基于改進樽海鞘群算法的磁流變減擺控制優化
2021-11-02 03:11:58王璐琦祝世興
液壓與氣動 2021年10期
關鍵詞:優化
王 博,王璐琦,祝世興
(1.中國民航大學 工程技術訓練中心,天津 300300; 2.中國民航大學 航空工程學院,天津 300300)
引言
擺振是存在于飛機起落架的有害振動現象[1]。磁流變(Magnetorheological,MR)阻尼器通過改變外加電場調整輸出阻尼,具有能耗低、響應快、阻尼連續可控等優點,在起落架減擺領域具有較大應用前景[2-3]。決定MR阻尼器減擺性能的關鍵是根據機輪擺振狀態設置合適的控制電流。PID控制器由于結構簡單、可靠性高,被廣泛應用于磁流變阻尼器的控制,科學合理的設定控制器參數對于MR阻尼器的減擺效果尤為重要[4-5]。
控制參數工程整定方法繁瑣且準確性低,近年來隨著智能算法的興起,眾多學者利用智能算法優化調整磁流變阻尼器的控制參數[6]。GAD S等[7]利用遺傳算法(Genetic Algorithm,GA)整定汽車座椅磁流變減振系統的PID參數,系統設計過程中利用GA實現控制參數尋優,簡化整定過程,減小人為因素對參數準確性影響,提高了控制精度。METERED H等[8]為提高汽車磁流變半主動懸架的舒適性和穩定性,通過粒子群算法(Particle Swarm Optimization,PSO)搜索控制器的最優參數,并驗證了方法的可行性。TALIB M H等[9]提出一種高級螢火蟲算法(Advanced Firefly Algorithm,AFA),用以優化磁流變懸架系統的控制參數,改善了系統的減振性能。但GA,PSO,AFA等經典算法存在復雜度高、收斂速度慢、全局搜索能力差、參數多且調整過程主觀性強等問題,會增加整定過程耗時,降低參數精度和優化效率,并最終影響系統控制效果。
樽海鞘群算法(Salp Swarm Algorithm,SSA)是MIRJALILI S等[10]提出的一種新型智能優化算法,采用鏈式尋優結構,群體鏈前部和后部的個體采取不同進化方式。SSA由于復雜度低,靈活性強,且基本無需參數設置,最大程度減少了主觀因素干擾,在控制參數優化領域具有較好的應用前景[11-12]。