測(cè)量機(jī)器人的關(guān)鍵技術(shù)
2021-10-27 01:00:42戴集成趙英豪趙玏洋王月琴
測(cè)繪學(xué)報(bào) 2021年9期
閆 利,陳 宇,謝 洪,戴集成,趙英豪,胡 嘯,李 瑤,趙玏洋,王月琴
1. 武漢大學(xué)測(cè)繪學(xué)院,湖北 武漢 430079; 2. 武漢市自然資源和規(guī)劃信息中心,湖北 武漢 430014
智能化測(cè)繪一直是測(cè)繪領(lǐng)域追求的技術(shù)目標(biāo),測(cè)繪數(shù)據(jù)獲取與處理技術(shù)的自主化、實(shí)時(shí)化水平總體上決定了測(cè)繪技術(shù)解決問(wèn)題的智能化水平和能力。前瞻智能時(shí)代孕育的科技巨變,智能技術(shù)將改變目前信息化測(cè)繪/數(shù)字化測(cè)繪“以人為中心”的方式,建立以自主化、實(shí)時(shí)化、泛在化、主流化為技術(shù)特征的“數(shù)據(jù)-信息-知識(shí)-智慧”的主動(dòng)感知、實(shí)時(shí)認(rèn)知和泛在智能決策技術(shù)體系,然而現(xiàn)在測(cè)繪數(shù)據(jù)獲取和處理模式基本上是“人-機(jī)”協(xié)同、事后處理,無(wú)法滿(mǎn)足智能化測(cè)繪階段時(shí)空信息獲取與應(yīng)用需求。
近20年,移動(dòng)測(cè)量技術(shù)走向成熟,特別是無(wú)人機(jī)測(cè)量、車(chē)載移動(dòng)測(cè)量及背包移動(dòng)測(cè)量,更是在泛在測(cè)量和位置服務(wù)的強(qiáng)勢(shì)需求背景下,其技術(shù)和產(chǎn)品得到持續(xù)發(fā)展,在一定程度上解決了動(dòng)態(tài)測(cè)量技術(shù)問(wèn)題。從控制方式方面分析,目前移動(dòng)測(cè)量依賴(lài)于人的控制或者預(yù)先編制程序控制,因此,屬于程序控制的動(dòng)態(tài)測(cè)量系統(tǒng),缺乏滿(mǎn)足未知測(cè)量環(huán)境和未知測(cè)量對(duì)象的自主適應(yīng)能力,也就是說(shuō)缺乏“智能”。
當(dāng)今,智能科技正在深刻影響著人類(lèi)生產(chǎn)和生活方式的變革,掀起了一場(chǎng)工程科技及智能設(shè)備制造的革命,期望為機(jī)器賦予人類(lèi)感覺(jué)和思考能力,那么智能科技為移動(dòng)測(cè)量帶來(lái)的發(fā)展機(jī)遇是什么?“Gartner Top 10 Strategic Technology Trends 2019”報(bào)告將“自主設(shè)備”作為影響未來(lái)發(fā)展的第一項(xiàng)技術(shù)趨勢(shì)預(yù)測(cè),無(wú)人自主系統(tǒng)也將是移動(dòng)測(cè)量的發(fā)展方向,將“類(lèi)人智能”賦予移動(dòng)測(cè)量技術(shù)體系,利用機(jī)器代替人并完成測(cè)量行為,無(wú)疑是智能化測(cè)繪的一個(gè)愿景目標(biāo),鑒于此認(rèn)識(shí),本文探究“測(cè)量機(jī)器人”的關(guān)鍵技術(shù)與發(fā)展方向。
1 測(cè)量機(jī)器人的內(nèi)涵與組成
1.1 內(nèi) 涵
測(cè)量機(jī)器人是指利用移動(dòng)載體實(shí)現(xiàn)實(shí)時(shí)、自主目標(biāo)測(cè)量的智能裝備。具體講,就是采用移動(dòng)載體搭載多種傳感器,按照任務(wù)定義,依賴(lài)自主導(dǎo)航,自主探測(cè),自主獲取并重建目標(biāo)場(chǎng)景,自主實(shí)時(shí)完成場(chǎng)景分析,以及在線獲取目標(biāo)的位置信息。
按照載體或用途,可將測(cè)量機(jī)器人分為多種類(lèi)型。從需求角度分析,飛行測(cè)量機(jī)器人、地面測(cè)量機(jī)器人、地下測(cè)量機(jī)器人、水下測(cè)量機(jī)器人則更具有現(xiàn)實(shí)需求。
1.2 組 成
測(cè)量機(jī)器人系統(tǒng)一般由硬件層、感知層、決策層、服務(wù)層與運(yùn)動(dòng)控制系統(tǒng)5部分組成,其系統(tǒng)結(jié)構(gòu)如圖1所示。硬件層包括移動(dòng)平臺(tái)、傳感器模塊、通信模塊與計(jì)算模塊,主要負(fù)責(zé)實(shí)現(xiàn)測(cè)量機(jī)器人的移動(dòng)、數(shù)據(jù)采集與通信功能。感知層負(fù)責(zé)對(duì)傳感器模塊采集的各類(lèi)數(shù)據(jù)進(jìn)行分析,實(shí)現(xiàn)機(jī)器人的自主定位并建立對(duì)周?chē)h(huán)境的認(rèn)知,繼而輔助決策層進(jìn)行任務(wù)制定與相應(yīng)的路徑規(guī)劃。決策層依據(jù)感知層的輸出信息,結(jié)合實(shí)際測(cè)量任務(wù)需求進(jìn)行作業(yè)規(guī)劃,同時(shí)向運(yùn)動(dòng)控制系統(tǒng)傳輸指令。運(yùn)動(dòng)控制層在獲取決策層提供的指令后,計(jì)算機(jī)器人的運(yùn)動(dòng)控制量,實(shí)現(xiàn)機(jī)器人精確穩(wěn)定的運(yùn)動(dòng)。服務(wù)層根據(jù)既定測(cè)量任務(wù)的需求,通過(guò)綜合處理硬件層、感知層和決策層提供的數(shù)據(jù)及分析結(jié)果,提供目標(biāo)跟蹤、場(chǎng)景制圖和變化檢測(cè)等測(cè)量服務(wù)。
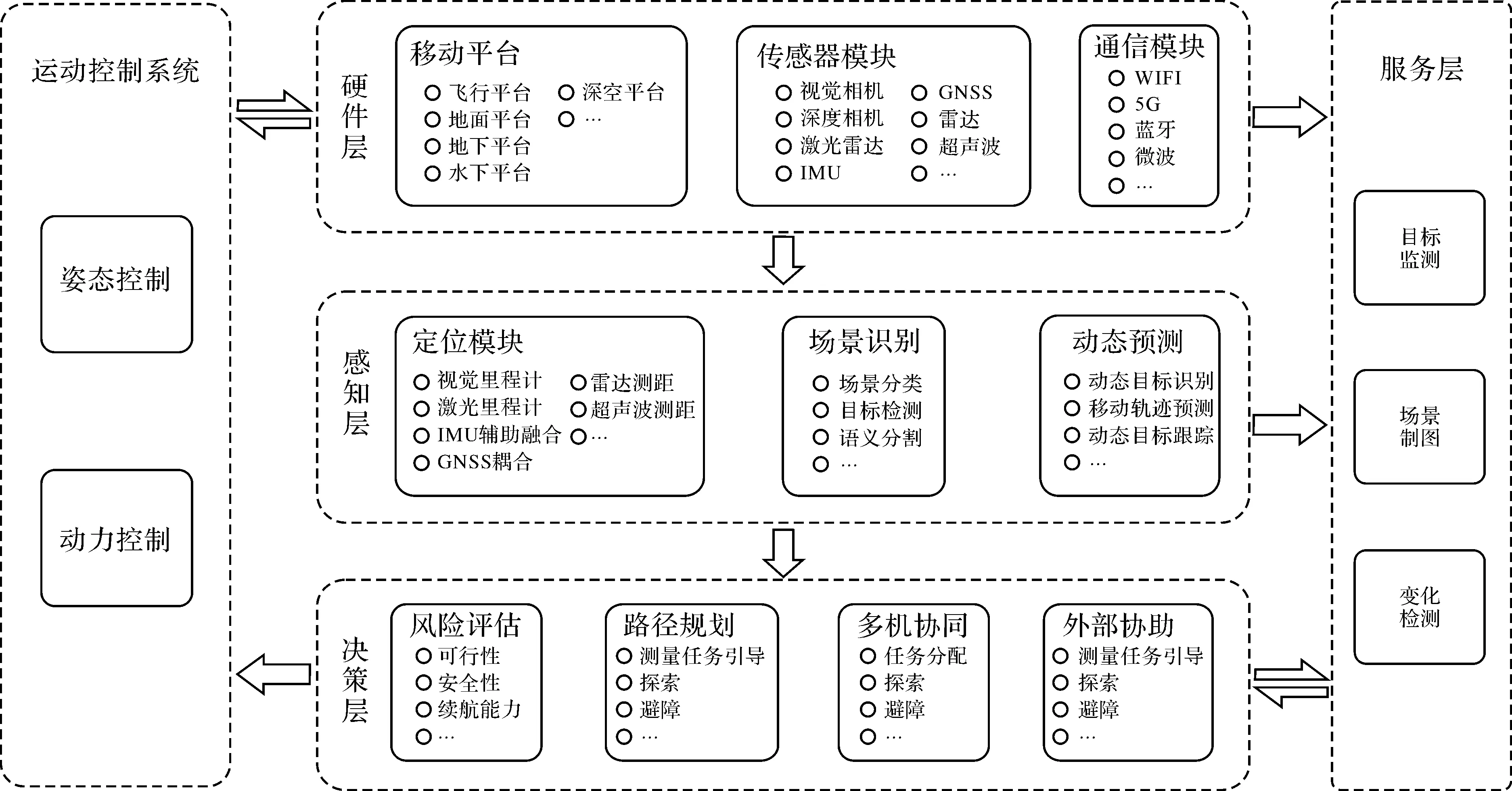
圖1 測(cè)量機(jī)器人組成Fig.1 The composition of surveying robot
(1) 硬件層。移動(dòng)平臺(tái)是測(cè)量機(jī)器人的硬件基礎(chǔ),主要負(fù)責(zé)搭載傳感器、計(jì)算平臺(tái)及通信模塊等設(shè)備進(jìn)行移動(dòng)。根據(jù)運(yùn)動(dòng)方式的不同,可以將其主要分為飛行平臺(tái)、地面移動(dòng)平臺(tái)及水下移動(dòng)平臺(tái)3大類(lèi)。其中,飛行平臺(tái)按照飛行方式的不同,延伸出了單旋翼、多旋翼、撲翼和固定翼等類(lèi)型;地面移動(dòng)平臺(tái)按照行進(jìn)方式的不同也出現(xiàn)了輪式、足式及履帶式等類(lèi)型;水下移動(dòng)平臺(tái)按照驅(qū)動(dòng)方式的不同,可以分為推進(jìn)式與滑翔式。不同平臺(tái)運(yùn)動(dòng)類(lèi)型的擴(kuò)展和延伸,為測(cè)量機(jī)器人在多樣化任務(wù)需求和復(fù)雜工作環(huán)境下的順利作業(yè)提供了堅(jiān)實(shí)的硬件支撐。
