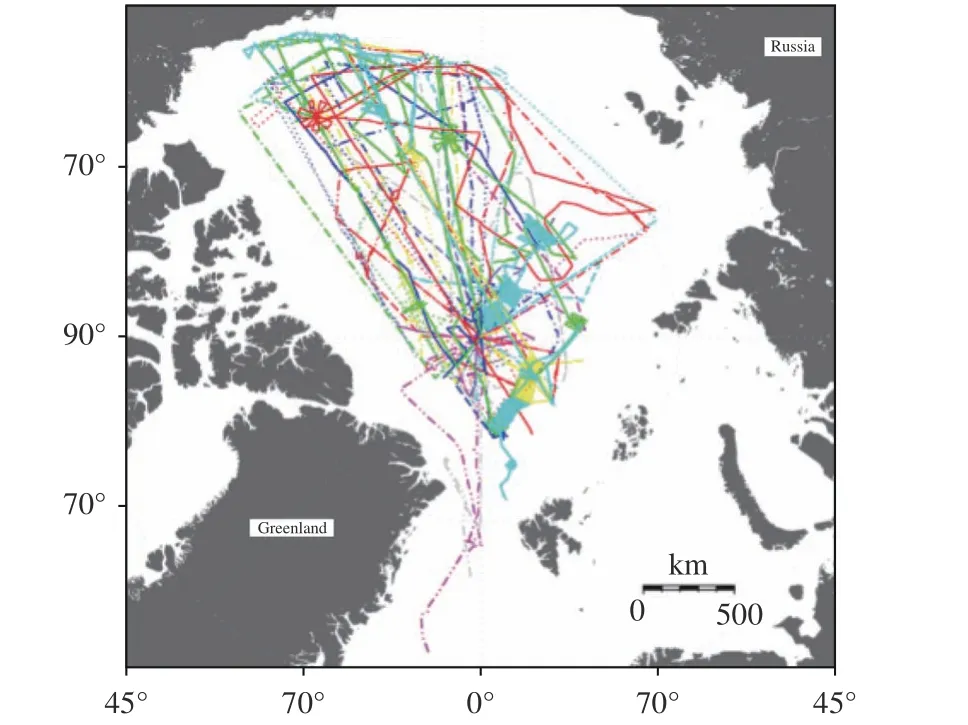
圖3 美國海軍潛艇冰下航線圖(1976—2000 年)Fig. 3 US Navy submarine route map under ice
除慣性導航、衛星導航等位置、速度、姿態傳感系統外,海洋運載器還需要航海圖等航行作業保障設備,實現航路規劃、航線設計等航海作業功能。1941 年英國Maclure 中校除提出格網導航概念外,亦提出了與格網導航相匹配的導航圖所應滿足的條件[5]。此后10 年間,Hagger[16],Moore[17]和Beresford[18]等先后對極區導航圖所需滿足的條件進行闡述,并比較了日晷投影、極球面投影、橫向墨卡托投影等投影圖間的優劣,指出極球面投影最有優勢,且是英國極區航海圖所用的投影方式。1971 年,Dyeer[8]提出了基于橫向墨卡托投影的極區橫向導航技術,將橫向地理坐標系與橫向墨卡托投影相結合來實現極區導航。
目前,美、俄等國在極區船用導航領域已擁有相對成熟的方案。2018 年10 月,美國“杜魯門”號航母取道北極前往挪威參加演習,表明美國在極區船用導航領域已從理論研究轉入實際應用。而俄羅斯在2019 年開展北極圈內的兩棲作戰演習,并展現出了極為豐富的極區作戰經驗,也從側面說明國外在極區航海導航與定位保障技術方面,已達到一定的成熟水平。
2 極區環境要素對導航裝備的影響
地理南北極由于其位置的特殊性,存在諸多與中低緯區不同的特征,包括環境、信號(電磁波、光波、聲波)等。因此,需要建立一套較為完善的分析體系,囊括所有極區的特殊環境,并能清晰全面地分析其對導航系統極區性能的影響。
從地球運動學、地球物理場、氣象水文、地理位置等環境要素角度進行分類,分析比對極區與中低緯區的環境差異,能夠更加清晰、簡潔、全面闡述極區環境的特殊性,及其對導航系統性能的影響,如表1 所示。
由表1 可知,極區特殊的地球運動學環境、地球物理場環境、氣象水文環境和地理位置環境,對慣性導航、衛星導航、天文導航、聲學導航、地球物理場導航、磁羅經和海圖等主要導航系統,均產生了不同程度的影響,主要表現在:
1) 慣性導航系統由于具有自主性、隱蔽性和信息完備性等特點,在極區環境下相較其他導航系統仍具有獨特優勢。但基于傳統力學編排的慣性導航系統的極區應用,存在的首要問題是航向誤差隨緯度升高急劇增大。以力學指北編排為例,去除震蕩項的航向穩態誤差 γs的表達式為
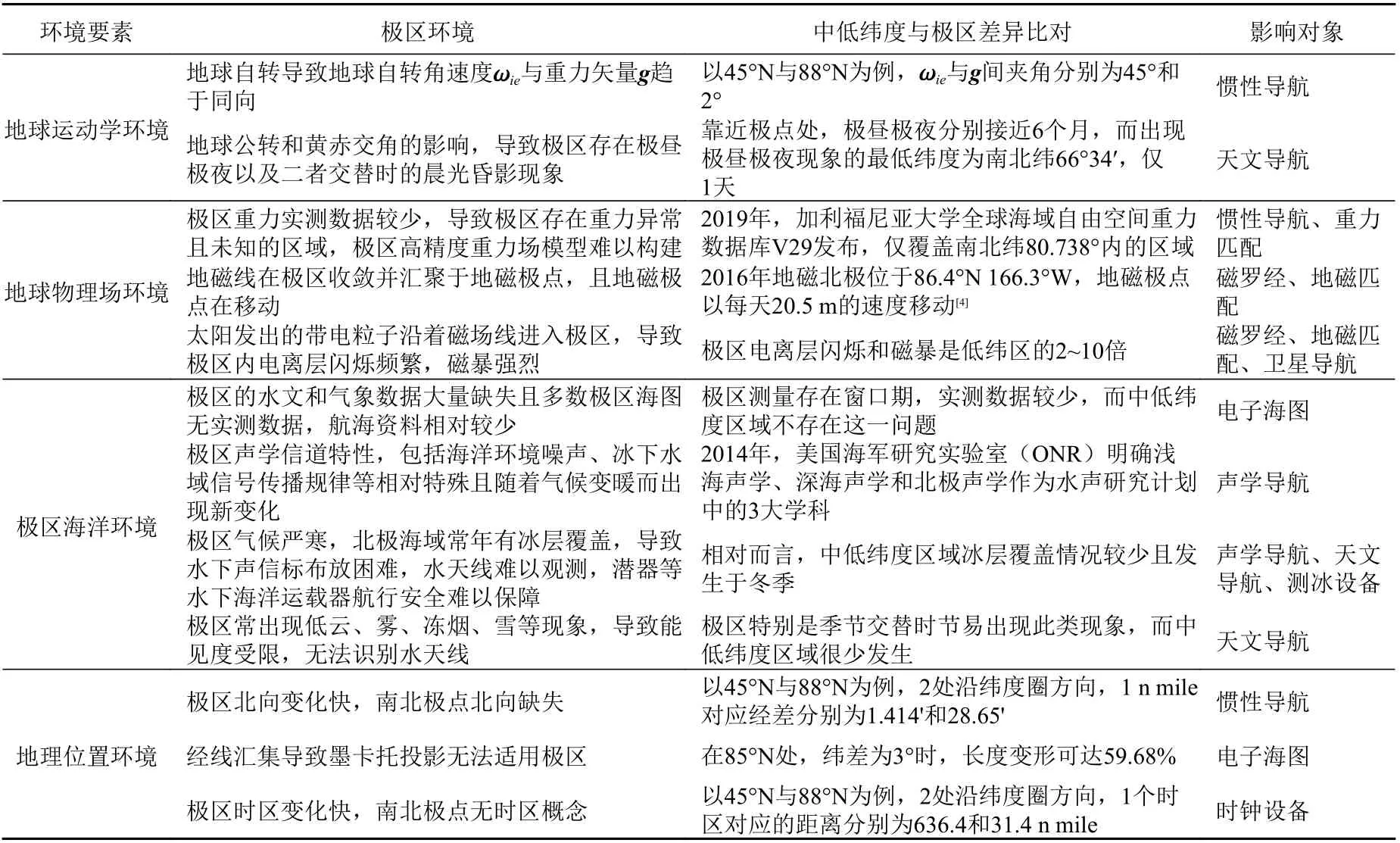
表1 極區環境與中低緯度環境差異對比Table 1 Polar environment and its differences between medium and low latitude environment

式中: ωie為 地球自轉角速度;φ為 緯度; εx為等效東向陀螺漂移。可以看出,航向誤差在緯度趨近90°時,趨于無窮大。
其次,慣性導航系統初始對準能力受重力矢量和地球旋轉矢量叉乘項制約,隨著緯度升高,重力矢量和地球旋轉矢量趨于同向(圖4),北向與方位回路間的耦合效應減弱,最終在南北極點耦合效應消失。
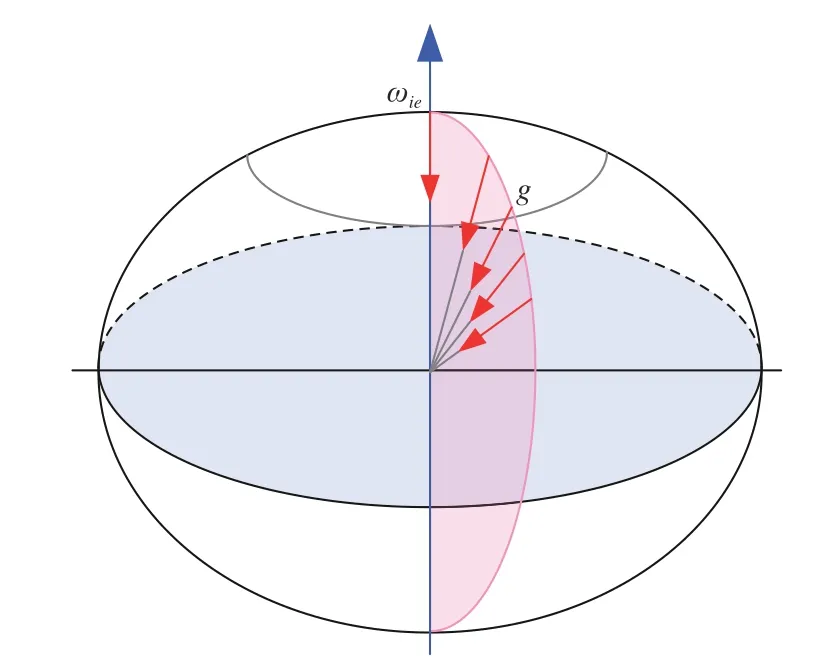
圖4 g 與ωie 趨于同向Fig. 4 g and ωie tends in the same direction
最后,極區重力數據缺失,導致在重力異常區域內需重力參與解算的慣性導航系統誤差增大。