丁力等[13]、HASANEN H 等[14]分別應用SSA優化四旋翼飛行器的姿態控制參數及電力系統負荷頻率控制參數,實驗表明,優化后的控制器具有更好的控制精度。但在SSA種群更新過程中,由于群體鏈前部的領導者主要依靠精英個體引導,種群進化多樣性不足,容易陷入局部最優;而群體鏈后部的跟隨者缺少優質個體指引,進化過于盲目,易導致算法優化效率降低,直接影響SSA的參數優化效果。
因此,本研究對SSA采取兩項改進措施:通過精英個體雜交變異策略實現領導者位置更新,增強全局搜索能力;跟隨個體更新過程中加入自適應差分變異操作,提高優化效率。進而,提出改進樽海鞘群算法(Modified Salp Swarm Algorithm,MSSA),并以起落架擺振絕對誤差時間乘積積分和擺振第3周期最大位移與時間積作為適應度函數,將MSSA應用于磁流變減擺系統控制參數優化問題。通過與SSA,AFA,PSO,GA 4種算法對比實驗,表明MSSA算法的優化效率及精度更高,魯棒性更強,經MSSA優化后的MR減擺系統擺振控制效果更好。
1 樽海鞘群算法
SSA通過模擬樽海鞘在海洋中群體鏈式運動行為搜索問題的最優解[15],算法將種群個體分為領導者和跟隨者,兩類個體采取不同運動更新方式:領導者位于群體鏈前部,根據精英個體位置引導種群移動;跟隨者位于群體鏈后部,相互跟隨運動[16]。SSA實現過程如下:

(2) 計算所有個體適應度值,根據適應度進行個體排序,選取當前最優個體作為精英個體G(t);
(3) 選擇種群前N/2個體作為領導者,即i≤N/2時根據式(1)更新領導個體位置:
(1)
c1=2e-(4t/tmax)2
(2)
(4) 選擇種群后N/2個體作為跟隨者,即i>N/2時根據式(3)更新跟隨個體位置:
(3)
(5) 更新迭代次數t,判斷是否達到最大迭代次數,若未達到跳轉至步驟(2),否則輸出精英個體位置G(t),即為全局最優解。
2 樽海鞘群算法改進
針對SSA的局部最優和優化效率低問題,本研究在SSA的領導者和跟隨者更新過程中分別采取精英個體雜交變異、自適應差分變異兩項策略改進算法性能,以增強全局搜索能力,改善優化效率。
2.1 精英個體雜交變異策略

(4)

K=e-(fLr-fT/fG-fT)
(5)
