高速多體船的解析預測控制減縱搖方法
2021-11-01 09:32:28張軍溫昊劉志林李國勝
兵工學報 2021年9期
關鍵詞:模型
張軍, 溫昊, 劉志林, 李國勝
(1.江蘇大學 電氣信息工程學院, 江蘇 鎮江 212013; 2.哈爾濱工程大學 智能科學與工程學院, 黑龍江 哈爾濱 150001)
0 引言
高速多體船使用流線型支柱將排水體積與主體部分連接起來,具有甲板面積大、航行阻力小、耐波性好、運載能力強、橫向穩定性好等優點[1]。然而,在高海況航行時高速多體船的升沉和縱搖運動變化劇烈,這是因為多體船具有細長的側體,不同航速的水動力會對水下船體產生不同程度的縱向傾覆力矩,該力矩隨縱傾角的增大而增大,并且多體船的縱向恢復力矩非常小。縱搖和升沉幅度過大,容易引起失速、艏部砰擊、乘員暈船等現象,嚴重影響適航性,因此需要采取合理的措施抑制升沉和縱搖運動幅度。目前在船體上安裝T型翼和壓浪板兩種附體可以實現協同減搖,T型翼安裝在船艏底部,可有效增加船體的附加質量和阻尼,降低高速多體船的垂向運動幅度;壓浪板安裝在船尾,可以實現減阻[2-3]。
高速多體船的減搖控制是根據多體船航態的改變自動調節T型翼和壓浪板的攻角,增加附體的恢復力和力矩[2],從而減少升沉和縱搖運動幅度。然而,多體船的升沉和縱搖運動之間存在強耦合,并且水動力學系數具有較強的不確定性。針對多體船耦合的垂向運動模型,文獻[4]提出比例- 微分控制和傳遞函數解耦矩陣方法來減少升沉和縱搖運動幅度,但是解耦矩陣需要事先準確辨識多體船傳遞函數,否則難以做到完全解耦,魯棒性較差。為了避免設計升沉和縱搖的解耦矩陣,文獻[5]設計線性高斯二次型控制器(LQG)實現減搖,但是沒有明確考慮水動力系數不確定性。為了提高減搖控制的魯棒性,文獻[6]提出模糊比例- 積分- 微分(PID)減搖控制,但是模糊規則選擇通常比較困難。文獻[7]在考慮最大海浪干擾下提出H∞控制來保證魯棒穩定性,但是減搖性能比較保守。上述研究主要從升沉和縱搖運動的鎮定問題來考慮,并沒有考慮高速多體船減搖性能的優化[8-9],而實際上減搖的目標是希望升沉和縱搖運動幅度盡可能地小,因此減搖控制尚需完善。
與H∞魯棒控制不同,預測控制不僅考慮鎮定控制,而且追求優化控制性能。預測控制根據被控對象的歷史數據和模型信息來預測系統未來的輸出,采用滾動優化方式獲得未來輸入,根據系統的輸出實時校正預測模型來減少魯棒控制的保守性,提高控制性能[10-12]。文獻[13]建立了高速多體船的狀態空間模型,采用預測控制與H∞魯棒控制進行減搖性能對比,結果表明預測控制的減搖性能明顯高于H∞魯棒控制,其原因在于:1)預測控制可以直接處理升沉和縱搖強耦合的多變量模型,不需要文獻[4]的復雜解耦矩陣設計;2)預測控制的滾動優化提高了減搖性能和魯棒性,不需要文獻[7]保守地假設海浪干擾的最大值。但是,預測控制采用序列二次規劃(QP)在線求解控制量,計算量過大,嚴重影響了實際應用。因此,降低預測控制的計算量是必須解決的問題。顯式預測控制采用離線設計和在線增益調度相結合,計算量較少,但是當離線區域劃分過多時在線增益調度計算量也較大[14]。文獻[15]提出連續解析預測控制,不需要在線調度參數,有效減少了預測控制的在線計算量,在高超聲速X-33驗證機的再入制導上得到驗證,取得了良好的效果,但是解析預測控制律中并沒有明確考慮模型不確性,以及風、浪、流等外部強干擾的影響,魯棒性有待進一步提高。
本文針對高速多體船的升沉和縱搖運動耦合以及減搖性能優化問題,提出計算量少的解析預測控制。建立T型翼和壓浪板作為減搖附體的高速多體船垂向控制模型,基于誤差反饋校正的模型進行預測,采用數值積分方法獲得解析連續預測控制律,提高減搖控制的實時性,給出閉環系統的一致有界理論分析。最后,給出解析預測控制方法與廣義預測控制等其他方法的減搖性能仿真對比,通過實驗驗證了所提方法的有效性。
1 高速多體船的垂向運動模型
將T型翼和壓浪板作為減搖附體,利用T型翼和壓浪板翼面角度變化生成的恢復力和力矩來抑制減少升沉和縱搖變化幅度。建立高速多體船的運動坐標系如圖1所示。以船舶的重心位置為坐標原點O,x軸正方向由船尾指向船艏;y軸垂直于船舶縱剖面且指向船舶左舷;z軸與水平面相垂直,背向地心。圖1中w、φ分別為升沉位移和縱搖角。
假設多體船以穩定航向和定常航速在無限深的水域行駛,忽略風和流等干擾,高速多體船的垂向運動模型[12]為
(1)