2) 衛星導航在極區應用受限于衛星信號的質量,主要影響因素由3 部分構成[19]。首先,雖然極區可視衛星數目比中低緯度地區多,但多數衛星高度角較低,導致多徑效應明顯,對流層延遲影響增強,使得衛星導航定位信號質量較差;其次,由于磁暴和太陽耀斑周期性發生,總電子含量TEC日間波動劇烈,降低了衛星導航系統精度及連續性;最后,極區惡劣的自然環境亦會增加地基增強系統的建設難度,導致極區衛星導航定位精度難以提升。
3) 天文導航性能受水平基準、可觀測天體個數、天體高度角等因素制約[20-23]。在極區天文導航的應用受到嚴重限制,具體包括低云、霧、凍煙、雪等特殊氣象,會降低能見度,使得水天線難以辨識,海冰覆蓋于海面,亦會干擾水天線的觀測,此外,極夜期間大部分時段缺乏光照,除滿月或極光時段外,水天線不可見,在此情況下,若無人工水平基準或射電天文觀測及慣性平臺等設備提供輔助,將導致天文定位無法進行;另外,極晝期間大部分時段內僅太陽一個天體可供定位,在民用晨光昏影時段(可連續數天甚至數周出現),甚至無任何星體可供定位;同時,極區天象環境亦與中低緯度存在差異,以北極點附近為例,該區域內所有天體均環繞天北極做近似水平的周日視運動,可供觀測星體高度相對固定,其中天文導航中常用的北極星位于天頂點附近,高度角接近90°,失去定位導航價值,而太陽、月亮和航用行星則在大多數情況下出現天體高度角低于10°的情況,亦會導致天文導航無法實現。
4) 聲學導航包含聲學定位、測速、測深、測潛等類型,其中聲學定位系統需要前期在海底布放聲學基陣。在極區應用時,雖然聲學導航工作原理不存在特殊性,但主要受極區冰層分布及特有水聲信道特性的影響。首先,由于冰層覆蓋,加之距我國本土較遠,聲學信標布放難度較大,難以為聲學定位系統提供支持;另外,海冰作為彈性介質,對聲波具有投射作用,海冰?海水粗糙界面對聲波具有散射作用,也會導致海水中聲能量的損失[24];此外,極區特殊的半波導聲道與100~200 m 深度間形成的新的穩定聲信道的存在,影響著聲學信號頻段的選擇;同時,冰層融化、分裂、移動、碰撞導致冰下噪聲劇烈起伏[25],從而影響聲學導航系統的性能。
5) 地球物理場導航主要包括重力匹配、地磁匹配、地形匹配這3 種導航系統[26],其應用的前提是事先獲取海洋運載器經過區域的地球物理特征分布。由于極區高精度重力模型、地磁模型和地形數據缺失,目前在極區內尚無法使用。此外,由于地磁極點移動速度相對較快,目前世界地磁模型僅應用4 年后便需要更新,靠近磁極附近的地磁數據變化較為明顯,在近地磁極點區域無法通過地磁匹配的方式進行導航。
6) 磁羅經在極區會受到多種因素的干擾,影響其指向能力。具體包括:磁極位于極區內,其附近地磁水平分力幾乎為0,使得磁羅經在南北磁極附近失效;極區磁暴多發,亦會擾動極區地磁場,影響磁羅經的指向;地理極點與地磁極點不重合,磁北與真北間存在磁差,且緯度越高誤差越大,例如白令海峽附近磁差可達10°,超出了指向誤差的允許范圍,需要通過修正才可以在極區大部分區域使用[27];由于磁極的運動[28],磁差變化不規則,磁極附近磁差日變化量最高可達10°,亦會影響磁羅經的指向能力(圖5)。

圖5 地磁北極位置變化圖[28]Fig. 5 Map of the position of the magnetic north pole[28]
7) 海圖極區應用的問題集中在海圖投影方式及海圖數據兩方面。就海圖投影方式而言,中低緯度地區常用的墨卡托投影海圖在極區存在角度變形、長度變形和面積變形過大的問題,不適合在極區使用;就海圖數據而言,極區大部分區域未經系統性測量,且海圖繪制多由空中照片制作而成,水文等航海數據匱乏,嚴重影響海圖的可信度。