式中,fLr為XLr(t)的適應度;fG,fT分別為當前種群個體適應度的最優及最差值;fLr與fG數值越接近表明XLr(t)的質量越高,此時K數值較大,進化信息中XLr(t)所占比例較高,有利于增加優質進化信息引導個體向更優位置移動。
為直觀說明精英個體雜交變異策略對局部最優問題的改善效果,本研究以文獻[19]中多峰函數Alpine為例,分別應用SSA和基于精英個體雜交變異策略的SSA對其連續優化50次,繪制平均收斂曲線,同時選取收斂精度最高的優化過程記錄精英個體運動軌跡。測試過程中,算法參數設置一致,tmax=100,N=100,D=3。圖1所示為兩種算法平均收斂曲線,為便于觀察,縱坐標對適應度均值favr取10為底的對數。可以看出,SSA的優化初期、末期由于陷入局部極值,優化趨于停滯狀態,經過約20次迭代才跳出局部最優;而基于EHM的SSA優化過程中能夠快速跳出局部極值區域并保持較高的收斂速度,收斂精度明顯優于SSA。通過圖2所示精英個體運動軌跡對比,進一步可知2種算法初始精英個體位置基本一致的情況下,基于EHM的SSA種群個體搜索范圍更廣,基本不會陷入局部極值區域,能夠快速收斂到理想目標個體鄰域且與理想值更接近。上述實驗對比表明,精英個體雜交變異能夠避免單一精英個體對種群進化的誤導,提高進化多樣性,增強全局搜索能力。
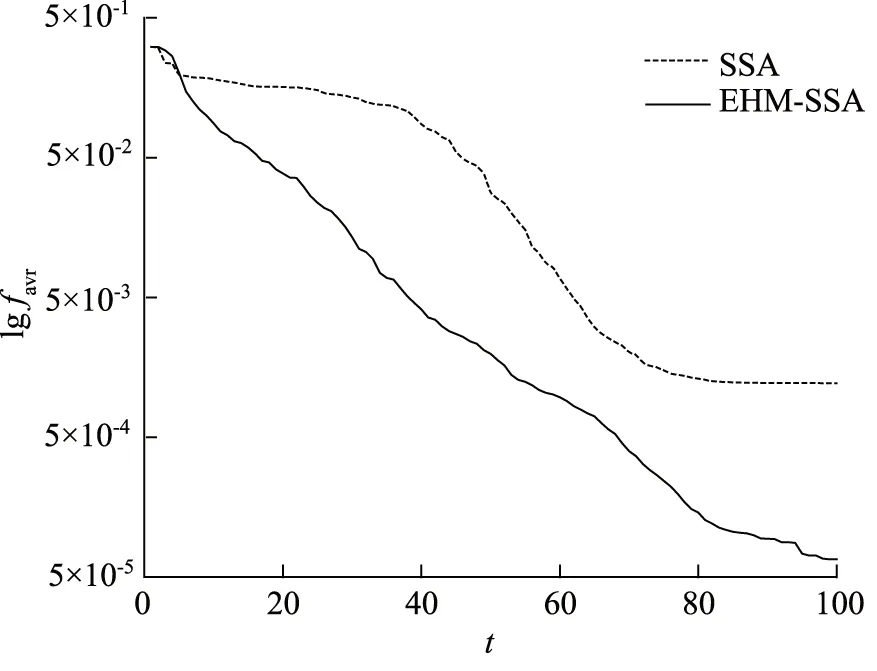
圖1 Alpine函數平均收斂曲線Fig.1 Average convergence curve of Alpine function
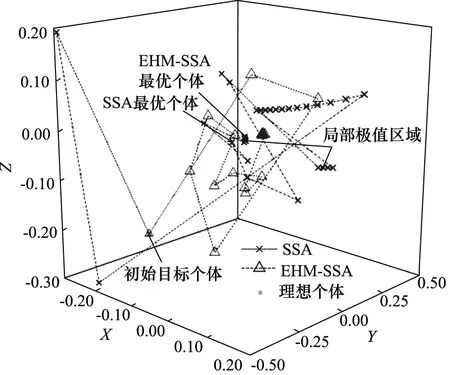
圖2 精英個體進化軌跡Fig.2 Evolutionary trajectories of elite individuals
2.2 自適應差分變異策略
SSA算法只是機械的將位于樽海鞘鏈后部的個體作為跟隨個體,其更新只依賴于當前位置以及與之相鄰的樽海鞘位置。采用此更新方式,適應度較好的跟隨者由于缺少目標位置信息,無法及時收斂到全局最優解,而適應度差的跟隨者缺少與其他個體的信息交換,不能充分地進行全局搜索,最終易導致算法收斂速度減小,優化效率下降。針對此問題,本研究提出跟隨者的自適應差分變異策略,將適應度優于當前均值的跟隨者作為優質個體,其余跟隨者為非優質個體,對于優質個體利用最優個體與跟隨者進行差分變異完成更新操作;非優質個體則隨機選取種群個體與跟隨者進行差分變異實現個體更新。改進后的跟隨者(i>N/2)更新公式如下:
