一種具有參考模型的功率-頻率控制方法
2021-10-28 08:40:56羅倚天趙文利丁占濤張雨晗程遠楚
中國農村水利水電 2021年10期
關鍵詞:方法
羅倚天,趙文利,丁占濤,張雨晗,程遠楚
(1.武漢大學水力機械過渡過程教育部重點實驗室,武漢430072;2.新疆開都河流域水電開發有限公司,新疆維吾爾自治區庫爾勒841000)
0 引 言
水電機組的一次調頻對維持電網頻率的穩定至關重要,它可以根據負荷的變化不斷調整有功功率輸出,快速提供功率支援,提高電力系統的穩定性和可靠性[1]。目前,電力系統的結構越來越復雜,容量越來越大,區域間聯網、遠距離大容量輸電和電力交換頻繁[2],電站的一次調頻考核越發嚴格。
為考核水電機組的一次調頻性能,各電網公司均提出了相應的考核評價方法,比如西北電網要求水電站滿足《西北區域發電廠并網運行管理實施細則》及《西北區域并網發電廠輔助服務管理實施細則》等指標要求[3]。各電站只有在實際運行中滿足電網各項指標要求才不會被考核。目前,水電機組調速器多采用PID控制算法,由于水輪機的非線性特性,當運行水頭與導葉開度變化時,為取得良好的一次調頻效果,需實時地根據水頭與開度調整一次調頻控制參數。參數調整的過于頻繁或調整不當可能引起系統的自激振蕩[4]和出現不穩定問題。
針對變工況下一次調頻存在的問題,文獻[5]從改變穿越振動區、一次調頻與AGC 配合、機組小負荷分配等方面改進了AGC 控制策略;文獻[6]通過改進水電機組一次調頻和AGC 控制策略以提高穩定性;文獻[7]以小灣水電廠多次一次調頻被考核為例,優化了變工況下一次調頻和AGC的配合策略。