測(cè)量機(jī)器人通過(guò)移動(dòng)平臺(tái)搭載的傳感器采集周?chē)h(huán)境信息。測(cè)量平臺(tái)的體積、載重和功率規(guī)格是有限制的,考慮到工作場(chǎng)景和精度、分辨率等預(yù)定義的測(cè)量任務(wù)需求,需要找到最適合的傳感器和載體平臺(tái)組合。測(cè)量機(jī)器人可以使用的傳感器包括視覺(jué)相機(jī)、深度相機(jī)、激光雷達(dá)、GNSS、IMU、雷達(dá)和超聲探測(cè)儀等,各類(lèi)傳感器的優(yōu)劣勢(shì)見(jiàn)表1。
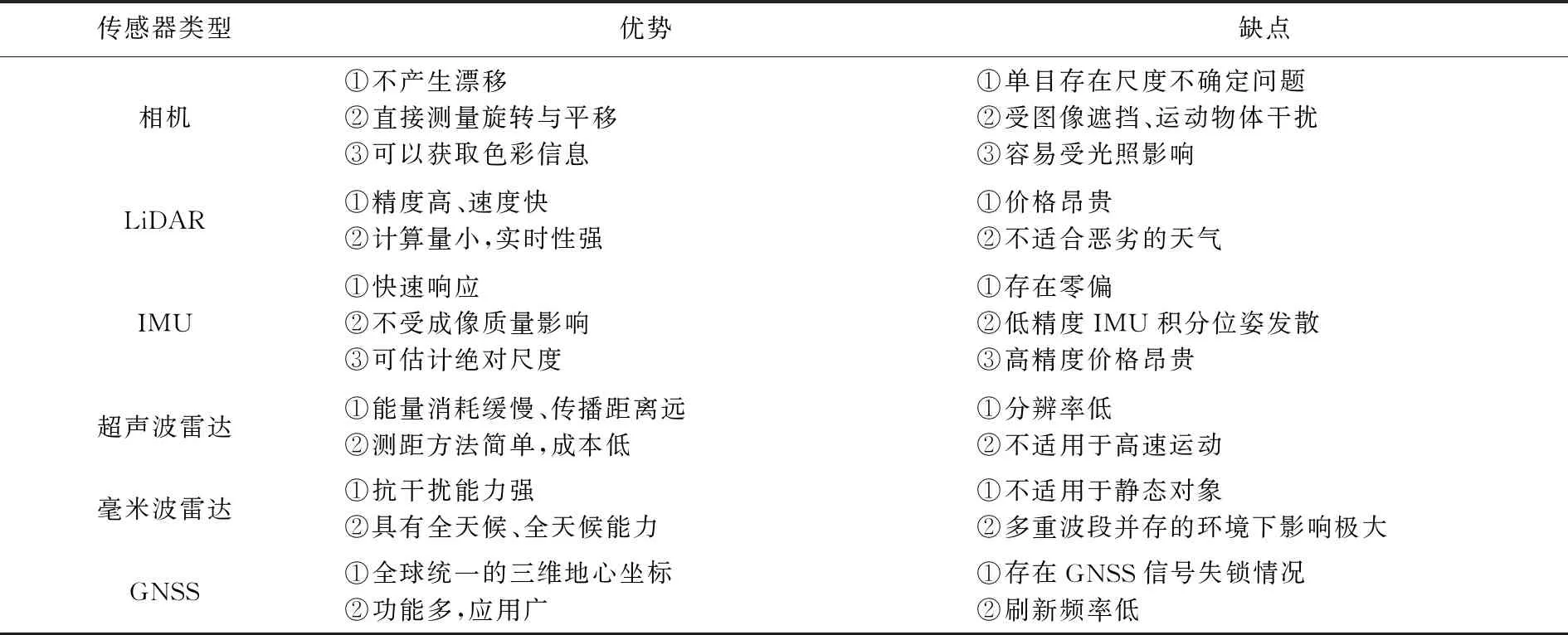
表1 各傳感器優(yōu)缺點(diǎn)比較Tab.1 The comparison of advantages and disadvantages of various sensors
通信系統(tǒng)負(fù)責(zé)測(cè)量機(jī)器人與地面站、遙控器及其他測(cè)量機(jī)器人之間的通信,包括傳輸控制指令、傳感器數(shù)據(jù)及地圖信息等。測(cè)量機(jī)器人的通信功能可以通過(guò)Wi-Fi、5G、藍(lán)牙、微波等技術(shù)手段實(shí)現(xiàn)。
(2) 感知層。感知層是測(cè)量機(jī)器人理解外部環(huán)境信息,掌握局部目標(biāo)運(yùn)動(dòng)態(tài)勢(shì)的功能模塊,在獲取多源傳感器數(shù)據(jù)的基礎(chǔ)上,通過(guò)對(duì)數(shù)據(jù)的分析、認(rèn)知與表達(dá),輔助決策層進(jìn)行任務(wù)制定與相應(yīng)的路徑規(guī)劃。根據(jù)職能的不同,感知層主要分為定位、識(shí)別與預(yù)測(cè)3個(gè)模塊,其中定位模塊的主要任務(wù)是借助傳感器獲取的信息,計(jì)算得出測(cè)量機(jī)器人在當(dāng)前環(huán)境中的精確位置與運(yùn)動(dòng)狀態(tài)。定位模塊中通常使用多傳感器融合技術(shù)保證定位結(jié)果的穩(wěn)定、準(zhǔn)確和實(shí)時(shí)性;場(chǎng)景識(shí)別模塊根據(jù)多傳感器獲取的場(chǎng)景信息,進(jìn)行場(chǎng)景分類(lèi)、目標(biāo)檢測(cè)與語(yǔ)義分割,使測(cè)量機(jī)器人建立對(duì)周?chē)h(huán)境的認(rèn)知與理解。預(yù)測(cè)模塊在定位與識(shí)別模塊的基礎(chǔ)上,通過(guò)分析場(chǎng)景中的動(dòng)態(tài)目標(biāo),預(yù)測(cè)其未來(lái)多種可能的運(yùn)動(dòng)狀態(tài),為后續(xù)的決策規(guī)劃提供可靠依據(jù)。
(3) 決策層。決策層的主要任務(wù)是根據(jù)感知層獲取的場(chǎng)景信息,結(jié)合實(shí)際的測(cè)量任務(wù),對(duì)任務(wù)進(jìn)行可行性及風(fēng)險(xiǎn)性評(píng)估,決定下一步的作業(yè)模式并規(guī)劃出最優(yōu)的作業(yè)路線。按照職能不同,該層可以分為風(fēng)險(xiǎn)評(píng)估、路徑規(guī)劃、多機(jī)協(xié)同及外部協(xié)助4個(gè)模塊。風(fēng)險(xiǎn)評(píng)估模塊的主要任務(wù)是在顧及測(cè)量平臺(tái)續(xù)航能力及軟硬件運(yùn)行情況等狀態(tài)指標(biāo)的前提下,依據(jù)周?chē)鷪?chǎng)景信息,對(duì)任務(wù)的可行性及風(fēng)險(xiǎn)性進(jìn)行評(píng)估,判斷是否繼續(xù)執(zhí)行任務(wù)或是否申請(qǐng)外部協(xié)助。路徑規(guī)劃模塊是在感知層獲取的場(chǎng)景信息的基礎(chǔ)上,結(jié)合測(cè)量任務(wù)的目標(biāo),根據(jù)移動(dòng)平臺(tái)的動(dòng)力學(xué)模型規(guī)劃出一條安全、光滑及符合動(dòng)力學(xué)約束的最優(yōu)作業(yè)路徑并交由運(yùn)動(dòng)控制系統(tǒng)執(zhí)行。多機(jī)協(xié)同模塊的主要任務(wù)則是在集群聯(lián)合作業(yè)的情況下,按照效率最大化的原則,對(duì)任務(wù)進(jìn)行劃分,并交由多個(gè)集群成員同時(shí)執(zhí)行。而外部協(xié)助模塊則是在復(fù)雜或極端情況威脅到測(cè)量任務(wù)與機(jī)器人安全性,決策層難以做出合理安全的決策時(shí),申請(qǐng)外部人為協(xié)助,以避免任務(wù)失敗或出現(xiàn)嚴(yán)重的作業(yè)事故。
(4) 服務(wù)層。服務(wù)層是測(cè)量機(jī)器人的測(cè)量功能最終實(shí)現(xiàn)與執(zhí)行的部分,針對(duì)特定應(yīng)用場(chǎng)景需求而形成對(duì)應(yīng)的解決方案。其負(fù)責(zé)接收前3層的信息輸入,基于測(cè)量任務(wù)的不同執(zhí)行對(duì)應(yīng)的數(shù)據(jù)處理算法,并根據(jù)任務(wù)的需求在必要時(shí)對(duì)決策層發(fā)出指令,保證測(cè)量任務(wù)的順利執(zhí)行。本文根據(jù)測(cè)量機(jī)器人應(yīng)用場(chǎng)景與測(cè)量任務(wù)的需求將應(yīng)用層的組成分為3大模塊:場(chǎng)景制圖、變化檢測(cè)和目標(biāo)監(jiān)測(cè)。
其中,場(chǎng)景制圖模塊基于傳感器采集的信息,通過(guò)相應(yīng)算法對(duì)目標(biāo)場(chǎng)景進(jìn)行重建,并能夠根據(jù)任務(wù)的需求對(duì)場(chǎng)景的關(guān)鍵目標(biāo)進(jìn)行重點(diǎn)識(shí)別與測(cè)量;變化檢測(cè)模塊能夠?qū)⒛繕?biāo)對(duì)象的當(dāng)前觀測(cè)結(jié)果與歷史數(shù)據(jù)進(jìn)行對(duì)比,發(fā)現(xiàn)其中變化的部分,并測(cè)量與估計(jì)變化的程度;目標(biāo)監(jiān)測(cè)模塊可以根據(jù)任務(wù)需求對(duì)場(chǎng)景中的特定目標(biāo)進(jìn)行搜索,指揮測(cè)量機(jī)器人跟隨目標(biāo)對(duì)象并進(jìn)行持續(xù)觀測(cè)。
