微小型水下機器人斷電保護方法及艏向跟蹤性能研究
2021-10-27 13:44:36殷寶吉朱華倫唐文獻金志坤喻宇陽
彈箭與制導(dǎo)學(xué)報 2021年4期
關(guān)鍵詞:信號
殷寶吉,朱華倫,唐文獻,金志坤,喻宇陽
(1 江蘇科技大學(xué)機械工程學(xué)院,江蘇鎮(zhèn)江 212003;2 江蘇科技大學(xué)江蘇省船海機械先進制造及工藝重點實驗室,江蘇鎮(zhèn)江 212003)
0 引言
海洋資源日益得到世界各國的重視,水下打撈、海底管道檢測、水下養(yǎng)殖等都是在水下進行[1],水下機器人是完成這些水下工作必不可少的工具。水下機器人工作環(huán)境復(fù)雜,不可預(yù)測,其可靠性是保障任務(wù)完成的必要條件[2-3],因此必須加強機器人的安全監(jiān)測[4]。
針對直接關(guān)閉水下機器人電源容易造成下位機主控制器系統(tǒng)崩潰問題,文獻[5]采用硬件電路監(jiān)測斷電信息。文中設(shè)計一種軟件關(guān)機方法,在上、下位機中分別添加關(guān)機監(jiān)測子線程,達到下位機關(guān)機狀態(tài)監(jiān)測的目的。針對下位機主控制器與推進器共用同一電源時[6],推進器強電流容易對主控制器控制信號造成干擾的問題,文中為主控制器和推進器分別設(shè)置獨立電源。此種情況下,當采用常規(guī)級聯(lián)電源控制電路為推進器供電時[7],下位機關(guān)閉后,推進器突然達到最高速,針對此問題,設(shè)計一種推進器電源控制電路,以解決前述問題。