這些研究基本都是通過改變一次調頻與AGC 控制策略提高兩者的協調性而使一次調頻指標滿足考核要求,且多從AGC的角度出發,進行策略的優化。本文擬從一次調頻角度出發,提出一種響應速度快、調節品質高、指標達標率高、控制參數適應性強的帶有參考模型的功率-頻率控制方法,以此提高調節系統一次調頻的質量,改善電站被考核的情況。
1 水輪機調速器功率-頻率控制方法
1.1 功率-頻率綜合控制方法
在水輪機調速器中,往往設有頻率調節、開度調節和功率調節三種模式。目前,在大多數水輪機調速器中,功率調節模式和頻率調節模式采用同一個PID 控制器,功率差值經過調差率作用后和頻率差值一同送入控制器進行偏差校正,直至偏差為0 后調節過程結束。本文稱此種方式為功率-頻率的綜合控制方法,如圖1所示。
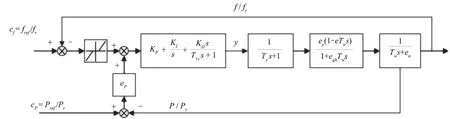
圖1 功率-頻率綜合控制方法Fig.1 Integrated power-frequency control method
當水電機組并入大電網時,改變機組出力對電網的頻率影響很小,可以忽略,因此可將頻率調節環看作開環。同時,因為機組頻率變化很小,機組出力可視為與水輪機力矩相同。根據圖1 中的數學模型進行一次調頻和功率調節的動態特性分析,在電站進行功率模式控制時,一般采用PI 規律,將微分環節切除,此處將不考慮微分項,力矩的拉氏變換的主導極點為頻率指令信號實現時間的估計值均為。
由公式可知,調節時間TL跟eP存在一定的關系,當eP變化時,TL也會發生變化。顯然,調整eP時,為保證一次調頻的響應時間合格,KP和KI值需相應地進行調整。這就給參數整定帶來了困難。