此外,極區冰層覆蓋范圍較廣,北極冰層一般處于水下30 m 以上的區域,南極冰層最深可達水下400~500 m,嚴重威脅潛器等水下海洋運載器的航行安全。故需研究新型聲學測冰設備,獲取潛器周圍冰層距離及厚度等信息,以保障潛器的水下航行安全。
因此,極區特殊環境影響了慣性導航、衛星導航等主要導航系統的性能,需對各導航系統算法、硬件等方面加以改進,以滿足艦船、潛器等水面、水下海洋運載器極區導航的不同需求。
3 極區主要導航系統技術現狀
隨著極區導航技術的進一步發展,逐漸形成以慣性導航為核心導航設備,其余各導航系統輔助的綜合導航系統。考慮到磁羅經在近地磁極點區域無法使用,極區地球物理場導航觀測數據庫難以構建,因此主要闡述慣性導航、衛星導航、天文導航、聲學導航以及海圖等主要極區導航裝備的相關研究現狀。
3.1 極區慣性導航
結合極區環境對慣性導航系統影響的分析結果可知,以當地地理坐標系為導航坐標系的捷聯慣性導航系統在極區無法正常工作。
而以地心地固坐標系(ECEF)或慣性坐標系為導航坐標系的慣性導航機械編排方案具備極區導航能力,但輸出的導航參數物理意義不明確,且非水平導航坐標系的機械編排方案存在不穩定因素,亦無法勝任遠距離長航時的導航工作[9,29-30]。
在計算機有效字長限制計算性能的平臺慣性導航時代,為克服高緯度地區經線收斂引起的誤差放大問題,游移方位慣性導航機械編排在極區導航領域得到應用,如早期的LN-51 航空慣性導航系統[31]。游移方位慣性導航系統通過引入位置方向余弦矩陣來跟蹤地球自轉,可有效解決計算溢出的難題,但在高緯度地區,從位置方向余弦矩陣提取位置信息存在奇異值,游移角同經度相關無法分離,且游移角的計算誤差隨緯度升高而增加甚至溢出,因此游移方位慣性導航機械編排方案在高緯度地區可正常工作,但無法完成定向和定位任務[32]。
在計算機性能強大的捷聯慣性導航時代,以游移坐標系為導航坐標系的捷聯慣性導航力學編排被應用于極區導航,其中,橫向力學編排與格網力學編排因提供導航信息更為全面,成為適用極區自主導航的兩大力學編排方案分支。
格網慣性導航系統力學編排以與本初子午線平行的格網北向為航向基準,代替地理北向,解決了極區航行航向選擇難題[33]。Ignagni[34]在格網坐標框架下,對地球進行圓球建模,提出了格網慣性導航機械編排方案,輸出格網航向及地心地固坐標系下的位置信息,避免緯度升高經線收斂造成的定向定位參考難題。后續,周琪等[35-36]在此基礎上推導了基于地球橢球體模型的格網慣性導航機械編排,并仿真分析了相關誤差,消除了Ignagni 所提方法中機械編排的原理性誤差,進一步提升了導航精度,可以與極球面海圖、極地立體投影航圖等相匹配,滿足極區航海需求。但其機械編排中經度信息仍參與更新格網角、位置矩陣等重要導航參數的運算,在近極點地區此機械編排存在誤差放大的問題,因此趙琳等[37]在此基礎上提出了去經度的格網機械編排方案,徹底消除近極點地區經度誤差放大對導航性能的影響。
橫向慣性導航系統力學編排的研究首先是基于地球圓球模型,以赤道上某點作為導航極點,通過旋轉地球經緯度建模方式,建立橫向地球模型,以沿橫向地球模型經線方向的橫向北向代替地理北向,以此為基礎設計慣性導航算法。這種算法初步解決了極區難以尋北的問題,但其力學編排建立在地球圓球模型的基礎上[38],存在原理性誤差。因此,出現了基于地球橢球體模型的橫向坐標系力學編排[39-41]。