為分析水下機器人艏向控制性能,設(shè)計水下機器人艏向PID控制器,實現(xiàn)水下機器人艏向定向控制,通過改變正弦信號、方波信號、三角波信號等3種艏向目標跟蹤信號的頻率,研究水下機器人實際艏向角度信號與目標跟蹤信號之間的幅值比-頻率特性以及相位差-頻率特性。
1 關(guān)機監(jiān)控方法概述
水下機器人由于其電子艙是處于密封狀態(tài)的,選擇直接斷開總電源進行關(guān)機,會對主控制器中的軟硬件造成很大傷害,且容易導(dǎo)致下位機系統(tǒng)崩潰。為解決上述問題,采用軟件方式進行下位機關(guān)機,即,上位機向下位機發(fā)送關(guān)機命令,監(jiān)測下位機關(guān)機過程,待下位機完全關(guān)閉后,再斷開下位機電源。下位機關(guān)機監(jiān)測程序由上位機監(jiān)測子線程和下位機監(jiān)測子線程兩部分構(gòu)成,具體流程如圖1所示。
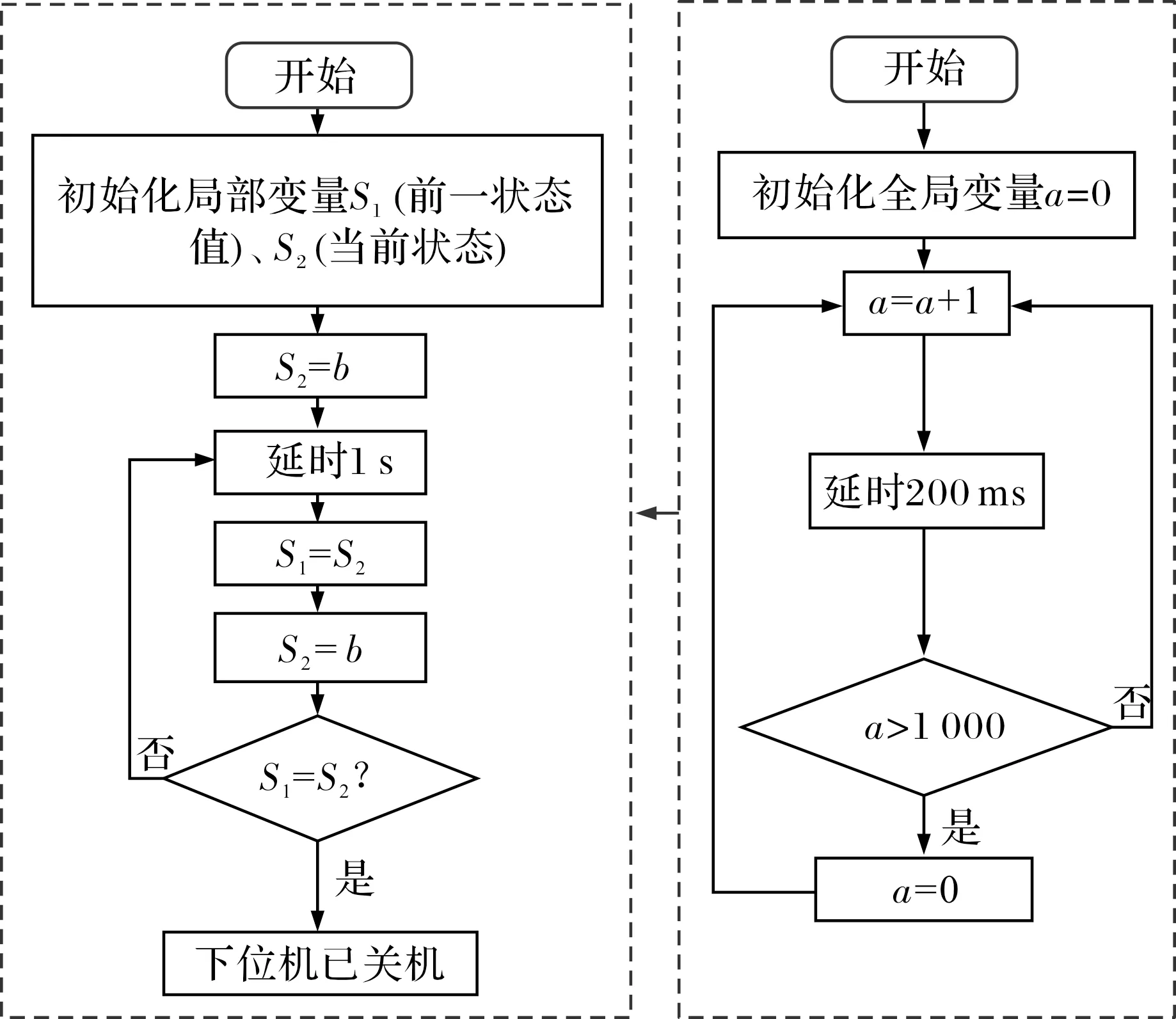
圖1 關(guān)機監(jiān)測程序流程圖
2 推進器電源控制電路