1.2 具有參考模型的功率-頻率控制方法
在圖1的基礎上,本文提出一種具有參考模型的功率-頻率控制方法,如圖2 所示。與圖1 的方法相比,頻率調節模式采用上面的PID 控制器,功率調節模式采用下面的PID 控制器。并大網運行時,選擇功率調節模式,其工作過程如下:
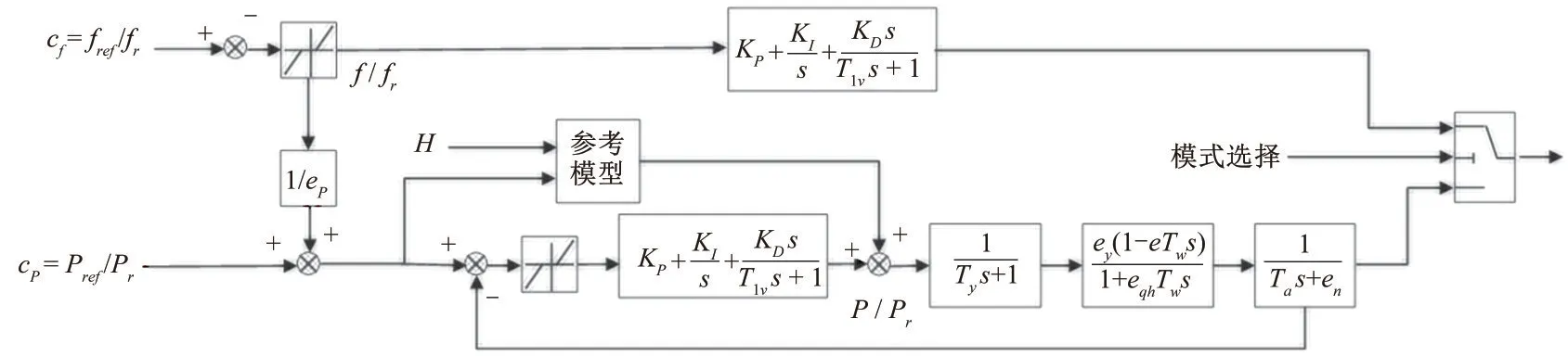
圖2 具有參考模型的功率-頻率控制方法Fig.2 Power-frequency control method with reference model
頻率給定和取自電廠的實測頻率信號形成頻率偏差,偏差值經過調差率作用后折算成功率修正信號送至參考模型,折算公式為功率給定與取自發電機機端的實時功率進行綜合形成功率偏差并與頻率偏差一同送至PI 環節進行校正。水頭輸入即為當前工作水頭,它與功率修正值及給定功率一同送入參考模型,參考模型可由水輪機運轉特性曲線求得,將導葉開度表示為水頭和功率的函數,即y=f(H,P)。即可以利用當前運行水頭和目標功率求出對應的導葉開度值,直接參與控制。當電網頻率變化,頻差超過一次調頻死區時,輸出的頻率差信號按調差率要求轉換成對應的功率信號PC去修正給定功率PS,即有y=f(H,PS+PC),此時的開度即為查參考模型所得的一次調頻建議參考開度。對于剩余的實際功率與目標功率的差值,由PID控制器產生相應輸出予以消除。
此種調節模式的響應時間由參考模型確定,因此,可以加快一次調頻和AGC的響應速度。