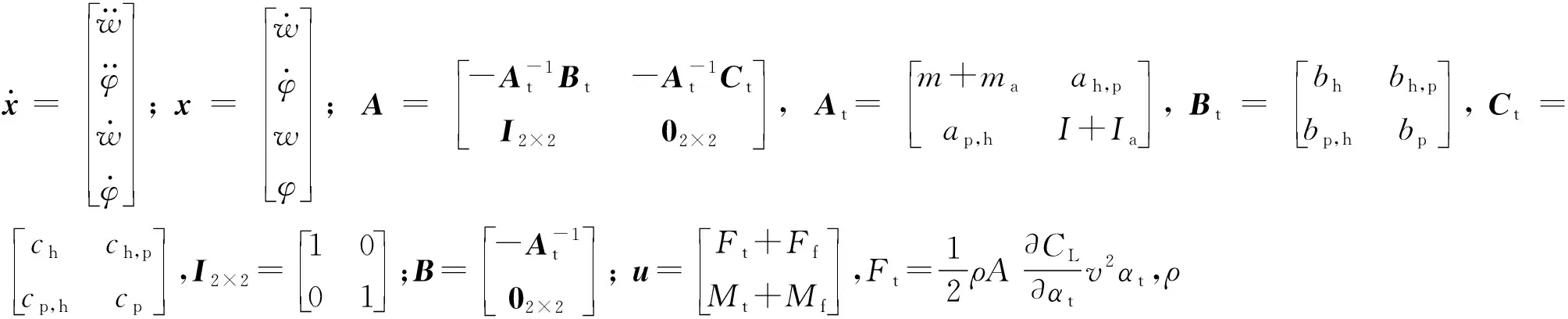
在模型(1)式中,縱搖和升沉運動存在加速度、速度、位移等變量強耦合,并且水動力學系數很難精確獲得,存在較強不確定性,給多體船的減縱搖控制帶來了困難。為便于控制器設計,將升沉和縱搖的耦合運動模型轉化為
(2)
式中:
2 基于誤差反饋校正的解析預測控制
2.1 傳統的解析預測控制減搖
為優化高速多體船的減搖性能,提出連續解析預測控制減搖。定義減搖預測控制的連續優化目標函數為

(3)
式中:t為當前時刻;T為控制時域,δc≤T<∞,δc為定義系統一致能控常數;Q、R分別為狀態與控制的加權矩陣,Q≥0,R>0. 為了提高減搖控制的動態性,以及保證有限時域優化的穩定性,這里引入終端等式穩定約束,
x(t+T|t)=0,
(4)
式中:x(t+T|t)表示基于t時刻對t+T時刻的預測狀態。則預測控制減搖轉化為如下優化問題:
(5)
式中:u*(t)為最優控制輸入。
文獻[15]中提出了解析快速預測控制方法,采用1階歐拉法近似描述預測模型,即

(6)

2.2 誤差反饋校正的解析預測控制減搖
由于預測控制本身具有誤差反饋校正功能,這里將實際x(t)與預測x(t|t-h)進行比較、得出預測誤差,利用預測誤差對名義模型的預測值進行反饋校正,使得連續解析預測控制具有一定的抗擾動和克服系統不確定性的能力。
定義t時刻的誤差為
e(t)=x(t|t)-x(t|t-h),
(7)
式中:x(t|t)=x(t)。則基于誤差反饋校正的一步預測模型為
x(t+kh|t)=(I+hA)x(t+(k-1)h|t)+
Bu(t+(k-1)h|t)+ξe(t),
(8)
式中:ξ為反饋校正系數。進一步迭代,得

(9)
J≈h(0.5L(0)+L(1)+…+L(k)+
…+L(N-1)+0.5L(N)),
(10)
式中:L(k)=xT(t+kh|t)Qx(t+kh|t)+uT(t+kh|t)Ru(t+kh|t).令vT=[uT(t|t),uT(t+h|t),…,uT(t+(N-1)h|t)],將目標函數寫為如下緊湊形式:
(11)