采用軟件方法關(guān)閉下位機系統(tǒng)時,下位機系統(tǒng)關(guān)機后,主控電源繼電器關(guān)閉前,推進器出現(xiàn)突然達到最高轉(zhuǎn)速的現(xiàn)象,直至繼電器關(guān)閉,這將縮短推進器使用壽命,甚至燒毀推進器驅(qū)動器。
為此設(shè)計一種推進器電源控制電路,使得在下位機系統(tǒng)關(guān)閉的同時或之前,斷開推進器電源,以防止推進器突然達到最高轉(zhuǎn)速。推進器電源控制電路如圖2(a)所示,為進行對比,常規(guī)級聯(lián)電路如圖2(b)所示。
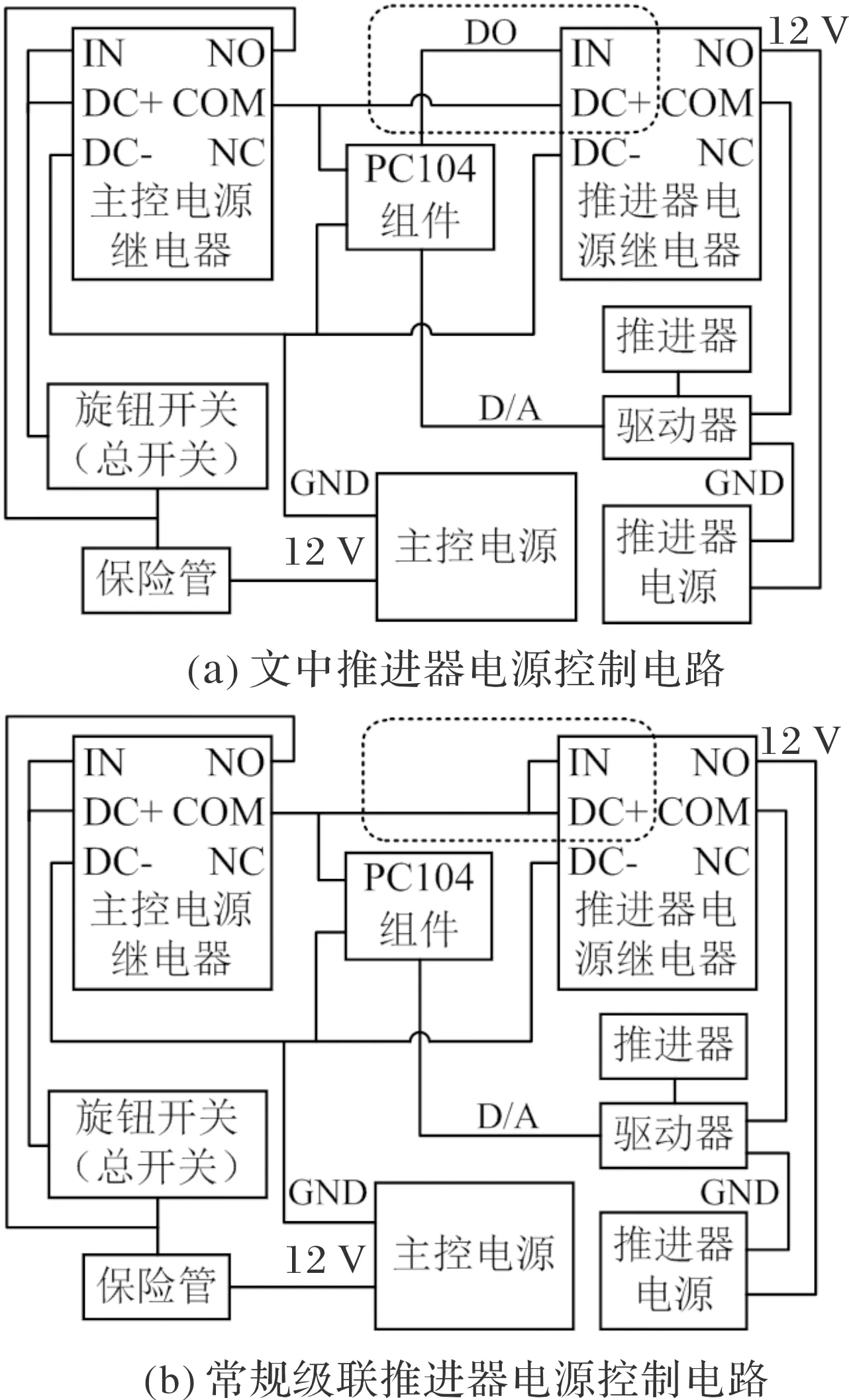
圖2 推進器電源控制電路圖
如圖2中虛線框所示,從圖2(b)中可以看出,常規(guī)級聯(lián)推進器電源控制電路中繼電器的控制信號輸入端直接連接12 V電壓,在打開旋鈕開關(guān)后,主控電源繼電器工作,進而驅(qū)動推進器電源繼電器工作,此時,繼電器的控制信號輸入端是不可控的,即只能通過關(guān)閉總電源來關(guān)閉推進器電源繼電器;從圖2(a)中,可以看出,推進器電源控制電路中,推進器電源繼電器控制信號輸入端與PC104組件的數(shù)字輸出(DO)引腳連接,當DO為高電平時,繼電器閉合,當DO為低電平時,繼電器斷開,從而使得繼電器的斷開和閉合可由下位機程序控制。
3 艏向PID控制器
為分析水下機器人艏向控制性能,設(shè)計水下機器人艏向PID控制器[8-10],實現(xiàn)對水下機器人的艏向閉環(huán)控制,并以此研究艏向跟蹤性能。水下機器人閉環(huán)控制回路如圖3所示。

