“雪龍2”號極地考察船月池系統的設計與應用
2021-10-27 08:32:46陳清滿王碩仁趙炎平袁東方夏寅月沈悅廖周鑫
中國艦船研究 2021年5期
陳清滿,王碩仁,趙炎平,袁東方,夏寅月,沈悅,廖周鑫
中國極地研究中心,上海 200136
0 引 言
月池主要應用于海洋工程領域,是一種從水面一直連通到水體內并貫穿浮體結構的結構物統稱。傳統的月池主要包括兩個方面的應用:一是在惡劣海洋環境中營造出比浮體周圍環境更穩定的小環境,用于保護入水的設備,例如某些深海浮式生產平臺(張力腿平臺、半潛式鉆井平臺和浮式生產儲運系統等)和新建的極地科學考察破冰船(以下稱極地考察船)上設計的月池結構;二是采集海洋波能,例如通過特殊設計在特定條件下加劇月池內海水整體沿垂直方向上下振蕩(類似發動機缸內活塞運動的“活塞”現象[1-2])和沿水平方向左右振蕩的“晃蕩”現象,從而提高波能轉換效率。這些波能采集系統包括了振蕩浮子式、振蕩水柱式、鴨式和擺式等形式[3]。
上述應用是利用月池系統特點的兩個極端例子,即一方追求的效果是另一方極力避免的。當月池內出現“活塞”和“晃蕩”現象時,水體對月池內設備的作用力急劇增大,導致非工作狀態下設備的位移,甚至結構破壞,影響設備的正常運行。但是,對于波能轉換裝置而言,月池內自由液面的升降及波面上下劇烈運動的情況下,“活塞”現象越劇烈,越有利于提高波能轉換效率。
隨著對南極探索和資源開發利用的不斷深入,面對極地的惡劣環境,在極地考察船上也相繼運用了一些新技術。例如,作為綜合性考察船,其所搭載的實驗室及科考調查設備均需滿足多學科的調查采樣、實驗分析需求[4],因此通常會配備有溫鹽深儀(CTD)、浮游生物垂直拖網、遙控無人潛水器(ROV)和自主水下航行器(AUV)等,這些設備也大都需要絞車、A 型架等甲板支持系統從船上布放,調查取樣完成后再回收至船上。開展一般的大洋調查時,這些設備可以從舷側或船艉順利布放和回收,但是,在極地大洋這種惡劣環境下開展科考作業經常會受到浮冰及固定冰的影響,使得從舷側或船艉布放和回收設備變得不可能,即使是布放初期洋面無浮冰,在長達3~4 h 的作業期間隨風流漂過來的浮冰也會對纜繩及待回收設備構成較大的威脅。例如,2014 年3 月,我國開展第30 次南極科學考察時“雪龍”號船在普里茲灣科考作業遭遇了嚴重冰情,大部分斷面站點受到浮冰影響而無法正常作業,部分科考計劃因此而“擱淺”[5]。這種案例還有很多,限于篇幅,不再贅述。
綜上,在極地考察船上設計安裝月池系統可以在船底區域營造出免受浮冰影響的小環境,有利于科考調查設備的正常投放和回收,解決極地考察船在極地冰區無法開展科考作業的難題,使其能夠在秋、冬兩季和更高緯度的極地密集浮冰區開展作業,極大地提升作業效率和能力。鑒此,在極地考察船上設計月池系統開始受到重視。
截至2018 年的統計,全球現役極地考察船約有91 艘,實際配備了月池的船舶數量遠小于海洋工程平臺,而供極地考察船使用的月池設計技術仍處于探索和試驗階段。不僅如此,月池的設計和使用還面臨一些有待克服的難題。例如,國外一艘極地考察船(北極破冰調查船)月池內出現了較嚴重的碎冰堆積的現象,在進入冰區后短時間內月池底部就凍結了厚厚的冰坨,使月池無法正常發揮功能。可見,在極地考察船上應用月池系統也需要不斷積累經驗。目前,我國僅服役了“雪龍”號和“雪龍2”號兩艘極地考察船。在“雪龍2”號船2019 年開始運營前,我國極地考察船僅能夠從舷側布放和回收科考調查設備,而且經常受到極地惡劣冰情的影響,無法在密集度較高的冰區開展科考作業和獲取相應數據和樣品,導致科考計劃需要被動地根據現場冰情調整。隨著“雪龍2”號船的服役,其設計安裝的月池系統解決了在密集冰區調查采樣的難題,也填補了我國極地考察船設計建造和應用月池系統的空白,為后續同類型系統的設計建造積累了經驗。