(5) 控制系統(tǒng)。機(jī)器人運(yùn)動(dòng)控制系統(tǒng)根據(jù)決策層提供的行動(dòng)指令,通過(guò)姿態(tài)控制器和控制律設(shè)計(jì)模塊解算出合適的舵機(jī)和電機(jī)控制量,轉(zhuǎn)換成具體的PWM信號(hào)輸出給硬件層。
在機(jī)器人運(yùn)動(dòng)控制系統(tǒng)中,姿態(tài)控制器用于增加機(jī)器人運(yùn)動(dòng)體軸方向的阻尼。機(jī)器人運(yùn)動(dòng)控制系統(tǒng)根據(jù)加速度計(jì)、陀螺儀、磁強(qiáng)計(jì)解算出的姿態(tài)角作為反饋,用預(yù)先設(shè)計(jì)好的控制律進(jìn)行運(yùn)算,計(jì)算出各個(gè)舵面和電機(jī)控制量后發(fā)送到舵機(jī)和電機(jī),由舵機(jī)和電機(jī)驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)。其中,舵機(jī)包括控制機(jī)器人運(yùn)動(dòng)姿態(tài)的舵機(jī)和任務(wù)舵機(jī)(拍照、開(kāi)關(guān)等操作),電機(jī)驅(qū)動(dòng)動(dòng)力系統(tǒng)提供推力和拉力。機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的具體流程如圖2所示。

圖2 機(jī)器人運(yùn)動(dòng)控制系統(tǒng)Fig.2 Robot motion control system
2 難題與關(guān)鍵技術(shù)
2.1 難 題
測(cè)量機(jī)器人屬于光機(jī)電一體化智能復(fù)雜無(wú)人自主系統(tǒng),是一個(gè)涉及測(cè)繪、導(dǎo)航與控制、電子、機(jī)械、高性能計(jì)算及人工智能的多學(xué)科交叉前沿研究領(lǐng)域。主要技術(shù)難題包括:
(1) 自主路徑規(guī)劃難題。主要面臨如下問(wèn)題:①算法適應(yīng)性不強(qiáng)。當(dāng)前很多路徑規(guī)劃算法只能在某些場(chǎng)景內(nèi)取得很好的效果,當(dāng)場(chǎng)景發(fā)生較大變化時(shí),不能保證規(guī)劃質(zhì)量。②動(dòng)態(tài)避障能力有限。目前的避障算法大多針對(duì)的是靜態(tài)或低動(dòng)態(tài)障礙物,對(duì)于擁有高動(dòng)態(tài)障礙物或者多動(dòng)態(tài)障礙物的工作場(chǎng)景并不能滿(mǎn)足實(shí)時(shí)避障需求。③規(guī)劃效率有待進(jìn)一步提升。當(dāng)前的路徑規(guī)劃算法大多是用于簡(jiǎn)單的移動(dòng)任務(wù),當(dāng)面向復(fù)雜測(cè)量任務(wù)時(shí),難以確保規(guī)劃的有效性、實(shí)時(shí)性以及最優(yōu)性。
(2) 智能場(chǎng)景感知理論難題。主要面臨如下問(wèn)題:①檢測(cè)能力有限。場(chǎng)景理解算法對(duì)受到遮擋的物體或小物體的檢測(cè)能力較弱,機(jī)器人的識(shí)別范圍因此受限。②樣本依賴(lài)程度高。基于深度學(xué)習(xí)的場(chǎng)景感知通常需要標(biāo)注大量的樣本,人工成本高,并且有時(shí)會(huì)遇到樣本不平衡問(wèn)題,而弱監(jiān)督及無(wú)監(jiān)督算法發(fā)展較為滯后。③動(dòng)態(tài)學(xué)習(xí)能力不足。大多數(shù)感知算法都依賴(lài)于初始訓(xùn)練階段生成的模型,缺少根據(jù)測(cè)量過(guò)程中獲取的數(shù)據(jù)持續(xù)學(xué)習(xí)調(diào)整模型的能力。
(3) 實(shí)時(shí)自適應(yīng)多機(jī)協(xié)同難題。目前主要面臨以下兩個(gè)問(wèn)題:未知環(huán)境下的任務(wù)動(dòng)態(tài)分配問(wèn)題和面向測(cè)量任務(wù)的多機(jī)路徑規(guī)劃問(wèn)題。這個(gè)問(wèn)題涉及多個(gè)機(jī)器人自由度迭加所產(chǎn)生的高維組合空間優(yōu)化、機(jī)器人靜態(tài)和動(dòng)態(tài)約束等技術(shù)難點(diǎn),導(dǎo)致難以進(jìn)行實(shí)時(shí)、合理的多機(jī)協(xié)同規(guī)劃。
(4) 復(fù)雜智能處理的實(shí)時(shí)計(jì)算難題。無(wú)人測(cè)量系統(tǒng)往往存在載荷能力小,計(jì)算資源極其有限,而涉及的多源傳感器數(shù)據(jù)的智能處理,均是當(dāng)前發(fā)展階段正在努力攻克的技術(shù)難題,那么在有限計(jì)算資源情況下,實(shí)現(xiàn)高可靠性的智能數(shù)據(jù)處理與信息提取,必須突破實(shí)時(shí)計(jì)算困難。
2.2 關(guān)鍵技術(shù)
測(cè)量機(jī)器人的關(guān)鍵技術(shù)主要有定位與建圖、場(chǎng)景識(shí)別、路徑規(guī)劃和多機(jī)協(xié)同等。其中,定位與建圖技術(shù)用于確定機(jī)器人自身位姿,并建立周?chē)h(huán)境的三維地圖;場(chǎng)景識(shí)別技術(shù)負(fù)責(zé)為機(jī)器人提供場(chǎng)景感知與理解能力;路徑規(guī)劃技術(shù)旨在為機(jī)器人規(guī)劃安全高效的移動(dòng)測(cè)量路線;多機(jī)協(xié)同技術(shù)能夠協(xié)調(diào)多臺(tái)機(jī)器人共同作業(yè),完成測(cè)量任務(wù)。
2.2.1 定位與建圖
GNSS技術(shù)通過(guò)無(wú)線電信號(hào)進(jìn)行定位,能夠確定全局坐標(biāo)系下移動(dòng)平臺(tái)的位置和速度,在理想情況下定位精度可以達(dá)到厘米級(jí),被廣泛地應(yīng)用于機(jī)器人領(lǐng)域[1]。但是由于測(cè)量機(jī)器人工作范圍存在大量GNSS拒止環(huán)境,因此為了實(shí)現(xiàn)測(cè)量機(jī)器人在這些環(huán)境下的穩(wěn)定定位,需要使用同步定位與建圖(simultaneous localization and mapping,SLAM)技術(shù)。SLAM技術(shù)在構(gòu)建環(huán)境地圖的同時(shí)完成對(duì)機(jī)器人的定位,統(tǒng)一了定位與建圖問(wèn)題。