圖3 PID控制水下機器人艏向閉環(huán)控制回路圖
圖3中,艏向閉環(huán)控制方程為:
(1)
通過水池實驗,確定PID參數(shù)為:KP=0.167,KI=0.01,KD=0.1。
4 實驗驗證
4.1 水下機器人實驗系統(tǒng)
進行陸上和水池實驗,實驗裝置如圖4所示。
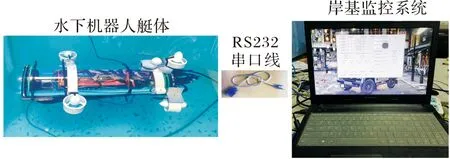
圖4 水下機器人系統(tǒng)
水下機器人總長550 mm,質(zhì)量約11 kg,航速1 kn。岸基監(jiān)控系統(tǒng)與水下機器人艇體之間通過RS232串口線連接。
4.2 關(guān)機監(jiān)控方法實驗驗證
下位機關(guān)機實驗是將電子艙拿出密封艙進行的,下位機連接顯示屏,下位機上電開機,通過顯示屏觀察到程序正常運行,最后運行上位機程序,待程序初始化后,上位機監(jiān)控界面中下位機健康狀態(tài)欄顯示綠色,從上位機界面點擊按鈕發(fā)送關(guān)機指令,通過下位機連接的顯示屏看到,下位機正在執(zhí)行關(guān)機程序,關(guān)機完成后,此時上位機控界面中下位機健康狀態(tài)欄顯示藍色,從而實現(xiàn)對下位機關(guān)機的監(jiān)控。該實驗驗證了文中關(guān)機監(jiān)控方法的有效性。
4.3 推進器電源控制電路實驗驗證