若不考慮參考模式的作用,對圖2 所示功率調節模式進行一次調頻和功率調節的動態特性分析,力矩的拉氏變換的主導極點為,頻率指令信號實現時間的估計值為由公式可知調節時間TL與eP無關,eP變化時,TL不會發生變化,因此參數KP和KI的整定也相對容易些。
2 一次調頻仿真試驗
以西北某水電站為例,根據實際情況采用非線性模型,分析電站水頭變化對一次調頻性能的影響。該電站額定工作水頭Hr=84 m,額定轉速nr=187.5 r/min,額定流量為Qr=119.66 L/min,機組額定出力Pr=92.3 MW,水輪機力矩特性如圖3所示,調差率ep=0.04,一次調頻死區±0.05 Hz,功率死區0.01。該電站設有調壓室,機組至分叉管節點的水流慣性時間常數Tw1=1.125 4 s,分叉管節點至上游水庫的水流慣性時間常數Tw2=3.493 2 s。
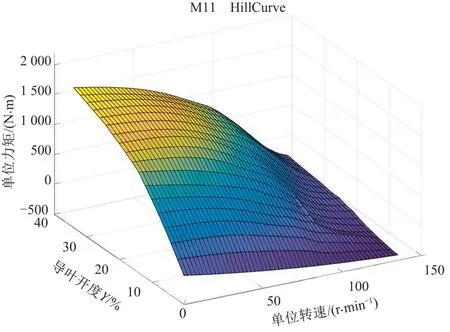
圖3 水輪機力矩特性曲線Fig.3 Torque characteristic curve of hydraulic turbine
2.1 功率-頻率綜合控制方法下一次調頻仿真試驗
采用圖1 所示的功率-頻率控制方法,在不同水頭下,進行頻率階躍信號下的一次調頻仿真試驗,整定一組參數值KP= 1,KI= 5,計算相關指標如表1所示。以《西北區域發電廠并網運行管理實施細則》的指標要求為依據,一次調頻響應滯后時間應小于4 s;單次大頻差擾動一次合格率I(積分電量比例與響應值比例的平均數)應不小于80%,該電站的一次調頻試驗合格,其典型階躍響應如圖3所示。
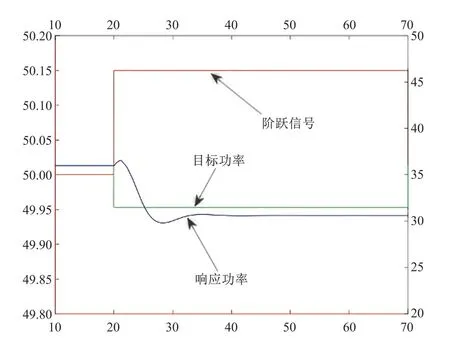