本文將根據“雪龍2”號船月池系統的設計建造情況,介紹月池系統的設計原理、實現方式和極區應用等,并重點對月池水密底蓋設計、月池井道消波設計、科考調查設備布放和回收、極區低溫環境設計等方面進行分析。
1 極地考察船的月池尺寸
各國擴大在南極大陸和海域的實質性存在是爭奪未來各項重大權益的唯一選擇。美國、俄羅斯、英國、澳大利亞、新西蘭等國都公開聲稱將以在《南極條約》體系中的領導地位作為戰略目標,通過建造和裝備新一代極地考察船,加強在南極大陸架的勘測、海洋資源調查和環境調查研究能力,以強化和保持其領導地位。2008 年和2009 年,日本和韓國分別建造完成了“白瀨”號和Araon 號極地考察船,中國也于2019 年首次自主建造完成了“雪龍2”號極地考察船。表1 所示為各國將月池系統作為重要裝備的新建極地考察船。
由表1 可見,各國新建的極地考察船中月池的主要用途均為布放和回收CTD 等科考調查設備,但月池的結構、開口尺寸和技術細節等差別較大。月池的開口尺寸由主要投放和回收設備的尺寸和船舶破冰等級所決定。鑒于月池系統的復雜性及其對船體的重要影響,月池的開口尺寸通常以滿足布放和回收設備的尺寸需求作為臨界值。根據多數極地考察船的經驗,月池系統從論證、設計到最終建造完成,尺寸存在減小的趨勢。破冰等級越高的船舶,在更為嚴峻的冰情下科學調查功能的實現對月池的依賴程度越大,其尺寸也相對較大,而破冰等級越低的極地考察船對月池的依賴程度反而越小。我國“雪龍2”號船的破冰等級居中,根據極區大洋科考調查的實際需求,月池系統必須滿足CTD(24 瓶位10 L,采水器直徑1.55 m)和生物垂直拖網(組合網具尺寸小于CTD 直徑)作業的要求,結合船體總體設計方案,最終選取月池尺寸為3.2 m ×3.2 m。

表1 國內外含月池設計的新建極地考察船Table 1 Summary of new polar research vessels with moonpool design across the world
2 “雪龍2”號船月池系統的概述
2.1 月池配備需求
“雪龍2”號船隸屬于自然資源部中國極地研究中心,作為我國深化設計并自主建造的首艘極地考察船,其破冰能力為PC3 級,可在混有陳冰的次年海冰的兩極水域航行作業,能連續以2~3 kn的速度在厚度不低于1.5 m 的平整冰(外加0.2 m雪)中艏、艉向破冰航行,其中艏向航行具有沖撞破冰能力,艉向航行可確保在20 m 厚的當年冰冰脊(含4 m 堆積層,外加0.2 m 雪)下不被卡住。相比“雪龍”號船只有艏向破冰能力(艏向航行能以1.5~2 kn 的速度連續破1.2 m 厚的冰(含0.2 m的雪)[6]),“雪龍2”號船的破冰能力得到了提升,可延長船舶冰區作業的時間窗口,一定程度上拓展了作業空間范圍,且通過在“雪龍2”號船上配備月池系統,克服了原先在密集冰區內僅能從舷側布放和回收設備的限制,獲得了與“雪龍2”號船拓展破冰能力相適應的冰區科考作業能力。