下位機上電開機,然后運行上位機程序,待程序初始化后,通過上位機運行界面點擊推進器電源控制按鈕,此時按鈕上推進器狀態(tài)顯示“開”,同時聽到繼電器吸合聲和推進器上電初始化提示聲音,說明推進器已成功上電,發(fā)送推進器控制電壓,檢測推進器是否正常運行。實驗證明,推進器運行正常,通過發(fā)送推進器控制電壓讓推進器停轉(zhuǎn),再次點擊推進器電源控制按鈕,此時按鈕上位推進器狀態(tài)顯示“關(guān)”,再次發(fā)送推進器控制電壓,推進器不再運行,說明推進器已斷電。然后上位機發(fā)送關(guān)機命令至下位機,下位機系統(tǒng)關(guān)機過程中以及關(guān)機完成后,推進器都沒有轉(zhuǎn)動,驗證了推進器電源控制電路的有效性。
一般而言,水下機器人的艏向控制過程可分為艏向改變時水下機器人由當前艏向轉(zhuǎn)動至預(yù)設(shè)艏向的轉(zhuǎn)向階段和在艏向穩(wěn)定后消除穩(wěn)態(tài)誤差,抵抗外界擾動的保持階段兩部分[11-12]。水下機器人艏向PID控制器實驗分為定艏、艏向角度跟蹤兩部分,前者驗證PID控制器的有效性;后者驗證水下機器人艏向跟蹤性能。
4.3.1 定艏實驗
定艏運動主要將水下機器人定在不同角度,從而驗證文中PID控制器的控制效果。水下機器人期望艏向角設(shè)定在90°,180°,270°,艏向角響應(yīng)曲線以及對應(yīng)推進器控制電壓值分別如圖5~圖7所示。