經(jīng)典的SLAM技術(shù)框架如圖3所示,其系統(tǒng)主要由前端與后端組成,前端的任務(wù)是通過(guò)對(duì)傳感器數(shù)據(jù)處理,建立數(shù)據(jù)關(guān)聯(lián),估計(jì)數(shù)據(jù)幀間的相對(duì)位姿變化,完成機(jī)器人的運(yùn)動(dòng)及局部地圖的重建。而后端通過(guò)接收前端輸送的關(guān)聯(lián)數(shù)據(jù),對(duì)其進(jìn)行優(yōu)化,估計(jì)整個(gè)系統(tǒng)的狀態(tài),并向前端提供反饋,以進(jìn)行回環(huán)檢測(cè)和驗(yàn)證,最終得到全局一致的軌跡和地圖。根據(jù)使用的主要傳感器不同,SLAM系統(tǒng)可以分為以下3種:基于激光雷達(dá)的SLAM、基于視覺(jué)的SLAM和多傳感器融合SLAM。見(jiàn)表2。
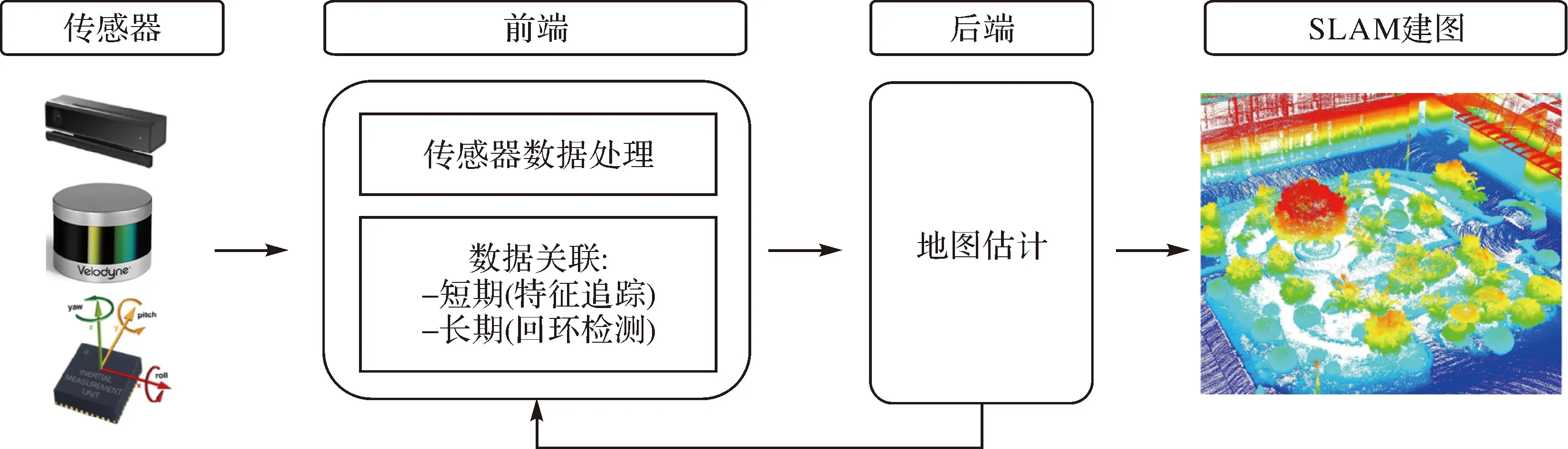
圖3 SLAM算法框架Fig.3 The framework of SLAM algorithm
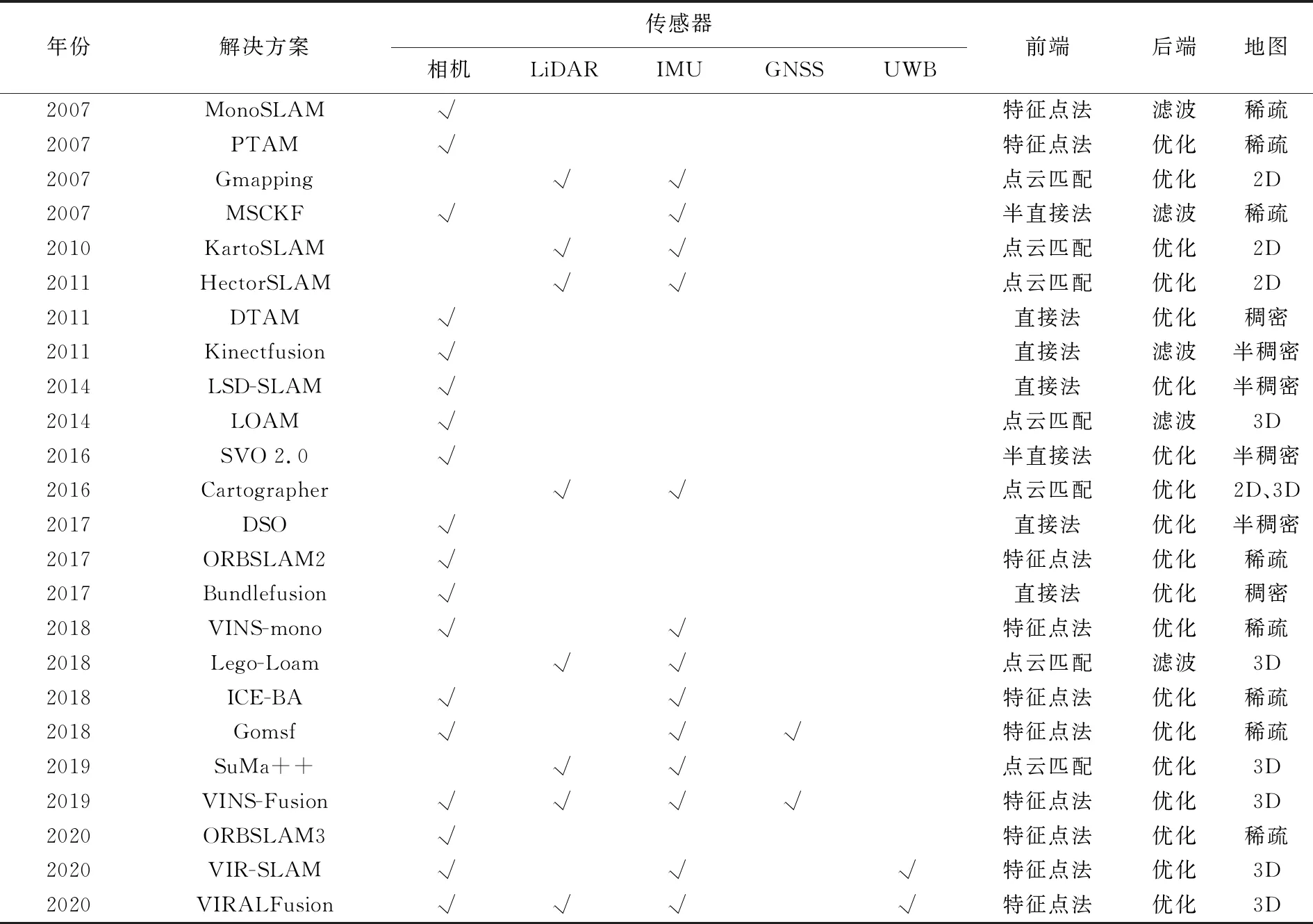
表2 常見(jiàn)SLAM算法總結(jié)Tab.2 The summary of popular SLAM algorithms
基于激光的SLAM技術(shù)通過(guò)對(duì)不同時(shí)刻的點(diǎn)云進(jìn)行匹配與優(yōu)化,計(jì)算激光雷達(dá)相對(duì)運(yùn)動(dòng)的距離和姿態(tài),實(shí)現(xiàn)對(duì)機(jī)器人的定位和建圖[2]。激光SLAM研究在理論和工程上都比較成熟,具有制圖精度高、穩(wěn)定性強(qiáng)、不受外界光照影響等優(yōu)點(diǎn)。基于視覺(jué)的SLAM技術(shù)主要是通過(guò)對(duì)連續(xù)的圖像數(shù)據(jù)進(jìn)行位姿估計(jì)和后端優(yōu)化,完成定位并建立滿(mǎn)足任務(wù)要求的地圖。相較于激光雷達(dá),攝像頭的成本低、探測(cè)距離遠(yuǎn),此外視覺(jué)傳感器采集的圖像信息比激光雷達(dá)掃描的信息豐富,可以提取目標(biāo)紋理信息,有利于后期處理。但是,無(wú)論從適用場(chǎng)景、累計(jì)誤差還是定位和建圖精度等問(wèn)題,激光和視覺(jué)傳感器的單獨(dú)使用都存在其局限性。基于多傳感器融合的SLAM算法,利用卡爾曼濾波或圖優(yōu)化等技術(shù)對(duì)不同傳感器的數(shù)據(jù)進(jìn)行結(jié)合,實(shí)現(xiàn)多傳感器之間的優(yōu)勢(shì)互補(bǔ)。常見(jiàn)的融合算法可以分為松耦合和緊耦合兩大類(lèi)。松耦合是指各傳感器分別進(jìn)行自身估計(jì),然后對(duì)其位姿估計(jì)結(jié)果融合。相較于松耦合算法,緊耦合將各傳感器的狀態(tài)合并,共同構(gòu)建觀測(cè)和運(yùn)動(dòng)模型,消除了直接在位姿層面融合造成的信息損失,可以實(shí)現(xiàn)更高的定位和建圖精度。因此,基于緊耦合的融合算法是目前多傳感器SLAM研究的主流方向。
此外,隨著深度學(xué)習(xí)技術(shù)的發(fā)展,其在特征提取、動(dòng)態(tài)物體識(shí)別、觀測(cè)值相似度計(jì)算等方面展現(xiàn)出的優(yōu)勢(shì)開(kāi)始在SLAM研究領(lǐng)域受到重視。將深度學(xué)習(xí)技術(shù)應(yīng)用于SLAM里程計(jì)、閉環(huán)檢測(cè)或語(yǔ)義建圖中的一個(gè)或多個(gè)環(huán)節(jié),提高系統(tǒng)的準(zhǔn)確率、計(jì)算效率及穩(wěn)健性,已成為定位與制圖技術(shù)的一大發(fā)展方向。
2.2.2 場(chǎng)景理解
場(chǎng)景理解是對(duì)場(chǎng)景進(jìn)行認(rèn)知和推斷的過(guò)程,是測(cè)量機(jī)器人可以自主完成測(cè)量任務(wù)的必要基礎(chǔ)。如圖4所示,在所有場(chǎng)景理解任務(wù)中最常見(jiàn)的3類(lèi)任務(wù)是場(chǎng)景分類(lèi)、目標(biāo)檢測(cè)與語(yǔ)義分割。其中,場(chǎng)景分類(lèi)負(fù)責(zé)判斷機(jī)器人所在場(chǎng)景的類(lèi)別,例如室內(nèi)或室外環(huán)境,人工或自然環(huán)境,繼而輔助定位模塊切換不同的模式。目標(biāo)檢測(cè)負(fù)責(zé)識(shí)別場(chǎng)景中的關(guān)鍵對(duì)象,例如在電力巡線時(shí)識(shí)別電力設(shè)施,在隧道測(cè)量中識(shí)別裂隙等。語(yǔ)義分割負(fù)責(zé)依照不同目標(biāo)區(qū)域類(lèi)別對(duì)整個(gè)場(chǎng)景進(jìn)行劃分和標(biāo)注,例如在土地調(diào)查中進(jìn)行不同土地利用類(lèi)型的劃分。
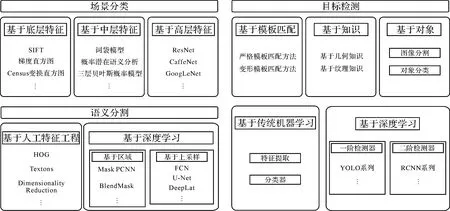
圖4 場(chǎng)景理解分類(lèi)Fig.4 The architecture of scenario understanding
在場(chǎng)景分類(lèi)領(lǐng)域,依據(jù)分類(lèi)過(guò)程使用的不同特征,分類(lèi)方法主要分為以下3類(lèi):基于底層特征的方法、基于中層特征的方法、基于高層特征的方法。基于底層特征的方法通常采用底層視覺(jué)屬性特征形成的向量來(lái)描述圖像,包括SIFT算法、梯度直方圖、Census變換直方圖等;基于中層特征的方法采用的是統(tǒng)計(jì)特征,介于底層特征與高級(jí)語(yǔ)義特征之間,通過(guò)對(duì)底層特征進(jìn)行統(tǒng)計(jì)與分析得到,常用的中層特征有詞袋模型、概率潛在語(yǔ)義分析和三層貝葉斯概率模型等;基于高層特征的方法通常基于深度學(xué)習(xí)框架,通過(guò)卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行場(chǎng)景分類(lèi),比較常見(jiàn)的深度學(xué)習(xí)框架有ResNet、CaffeNet和GoogLeNet等,這些經(jīng)典的框架通常需要大量的樣本訓(xùn)練網(wǎng)絡(luò)參數(shù),建立場(chǎng)景分類(lèi)模型,達(dá)到分類(lèi)的目的。