在“雪龍2”號船項目建議書、可行性研究報告階段,為明確該船設想的科學任務需具備的船舶性能特征,以及使船舶設計建造與科學需求、科學任務相匹配,自然資源部極地考察辦公室和中國極地研究中心曾針對我國極地考察船需要關注的主要科學問題廣泛征求了相關領域科學家的建議。通過梳理科學家提出的11 個科學問題,發現其中有9 個與海冰、冰間湖有關,因此,需要“雪龍2”號船具備較強的冰區調查采樣能力。對于相應的功能需求而言,也就需要“雪龍2”號船配備月池系統以適應冰區科考調查的科學需求。圖1 所示為月池系統從主甲板向下垂直貫穿到船底(共5 層)的示意圖。

圖1 “雪龍2”號月池系統貫穿甲板示意圖Fig. 1 Illustration of moonpool system penetrating through decks in Xuelong 2
2.2 結構組成
“雪龍2”號極地考察船的月池系統由艙蓋系統、滑車系統、動力操控系統等3 個二級系統以及三級部件和四級模塊組成,如表2 所示。
圖2 所示為“雪龍2”號月池系統的主要結構圖。艙蓋系統主要位于月池井道的兩端,其中,頂蓋位于主甲板,底蓋位于船底;滑車系統的導軌分為固定導軌和活動導軌兩個部分,貫穿整個月池井道,升降滑車在導軌上往返移動;動力操控系統液壓泵站布置在主甲板上,為各活動部件提供液壓動力。本地操控臺位于液壓泵站旁,而遠程操控面板則位于操控室操控臺。

圖2 “雪龍2”號月池系統主要結構圖Fig. 2 Main structure diagram of moonpool system in Xuelong 2

表2 “雪龍2”號船月池系統的主要結構組成Table 2 Main structure composition of moonpool system in Xuelong 2
2.3 功能實現
目前,國際上所有含月池系統的船舶,其底蓋都未采用水密設計,航行過程中月池內水體與船外水體是連通的,月池井道內液面與海面相同,因此含這類月池的船舶在航行中會伴隨有月池內水體的復雜運動,在此過程中耗散船舶的運動能量,并且月池內水體的周期性漩渦運動還將導致船舶阻力與航行姿態發生同周期的變化[7]。
為提升船舶航行效率和穩定性,同時,避免極地冰區低溫對月池功能的影響,“雪龍2”號船的月池底蓋采用了水密設計,以將月池井道與船體外水體隔離,在非作業期間,關閉底蓋,抽空井道內的水體。頂蓋采用風雨密設計。滑車系統可以避免布放和回收設備時船舶搖擺導致儀器設備磕碰月池結構,確保了儀器設備沿預設軌道安全收放。導軌主要用于滑車的升降,與月池頂蓋干涉的部位采用活動導軌,待頂蓋開啟后與固定導軌對接,組成連續導軌,可確保滑車移動不受限制。其他部位采用固定導軌。動力操控系統采用液壓動力,月池蓋開啟與關閉、月池蓋插銷鎖緊與解鎖、活動導軌上下移動對接等動作都由液壓油缸執行,并采用可編程控制器控制系統對各動作進行控制。
2.4 月池操作流程
本文以CTD 設備的布放和回收為例,介紹月池操作的流程。
在開始CTD 投放作業前,首先將海水注入月池井道內,直至與海面齊平,平衡月池底蓋上下的水壓,以便開啟月池底蓋。然后,將CTD 移動至月池頂蓋上方,且正對滑車下方,以便兩者對接。其后,按如下步驟操作:CTD 鎧裝鋼纜穿過相應滑輪及防墜閂鎖頭,并與CTD 連接;打開滑車鎖架,滑車下移至CTD 導接頭上,將防墜閂鎖緊,CTD 與滑車建立剛性連接;CTD 絞車與月池系統的鋼絲繩直拉絞車建立聯動(鋼絲繩直拉絞車用于滑車升降),為保護CTD 鎧裝鋼纜,CTD絞車隨動;解鎖月池頂蓋插銷后,開啟月池頂蓋;解鎖月池底蓋插銷后,開啟月池底蓋;滑車與CTD 下移至活動導軌下端;活動導軌下移并與月池井道內固定導軌對接;滑車與CTD 通過固定軌道繼續下移至月池井道底部;解鎖防墜閂鎖頭,解除CTD 絞車與月池鋼絲繩直拉絞車之間的聯動;正常操作CTD 絞車作業。