(6)
3 MSSA的MR減擺控制參數優化
3.1 起落架MR減擺控制數學模型
擺振是飛機滑跑過程中,受起落架扭轉力、輪胎彈性變形和輪胎-跑道道面耦合作用影響,前起落架機輪偏離中心位置的周期性往復運動[20]。圖3所示為安裝磁流變減擺器的某型無人機前起落架結構模型。
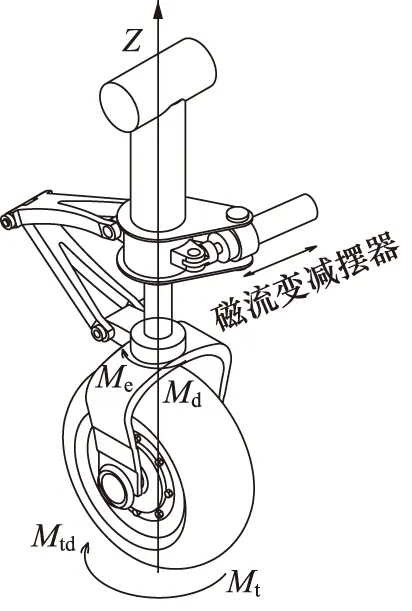
圖3 飛機前起落架結構模型Fig.3 Structural model of aircraft nose landing gear
通過受力分析,可建立輪胎動力學方程和起落架扭轉力學方程,分別如式(7)、式(8)所示,二者共同構成起落架磁流變減擺數學模型[21]:
(7)
(8)
式中,s為機輪觸地點側向位移;l為機輪觸地長度;σ為輪胎側向松弛長度;V為飛機滑跑速度;φ為機輪的擺動角度;θ為輪胎側滑角;Iz為支柱的慣性矩;Me為扭轉剛度引起的線性彈性力矩;Md為支柱扭轉阻尼力矩;Mt,Mtd分別為輪胎的側向變形力矩和阻尼力矩;Mmd為磁流變減擺阻尼力矩,如式(9)~式(13)所示:
Me(φ)=Cφ
(9)
(10)
Mt(θ)=Mz(θ)-eFs(θ)
(11)
(12)
Mmd=fmr*d
(13)
式中,C為起落架支柱扭轉剛度;ks為支柱扭轉阻尼系數;kt為機輪胎面阻尼系數;e為機輪的有效穩定距;d為減擺力臂長度;fmr為MR減擺器的輸出阻尼力,主要與外加電流相關,采用文獻[22]中基于正弦擬合建立的磁流變阻尼器力學模型表示;Fs(θ)代表機輪的側偏力,Mz代表機輪回正力矩,分別表示如下:

(14)
(15)
式中,CM,CF分別表示機輪的回正力矩系數和側偏力系數;θam,θlm分別表示機輪的自回正臨界側滑角和側偏力的臨界角;Fz為垂直載荷。