但目前橢球體模型中出現了2 種橫向經緯度的定義。第1 種依據經緯圈定義橫向經緯圈,進而得到橫向經緯度的定義。即以橫向地軸Z′所在平面切地球表面所得曲線為橫向子午圈,過地理極點的橫向子午圈為橫向本初子午圈,以垂直于橫向地軸的平面交地球表面所得的曲線為橫向緯線圈,如圖6 所示[39-40]。其中,橫向經度 λ1為橫向本初子午面與載體所處橫向子午面間的二面角,橫向緯度L1為 橫向子午圈上P點處切線的法線PB與橫向赤道平面間的夾角。第2 種以地理垂線與各面間夾角來定義橫向經緯度,如圖7 所示[41]。橫向緯度L2為 橢球體上P點的法線PQ與橫向赤道平面的夾角,橫向經度 λ2為PQ在橫向赤道平面的投影MQ與X′軸的夾角,橫向經、緯度相同的點的連線構成橫向子午圈與橫向緯線圈。
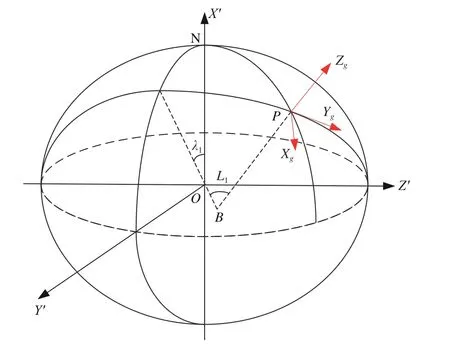
圖6 傳統經緯圈定義方式Fig. 6 Traditional latitude and longitude circle definition
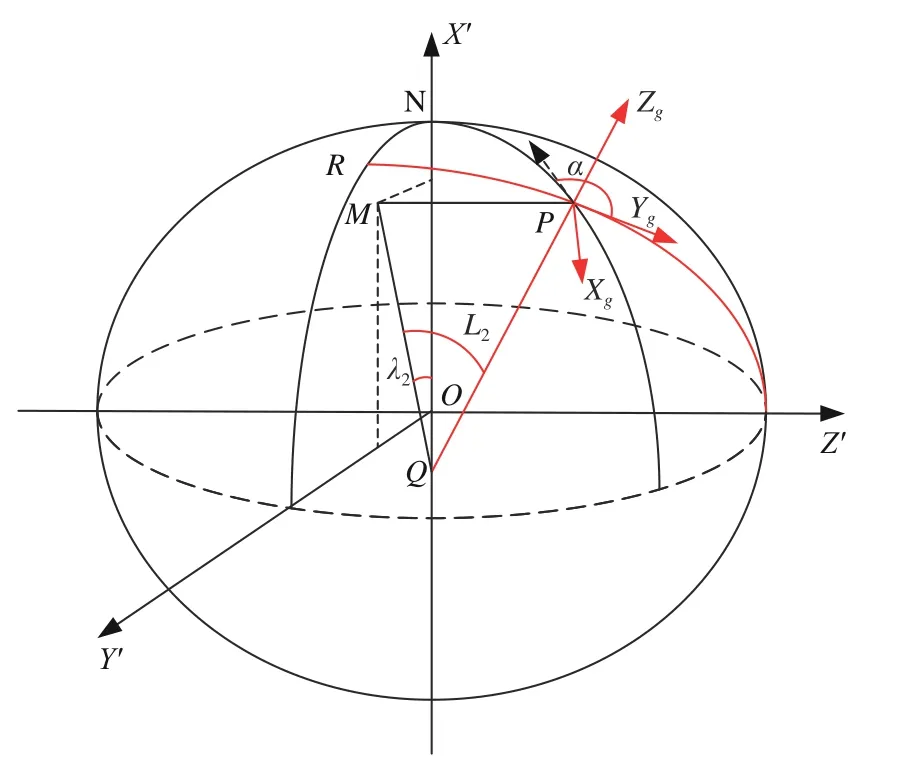
圖7 垂線經緯度定義方式Fig. 7 Vertical latitude and longitude definition
第1 種定義方式建立的橫向地理坐標系,其天向Zg與P點法線間存在小角度,即該坐標系不是當地水平坐標系。若將此橫向地理坐標系作為導航坐標系,顯然沿Zg方向的速度積分無法代表高度的增長,該定義下的力學編排存在較大的原理性誤差,并不穩定;而第2 種定義方式建立的橫向地理坐標系不存在上述問題,因而后續研究多基于此開展。
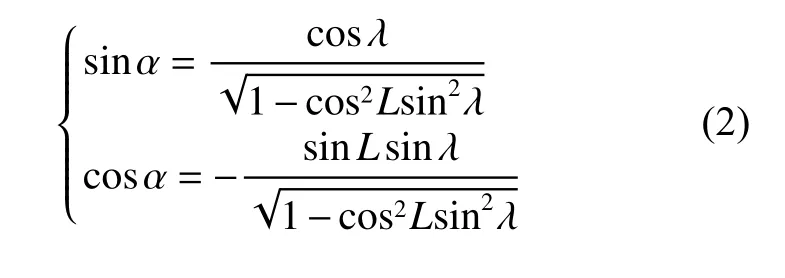
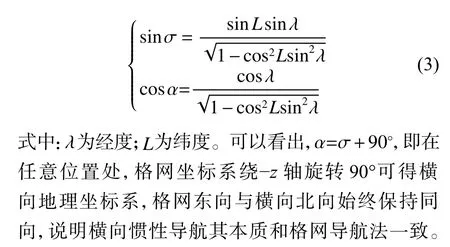
第2 種定義方案其本質與格網導航法一致,以文獻[39] 與[41] 中橫向慣性導航力學編排與格網慣性導航力學編排為例,其中橫向角 α與格網角 σ的公式為:
圓球模型引起的幾何誤差隨慣性導航運行時間發散,而橢球體模型則不會導致這一問題[42],因此該方法有效提升了導航精度,但基于橢球體模型的橫向坐標系力學編排需對地球進行二次建模,導航參數更新算法較為復雜,且與其他導航設備之間存在地球模型兼容性問題,增加了多源導航信息融合的負擔。針對這一問題,出現了基于虛擬圓球的橫向力學編排[43],這種方案簡化了橢球模型方法的復雜編排,但其實質是在橫向慣性導航力學編排中,將卯酉圈、子午圈半徑代替橫向卯酉圈及子午圈半徑,從而簡便計算,但仍不可避免地引入原理性誤差。
除格網慣性導航與橫向慣性導航兩大力學編排方案外,近年來還出現了基于地球坐標系的法向量慣性導航力學編排方案[44]、基于偽地球坐標系的全球導航方案[45]和基于極球面網格航向基準模型的慣性導航方案[46],為全球(含極區)導航提供了新的思路。其中,法向量導航方案可適用于全球范圍,具有良好的應用前景;而偽地球坐標系慣性導航力學編排其實質是對地球模型的重構,將初始時刻的當前位置重構為偽地球模型中偽赤道上的某點,以此保障慣性導航長時間工作于中低偽緯度區域,即長時間保持導航坐標系不變。但該方法建立在地球圓球模型的基礎上,存在較大的原理性誤差,而基于橢球體模型的偽地球坐標系導航又存在偽卯酉圈半徑運算復雜,導航參數轉換較為復雜的問題;格網航向基準與極球面格網航向基準雖然定義方式不同,但其本質相同,故極球面格網導航與格網慣性導航機理相近,解算過程略有差異。
3.2 極區衛星導航