在目標(biāo)檢測(cè)領(lǐng)域,傳統(tǒng)的檢測(cè)方法主要分為以下4類(lèi):基于模板匹配的方法、基于知識(shí)的方法、基于對(duì)象的方法和基于傳統(tǒng)機(jī)器學(xué)習(xí)的方法。基于模板匹配的方法通過(guò)人工標(biāo)注或者樣本學(xué)習(xí)的方式生成用于檢測(cè)目標(biāo)的模板,然后利用相似性測(cè)度判斷目標(biāo)與模板的相似性程度進(jìn)行目標(biāo)檢測(cè)。根據(jù)采用的模板類(lèi)型不同,該類(lèi)方法又可以細(xì)分為嚴(yán)格模板匹配方法與變形模板匹配方法。基于知識(shí)的方法將目標(biāo)的幾何信息和上下文信息轉(zhuǎn)換為形狀、幾何、空間關(guān)系及其他類(lèi)型的規(guī)則用于檢測(cè)目標(biāo)。基于對(duì)象的方法主要包含分割和分類(lèi)兩個(gè)過(guò)程,首先根據(jù)人工設(shè)計(jì)準(zhǔn)則將數(shù)據(jù)分割成多個(gè)同質(zhì)區(qū)域,然后通過(guò)分類(lèi)方法,根據(jù)每個(gè)區(qū)域的特征確定包含目標(biāo)的所屬類(lèi)別。基于傳統(tǒng)機(jī)器學(xué)習(xí)的方法主要包括特征提取,特征融合與降維,分類(lèi)器分類(lèi)等過(guò)程,通過(guò)訓(xùn)練樣本數(shù)據(jù)自動(dòng)建立目標(biāo)檢測(cè)模型。基于深度神經(jīng)網(wǎng)絡(luò)的算法主要分為兩大類(lèi):二階檢測(cè)器與一階檢測(cè)器。二階檢測(cè)器首先生成一系列可能包含物體的候選框,然后再對(duì)每個(gè)候選框進(jìn)行分類(lèi);一階檢測(cè)器在沒(méi)有中間級(jí)的情況下同時(shí)生成目標(biāo)的所在區(qū)域和類(lèi)別信息。通常由于二階檢測(cè)器結(jié)構(gòu)相比于一階檢測(cè)器更加復(fù)雜,其檢測(cè)精度更高但是計(jì)算速度較慢。
在語(yǔ)義分割領(lǐng)域,傳統(tǒng)的語(yǔ)義分割方法主要依賴(lài)于人工特征工程,常見(jiàn)的流程為首先將圖像分割為圖塊或超像素,然后計(jì)算分割結(jié)果的特征,輸入如隨機(jī)森林、支持向量機(jī)等分類(lèi)器中,預(yù)測(cè)中心像素的分類(lèi)概率或每個(gè)像素的分類(lèi)概率。基于深度學(xué)習(xí)的語(yǔ)義分割方法主要可以分為基于區(qū)域的語(yǔ)義分割方法和基于上采樣的語(yǔ)義分割方法。基于區(qū)域的方法首先從圖像中提取自由形態(tài)區(qū)域并描述它們,然后對(duì)這些提取的區(qū)域進(jìn)行分類(lèi)。在測(cè)試時(shí),每個(gè)像素的預(yù)測(cè)值由包含該像素得分最高區(qū)域的預(yù)測(cè)值確定。基于上采樣的方法通過(guò)設(shè)計(jì)一個(gè)上采樣層把CNN網(wǎng)絡(luò)經(jīng)過(guò)卷積層和池化層的輸出上采樣到原圖的大小,從而得到像素級(jí)的分類(lèi)結(jié)果。常見(jiàn)的上采樣算法有雙線性插值法、反卷積法和反池化法等。此外,針對(duì)單個(gè)像素的預(yù)測(cè)噪聲,研究者們通常使用條件隨機(jī)場(chǎng)等方式進(jìn)行平滑以提高精度。
2.2.3 路徑規(guī)劃
路徑規(guī)劃是測(cè)量機(jī)器人自主作業(yè)過(guò)程中非常重要的一環(huán),其主要任務(wù)是根據(jù)測(cè)量任務(wù)需求,在靜態(tài)或動(dòng)態(tài)的測(cè)量區(qū)域內(nèi)基于距離、能耗及安全性等指標(biāo)尋找到一條符合動(dòng)力學(xué)約束且無(wú)碰撞的最優(yōu)或次優(yōu)路線,以確保機(jī)器人能夠安全的從起始位置到達(dá)目標(biāo)位置[3]。根據(jù)對(duì)環(huán)境先驗(yàn)知識(shí)獲取程度的不同,路徑規(guī)劃主要分為全局路徑規(guī)劃以及局部路徑規(guī)劃[4]兩類(lèi)。全局路徑規(guī)劃是指在測(cè)量區(qū)域環(huán)境信息保持不變且完全已知的情況下,預(yù)先規(guī)劃出一條滿(mǎn)足測(cè)量任務(wù)需求的最優(yōu)路徑。由于其對(duì)先驗(yàn)知識(shí)的依賴(lài),難以在未知環(huán)境以及動(dòng)態(tài)環(huán)境中工作。而局部路徑規(guī)劃不依賴(lài)于場(chǎng)景的先驗(yàn)信息,面向的是環(huán)境信息完全未知或者部分已知的測(cè)量場(chǎng)景,其主要借助傳感器獲取的局部環(huán)境信息并結(jié)合一定的探索策略進(jìn)行路徑規(guī)劃,因此其適用范圍更廣。通常情況下,為了能夠適應(yīng)各種測(cè)量環(huán)境,測(cè)量機(jī)器人會(huì)采用全局規(guī)劃和局部規(guī)劃相結(jié)合的方式進(jìn)行作業(yè),通過(guò)全局規(guī)劃算法確定大致的測(cè)量路線,同時(shí)采用局部路徑規(guī)劃算法對(duì)路徑進(jìn)行風(fēng)險(xiǎn)規(guī)避和優(yōu)化提升。
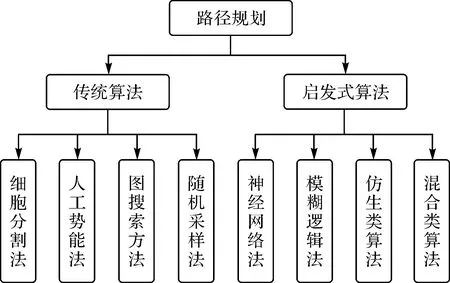
圖5 測(cè)量機(jī)器人路徑規(guī)劃分類(lèi)Fig.5 The classification of surveying robot path planning algorithms
近幾十年來(lái),很多研究人員和學(xué)者對(duì)路徑規(guī)劃算法進(jìn)行了深入研究,并提出了一系列優(yōu)秀的路徑規(guī)劃算法,按照原理的不同可以將各種算法大致分為傳統(tǒng)算法及啟發(fā)式算法兩大類(lèi),如圖6所示。下面簡(jiǎn)要闡述幾種典型算法。
(1) 傳統(tǒng)算法。在人工智能技術(shù)發(fā)展以前,傳統(tǒng)算法一直主導(dǎo)著機(jī)器人路徑規(guī)劃領(lǐng)域,其中典型的算法主要有以下幾類(lèi):①細(xì)胞分割法。細(xì)胞分割法將機(jī)器人的搜索空間劃分為不重疊的網(wǎng)格,通過(guò)不斷遍歷相鄰網(wǎng)格并對(duì)包含障礙物的網(wǎng)格進(jìn)行分割,最終搜索到一條從起始點(diǎn)到目標(biāo)點(diǎn)的無(wú)碰撞路徑。②人工勢(shì)場(chǎng)法。其基本思想是利用目標(biāo)和障礙物信息構(gòu)建一個(gè)人工勢(shì)場(chǎng),通過(guò)勢(shì)差產(chǎn)生的力引導(dǎo)機(jī)器人安全的向目標(biāo)點(diǎn)運(yùn)動(dòng)。③基于圖搜索方法。其主要思想是將機(jī)器人的工作空間分解為規(guī)則的網(wǎng)格單元并采用特定的擴(kuò)展策略對(duì)不包含障礙物的網(wǎng)格進(jìn)行擴(kuò)展,最終搜索得到一條無(wú)碰撞的路徑。④基于采樣的算法。該方法通過(guò)隨機(jī)采樣技術(shù)對(duì)狀態(tài)空間進(jìn)行采樣,通過(guò)對(duì)采樣點(diǎn)的搜索擴(kuò)展實(shí)現(xiàn)路徑規(guī)劃。目前主要分為PRM和RRT兩大類(lèi)。