由(4)式、(9)式可得到終端等式約為
(12)
式中:M(N,h)為關于N、h的矩陣函數。

(13)
對v和λ求偏導,根據泛函最優的必要條件有(14)式[16]成立:
(14)
(14)式變換為如下形式:
(15)
若拉格朗日矩陣(15)式存在逆矩陣[17]
(16)
式中:E=H-1-H-1M(MTH-1M)-1MTH-1;F=H-1M(MTH-1M)-1;D=-(MTH-1M)-1。則可獲得如下解析形式的最優控制序列:

(17)
由于預測控制只選取當前的控制序列,控制輸入為
(18)
式中:Km=[I2×2,02×2,…,02×2]。

2.3 解析預測控制性能和穩定性分析
2.2節提出的解析預測控制與顯式預測控制,以及文獻[17]的離散預測控制相比較,具有如下特點:
1)多體船的整個航行包絡空間較大,若采用顯示預測控制,離線需要劃分很多區域,進而導致在線增益調度花費很多時間。本文提出的解析預測控制律(17)式不需要在線調度參數,減少了區域搜索時間。
2)預測模型(8)式是連續的,時間步長h可以動態調整,具有自適應性,h越小預測模型越準確,控制性能越好。基于離散模型的解析預測控制結構是固定的[18],不具有自適應性,沒有考慮終端等式約束x(t+T|t)=0的情況,穩定性通過調節預測時域和控制時域得到保證。
為分析控制律(17)式作用下閉環系統的穩定性,本節分為兩個步驟證明:
1)對于無干擾系統的有限時域最優控制可寫為
(19)
文獻[19]給出了對于任意控制時域T的穩定控制律,即
(20)


(21)
Po(t+T,t+T)=0.
(22)
采用控制律(20)式系統是一致漸近穩定的,并且存在Lyapunov函數:
V=xTFo(t)x,
(23)

(24)

2)在最優控制(20)式下的漸近穩定基礎上,分析控制律(17)式作用下的閉環系統穩定性為

(25)
由(17)式可知



(26)
對于(26)式中的第1項,文獻[15]給出證明:
u(t)-u*(t)=[K-K*]x(t)=
hΩ(t;N,h)x(t),
(27)
式中:

(28)
由(26)式可知,對于任意的正定QF>I4×4,總能找到h=T/N,使得
xT{[K-K*(t)]TBTFo+
FoB[K-K*(t)]+I4×4-QF}x=
xT{h[ΩT(t;N,h)BTFo+FoBΩ(t;N,h)]+
I4×4-QF}xT<0.
(29)

(30)

3 仿真分析
3.1 海浪干擾仿真
高速多體船在4級海浪中以40 kn的航速行駛,遭遇頻率取3.25 rad/s,遭遇角為180°迎浪航行,有義波高為2 m.海浪干擾選用國際拖曳水池會議(ITTC)單參數譜作為海浪仿真譜函數[20-21],即
(31)
式中:ω為海浪主導頻率;hw為海浪有義波高;g為重力加速度。高速多體船主要包括雙體船和三體船兩類,仿真中以三體船為例進行研究。三體船在航行時,對水線下部分進行切片計算可以得到船舶受到的海浪干擾力和力矩。求解三體船在不同頻率點下的海浪干擾力和干擾力矩分別為