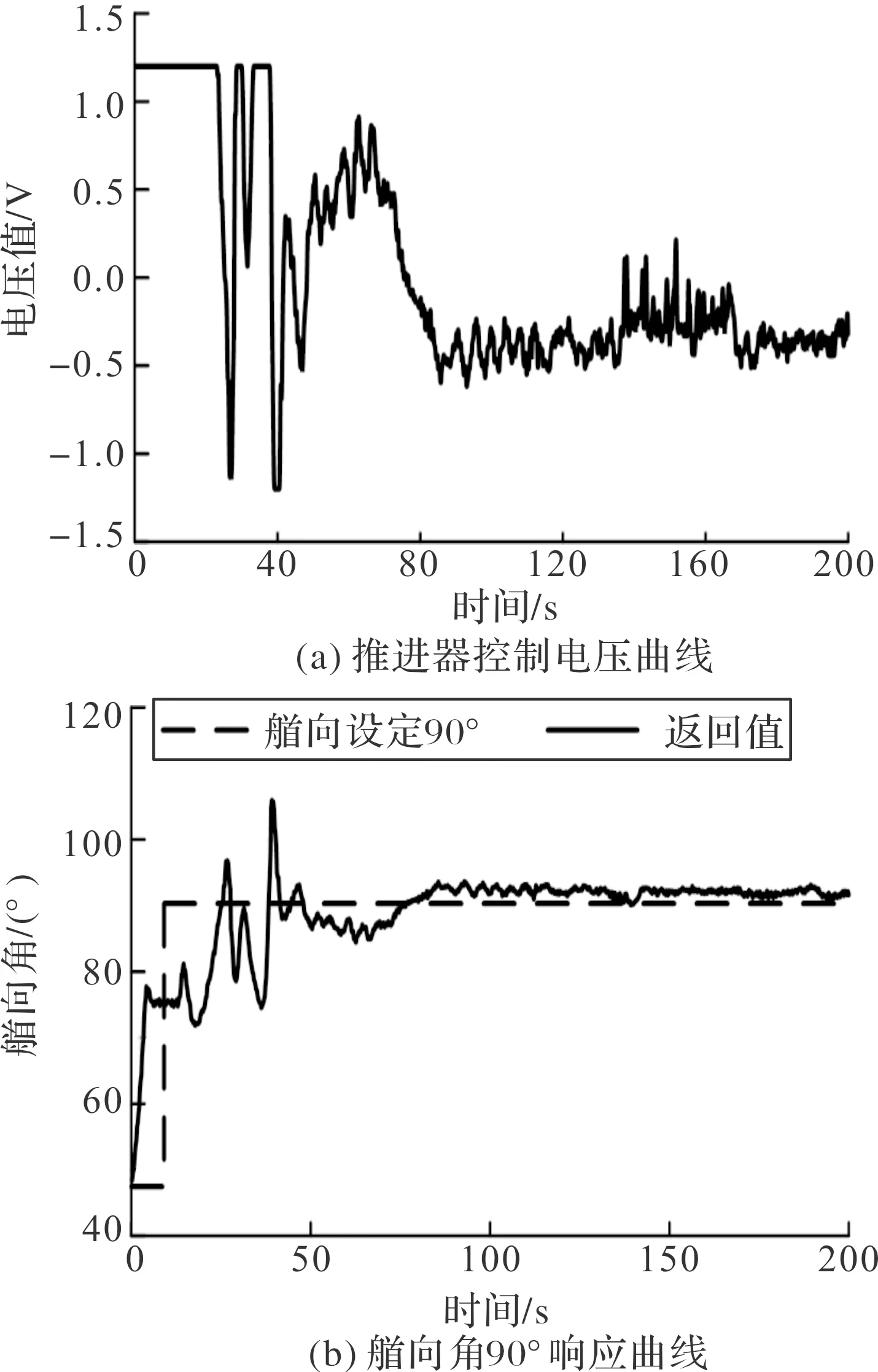
圖5 艏向角90°返回值及控制電壓值
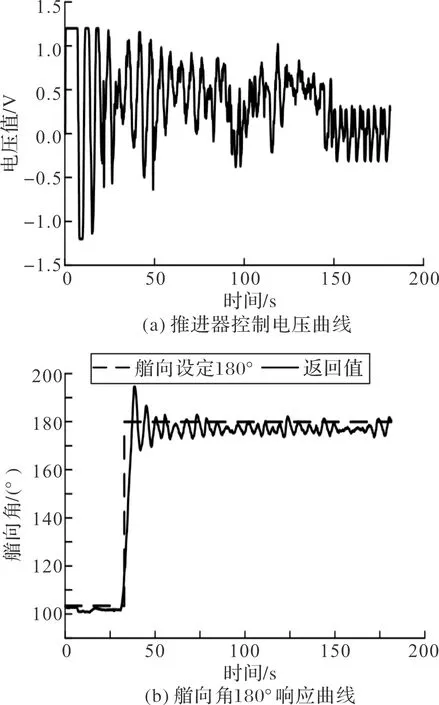
圖6 艏向角180°返回值及控制電壓值
從以上3個圖可以看出,水下機器人能夠快速響應(yīng)并跟隨期望艏向角運動,由于受傳感器固有誤差以及地磁影響,穩(wěn)定后的各個響應(yīng)角度其誤差均在正負5°以內(nèi),實驗結(jié)果表明所設(shè)計控制器能夠?qū)崿F(xiàn)艏向控制,基本達到預(yù)期效果。
4.3.2 艏向角度跟蹤實驗
選用正弦信號、方波信號、三角波信號等3種常見的周期信號進行艏向角度跟蹤,輸入信號周期為90 s,80 s,70 s,60 s,50 s,40 s,30 s,20 s,10 s,信號幅值為180°,以信號周期為30 s,即頻率為0.03 Hz為例,其實際艏向角度信號及目標跟蹤信號如圖8所示。
如圖8所示,水下機器人實際艏向角度軌跡與目標角度軌跡基本一致,幅值基本相等,相位略有滯后。通過改變周期信號的頻率來研究水下機器人實際艏向角度信號與目標跟蹤信號之間的幅值比-頻率特性以及相位差-頻率特性,其結(jié)果如圖9~圖11所示。
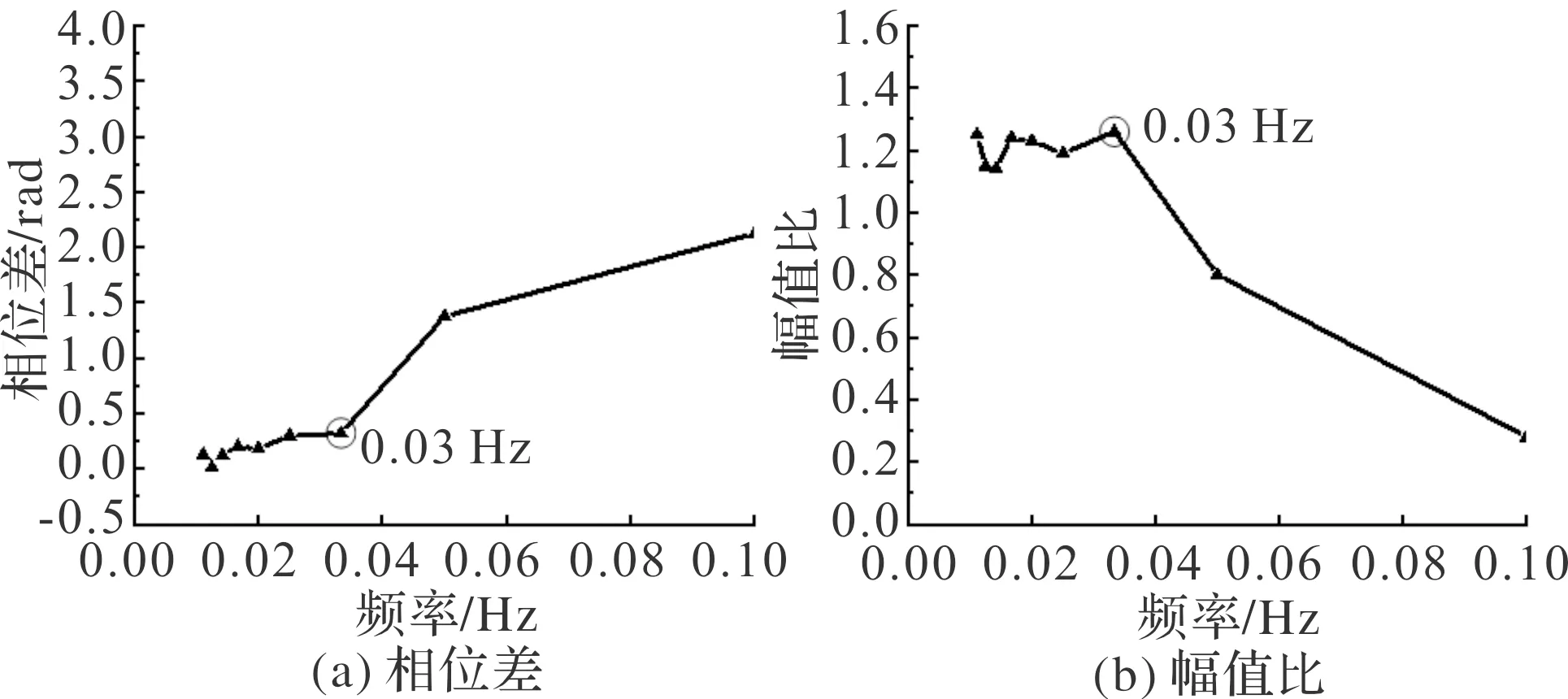
圖11 三角波信號相位差與幅值比曲線圖