回收過程與上述投放過程基本相反。具體步驟如下:
操作CTD 絞車至CTD 導接頭與月池底部的滑車對接,并鎖緊防墜閂;CTD 絞車與月池鋼絲繩直拉絞車建立聯動;提升滑車與CTD 至活動導軌頂端;提升活動導軌至限定位置;繼續提升滑車與CTD 至滑車鎖架上方;關閉滑車鎖架,使滑車與CTD 置于滑車鎖架上;關閉月池底蓋并鎖緊插銷;關閉月池頂蓋并鎖緊插銷;防墜閂解鎖,解除CTD 絞車與月池鋼絲繩直拉絞車之間的聯動;將CTD 置于月池頂蓋上,進行后續的CTD 取水等作業。
若接下來短期內沒有月池作業計劃,待月池底蓋關閉插銷鎖緊后,即可進行月池內海水排水、淡水清潔的操作,最后用蒸汽壓縮空氣吹除殘余水分,以防止結冰。
3 “雪龍2”號船月池系統設計要點
3.1 位置確定
“雪龍2”號船的月池位于舷側作業位置對應的船舯部位,主要基于如下考慮:1)傳統上通過舷側作業的方式在大洋及零星浮冰區域仍然具有反應速度快、表層水交換性好等優勢,需要保留此作業方式。因此,布放和回收相關科考調查設備(如CTD 等)一般在舷側和月池間切換。月池設置在與舷側作業對應位置,切換更為便捷;2)船體連續結構上設置一個井道尺寸為4.8 m×4.8 m(凈開口為3.2 m×3.2 m)的開孔,約占“雪龍2”號22%的船寬,對船體結構強度要求較高,位于船舯有利于船體結構強度延續;3)“雪龍2”號船在冰區破冰航行時部分碎冰在船體的擠壓作用下將浸沒于水下,隨水流劃過船底殼,與船底產生摩擦與碰撞[8]。船艏底部安裝下沉式紡錘型箱式龍骨,可將海冰導流向船底兩側,船底中間區域流冰較少,月池布置在中間位置設備更安全。
3.2 井道頂蓋和底蓋密性要求
1) 月池井道頂蓋。
“雪龍2”號月池系統井道頂蓋為風雨密。由于主甲板兼有科考調查物資臨時存儲的功能,為保證月池井道頂蓋關閉后月池科考作業區內人員、物資通行安全和便利,頂蓋采用埋入式安裝方式,關閉后與主甲板地面齊平。同時,頂蓋設計強度不低于主甲板其他部位,滿足了該艙室內整個甲板貨物堆放存儲的需求。頂蓋風雨密設計可確保月池車間內沖洗甲板、設備時,月池井道內保持干燥,這對于在極地冰區發揮月池的功能具有重要的意義。
2) 月池井道底蓋。
通常船舶或平臺的月池系統較少配備月池井道底蓋。但是,開敞的月池井道將增加船舶航行時的動力消耗,基于經濟性和節能的考慮,部分船舶會配備非水密底蓋。然而,極區環境具有較強的特殊性:一方面,若采用月池井道敞口的設計,破冰船破冰時產生的碎冰將會沿船底向后運動[8],到達月池井道底部開口處后,在沒有外力阻擋下將在月池井道內上升并積累,而且井道內浮在自由液面的冰還會嚴重影響科考調查設備的投放和回收作業。另一方面,若采用非水密月池底蓋設計,井道內海水將長期存在。極地冰區水溫較低(常臨近?2 ℃),海水易在月池內結冰,影響月池功能的發揮。同時,全船將多出約190 t 存在自由液面的“壓艙水”,對船舶的浮性、穩性均會產生影響。加拿大一艘北極破冰調查船由于其月池底部封蓋采用了非水密移門設計,在冰區使用中出現了較為嚴重的碎冰在月池中積累的現象,該船進入冰區后短時間內底部就凍結上了厚冰坨,使得月池功能無法正常發揮。