圖4 84 m水頭下功率達到40%階躍響應過程Fig.4 Step response with power up to 40%under water head of 84 m
由表1 可知,在同樣水頭不同出力時,滯后時間、響應時間和積分電量指標變化明顯,在高水頭大功率時出現積分電量比值和滯后時間不滿足考核要求的情況。在同樣出力不同水頭時,由于水頭的變化會導致調節質量變差,若需滿足各水頭下一次調頻考核要求,需開展多種水頭下的一次調頻試驗,且調速器需增加隨水頭變化自動調整一次調頻參數的功能。
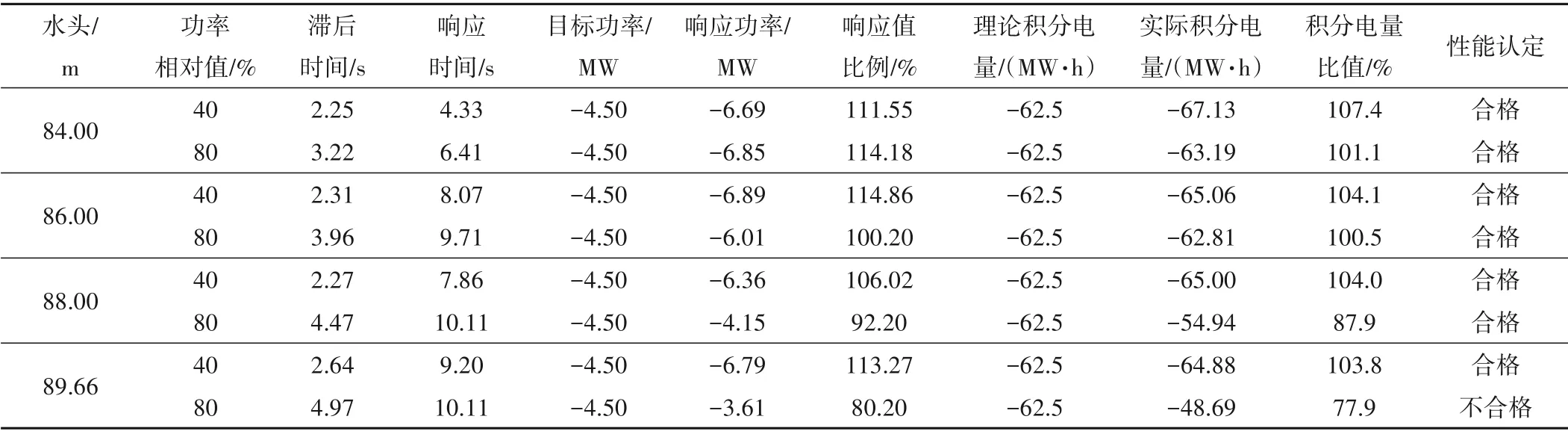
表1 功率-頻率綜合控制方法下的一次調頻試驗結果Tab.1 Results of primary frequency modulation under Integrated power-frequency control method
2.2 具有參考模型的功率-頻率綜合控制方法下一次調頻仿真試驗
依據電站實際運行數據和水輪機的運轉特性曲線,建立參數模型如圖5所示,采用非線性模型進行一次調頻仿真試驗,仍然整定一組PI參數:Kp= 0.1,KI= 0.1,試驗結果如表2所示,典型階躍響應如圖6所示。
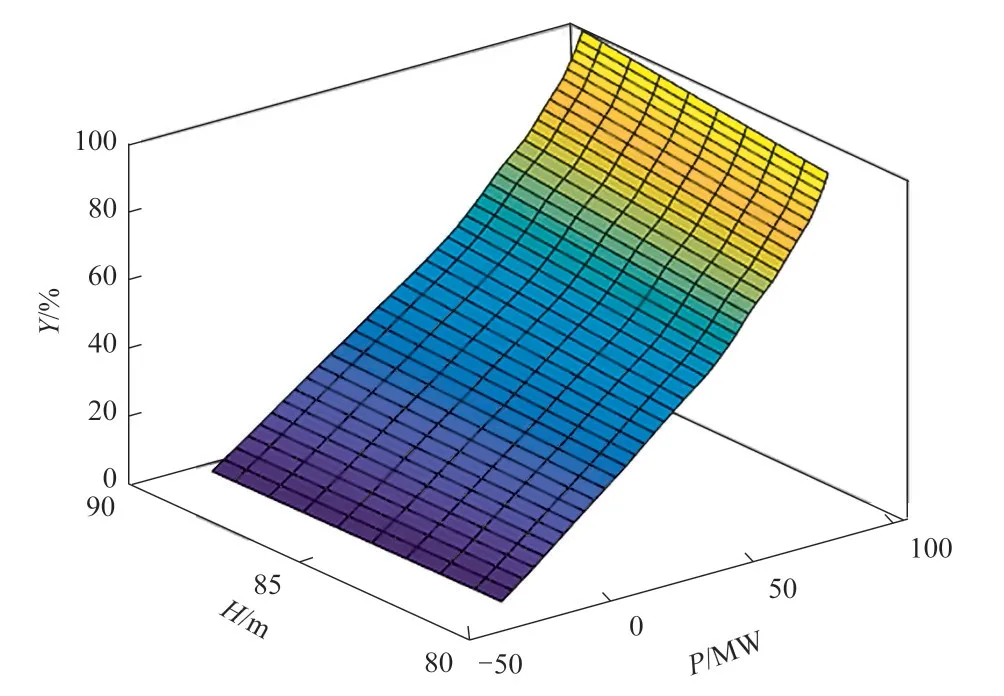
圖5 開度與水頭和出力的關系Fig.5 The relation between opening and head and output
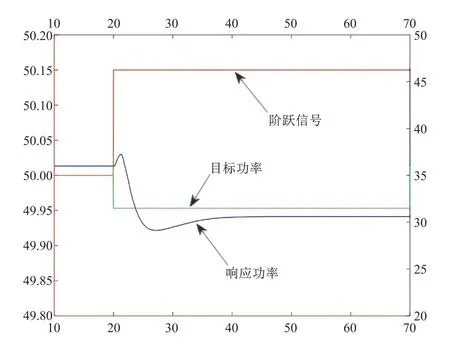