全球主要的四大衛星導航系統分別是美國GPS、俄羅斯GLONASS、歐洲Galileo 和中國北斗衛星導航系統(BDS),目前均已建成或完成改造。由于北斗三號系統在近期組網完成,國內對北斗系統及其他衛星導航系統的極區定位性能分析較多。鄂棟臣等[47]研究表明,GPS 和GLONASS接收機在極區可使用。于清德等[48]通過仿真實驗分析了高緯度地區GPS,GLONASS 和Galileo 的幾何性能,結果表明GLONASS 在極區擁有最好的幾何性能。劉志平等[49]借助各衛星導航系統的星歷數據,分析了GPS,GLONASS 和BDS 可見性及可用性的概率分布特征,結果顯示GPS 可見衛星數最高,GPS 和GLONASS 更適用于極區環境。楊元喜等[19]分析了北斗當前星座及北斗三號系統全球星座在極區的可用性,結果顯示,現有星座下,北斗系統暫時不具備導航定位及授時能力,在北斗三號建設完成后,可獨立為極區提供導航定位能力,但仍存在一些問題需要解決。焦博等[50]借助“雪龍”號科考實測數據,分析了北斗系統在南極地區的導航服務性能,結果表明,北斗在90%以上時段可提供20 m 以內精度的導航信息,滿足基本導航需求。徐煒等[51]通過仿真計算評估了BD,BD2 和GPS 及其組合系統在極區內的定位性能,BD2 覆蓋性能低于GPS,GPS/BDS組合精度更優。倪煜淮等[52]通過仿真分析了北斗三號系統與GPS 的定位性能,結果顯示北斗系統定位性能均優于GPS,但穩定性稍弱于GPS。陳闖等[53]借助全星座仿真數據,分析了GPS,BDS及二者組合系統在南極中山站附近的定位效果,結果顯示,BDS 定位能力優于GPS,二者組合后可明顯提升極區的導航定位性能。
此外,國內學者亦對極區衛星數據質量、衛星導航定位技術及其誤差特性開展了研究。姚翔等[54]提出了BDS 與GPS 極區精密定位技術(PPP),結果表明該方法可行但部分區域仍無法定位,組合系統比單系統性能更好。左宗等[55]借助極區北斗實測數據,全面分析了北斗系統在極區的數據質量特征,結果表明觀測數據質量受高度角影響大,信噪比整體水平較低,與GPS 相當,多路徑效應嚴重,觀測數據受電離層活動影響大且存在時段差異;同年,又分析了極區衛星導航精密單點定位誤差特性,表明季節變化對衛星導航多路徑誤差的影響可達1~3 cm,對流層天頂總延遲精度在10 mm 以內,可滿足極地對流層反演等應用的要求,電離層擾動對衛星導航定位性能影響較大[56]。
3.3 極區天文導航
國內外極區天文導航領域文獻相對較少。國外文獻多集中于上世紀50 年代前后。1949 年,Sadler[57]設計了極區天文導航表,并給出了永久恒星表樣本;同年,Zaccheo[58]對極區飛行過程中天文導航面臨的問題進行了詳細描述;1952 年,Collins[59]研究了北極圈內利用大圓位置線進行天文導航的方法,并分析了該方法的優點。國內極區天文導航領域的研究可追溯至20 世紀80 年代末,郭洪貴等[20]介紹了極區天文觀測的特點及航行天文定位方法,并指出由于恒星可觀測時間的限制,此方法在極區可用時間較短;郭德印等[21]介紹了高緯度地區天文導航觀測的特點;唐正平等[22]研究了極區艦船天文定位誤差修正和換算方法,提高了極區天文定位解算精度;芮震峰等[23]詳細分析了極區特殊航行環境及其對天文導航的影響,探討了極區航行中天文導航面臨的問題,并給出了相應解決對策,但其可用性仍需進一步檢驗和完善。然而,由于近年來天文導航研究多集中于深空探測領域[60],極區關注度較低,暫時沒有關于極區天文導航相應解決對策的深入研究。