(32)
式中:ζ為海浪波高;L為船體長度;n為波數;d為船舶吃水;s為復變量;b為船寬;U為船速;ωe為海浪的遭遇頻率。由(32)式可得到多體船受到升沉力和縱搖力矩譜HF(ωe,β)和|HM(ωe,β)|。令ΦF(ωe,β)為干擾力功率譜,ΦM(ωe,β)為干擾力矩功率譜,Φζ(ωe,β)為遭遇海浪功率譜。根據
ΦF(ωe,β)=|HF(ωe,β)|2Φζ(ωe,β),
ΦM(ωe,β)=|HM(ωe,β)|2Φζ(ωe,β).
(33)
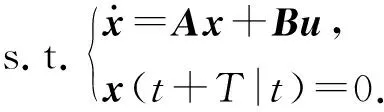
對(33)式進行逆傅里葉變換,采用數據擬合和疊加的方法,得到隨機海浪作用于三體船的干擾力和干擾力矩,分別如圖2、圖3所示。
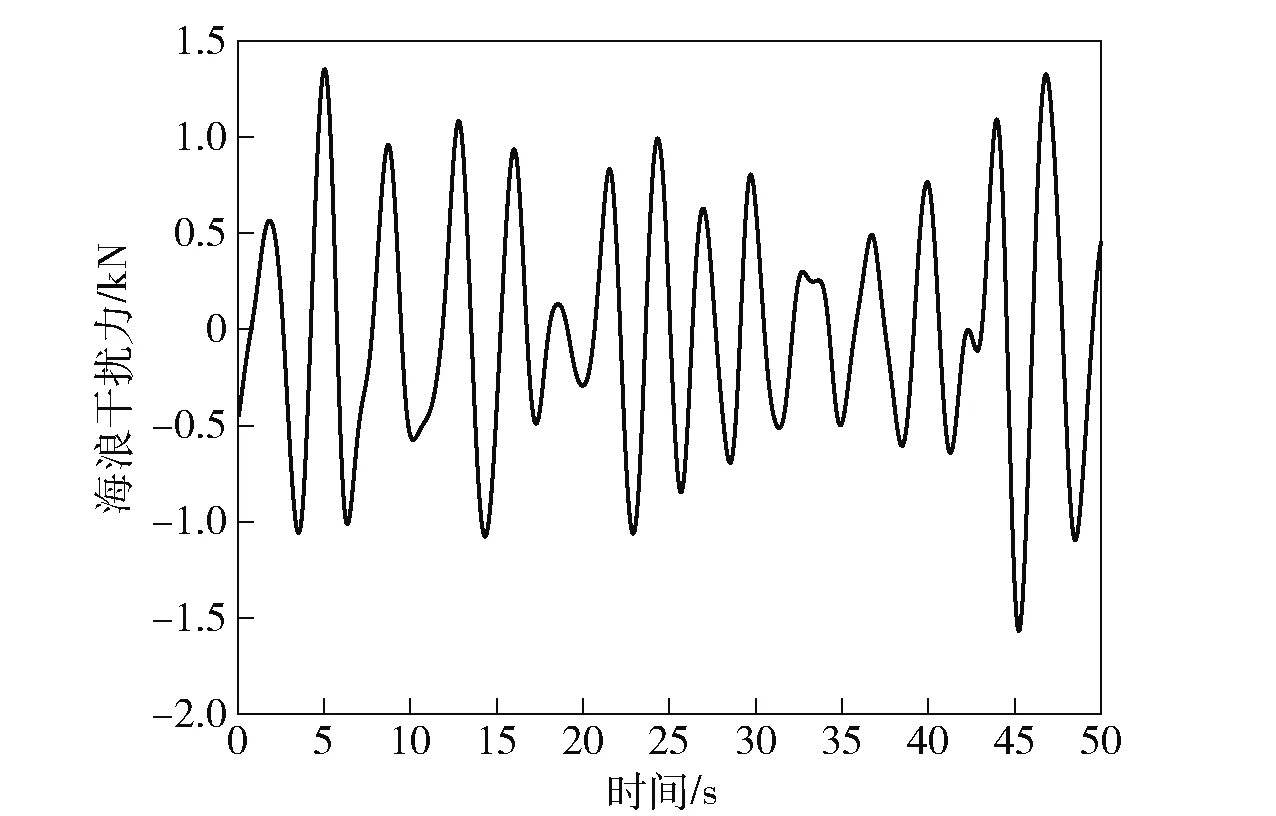
圖2 海浪干擾力Fig.2 Wave disturbance force
圖3 海浪干擾力矩Fig.3 Wave disturbance moment
3.2 解析預測控制性能仿真
考慮多體船航速影響,依據切片理論對多體船運動參數求解,可以得到某三體船在某特定頻率下的一組三體船參數如下:A=

本文所提解析預測控制律結構與預測步數N有關。預測步數越多,控制性能越好,但是控制器結構復雜,實際中一般選為3或者4,這里N取4.當N固定時,時間步長h的選取將直接決定預測模型的精確性,影響控制效果。當時間步長h分別為0.4 s、0.5 s和0.6 s時仿真結果如圖4和圖5所示。從圖4和圖5中可以看出,時間步長h越小,升沉和縱搖減搖性能越好,其原因是h越小、預測模型越準確,控制量變大。實際中T型翼和壓浪板的輸入攻角有嚴格幅值約束,容易出現飽和現象,因此步長h需要折中選擇,這里h=0.5 s.

圖4 不同時間步長的三體船升沉運動Fig.4 Heaving motion of triple-hulled vessel at different time steps

圖5 不同時間步長的三體船縱搖運動Fig.5 Pitching motion of triple-hulled vessel at different time steps
3.3 減搖控制性能對比
分別進行沒有控制、文獻[9]的廣義預測控制、文獻[12]的解析預測控制、基于誤差反饋校正的解析預測控制4種情況下的多體船垂向運動對比(見圖6~圖9),減搖數據如表1所示,其中3種預測控制律的加權矩陣都選為Q=diag(1,1,1,1),R=diag(1,1),預測步數皆取為4.