(2) 啟發(fā)式算法。雖然傳統(tǒng)方法得到深入的發(fā)展并進(jìn)行了廣泛的應(yīng)用,但是始終存在如路徑最優(yōu)性無(wú)法保證、容易陷入局部最小值和時(shí)間成本高等問(wèn)題。為了解決這些問(wèn)題,研究人員基于人工智能技術(shù)提出了啟發(fā)式路徑規(guī)劃算法。
根據(jù)啟發(fā)式規(guī)劃算法的原理,可以將其分為以下幾類(lèi):①神經(jīng)網(wǎng)絡(luò)類(lèi)算法。該類(lèi)算法利用深度學(xué)習(xí)技術(shù),通過(guò)大量數(shù)據(jù)樣本訓(xùn)練得到的規(guī)劃模型,根據(jù)獲取的環(huán)境信息生成行進(jìn)路線。②模糊邏輯類(lèi)算法。模糊邏輯通過(guò)模擬人腦根據(jù)經(jīng)驗(yàn)總結(jié)實(shí)行模糊綜合判斷的能力,解決機(jī)器人在移動(dòng)過(guò)程中遇到的不確定性干擾。③自然啟發(fā)類(lèi)算法。該類(lèi)算法主要是受生物行為啟發(fā)而提出的仿生類(lèi)算法,主要有遺傳算法、粒子群優(yōu)化算法、蟻群算法等。④混合類(lèi)算法。該類(lèi)算法通過(guò)算法融合,彌補(bǔ)了單一算法的局限性,提高了路徑規(guī)劃算法的穩(wěn)健性。
2.2.4 多機(jī)協(xié)同
機(jī)器人多機(jī)協(xié)同是通過(guò)集群控制系統(tǒng)和集群智能系統(tǒng)協(xié)調(diào)控制多機(jī)器人運(yùn)動(dòng),完成多機(jī)器人協(xié)同感知決策的技術(shù)。相較于單一機(jī)器人,多機(jī)器人協(xié)同技術(shù)可以提升機(jī)器人系統(tǒng)的作業(yè)效率和任務(wù)執(zhí)行能力,以及拓展機(jī)器人系統(tǒng)的應(yīng)用范圍。集群機(jī)器人可攜帶多種類(lèi)的傳感器,傳感器之間能夠?qū)δ繕?biāo)進(jìn)行全方位、多角度檢測(cè),相互配合彌補(bǔ)探測(cè)盲區(qū),提高感知范圍和精度;同時(shí),在大地測(cè)量、氣象觀測(cè)以及搶險(xiǎn)救災(zāi)、森林滅火等領(lǐng)域,多機(jī)器人攜帶分布式載荷可以完成單機(jī)器人無(wú)法完成的大規(guī)模任務(wù)。
通常,機(jī)器人多機(jī)協(xié)同系統(tǒng)的技術(shù)框架由3個(gè)部分組成:數(shù)據(jù)獲取層、控制層與決策層。數(shù)據(jù)獲取層通過(guò)機(jī)載傳感器和集群的協(xié)作對(duì)任務(wù)區(qū)域進(jìn)行探測(cè)。傳感器獲取與所需任務(wù)有關(guān)的原始數(shù)據(jù),并將數(shù)據(jù)傳輸?shù)接?jì)算模塊。控制層利用集群協(xié)同編隊(duì)控制技術(shù)對(duì)機(jī)器人運(yùn)動(dòng)路線進(jìn)行規(guī)劃控制;利用通信及組網(wǎng)技術(shù)保障機(jī)器人機(jī)組之間的信息交互,從而實(shí)現(xiàn)機(jī)器人集群的協(xié)同導(dǎo)航。多機(jī)器人控制層包括兩個(gè)子階段:感知階段和規(guī)劃階段。感知階段融合多傳感器數(shù)據(jù),通常使用數(shù)據(jù)挖掘或數(shù)據(jù)處理算法來(lái)實(shí)現(xiàn)對(duì)環(huán)境的理解;規(guī)劃階段利用感知信息來(lái)制定相應(yīng)的執(zhí)行任務(wù)。決策層通過(guò)既定算法按照效率最大化原則對(duì)任務(wù)進(jìn)行劃分,由多機(jī)器人同時(shí)執(zhí)行,利用協(xié)同智能決策技術(shù)引導(dǎo)多機(jī)器人協(xié)作完成測(cè)量任務(wù)。
3 研究動(dòng)向
3.1 研究現(xiàn)狀
“機(jī)器人”一詞提出近百年,歷次技術(shù)革命推動(dòng)了機(jī)器人概念的延伸,自1954年世界上第一臺(tái)機(jī)器人誕生以來(lái),協(xié)助或取代人類(lèi)工作則是不變的目標(biāo)追求。
測(cè)量機(jī)器人相關(guān)技術(shù)的研究,可追溯至1949年,W·Grey Walter設(shè)計(jì)了能夠感知光源并朝其運(yùn)動(dòng),同時(shí)進(jìn)行避障的機(jī)器人。在1966年至1972年間斯坦福研究院研制出了世界上第一臺(tái)自主移動(dòng)機(jī)器人Shakey。雖然Shakey只能解決機(jī)器人簡(jiǎn)單的感知、運(yùn)動(dòng)規(guī)劃和控制問(wèn)題,卻是當(dāng)時(shí)將人工智能(aritificial intelligence,AI)應(yīng)用于機(jī)器人領(lǐng)域最為成功的研究平臺(tái)。1979年,斯坦福大學(xué)人工智能實(shí)驗(yàn)室研制成功了Stanford Cart機(jī)器人,它通過(guò)立體視覺(jué)實(shí)現(xiàn)目標(biāo)定位、避障和路徑規(guī)劃等功能,能夠跟蹤地面的白線進(jìn)行運(yùn)動(dòng)。1986年,卡內(nèi)基梅隆大學(xué)成功研發(fā)了具有里程碑意義的自動(dòng)駕駛汽車(chē)NavLab-1,其通過(guò)激光測(cè)距雷達(dá)和可見(jiàn)光相機(jī)提供測(cè)距信息和圖像信息。1996年,Omead Amidi等研發(fā)了第一架基于視覺(jué)里程計(jì)的自主無(wú)人直升機(jī)。該直升機(jī)利用影像信息進(jìn)行定位、自穩(wěn)和導(dǎo)航,并對(duì)地面目標(biāo)進(jìn)行跟蹤。