圖6 84 m水頭下功率達到40%階躍響應過程Fig.6 Step response with power up to 40%under water head of 84 m
由表2 的結果可以看出,在不同水頭同樣出力下,響應時間、滯后時間、響應值比例和積分電量比值的變化幅度較小,在相同水頭不同出力下,各項指標也更為接近,且均滿足一次調頻考核要求。與功率-頻率綜合控制方法得出的結果相比,控制參數無需根據運行工況進行調整。
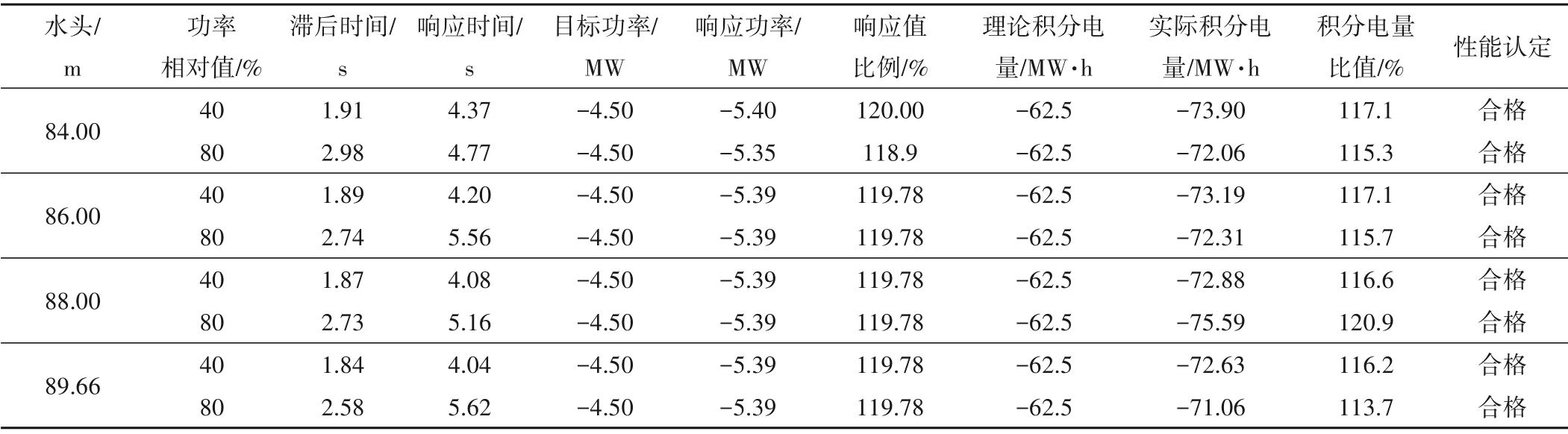
表2 具有參考模型的功率-頻率控制方法下的一次調頻試驗Tab.2 Results of primary frequency modulation under Power-frequency control method with reference model
3 實際應用與分析
前述分析是以電網頻率階躍變化進行分析的。實際電網中,機組在進行一次調頻時,電網頻率是逐步恢復的,和仿真試驗并不完全相同。本節以電網實際頻率變化進行電站實際應用分析。
3.1 功率-頻率綜合控制方法結果分析
對于第3節中所述電站,在調速器未改造前,以電網實測頻率為輸入信號,開展不同水頭和不同功率下的一次調頻仿真試驗。取一次調頻試驗合格的一組PI 整定參數:KP= 1,KI= 5,一次調頻試驗結果如表3 所示。以89.66 m 水頭下功率達到80%工況為例,其典型動態響應如圖7所示。
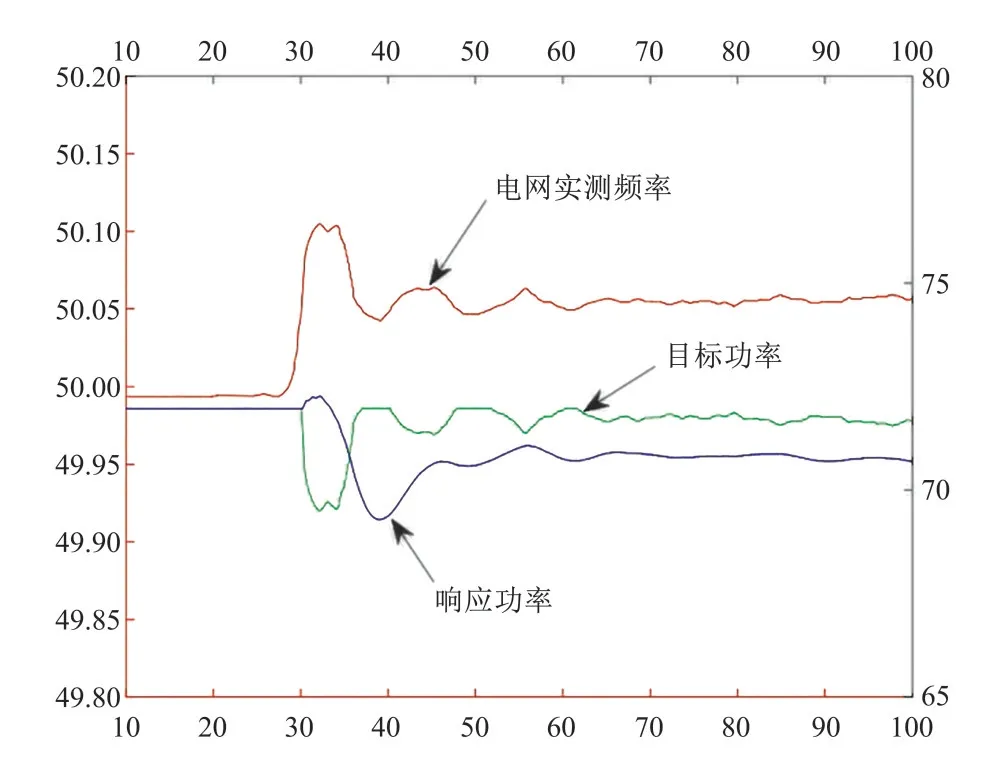