圖6 三體船的升沉運動Fig.6 Heaving motion of triple-hulled vessel
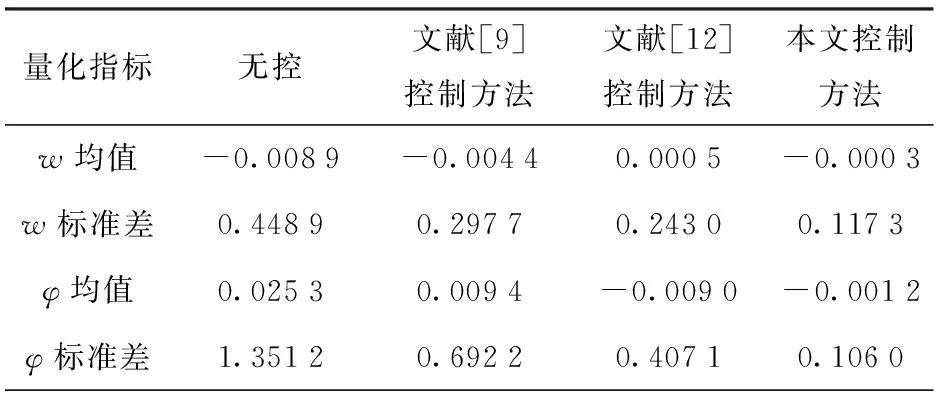
表1 三體船升沉和縱搖運動的減搖仿真
圖6和圖7所示為無控和考慮誤差反饋校正的解析預測控制減搖控制對比,從中可以看出升沉和縱搖運動幅度明顯減少,升沉運動量減少60%左右,縱搖運動量減少80%左右,表明解析連續預測控制是有效的,不需要傳統預測控制的在線優化。
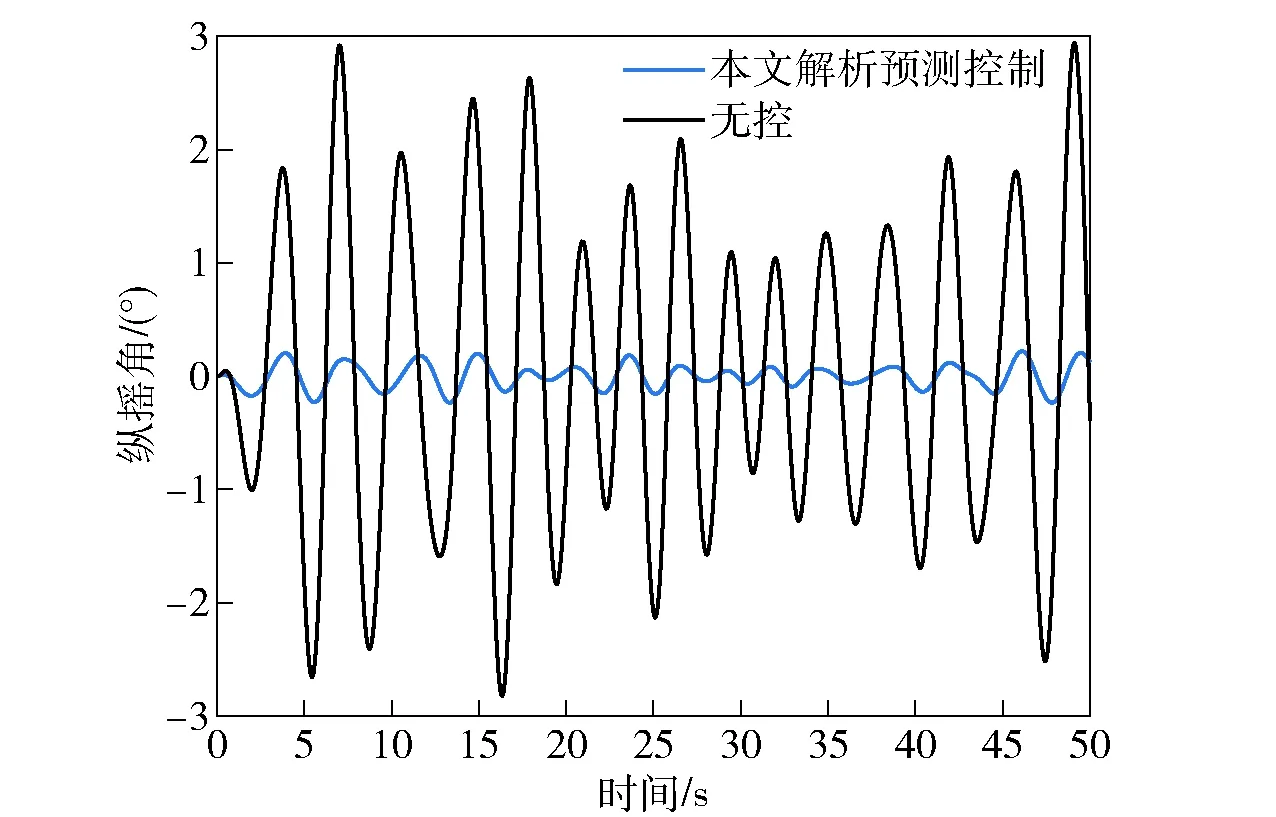
圖7 三體船的縱搖運動Fig.7 Pitching motion of triple-hulled vessel
將文獻[9]的廣義預測控制與文獻[12]的解析預測控制進行對比,如圖8和圖9所示。從圖8和圖9中可以看出,文獻[12]的解析預測控制減搖效果更好,這是因為相對于文獻[9],該方法明確考慮了終端等式約束,提高了控制性能。但是,由于其預測模型沒有考慮隨機干擾和參數不確性,減搖性能還沒有達到理想效果。圖10和圖11所示為文獻[12]和本文所提基于誤差反饋校正解析預測控制減搖控制的對比,從中可以看出基于反饋校正的解析預測控制進一步減少升沉和縱搖運動幅度,對海浪干擾具有更強的抑制能力,其原因是誤差反饋校正提高預測模型的精度,減搖性能變好。