步入21世紀(jì)后,針對(duì)測(cè)量機(jī)器人的研究和應(yīng)用越來(lái)越普遍。2011年,美國(guó)太空總署(NASA)發(fā)射的Curiosity火星探測(cè)器,其導(dǎo)航與控制分系統(tǒng)利用導(dǎo)航相機(jī)拍攝的影像數(shù)據(jù)重建三維場(chǎng)景并同步計(jì)算火星車(chē)的位置和姿態(tài)信息,從而完成路徑規(guī)劃任務(wù)[5],代表了星表機(jī)器人導(dǎo)航與控制的最高水平。2012年,Kumar實(shí)驗(yàn)室研究了一種適用于多層建筑室內(nèi)空間探索建圖的飛行機(jī)器人。該機(jī)器人使用鵜鶘無(wú)人機(jī)作為飛行平臺(tái),上面搭載了二維激光掃描儀和RGBD相機(jī)作為傳感器,并將采集到的點(diǎn)云和RGBD數(shù)據(jù)用機(jī)載處理器在線計(jì)算,從而實(shí)現(xiàn)無(wú)人機(jī)在室內(nèi)空間的自主探索任務(wù)。該無(wú)人機(jī)不僅能完成單個(gè)房間的探索,還能自主穿越樓層,進(jìn)而完成整個(gè)多層建筑的探索并獲取其點(diǎn)云數(shù)據(jù)[6]。澳大利亞DATA61實(shí)驗(yàn)室研制了Hovermap無(wú)人機(jī)平臺(tái),可以通過(guò)自主飛行和旋轉(zhuǎn)激光雷達(dá)獲取GPS拒止環(huán)境中的高質(zhì)量點(diǎn)云數(shù)據(jù)[7]。馬德里理工大學(xué)開(kāi)發(fā)了基于ARM的輕型低成本立體視覺(jué)預(yù)處理系統(tǒng),用于無(wú)人機(jī)在室內(nèi)空間的導(dǎo)航和測(cè)圖[8]。俄勒岡州立大學(xué)將攜帶深度相機(jī)和光流相機(jī)的無(wú)人機(jī)用于室內(nèi)場(chǎng)景建圖,并提出一種有限電量和通信條件下多無(wú)人機(jī)協(xié)同探索算法[9]。瑞士蘇黎世聯(lián)邦理工大學(xué)提出了一種通用的自監(jiān)督激光雷達(dá)測(cè)程估計(jì)方法,可以有效利用激光雷達(dá)數(shù)據(jù),同時(shí)保持實(shí)時(shí)性能,并成功應(yīng)用于足式、履帶式和輪式機(jī)器人[10]。2020年,波士頓動(dòng)力公司發(fā)布的spot2.0具備自主導(dǎo)航的能力,可以根據(jù)環(huán)境變化自動(dòng)調(diào)整姿態(tài),并能夠?qū)崿F(xiàn)多機(jī)協(xié)同。2015年10月,特斯拉推出了半自動(dòng)駕駛系統(tǒng)Autopilot,是第一個(gè)投入商用的自動(dòng)駕駛技術(shù)[11]。谷歌Waymo、通用汽車(chē)、Nuro等公司也在無(wú)人車(chē)領(lǐng)域進(jìn)行了深入研究。
雖然國(guó)內(nèi)對(duì)測(cè)量機(jī)器人技術(shù)的研究相較國(guó)外起步較晚,但同樣也取得了一系列成果。2013年,我國(guó)首輛月球車(chē)玉兔號(hào)駛抵月球表面,承擔(dān)月面自動(dòng)巡視勘察和科學(xué)探測(cè)等任務(wù)[13]。玉兔號(hào)月球車(chē)配置了全景相機(jī)、測(cè)月雷達(dá)、紅外成像光譜儀等傳感器設(shè)備,具備場(chǎng)景感知和路徑規(guī)劃的能力。大疆M300RTK無(wú)人機(jī)將雙目視覺(jué)和紅外傳感器同時(shí)引入到機(jī)身的6個(gè)面上,帶來(lái)全六向環(huán)境感知及定位、避障能力,并可實(shí)現(xiàn)對(duì)動(dòng)態(tài)目標(biāo)的自主識(shí)別、定位和跟蹤功能。浙江大學(xué)FAST實(shí)驗(yàn)室研制出了能夠?qū)崿F(xiàn)完全自主層次化決策的飛行機(jī)器人,并獲得了國(guó)際空中機(jī)器人大賽第七代任務(wù)世界冠軍[14]。香港科技大學(xué)機(jī)器人研究所在無(wú)人機(jī)自主導(dǎo)航和場(chǎng)景重建方面的應(yīng)用也有較深的技術(shù)積累,其研制的猛禽無(wú)人機(jī)能快速自主地穿越樹(shù)林和室內(nèi)復(fù)雜環(huán)境[15]。武漢大學(xué)測(cè)繪學(xué)院重點(diǎn)研究了飛行測(cè)量機(jī)器人的自主導(dǎo)航和自主感知技術(shù)[16-17]。中國(guó)科學(xué)院沈陽(yáng)自動(dòng)化研究所研制的“云雀”自主飛行機(jī)器人具備自主起降、仿地飛行、動(dòng)態(tài)避障等自主功能,首次實(shí)現(xiàn)了我國(guó)機(jī)器人化高海拔環(huán)境科考[18]。2017年,宇樹(shù)科技研制了Laikago四足機(jī)器人,能夠?qū)崿F(xiàn)高精度的定位導(dǎo)航和高速高動(dòng)態(tài)步態(tài)規(guī)劃與平衡控制,代表了國(guó)內(nèi)四足機(jī)器人的先進(jìn)水平[19]。百度于2015年推出無(wú)人駕駛汽車(chē),并在2018年第一次面向我國(guó)公眾開(kāi)放運(yùn)營(yíng)L4級(jí)的自動(dòng)駕駛車(chē)輛[20]。
國(guó)內(nèi)外研發(fā)的代表性的測(cè)量機(jī)器人如圖6所示。
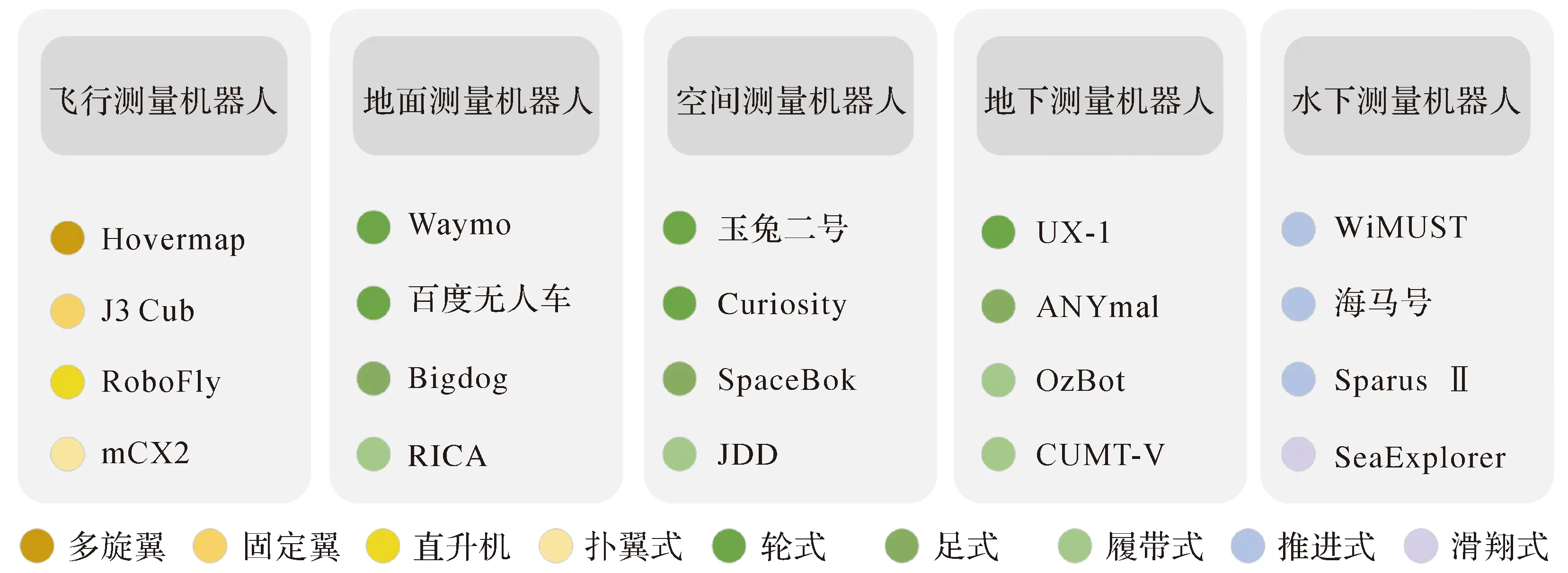
圖6 測(cè)量機(jī)器人研究進(jìn)展Fig.6 Advanced research results of surveying robots
3.2 研究方向
圍繞測(cè)量機(jī)器人發(fā)展需求,面向測(cè)繪遙感與導(dǎo)航等重點(diǎn)應(yīng)用領(lǐng)域,需要集中突破自主導(dǎo)航與感知測(cè)量關(guān)鍵技術(shù),形成測(cè)量機(jī)器人系統(tǒng)自主導(dǎo)航與感知測(cè)量共性技術(shù),奠定產(chǎn)業(yè)化發(fā)展基礎(chǔ)。主要研究方向包括:
(1) 自主導(dǎo)航與智能規(guī)劃。利用慣性、衛(wèi)星、視覺(jué)、激光雷達(dá)、聲吶等綜合導(dǎo)航技術(shù),建立多場(chǎng)景適配、高度兼容性、智能切換的多傳感器融合導(dǎo)航架構(gòu),解決有限計(jì)算資源下的實(shí)時(shí)快速處理、多源異質(zhì)信息的自適應(yīng)融合、多維故障的自主診斷與重構(gòu)等瓶頸,適應(yīng)多場(chǎng)景、大尺度、動(dòng)態(tài)變化、非結(jié)構(gòu)化復(fù)雜環(huán)境下的在線實(shí)時(shí)路徑規(guī)劃。
(2) 協(xié)同控制。測(cè)量機(jī)器人是一個(gè)多輸入多輸出的非線性系統(tǒng),具有時(shí)變、強(qiáng)耦合和非線性的特點(diǎn)。運(yùn)動(dòng)控制技術(shù)是機(jī)器人的底層控制技術(shù),滿(mǎn)足不同的應(yīng)用環(huán)境下自抗擾控制、自適應(yīng)控制和模型預(yù)測(cè)控制等多種控制,對(duì)機(jī)器人機(jī)械運(yùn)動(dòng)部件的位置、速度等進(jìn)行實(shí)時(shí)的控制管理,使其按照預(yù)期的運(yùn)動(dòng)軌跡和規(guī)定的運(yùn)動(dòng)參數(shù)進(jìn)行運(yùn)動(dòng),實(shí)現(xiàn)測(cè)量機(jī)器人精確運(yùn)動(dòng)控制。