由起落架磁流變減擺模型可知,MR減擺器可通過調節減擺器線圈回路電流改變減擺阻尼以控制擺振。為使MR減擺器有效減小擺振,本研究采用PID控制策略。將T時刻機輪觸地點側向位移s(T)作為系統反饋,以此時減擺器線圈回路電流I(T)為被控對象,根據系統控制模型調節線圈回路電流,進而調整MR減擺器的輸出阻尼,使機輪的擺動幅度最小,實現減擺控制。系統控制模型可表示為:
(16)
式中,Kp—— 比例調節系數
Ki—— 積分調節系數
Kd—— 微分調節系數
合理設定這3個參數是系統獲得良好控制性能的關鍵。
3.2 優化目標
為提高磁流變減擺控制參數的準確性,改善控制效果,簡化控制參數的調整過程,本研究利用改進后的樽海鞘群算法優化控制器的3個參數Kp,Ki,Kd。將一組控制參數作為一個種群個體,利用適應度評估不同參數組合下控制器的減擺效果,通過算法的反復迭代搜索適應度值最優的參數,以期達到最優減擺控制。
根據《飛機前起落架防擺設計要求》,飛機前起落架擺振應在3個周期內進入臨界穩定狀態,擺幅至少衰減到最大初始振動幅度的1/4。磁流變減擺控制的最終目標是盡可能減小起落架擺振幅度,并在規定時間內將擺幅收斂到擺振臨界穩定域,使起落架逐漸趨于穩定。因此本研究綜合考慮起落架的穩態誤差、擺振第3周期振幅衰減情況和系統調節時間,計算時間側向位移乘積的積分(即ITAE指標)以及擺動發生第3周期最大位移與時間積,將二者之和作為適應度函數,其公式如下:
(17)

3.3 MSSA的控制參數優化步驟
MSSA的磁流變減擺控制參數優化流程如圖4所示,具體步驟如下:
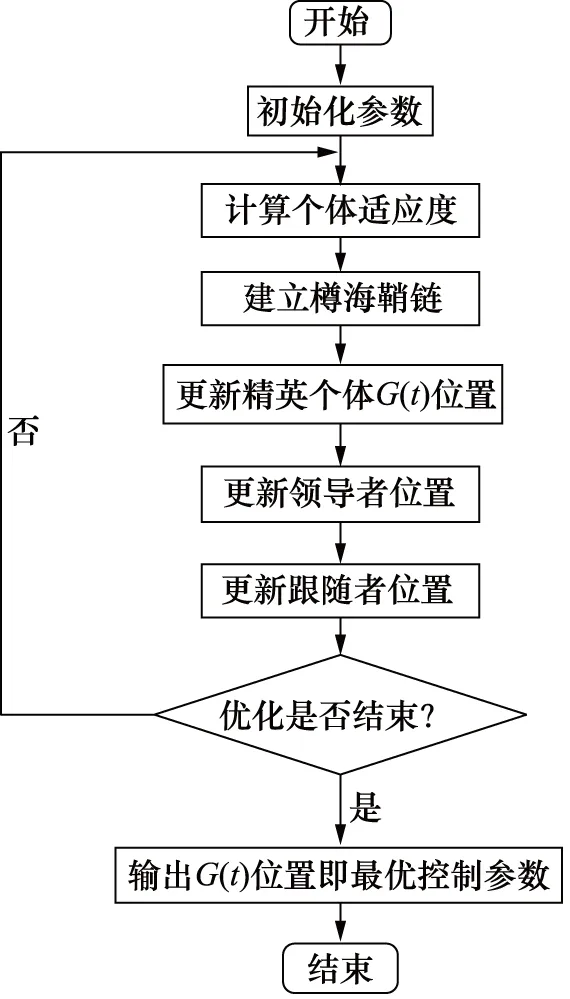
圖4 基于MSSA的MR減擺控制參數優化流程圖Fig.4 Flow chart for optimization of MR shimmy control parameters based on MSSA
(1) 初始化參數,樽海鞘個體的初始位置,最大迭代次數tmax,種群規模N,個體維度D=3;
(2) 計算個體適應度,分別將樽海鞘個體位置賦值控制器,運行磁流變減擺控制模型,依式(17)計算所有個體的適應度;
(3) 建立樽海鞘鏈,按照適應度值優劣,降序排序種群個體建立樽海鞘鏈,前半部分個體為領導者,后半部分為跟隨者;
(4) 更新精英個體位置,選取當前適應度最優個體為精英個體G(t);