圖8 不同控制律的三體船升沉運動Fig.8 Heaving motions of triple-hulled vessel with different control methods
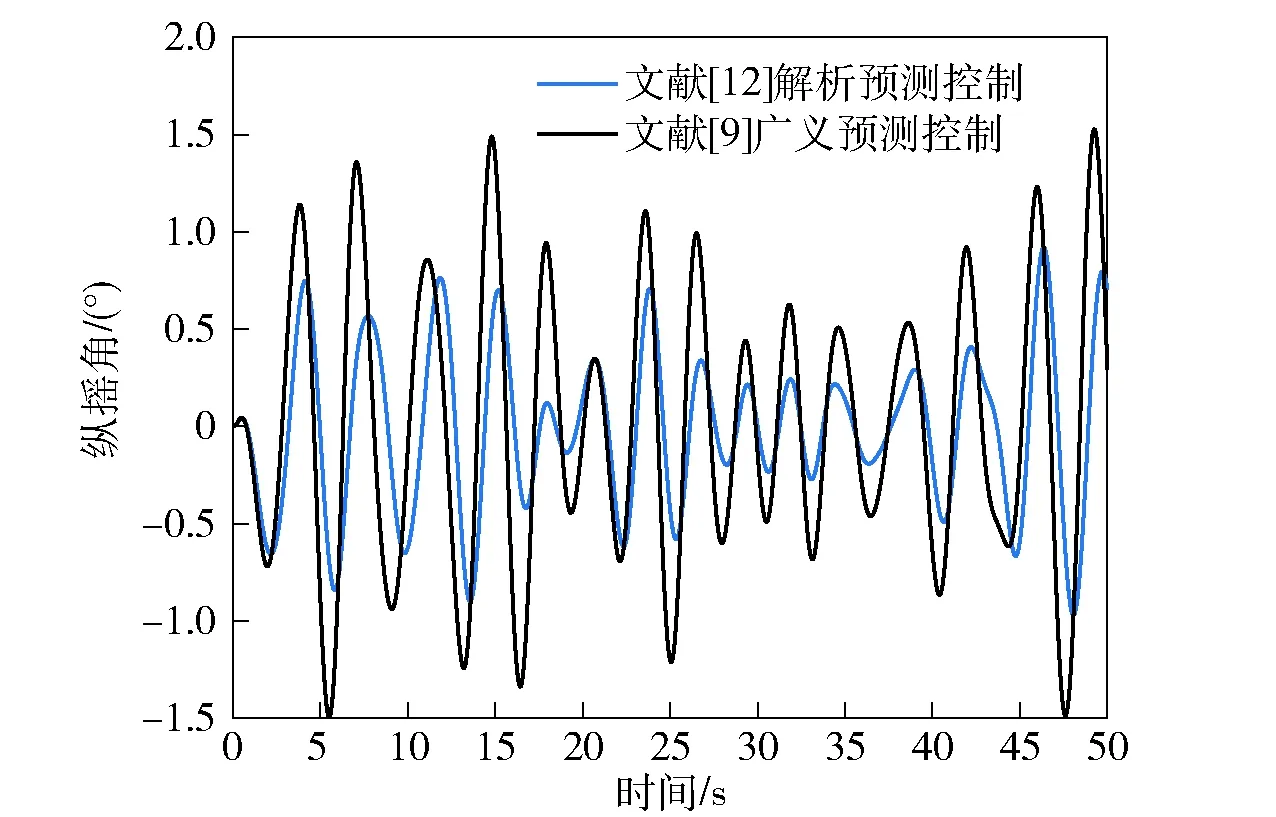
圖9 不同控制律的三體船縱搖運動Fig.9 Pitching motions of triple-hulled vessel with different control methods
4 實驗驗證
設計一艘小型的實驗三體船,如圖12所示。三體船船體材料選為玻璃鋼,因為玻璃鋼具有耐腐蝕、質量小、機械強度高等優良特性。甲板部分材料選為鋁板,主要避免焊接時的變形。工控機和嵌入式底層控制板放在三體船艦島艙室,三體船內部為相關傳感器、電源以及相關線路,三體船外形尺寸參數如表2所示。三體船的減搖附件選型為T型翼和壓浪板,在船艏底部安裝T型翼,用來降低多體船的垂向運動幅度,在船尾安裝壓浪板,用來減少航行阻力。T型翼和壓浪板為液壓驅動(見圖12),優化后的附體參數見文獻[9]。