為避免海水在月池內結冰或海冰堆積,“雪龍2”號船的月池底蓋采用了水壓密形式,如圖3 所示。底蓋水壓密的保持與船舶的吃水有關。“雪龍2”號船的設計吃水為7.85 m,滿載吃水為8.3 m,對底蓋的密性提出了較高要求。同時,月池凈開口越小,單扇月池底蓋尺寸也會減小,而承受的總壓力越小,系統水密可靠性就越強。因此,“雪龍2”號船的月池開口設定為滿足基本使用需求的較小尺寸。

圖3 月池系統水密底蓋圖Fig. 3 Moonpool system watertight bottom cover
“雪龍2”號船破冰航行時,大量體積較大的碎冰將劃過或撞擊關閉鎖緊后的月池底蓋,底蓋將承受約8 m 的水壓作用,在航行海域底蓋還會受到涌浪升沉沖擊和砰擊載荷作用,因此,設計底蓋受壓時考慮了一定的冗余。最后,底蓋關閉鎖緊后按能夠承受12 m 的水壓(即0.12 MPa)的要求進行了設計,底蓋口外表面積為9.9 m2,底蓋上總負載為1 188 kN。此外,針對底蓋關閉過程,還需考慮底部水流和冰流對關閉裝置的頂升力和拍擊作用,且強烈的上涌沖擊力會導致底蓋結構受損和折斷液壓油缸。因此,在充分考慮上述因素的基礎上,“雪龍2”號船的月池底蓋的設計采用了沿單側鉸鏈轉動的方案,通過4 個大型液壓油缸進行啟閉。除啟閉液壓油缸外,閉合后的底蓋還可以通過12 個(除安裝鉸鏈一側外的3 個側面,每側4 個)液壓插銷鎖止。
“雪龍2”號船月池系統使用的鉸鏈、液壓油缸的材質其結構強度遠超內、外部載荷要求,可滿足極地冰區的使用需求。其中,閉合鉸鏈采用了AISI 630 H1150(H620)材質,屈服強度不低于725 MPa。經計算,閉合后的月池底蓋Von Mises 應力絕大部分區域低于20 MPa,僅在12 個插銷位置附近超過90 MPa(圖4),月池底蓋中央區域的變形超過1 mm(圖5)。為了確保破冰及冰區航行時的結構安全,“雪龍2”號船月池底蓋采用與船體一致的AH36 鋼材(屈服強度不低于355 MPa),結構強度設計不低于船體外板。

圖4 月池底蓋Mises 等效應力圖Fig. 4 External loading-Von Mises stress of bottom cover of moonpool

圖5 月池底蓋受力形變圖Fig. 5 External loading-displacements of bottom cover of moonpool
3.3 低溫環境除冰
極地氣候環境條件惡劣,冬季時間長、氣溫較低、海表長年被冰覆蓋。北極氣溫大都介于?43~?26 ℃之間,平均氣溫為?34 ℃;南極的氣候通常較同緯度的北極更冷,且南極海氣交換強烈,濕度大,相對濕度大都不低于95%,這種極端氣候極易在破冰船上形成覆冰[9-11]。同時,低溫將嚴重影響材料性能,加速橡膠密封圈的老化和鋼鐵斷裂韌性衰退。當冰在船舶或設備(例如液壓油缸、插銷)局部積累時,過大的重力會產生復雜的內應力,易造成結構部件損壞[12]。月池井道底蓋是否正常關閉、關閉是否到位、插銷是否鎖緊均由限位傳感器發出信號,若此類部件表面覆冰,可能得到錯誤或者相反的信號,嚴重影響操作人員的判斷,從而引發事故。