圖7 89.66 m水頭下功率達到80%機組動態響應曲線圖Fig.7 Step response with power up to 80%under water head of 89.66 m
分析表3 可知,運用綜合控制方法在實測頻率信號下出現了不合格的情況。在不同的水頭下,當機組功率達到80%時,單次大頻差擾動一次合格率I小于80%,在84 m 和86 m 水頭(低水頭)時還會出現滯后時間大于4 s 的情況,一次調頻考核不合格。所以固定一組調節參數,當工況發生改變,尤其是大負荷時一次調頻指標難以達到要求,一次調頻的調節品質不高。
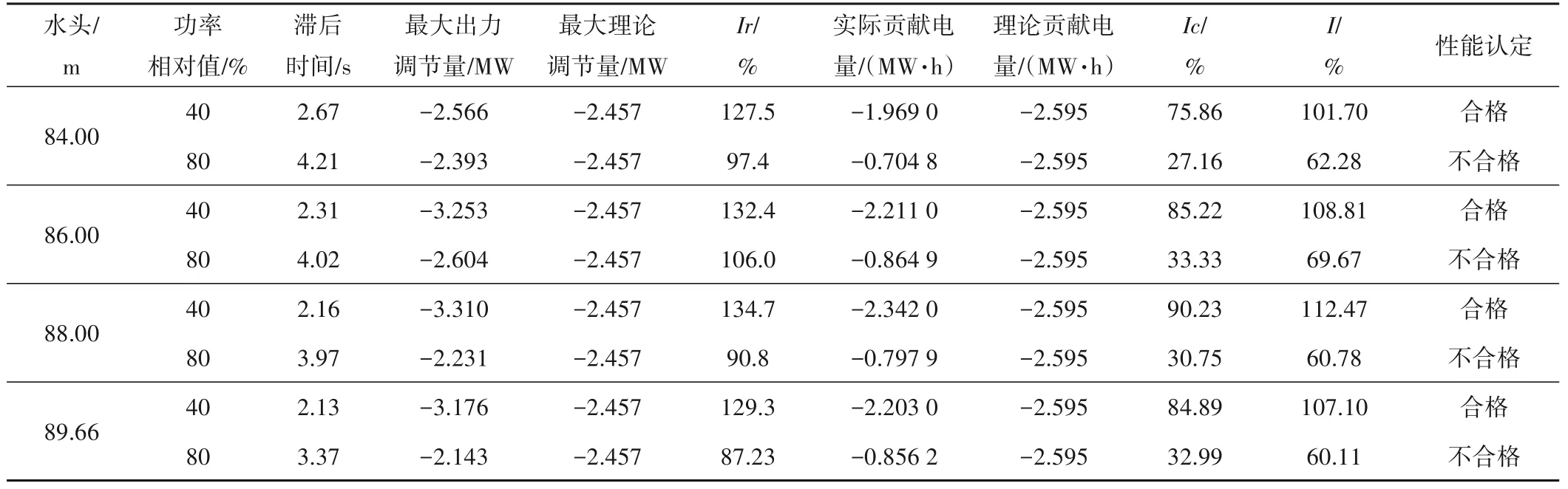
表3 實測頻率下的功率-頻率綜合控制方法一次調頻試驗結果Tab.3 Results of primary frequency modulation under Integrated power-frequency control method under real frequency signal
3.2 具有參考模型的功率-頻率控制方法結果分析
采用具有參考模型的功率-頻率方法,建立調節系統非線性仿真模型,根據電廠提供的飛逸特性曲線和綜合特性曲線計算出不同水頭和不同接力器行程下的發電機輸出功率,并建立參考模型,參考模型中的機組出力三維圖如圖3 所示。選取一次調頻試驗合格的PI 參數:KP= 0.1,KI= 0.1,以電網實測信號作為輸入,得到的一次調頻仿真結果如表4所示,其典型動態響應過程如圖8所示。