(3) 自主環(huán)境感知和重建。利用多種傳感器自主獲取環(huán)境圖像、點(diǎn)云、溫度等信息,通過(guò)多源信息的自組織并實(shí)時(shí)重建測(cè)量環(huán)境。
(4) 場(chǎng)景理解與自主測(cè)量。以測(cè)量任務(wù)為驅(qū)動(dòng),融合二維影像、三維場(chǎng)景信息等多維度、多角度觀測(cè)數(shù)據(jù),通過(guò)訓(xùn)練獲取知識(shí),以認(rèn)識(shí)和理解其自身、外界環(huán)境以及測(cè)量對(duì)象的問(wèn)題,并按照測(cè)量對(duì)象的預(yù)先定義在線實(shí)時(shí)獲取測(cè)量目標(biāo)信息。
4 發(fā)展展望
從目前的無(wú)人機(jī)、移動(dòng)測(cè)量等自動(dòng)化測(cè)量裝備到類(lèi)人智能測(cè)量機(jī)器人,需要攻克的關(guān)鍵技術(shù)還具有相當(dāng)?shù)碾y度,從技術(shù)的可行性分析,還需要經(jīng)歷共融測(cè)量機(jī)器人發(fā)展階段,然后才能發(fā)展到類(lèi)人測(cè)量機(jī)器人。共融機(jī)器人是指能與作業(yè)環(huán)境、自主適應(yīng)復(fù)雜動(dòng)態(tài)環(huán)境并協(xié)同作業(yè)的機(jī)器人,具有多模態(tài)感知及其自主協(xié)同作業(yè)的能力。共融測(cè)量機(jī)器人是指在衛(wèi)星導(dǎo)航拒止環(huán)境、復(fù)雜測(cè)量環(huán)境及測(cè)量人員難以到達(dá)的環(huán)境下人機(jī)自主協(xié)同測(cè)量的機(jī)器人,核心在于測(cè)量環(huán)境自適應(yīng)及人機(jī)自主協(xié)同能力。
縱觀全球,美國(guó)工業(yè)互聯(lián)網(wǎng)戰(zhàn)略、歐盟火花計(jì)劃、日本機(jī)器人新戰(zhàn)略、中國(guó)制造2025戰(zhàn)略等均將機(jī)器人產(chǎn)業(yè)視為科技強(qiáng)國(guó)戰(zhàn)略的必爭(zhēng)之地。隨著智能化測(cè)繪時(shí)代的到來(lái),現(xiàn)有測(cè)繪硬件裝備集成度不夠、自動(dòng)化水平不足、作業(yè)能力有限的問(wèn)題愈加突顯,以測(cè)量機(jī)器人為代表的下一代測(cè)繪裝備將成為測(cè)繪領(lǐng)域的卡脖子技術(shù),嚴(yán)重制約著測(cè)繪地理信息產(chǎn)業(yè)的轉(zhuǎn)型升級(jí)。美國(guó)測(cè)繪行業(yè)巨頭天寶與波士頓動(dòng)力建立戰(zhàn)略聯(lián)盟,開(kāi)發(fā)出能在危險(xiǎn)復(fù)雜環(huán)境下全自主作業(yè)的四足測(cè)量機(jī)器人,我國(guó)應(yīng)提前布局,以先發(fā)優(yōu)勢(shì)占據(jù)測(cè)量機(jī)器人發(fā)展的制高點(diǎn)。
自主技術(shù)是推動(dòng)地理信息產(chǎn)業(yè)裝備及其應(yīng)用走向智能化的基礎(chǔ)和核心。自主無(wú)人機(jī)、自主駕駛、測(cè)量機(jī)器人等自主設(shè)備是先進(jìn)國(guó)家地理信息產(chǎn)業(yè)領(lǐng)域競(jìng)相發(fā)展的技術(shù)制高點(diǎn),決定這類(lèi)自主設(shè)備智能化程度的核心是自主導(dǎo)航技術(shù)。按照智能化程度,導(dǎo)航可分為人機(jī)協(xié)同、自動(dòng)、自主3類(lèi),目前總體上處于人機(jī)協(xié)同向自動(dòng)導(dǎo)航的技術(shù)攻關(guān)和部分產(chǎn)業(yè)化的發(fā)展階段,距離高度智能化自主設(shè)備要求的自主導(dǎo)航,還存在相當(dāng)?shù)牟罹啵虼耍瑥奈覈?guó)優(yōu)先發(fā)展產(chǎn)業(yè)的角度以及決定未來(lái)地理信息產(chǎn)業(yè)核心競(jìng)爭(zhēng)力技術(shù)角度考慮,重點(diǎn)發(fā)展自主導(dǎo)航關(guān)鍵技術(shù)及其產(chǎn)業(yè)化應(yīng)用,特別是結(jié)合“北斗+5G”技術(shù)背景,發(fā)展SLAM及慣性導(dǎo)航等多模融合導(dǎo)航、在線實(shí)時(shí)自主路徑規(guī)劃、地理/位置智能與人工智能深度融合的在線感知分析決策、高精度三維導(dǎo)航電子地圖實(shí)時(shí)群智更新等技術(shù),形成一批自主導(dǎo)航核心技術(shù)。
測(cè)繪數(shù)據(jù)的獲取能力及實(shí)時(shí)化智能處理水平?jīng)Q定了測(cè)繪科學(xué)的發(fā)展水平,人工智能與測(cè)繪裝備研發(fā)相結(jié)合,無(wú)疑為我國(guó)研發(fā)智能化的測(cè)繪裝備提供了的發(fā)展機(jī)遇,測(cè)量機(jī)器人是我國(guó)趕超世界高端測(cè)量裝備水平的契機(jī)。
5 結(jié) 語(yǔ)
測(cè)繪數(shù)據(jù)獲取以及從“數(shù)據(jù)-信息-知識(shí)”轉(zhuǎn)化實(shí)現(xiàn)自主化、實(shí)時(shí)化,這是從數(shù)字化/信息化測(cè)繪到智能化測(cè)繪必須解決的理論和技術(shù)問(wèn)題。測(cè)量機(jī)器人是解決智能化測(cè)繪中數(shù)據(jù)實(shí)時(shí)自主獲取以及在線決策問(wèn)題的新技術(shù)途徑,是目前測(cè)量裝備的一次質(zhì)的提升。例如,從無(wú)人機(jī)測(cè)量系統(tǒng)發(fā)展到飛行測(cè)量機(jī)器人,這也將是未來(lái)高端測(cè)量裝備競(jìng)爭(zhēng)的一個(gè)熱點(diǎn)。本文重點(diǎn)探討了測(cè)量機(jī)器人的內(nèi)涵與組成,剖析了其技術(shù)難點(diǎn)與關(guān)鍵技術(shù),分析了測(cè)量機(jī)器人的研究方向,旨在引起測(cè)繪領(lǐng)域的共同關(guān)注,共同推進(jìn)智能測(cè)繪技術(shù)的創(chuàng)新發(fā)展。
猜你喜歡
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
浙江國(guó)土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
中國(guó)公共安全(2017年7期)2017-10-13 08:18:11
商周刊(2017年5期)2017-08-22 03:35:26
電子制作(2017年9期)2017-04-17 03:01:00
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