3.4 極區聲學導航
極區聲學信道特性的研究是開展極區聲學導航適應性改進的基礎,通過研究極區水聲傳播特性,掌握信道分布和頻率響應特征,即可選取適合通信和導航的深度和頻率,提升聲學信號的傳播距離,推動超遠程聲學導航發展;通過對北極地區水聲冰面散射特性研究,分析并了解多途結構和頻率響應特征,可提升冰下中近程聲學導航性能;通過對環境噪聲特性及冰?水界面的聲反射和散射特性研究,建立北極環境噪聲預測模型和水聲傳播損失模型,可減少噪聲干擾對聲學導航的影響,最終實現對極區聲學導航的適應性改進[24, 61-62]。
2000 年以后,由于氣候變暖,不僅影響海冰分布,同時也改變了冰下水體結構,使極區聲學規律發生改變。因此,以美歐為首的各國紛紛開展了相應的北極聲學研究項目及計劃。2008 年,歐盟各國開展了名為ACOBAR 的北冰洋中部觀測項目,目前已進行了2 期,意在發展一個集聲層析、水下平臺數據傳輸、冰基漂流浮標和滑翔機通信與導航為一體的北冰洋中部海洋環境監測和預報系統。美國于2015 年開展了加拿大海盆地聲傳播試驗CANAPE 等相應的研究計劃,以期確定“新”北極海域冰?海作用下的水聲及聲吶信號處理的新模式及新參數,目前在冰下導航領域已取得一定進展。2014 年,美國伍茲霍爾海洋學研究所(WHOI)與華盛頓大學在北冰洋波弗特海進行了冰下遠程水聲移動通信定位試驗,試驗中通信距離超過400 km 時的通信速率仍可達每秒數比特,成功地解決了滑翔機水下通信和定位的問題。
目前,我國關于極區聲學導航的研究尚停留在聲學信道特性等基礎理論研究層面。2014 年,我國第6 次北極科考中首次設立了水聲學的科考內容,當時我國北極聲場特性研究尚處于空白狀態,北極聲學數據亦極為稀少;2016年,我國中科院聲學研究所科考人員第1 次前往北極開展聲學試驗;此后每年北極科考中均包含水聲學的考察內容,特別是在第9 次北極科考中開展了為期15 天的北極及毗鄰海域聲學導航試驗,獲取了大量實測數據,為北極聲場特性的研究提供了有力支撐。
2018 年初,哈爾濱工程大學和俄羅斯遠東聯邦大學、俄遠東國立漁業技術大學就成立“北極海洋環境與聲學技術聯合實驗室”達成框架協議,國內其他單位也相繼在該領域開展了工作。分析現有文獻可知,目前國內在極地冰區海域水聲環境特性、目標聲特性、典型冰區水下聲信道信息傳輸等方面取得了初步進展[63-65],但在極地聲學信號處理研究領域仍處于起步階段,缺乏極區聲學實驗經驗及常規觀測系統。關于極地海洋環境綜合觀測及參數獲取、極地海洋水聲波導效應及應用等基礎理論及應用的研究亟待加強,以此推動我國極區環境下聲學導航系統的適應性改進。
3.5 極區電子海圖
在極區電子海圖數據方面,2013 年中遠集團旗下的“永盛”輪首航極區,便安裝有中遠集團自主研發的SEAPARD 系列電子海圖產品,但并未明確提及電子海圖數據的覆蓋范圍。此外,我國出版的中國官方海圖中,尚未包含極地地區的海圖。北冰洋大部分水域,尤其是北緯75°以上根本沒有海圖。因此,電子海圖系統中也沒有任何航海信息。目前,我國艦船使用的電子航海圖系統主要以沿海低緯度海區圖為主。而北極沿岸國家(如美國、俄羅斯、加拿大等)均已發布本國北極近海海域電子海圖數據。英國海道測量辦公室電子海圖軟件中極區民用航海圖已基本覆蓋北極近海海域[66],最高可達80°N,但在北極點周圍海域仍存在大量空白。