(5) 更新領導者位置,隨機選取領導個體XLr(t),依式(4)雜交變異更新領導者位置;
(6) 更新跟隨者位置,隨機選取種群個體Xr(t),根據式(6)更新跟隨者;
(7) 判定優化結束條件,若迭代次數已達到tmax,輸出精英個體位置即最優控制參數,否則返回步驟(2)。
4 仿真實驗及分析
4.1 基本優化性能測試
本研究為測試MSSA的有效性及穩定性,選取6個標準函數,以MATLAB 2016b為仿真環境進行實驗測試,并與SSA,AFA,PSO,GA對比實驗,所選測試函數如式(18)~式(23)所示,理論最優值均為0,其中F1~F3為單峰值函數,F4~F5為多峰值函數。實驗中5種算法的最大迭代次數tmax、種群規模N、個體維度D設置一致,分別為100, 100, 3;AFA算法的最大吸引度β0=1, 光吸收系數γ=2,步長因子α=0.2;PSO算法的個體學習因子c1=2,社會學習因子c2=2;GA算法的交叉概率pc=0.8,變異概率pm=0.15。5種算法針對每個函數分別獨立運行500次,統計實驗的均值、方差及最優值,如表1所示。
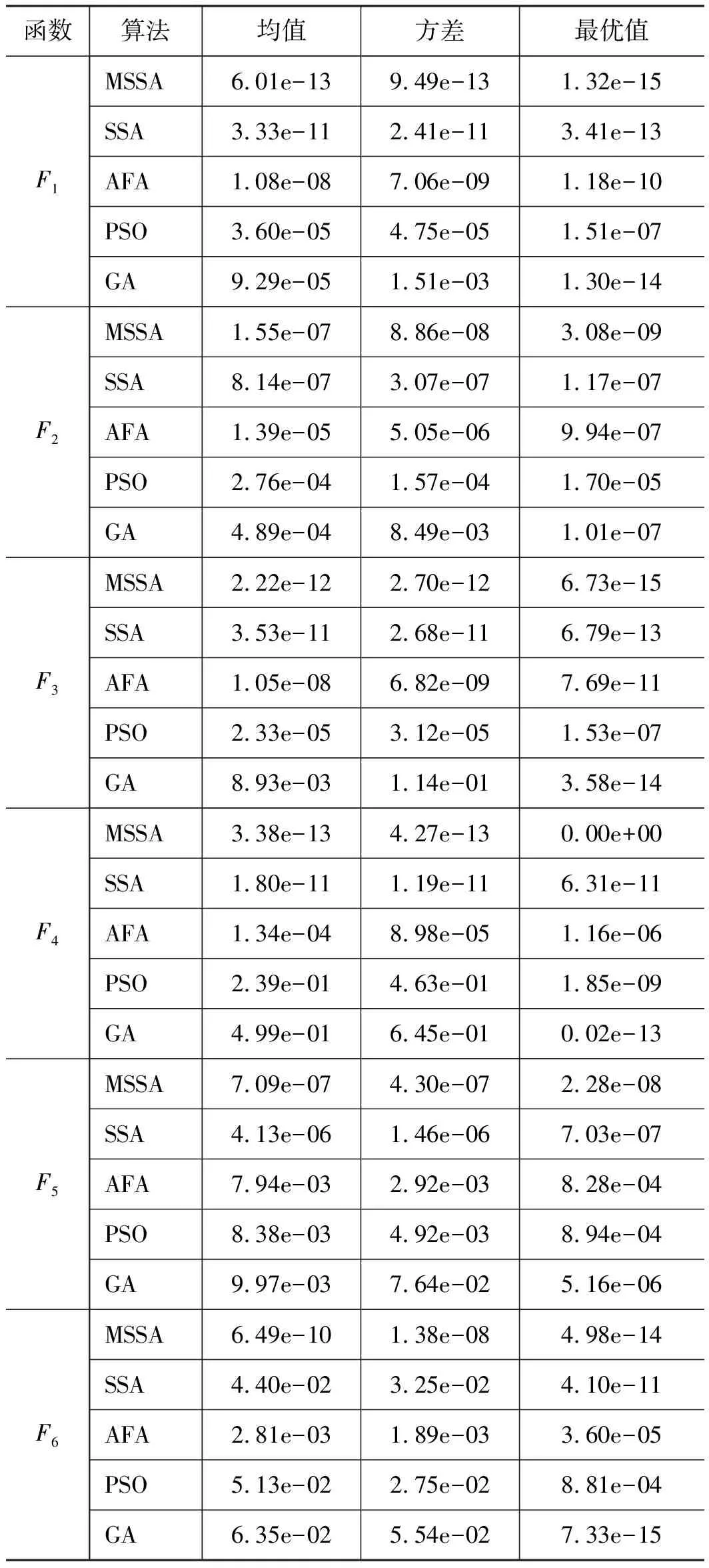
表1 測試函數優化結果Tab.1 Optimization results of test functions
(18)
(19)
(20)

-5.12≤xi≤5.12
(21)
(22)
-600≤xi≤600
(23)
通過分析表1數據可知,對于全部測試函數,MSSA的收斂精度和穩定性相較SSA有顯著提升,且明顯優于AFA,PSO,GA算法。特別是對于單峰值函數F1和多峰值函數F4,F6,MSSA的收斂精度比SSA分別提高了55,52,6×107倍以上,同時其在求解F4時取得了理論最優值,MSSA的收斂性能明顯優于4種對比算法。
為更直觀分析算法的優化過程,圖5顯示了實驗中5種算法針對每個測試函數的平均收斂曲線。可以看出,MSSA的收斂速度明顯快于4種對比算法,其可以利用每一次迭代尋找優質解,基本不會出現其他算法存在的收斂停滯情況,即使在迭代后期仍能夠不斷發現新的更優解。由此說明,MSSA通過自適應差分變異促進了種群個體根據自身特點進行充分的全局搜索和局部尋優,加快了收斂速度,使算法具有較高的優化效率,同時精英個體雜交變異策略也提高了全局搜索能力,避免了全局最優。綜上表明,MSSA采取的兩項改進措施有效,算法具有較高的收斂精度、優化效率和穩定性。