由于“雪龍2”號船的月池系統底蓋采用了水密設計,在正常情況下頂蓋、底蓋呈關閉狀態,月池井道內無水,而到達月池作業站點前,月池井道內會注水,待與水線齊平且內、外壓力平衡后底蓋才會開啟。在作業結束后,關閉底蓋并將月池井道內海水用泵抽到舷外,井道內經淡水沖洗后排出沖洗水,然后使用壓縮空氣和高壓蒸汽烘干吹除月池井道內殘留的小部分水體,以確保無殘留水漬。經過上述處理,液壓油缸、底蓋與船體接觸縫隙等活動關節處將不會凍結而影響后續使用。此外,“雪龍2”號船的月池系統水線以下主要活動部件處都預設有輔助電加熱裝置,若活動關節因存在少量水體凍結而影響使用時,提前開啟輔助電加熱裝置即可去除凍冰并恢復功能。
3.4 雙殼結構消波
“雪龍2”號船的月池井道深度為11.8 m,在絕對靜止狀態下,月池內的海水自由液面至月池頂蓋開口處的高度約有3.5~3.95 m。在氣旋的影響下,南極海域冰區涌浪通常可達3~4 m。如前文所述,在月池開口尺寸一定且涌浪升沉滿足一定的頻率的情況下,月池內的水體會發生劇烈振蕩,幅度遠比船體外圍的涌浪劇烈,其引發的“活塞”現象還會導致海水涌上主甲板。不僅如此,“活塞”和“晃蕩”現象還會對布放和回收的設備、月池結構本體造成沖擊,危害設備安全;同時,月池內水體的劇烈振蕩還會在月池所在的作業車間產生較大嘯叫聲,惡化現場作業環境。
如圖6 所示,“雪龍2”號船的月池井道內四壁采用雙殼結構進行消波處理,以減小海水振蕩沖擊載荷。月池井道的四壁雙殼結構間距為單邊0.8 m。雙殼結構外殼為密封鋼板,內殼為鏤空鋼板,兩層殼體內敷設海水管、淡水管、控制線管、液壓管線等。
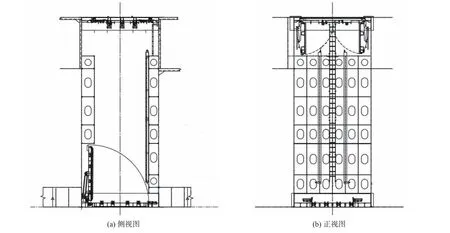
圖6 “雪龍2”號月池系統雙殼結構Fig. 6 Double-shell wave-reducing structure of Xuelong 2 moonpool system
3.5 滑車系統
為避免因船體搖晃而磕碰設備,“雪龍2”號月池系統在船艏一側設置了滑車導軌,攜帶設備的滑車可沿軌道安全布放回收。由于月池頂蓋為風雨密設計,軌道與月池頂蓋鄰近和接觸的部位無法形成連續結構,故通常的設計均會采用活動導軌和固定導軌相結合的形式。
南非S. A. Agulhas Ⅱ號極地考察船的月池頂蓋為雙扇上開式,頂蓋鉸鏈與固定導軌位置平行,活動導軌設在靠近固定導軌一側的月池頂蓋背面。其他固定導軌分為2 個部分:一部分位于月池井道內;另一部分位于開啟后的月池頂蓋上空。當月池頂蓋向上開啟到位后,位于月池頂蓋背面的活動導軌露出,并與另兩部分固定導軌對接形成連續的導軌結構。
“雪龍2”號船月池頂蓋則采用一種完全不同的雙扇下開式設計,且其鉸鏈與固定導軌位置垂直,導軌也分為2 個部分:一是井道內的固定導軌;二是井道上空的活動導軌。受限于主甲板所在層的凈空,滑車在活動導軌上的行程分為兩步:第1 步活動導軌不動,滑車下移至活動導軌底部;第2 步滑車不動,活動導軌下移并與固定導軌對接形成連續導軌結構后,滑車繼續下移。如所在層高足夠大,可設計更長的活動導軌且更簡便,即只要活動導軌下移并與固定導軌對接形成連續導軌結構后滑車就可繼續下移。
3.6 設備與滑車對接及主動、從動控制
“雪龍2”號船在利用月池系統進行科考作業時,調查設備頂端的導接裝置與滑車系統的鎖扣裝置連接,通過液壓控制油缸對連接進行鎖緊或解鎖(圖7)。

圖7 月池系統防墜閂鎖頭結構截面圖Fig. 7 Structure details of section of moonpool at latching head