在極區導航圖投影方面,國外研究較早,但多集中于航空圖領域,主要在導航方法基礎上對極區投影方式展開探討,以定性分析為主,缺乏對其變形特性及誤差分布特性等方面的定量分析,而極區海圖投影相關文獻則多集中于2010 年后且數目相對較少。2012 年,李樹軍等[67]從海圖投影、制圖資料、專題符號、海圖分幅等4 個方面,研究了當前編制北極地區航海圖需解決的關鍵問題,是國內極區航海圖研究的開端。2013 年,Skopeliti等[68]探討了電子海圖中極區航海圖應采用的投影方式,建議北極區域使用等距離方位投影和等角方位投影,是國外第一次在公開文獻中專門從極區航海導航的角度,對海圖投影進行較系統和深入的研究。目前極區常用的海圖投影方式主要包括極球面投影、橫軸墨卡托投影和日晷投影[69]。
極球面投影是以地球極點S(或N)為視點的透視方位投影(圖8),其投影平面P 相切于另一地球極點N(或S)或割于某一緯線。通用極球面投影(UPS)是1989 年美國國防制圖局(DMA)推薦北緯84°至北極和南緯80°至南極間的區域應用的投影方式。Naumann[70]對極球面投影上用直線代替大圓航線所造成的航向誤差和位置誤差進行了定性分析;溫朝江等[71]在此基礎上做了定量分析,結果顯示極球面投影可滿足極區海圖投影要求。此后,溫朝江等[72]對極球面投影下的海圖分幅、精度、對應航法、正反解公式等方面展開研究,提出了極球面海圖的自動分幅設計算法;分析了雙重極球面投影在極區的變形規律,證明雙重極球面投影海圖與極區地球橢球體模型相吻合,可滿足高精度極區航海導航的需要[73];給出了極球面投影格網坐標與地理坐標系間的正反解公式[74];推導了極球面投影海圖上大圓航線和等角航線的方程,定量分析兩者間的差異,提出了一種基于大地緯度的等距量距法,解決了極球面海圖上精確量距問題[75],并擴展應用至雙重極球面投影海圖上[76];隨后又提出了一種基于極球面投影的極區格網等角航線,可與格網導航、極球面投影精確配合,應用于極區航行[77]。
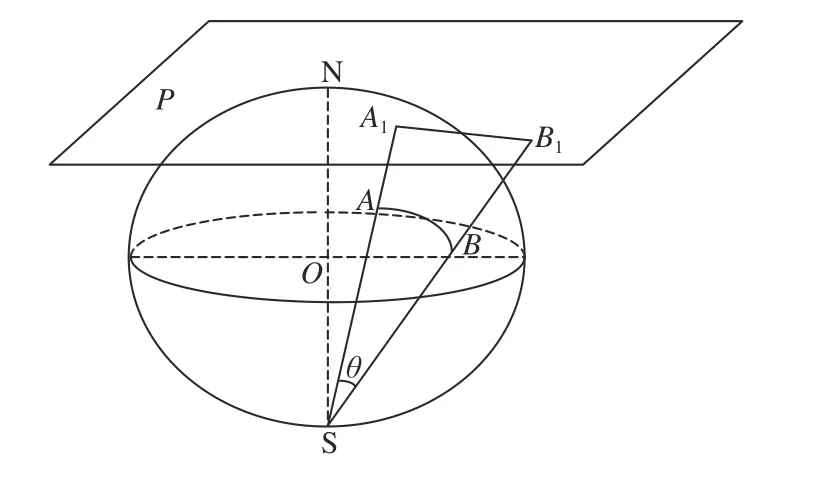
圖8 極球面投影Fig. 8 Polar stereographic projection
橫軸墨卡托投影是一種等角橫切圓柱投影(圖9),將圓柱面與地球橢球體上某一經線相切,其圓柱的中心軸與赤道平面重合。通用橫軸墨卡托投影是前蘇聯的大比例地形制圖所采用的投影方式[21]。Peter[78],Gdowski[79],Karney[80]等推導了球體橫軸墨卡托與橢球體橫軸墨卡托投影的計算公式。李忠美等[81]推導了極區橫軸墨卡托投影的非奇異公式。英美等國相關文獻中通常將高斯投影也稱為橫軸墨卡托投影[82-83],而我國學者在早期研究中常將二者區分開,各國間存在認知差異。因此,李忠美等[84]針對高斯投影與橫軸墨卡托投影間的聯系進行了嚴密的數學推導,證明高斯投影與橫軸墨卡托投影間具有等價性,故高斯投影的長度變形、角度變形等特性與橫軸墨卡托投影一致。王海波等[85-86]構建基于橫向地球模型的橫軸墨卡托海圖,并提出了基于橫軸墨卡托海圖的極區航行方法。溫朝江等[87]推導了基于雙重投影的橫軸墨卡托投影方法,可消除與導航系統采用的地球模型不同產生的誤差,滿足極區高精度航海導航需要。

圖9 橫軸墨卡托投影Fig. 9 Transverse Mercator projection