圖12 裝有T型翼和壓浪板的三體船Fig.12 Triple-hulled vessel with T-foil and flap
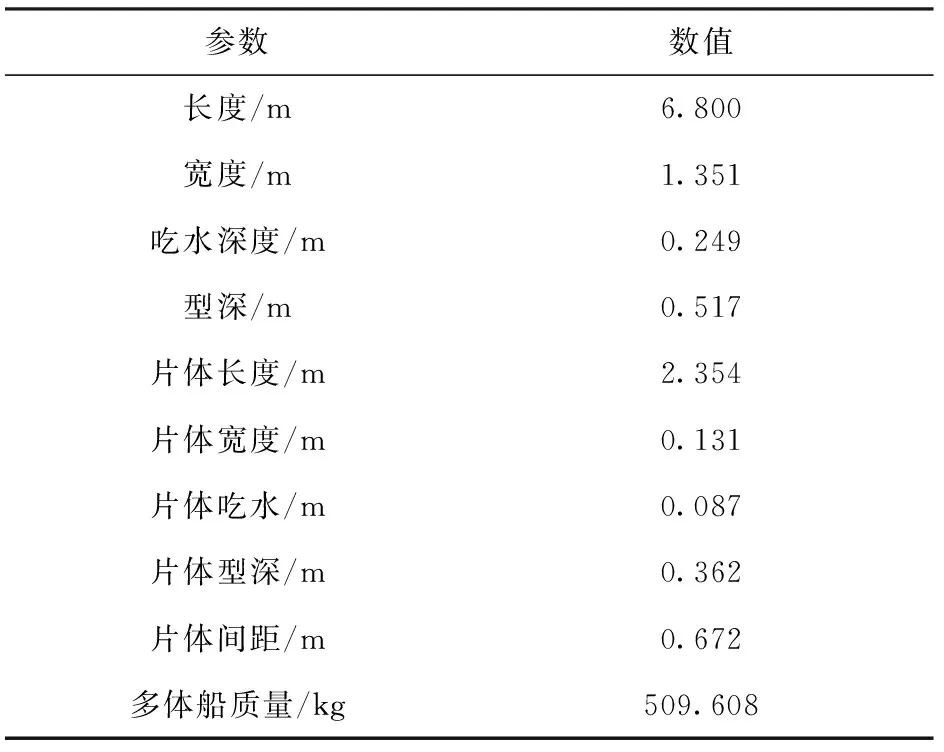
表2 三體船參數
實驗三體船的控制系統上位機選用工控機,工作平臺采用Windows XP系統和VC++6.0,實現三體船運動軌跡顯示和設置工作參數,主要包括人工操作界面、串口通訊模塊、各傳感器檢測參數、升沉和縱搖顯示界面。實驗三體船的底層減搖穩定控制系統選用 ARM7 架構的 LPC2294 芯片作為主控芯片,內嵌 UC/OS-II 操作系統,微處理器接收升沉傳感器和縱搖傳感器量測的多體船運動信息,采用本文提出的解析預測控制算法實時解算T型翼和壓浪板的控制量,驅動液壓缸執行機構,構成閉環減搖控制系統。三體船升沉位移和縱搖角傳感器的數據采用串行通信方式與工控機通訊,工控機對傳送來的數據進行存儲和顯示,便于實時監測和控制。
根據Froude縮放定律,實驗中采用10∶1的船舶模型,4級海況下波高為0.2 m,周期為2.06 s. 圖13所示為多體船實驗場景,船模航行速度為6.507 3 m/s. 實驗結果如圖14和圖15所示,從中可見在本文所提預測控制下升沉和縱搖運動幅度明顯下降,其中升沉運動幅度下降了40%左右,縱搖運動幅度下降了70%左右(0~70 s),減搖效果與仿真數據相比有一定差距。這是因為實驗三體船的水動力學參數與仿真模型數據有一定差距,并且升沉/縱搖傳感信號有較大的量測噪聲影響減搖效果,后續將對信號濾波和減搖的魯棒性進一步研究。