從圖9可以看出,當頻率較小時,隨著頻率的增加,相位差、幅值比變化幅度較小,但當頻率大于0.03 Hz時,相位差快速增加,幅值比與幅值快速衰減。由此可知,頻率小于0.03 Hz時水下機器人實際輸出可以跟蹤上期望輸出,當頻率大于0.03 Hz時水下機器人實際輸出難以跟蹤上期望輸出。圖10、圖11所示結(jié)果與圖9相一致。由此可知,水下機器人艏向跟蹤截止頻率為0.03 Hz。
5 結(jié)束語
圍繞水下機器人實驗問題展開研究,設(shè)計了一種下位機關(guān)機監(jiān)控方法,實現(xiàn)了對下位機關(guān)機的監(jiān)控,避免了直接關(guān)閉水下機器人電源容易造成下位機主控制器崩潰的問題;設(shè)計了一種推進器電源控制電路,實現(xiàn)了對推進器供電的控制,解決了下位機關(guān)機后,推進器突然達到最高速的問題;設(shè)計了一種PID控制器,實現(xiàn)了對水下機器人的艏向控制。水下機器人艏向定位與跟蹤的水池實驗結(jié)果表明,艏向定位穩(wěn)態(tài)誤差為±5°,對于幅值為90°的正弦信號、方波信號、三角波信號的艏向期望軌跡,當期望軌跡頻率小于0.03 Hz時,水下機器人實際輸出可以跟蹤上期望輸出,當頻率大于0.03 Hz時,水下機器人實際輸出難以跟蹤上期望輸出。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