日晷投影是一種視點位于球心O的透視方位投影(圖10)。《中國航海圖編繪規范》(GB 12320-1998)規定緯度75°以上區域采用日晷投影。日晷投影的研究多集中于2000 年以前且已經較為成熟。1984 年,華棠[88]研究了基于雙重投影的日晷投影方法,有效提升了海圖精度;1990年,楊啟和[89]改進了球心投影,改善了制圖區域的變形分布,開拓了日晷投影的應用前景;2000年,丁佳波[90]在雙重日晷投影法基礎上進行了深入分析,闡明了橢球面日晷投影的重要特性及應用。
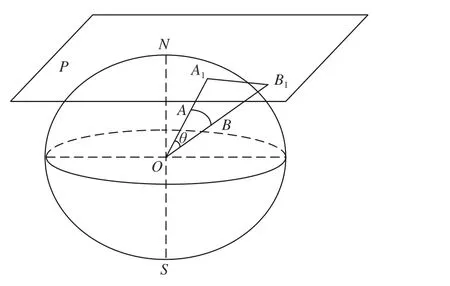
圖10 日晷投影Fig. 10 gnomonic projection
海圖投影相關文獻中還包括對各海圖投影間的對比分析,張曉平等[91]推導了極區球面高斯投影非奇異公式,并結合日晷投影進行了長度變形定量分析,本文在此基礎上,進一步定量分析了極球面投影長度變形,如表2 所示,其中,φ為緯度, λ為經度。由于高斯投影與橫軸墨卡托投影的等價性,可認為極球面投影與橫軸墨卡托投影長度變形小于日晷投影。李厚樸等[69]研究了極球面投影、橫軸墨卡托投影和日晷投影的直接變換問題,系統推導了任意2 種投影間的直接變換公式,供極區海圖投影變換和航海導航參數計算使用。

表2 極球面投影、高斯投影及日晷投影在高緯度的長度變形對比Table 2 Length deformation comparison of polar stereographic projection, Gaussian projection and gnomonic projection in high latitude
4 結 語
導航系統作為海洋運載器的航向安全保障,在我國的極區發展戰略中起著重要作用。本文通過比對極區與中低緯度區的環境差異,詳細分析了極區環境的特殊性及其對導航系統性能的影響,并結合理論分析,對慣性導航、衛星導航、聲學導航、海圖等船用導航系統在極區的研究現狀作了全面闡述。展望未來,我國極區船用導航技術將朝著以下幾個方向發展:
1) 地形匹配技術。地形匹配導航作為一種自主性、無源性的導航系統,適合在極區惡劣環境下使用,其應用主要受制于極區海底地形數據的匱乏。在海底地形測繪領域,同以往常用的寬波束回聲測深儀相比,多波束測深系統擁有波束窄、橫向覆蓋范圍大、效率高等特點,在冰覆蓋區亦可使用,且可繪制海底的三維地圖,適用于極區地形大面積的精確測量。隨著多波束測深技術的逐漸成熟,極區海底地形測繪的難度大大降低,獲取數據更為詳實,制約極區地形匹配技術的主要因素將在未來數十年內得到解決,屆時地形匹配將成為極區重要的輔助導航系統。
2) 極區定位、導航、授時(PNT)系統。極區PNT 體系是我國國家綜合PNT 體系建設的重要組成部分,可以為用戶提供精確、連續、可靠的位置、時間和速度信息。為保障PNT 建設,需要提供基于不同原理的冗余信息源以及相應的多源信息融合技術。對極區水面和水下應用環境而言,需結合不同環境對艦艇導航能力的差異需求,完善各船用導航系統的適應性改進,并針對現有導航系統在極區精度連續性較差的問題,研究低品質觀測下的多源信息融合技術。
3) 極區船用導航系統仿真驗證與評估技術。在船用導航設備進行適應性改進后,導航設備需通過試驗與評估,對關鍵技術突破情況進行驗證,以便規避風險。而極區地處高緯度地區,距我國本土較遠,環境惡劣,每年可供航行的“窗口期”時間較短,實測數據獲取難度較大;同時,極區在地球運動學、地球物理場環境的特殊性,導致在中低緯區無法復現真實的物理場景,造成陸上實驗亦難以實現。構建適用于極區的導航系統綜合性能評估體系,通過仿真驗證來實現對極區船用導航系統綜合性能的評估,可作為未來極區實地測試的補充,有效規避風險。