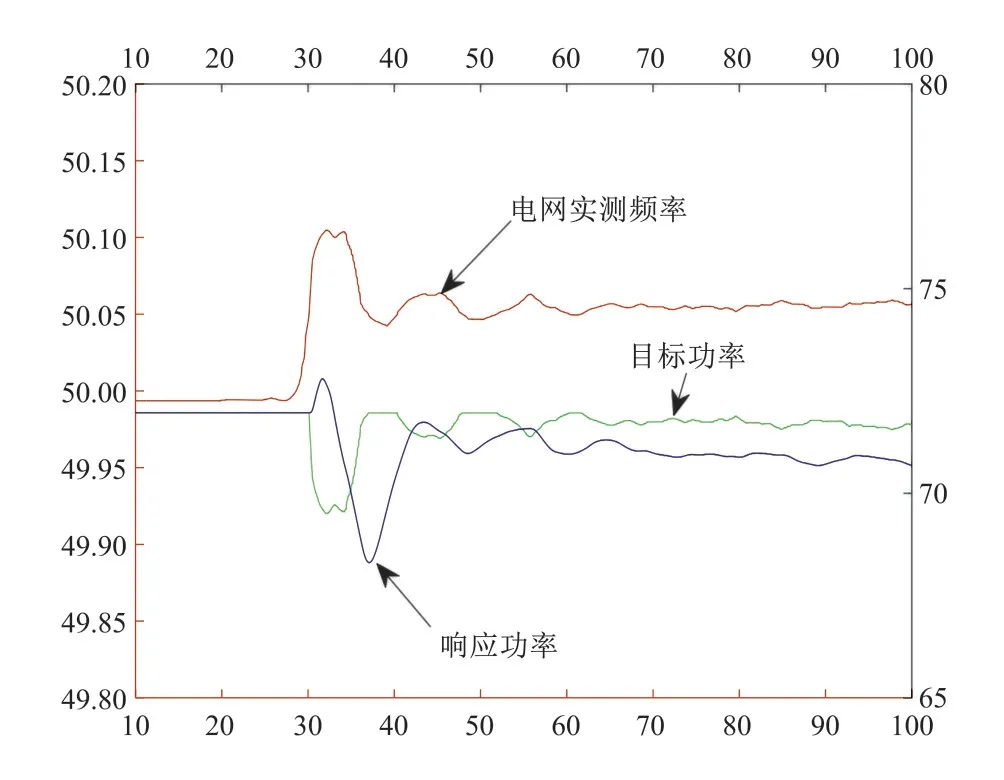
圖8 89.66 m水頭下功率達到80%時機組動態響應曲線圖Fig.8 Step response with power up to 80%under water head of 89.66 m
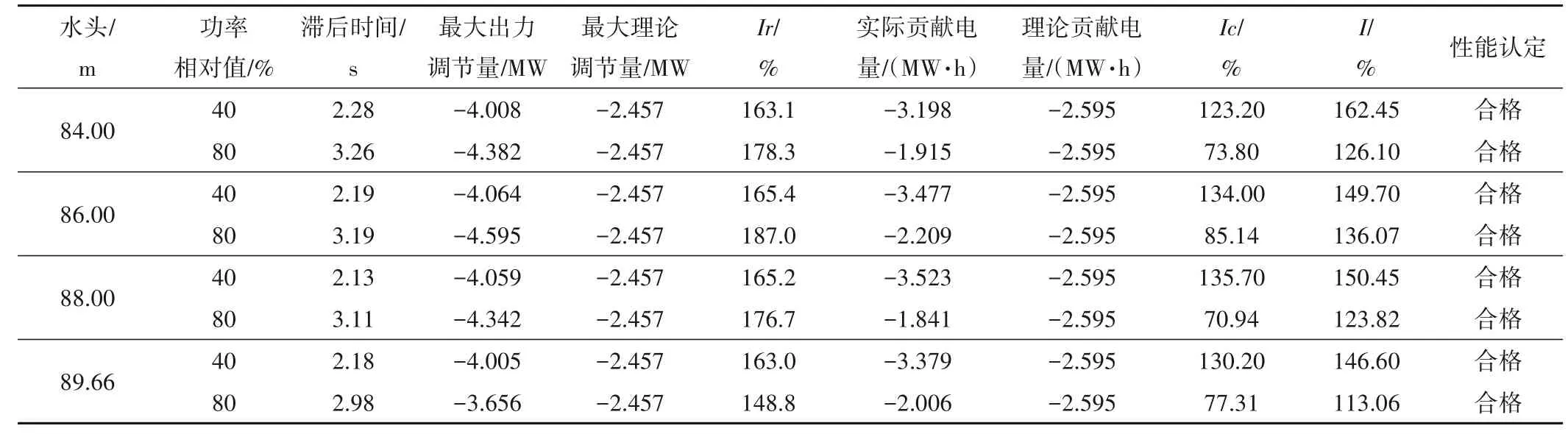
表4 實測頻率下具有參考模型的功率-頻率控制方法一次調頻試驗結果Tab.4 Results of primary frequency modulation under Power-frequency control method with reference model under real frequency signal
分析表4可知,在不同的水頭下和不同機組出力下,取同一組整定參數,大功率下的單次大頻差擾動一次合格率I滿足西北電網要求的80%,滯后時間小于4 s,一次調頻過程均合格。與頻率-功率綜合控制方法相比,在水頭和出力變化時,此方法在固定一組整定參數下,滯后時間更短,響應速度更快,一次調頻均能取得較好效果。
4 結 論
本文通過分析功率-頻率綜合控制的動態調節特性,結合西北某水電站出現的一次調頻被考核的情況,提出了一種具有參考模型的功率-頻率的控制方法,該模型結構簡單,工況改變時,一次調頻過程仍可以共用一組參數,解決了在變工況下頻繁更改調節參數、一次調頻調節品質差、達標率低的問題。在電廠實際應用中,取得了較好的控制效果。 □
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56