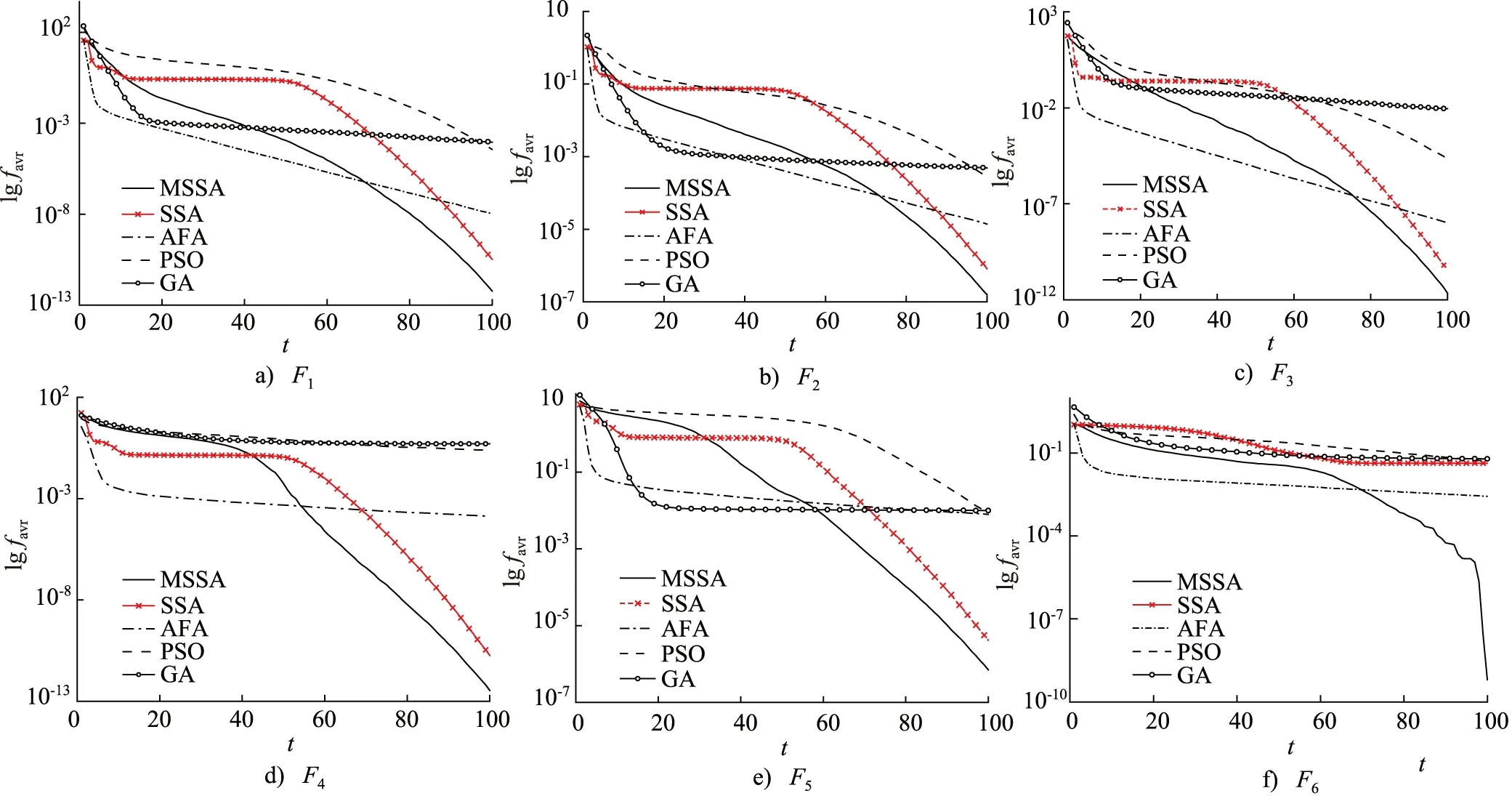
圖5 測試函數平均收斂曲線Fig.5 Average convergence curve of test functions
4.2 MR減擺控制優化仿真實驗
本研究為進一步驗證MSSA對于起落架MR減擺控制參數的優化效果,利用MATLAB 2016b/Simulink搭建減擺控制模型,分別應用MSSA,SSA,AFA,PSO,GA優化仿真,并在飛機滑跑速度為30, 50, 70 m/s 狀態下對比分析不同方法優化后的擺振控制性能。實驗中模型參數如表2所示,種群規模、個體維度、最大迭代次數分別為30,3,100,控制參數Kp,Ki,Kd取值范圍為[0, 100],其他參數與4.1節中一致。實驗計算機配置:CPU為Intel Xeon W-10885M(2.4 GHz);內存為32 GB;操作系統為Win10(X64)。5種優化方法分別獨立運行5次,對于每種算法分別選取1組適應度值最優的控制參數。
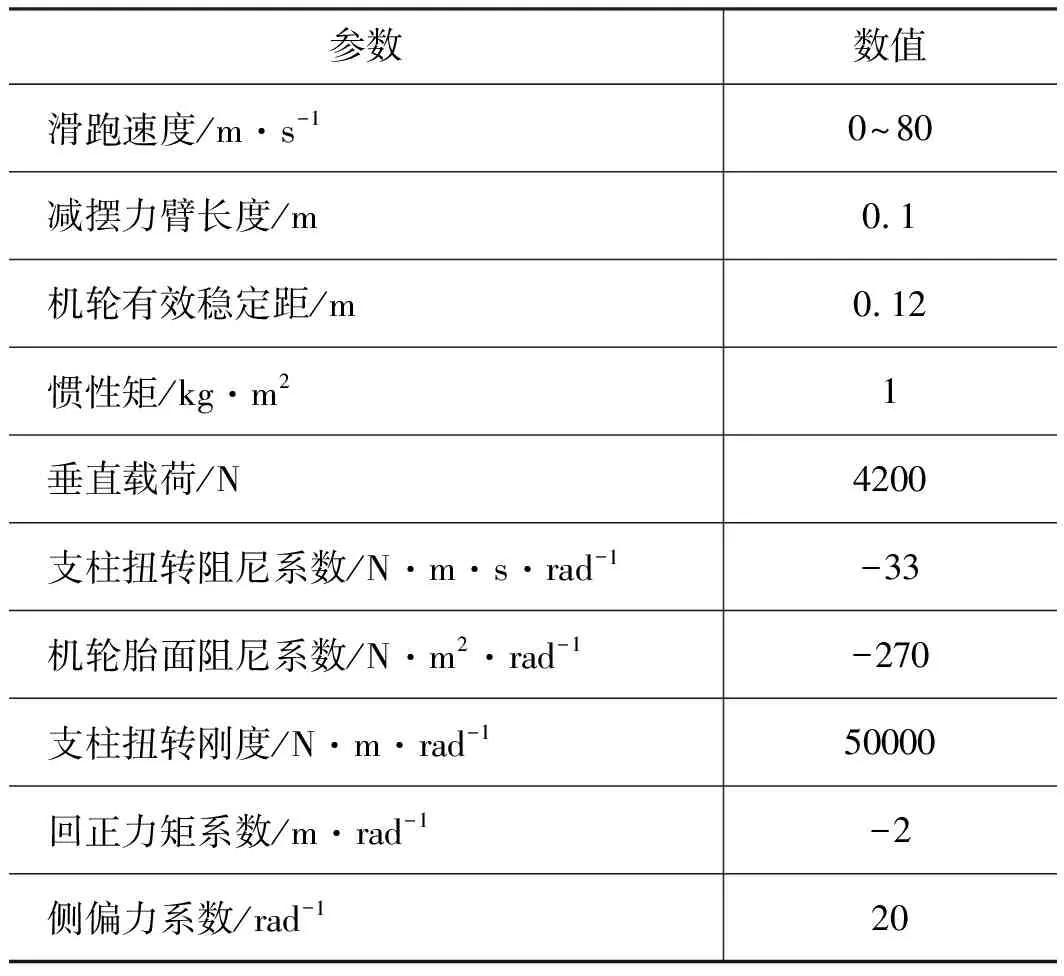
表2 模型參數Tab.2 Model parameters
表3為不同優化方法取得的最優適應度值及對應控制參數,5種方法迭代1次的平均運行時間如表4所示。可以看出,基于MSSA的優化方法獲得的適應度值最佳,運行時間與SSA基本一致,且比AFA,PSO,GA縮短了5%以上,說明MSSA采取的改進措施提高了優化性能,基本沒有增加SSA的時間復雜度,能夠以較低的時間成本高質量完成優化任務。
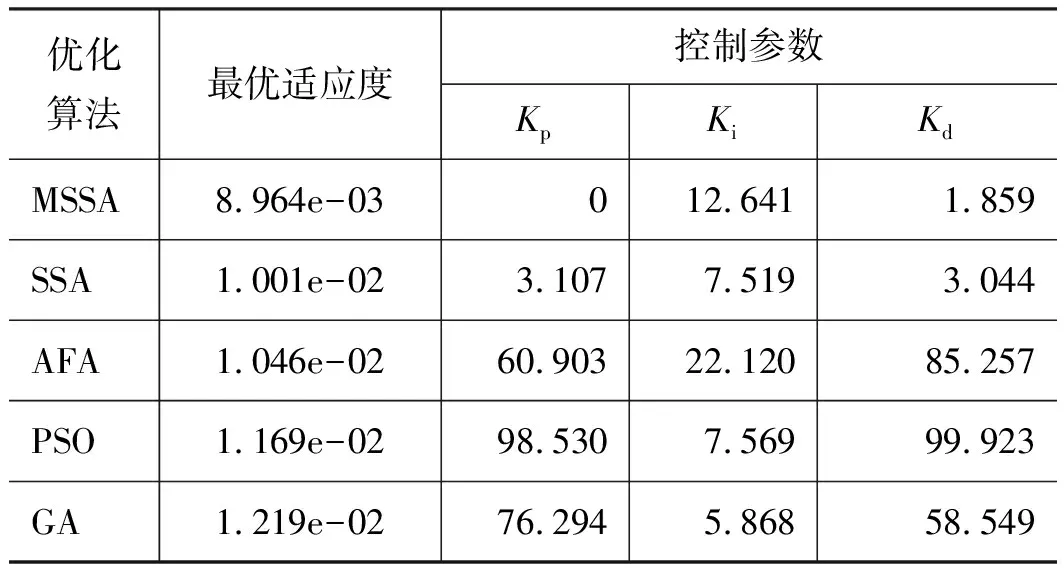
表3 最優適應度及優化后控制參數Tab.3 Optimal fitness and optimized control parameters

表4 算法平均運行時間Tab.4 Average running time of algorithms