圖13 實驗驗證Fig.13 Experimental verification
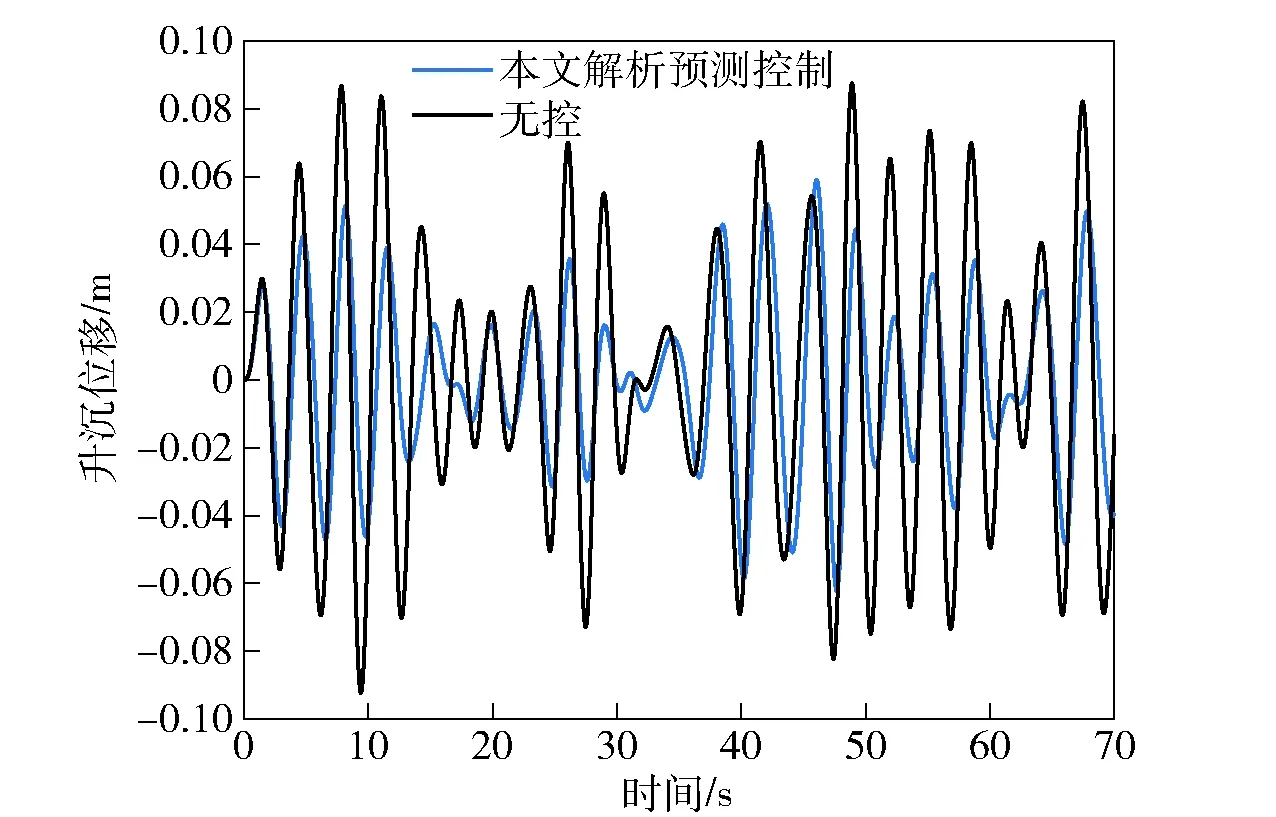
圖14 實驗三體船的升沉運動Fig.14 Heaving motion of triple-hulled vessel

圖15 實驗三體船的縱搖運動Fig.15 Pitching motion of triple-hulled vessel
5 結論
本文針對高速多體船在惡劣海況下縱搖和升沉運動幅度過大的特點,提出了計算量少的的解析預測控制減搖方法。得出主要結論如下:
1)基于誤差反饋校正和1階歐拉模型預測升沉和縱搖運動狀態,提高預測模型精度;采用數值積分和最優二次序列規劃理論獲得多體船減搖的解析預測控制律,減少預測控制在線優化的復雜性。
2)基于Lyapunov穩定性理論分析閉環系統的一致有界性,并與廣義預測控制等其他方法進行了性能對比,通過仿真和實驗驗證了所提方法的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19