在使用月池系統進行科考調查時(以CTD 作業為例),CTD 設備與月池收放絞車裝置連接在一起并處于鎖緊狀態,其作為一個整體在月池滑軌上移動,可保證CTD 設備在月池中的平穩布放和回收。由于月池上的滑車自重約1.5 t,加上CTD 設備的24 瓶海水樣品采集后(重約0.44 t)的總重較大,若滑車運行中所有重量都由CTD 設備的鎧裝纜承受,將影響CTD 的鋼纜使用壽命和數據通信,甚至出現鎧裝纜斷裂的嚴重事故。因此,在設計時,采用了月池收放系統絞車為主動力、CTD 絞車被動跟隨的控制方式,即在作業時月池絞車作為提升和下放的主動力,由絞車鋼纜承受主要受力,CTD 絞車通過恒張力控制模式跟隨絞車移動,其鎧裝纜只承受系統設定的張力。上述設計可有效保護布放和回收作業過程中CTD的鎧裝纜,保證CTD 的作業安全。
4 極地現場使用情況
2019 年12 月9 日~10 日,中國第36 次南極考察隊在南大洋宇航員海進行科考作業,調查作業站位(66°40′S,55°11′E)海域附近的海冰密集度約80%~95%(圖8),傳統的舷側CTD 布放和回收作業無法開展,而“雪龍2”號船在該海域3 次成功通過月池系統完成了作業測試(圖9)[13]。“雪龍2”號船的月池系統配備可以保證即使在10 成冰(海冰覆蓋率達100%)海域也可順利實現針對既定計劃站點的調查作業。

圖8 2019 年12 月9 日南大洋海域冰情圖Fig. 8 Ice chart of the Southern Ocean in Dec 9, 2019

圖9 “雪龍2”號成功在南極冰區進行月池測試Fig. 9 Xuelong 2 successfully conducted moonpool test in Antarctic
在此次南極現場使用測試過程中,經多次磨合測試,為冰區月池系統的應用及改進提高積累了一些經驗。月池井道內注入海水后,底蓋解鎖插銷,插銷完全解鎖后,再執行開蓋動作。每個動作的極限位置均有限位傳感器給出信號。同時,相應的插銷解鎖和鎖緊、底蓋啟閉是否到位、滑車進入水體后狀態、設備與滑車是否分離等狀態,都可實時傳輸給本地控制站、指揮中心遠程控制臺和船舶駕駛臺。指揮中心和駕駛臺可隨時掌握月池系統的運行狀態,為更準確地操船配合科考作業提供決策依據,從而進一步提高設備的使用安全性。
5 結 語
“雪龍2”號是我國第1 艘配備了月池系統的極地考察船,在借鑒國外極地考察船月池使用經驗的基礎上,結合自身多年極地現場調查的理解,合理設置了舷側和月池作業切換動線,創新使用了風雨密頂蓋、水壓密底蓋、特殊的軌道對接方案、烘干多余水分及活動關節加熱除冰的雙保險設計等,成功研制出了適合我國極地考察船的新方案。“雪龍2”號船在南極密集浮冰區成功應用月池系統,宣告了我國極地科考調查以往受限于海冰密度而不斷調整作業站點計劃的窘境一去不復返,標志著“雪龍2”號船形成了與其破冰能力相匹配的極地冰區科考作業能力,是我國在極地科考調查裝備領域獲得的技術飛躍。對于科考作業而言,月池系統將“雪龍2”號船破冰能力的增強所帶來的考察空間及時間拓展發揮到了極致,為后續我國在極地密集浮冰區的科考作業奠定了堅實的基礎,對極地考察船月池系統的設計和建造具有一定的借鑒意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