機輪的平均側向位移及擺振收斂時間如表5所示,側向位移動態響應曲線如圖6所示。通過表5可知,在飛機3種不同滑跑工況下,MSSA優化的MR減擺控制系統相較其余4種算法優化的控制系統,機輪平均側向位移減小了4.24%~9.94%,擺振收斂時間縮短幅度可達33.19%,尤其是滑跑速度為50,70 m/s時,擺振收斂時間的改善幅度均達到30%以上。由圖6可以看出,MSSA優化的MR減擺控制系統全部滑跑工況下,側向位移都能夠在擺振第3個周期收斂到最大初始值的1/4并快速衰減趨于穩定,且在整個擺振控制周期內側向位移的幅度更小,而其他4種算法優化的減擺控制系統,滑跑速度為50,70 m/s時擺振無法在規定時間內收斂。由此表明,利用MSSA優化的MR減擺控制系統,減小了起落架擺振幅度,提高了擺振收斂速度,具有更好的擺振控制效果。
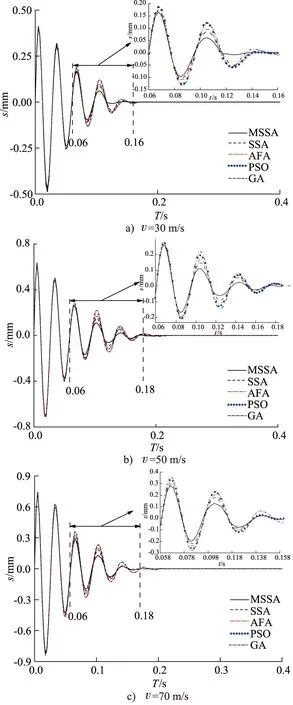
圖6 機輪側向位移動態響應曲線Fig.6 Dynamic response of lateral displacement
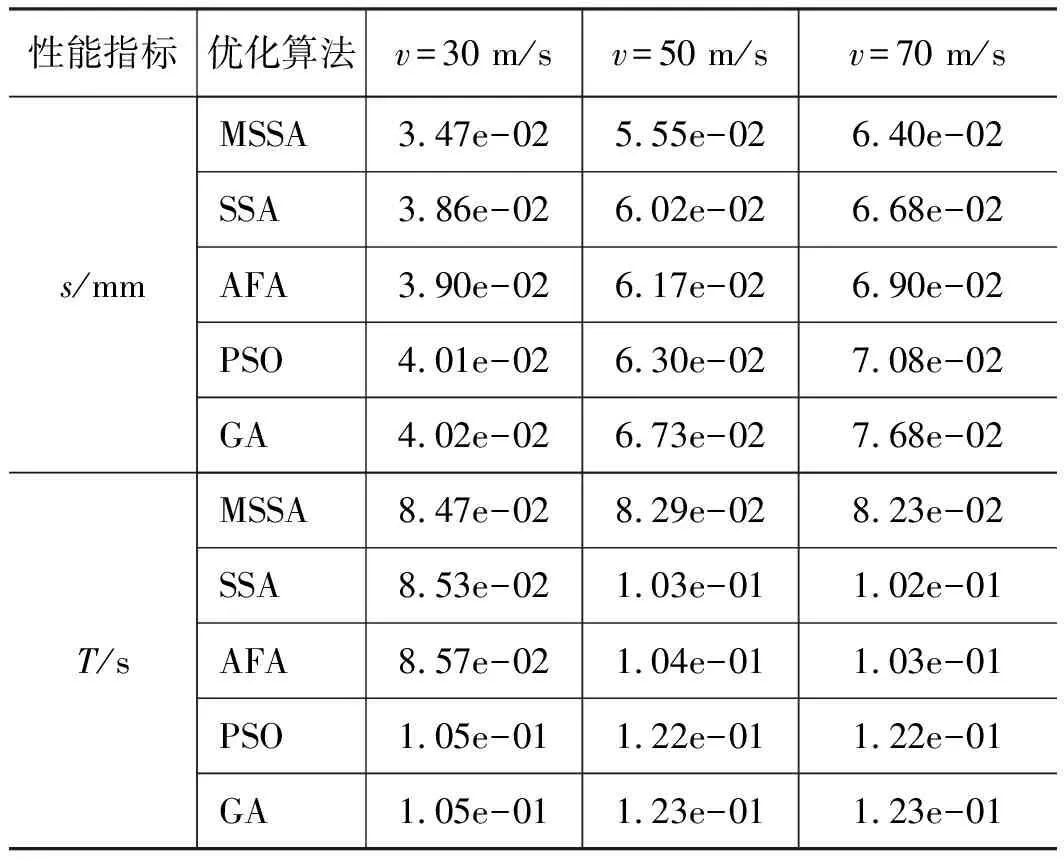
表5 減擺仿真實驗數據Tab.5 Simulation data of shimmy control
5 結論
本研究為解決磁流變減擺控制參數整定方法存在的問題,提出一種基于改進樽海鞘群算法以優化MR減擺控制參數。針對SSA算法,在領導者位置更新過程中加入精英個體雜交變異策略,擴大種群進化范圍,增強算法全局搜索能力;在跟隨者更新過程中引入兩種形式差分變異算子,根據個體適應度自適應選擇差分操作,加快收斂速度,提高算法優化效率。在此基礎上,按照擺振幅度最小、擺振穩定用時最短原則構建適應度函數,利用MSSA算法獲取MR減擺系統的最優控制參數。最后,將MSSA與SSA, AFA,PSO,GA對比測試,選取6個標準函數測試算法基本性能,實驗表明,MSSA的收斂精度和優化效率顯著提升,優化性能在所有測試算法中表現最佳。進一步的控制優化仿真實驗表明,基于MSSA的整定方法耗時較短,優化的MR減擺控制系統,相比其他4種方法擺幅更小,擺振收斂時間更短,減擺效果得到較大改善。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
