一款新型的電子換擋系統的設計
2021-11-03 11:10:47謝鈺敏,范漢茂,藍世華
汽車科技 2021年5期
謝鈺敏,范漢茂,藍世華
摘? 要:本文通過設計新型的電子換擋系統,采取擋位檢測與擋位控制分離的形式,以達到靈活地適配汽車換擋器的造型,使得換擋方便輕巧,耐用。加入負責安全的邏輯后能防止駕駛員誤操作,安全可靠。
關鍵詞: 電子換擋;TCU;換擋機構;MBD
中圖分類號:U463.6? ? ? 文獻標識碼:A? ? ?文章編號:1005-2550(2021)05-0117-05
The Design Of A New Electronic Gear Shift System
XIE Yu-min, FAN Han-mao, LAN Shi-hua
( Guangzhou Automobile Group Co., Ltd, Automotive Engineering Institute,
Guangzhou? 511434, China)
Abstract: Through the design of a new electronic shifter system, which takes the form as gear detection and control in separation, so that itcan flexibly adapt to the gearshiftermodelof car and shift easily and lightly. The shifter is more durable. After adding the safety logic, it can prevent the driver from improper operation, which is safe and reliable.
引? ? 言
傳統機械式換擋系統(如圖1所示)通常利用拉索接到變速器的擋位選擇開關,擋位由拉索行程決定,整個機構占據空間大,拉索需要穿過防火墻,內飾布置局限大。
1? ?系統設計與功能
本文設計的電子換擋系統如圖2所示,整個電子換擋系統包括:換擋檢測及顯示機構(換檔信號輸入)、方向盤按鍵信號采集(可選,高配使用)、換擋決策系統、換擋執行機構四大部分組成,每個部分由獨立的電路板承載其功能,可以提高系統的可重用性及擴展性。
通過四大部分的協作,可以實現以下功能:有效檢測、識別駕駛員的換擋意圖擋位;過濾不恰當的危險操作擋位,并安全地執行換擋操作;通過LED燈顯示車輛目前所處擋位;根據不同的駕駛模式進行對應的換擋控制;故障提示等。
2 系統工作原理
2.1? ?擋位檢測及顯示機構
擋位檢測及顯示機構為駕駛員與電子換擋系統的橋梁,駕駛員一般通過操作換擋器將自身意換擋圖傳導給換擋系統;換擋系統則通過駕駛員換擋意圖,當前擋位執行狀態,駕駛模式等進行綜合判斷及計算,對換擋機構進行驅動,并將當前執行的擋位及故障信息等通過顯示機構反饋給駕駛員。
為了適配多種造型的換擋器,本文設計的換擋系統,擋位檢測機構需要根據換擋器的外造型的不同及特點來進行擋位檢測的設計并獲取駕駛員的換檔意圖。以本項目為例,旋鈕式換擋器(如圖3所示),駕駛員通過轉動旋鈕換擋裝置進行換擋,在系統中則需要有角度傳感器對駕駛員旋轉擋位的角度進行檢測。
其中檢測原理如圖4所示,角度傳感器采集信號之后,對信號進行調理,并通過SENT信號發送給換擋決策系統,擋位決策系統可以將采集到的旋轉角度轉換成擋位信號。其他換擋形式的換擋器如按鍵式、擋桿式等,原理也是一致,只是將具體的擋位檢測傳感器的設計及安裝需要根據造型適配。
駕駛模式的切換:通過按鈕進行切換,目前實現ECO和SPORT模式。隨著自動駕駛、自動泊車的需求日益增多,需要預留自動駕駛的模式,使車輛進入自動駕駛控制的狀態,根據自動駕駛的需求切換對應的擋位。
2.2? ?方向盤按鍵信號采集
方向盤信號采集:屬于可選配置,方向撥片電阻網絡M+/M-通過檢測方向盤上的撥片開關,檢測出是M+還是M-的操作,通過電阻網絡轉換,將調理之后的檢測電壓傳給MCU,從而識別對擋位加減進行切換。
LED的顯示:可以根據不同的造型進行顯示的設計,主要用于執行擋位的顯示。
2.3? ?換擋決策系統概述
換擋決策系統是整個電子換擋器的核心部分,它通過采集擋位檢測傳感器的值、駕駛模式及方向盤信號采集,能有效檢測、識別駕駛員的意圖擋位;同時通過擋位執行機構的綜合判定,換擋決策機構可以過濾不恰當的危險操作擋位(例如在車速較高的情況下掛P/R擋),并安全地執行換擋操作,大大提高行車的安全性。
CAN網絡主要完成擋位信號,系統故障碼,駕駛模式等的信號好交互,并向診斷儀提供相應診斷服務。
硬線是擋位信號的硬線輸出,為了保證CAN網絡故障情況下,整車仍可以繼續工作。
EEPROM為非易失性存儲器,可以存儲當前故障、駕駛模式等關鍵信息,下電以后仍可保存,供下一次上電后調用。
2.4? ? 換擋器執行機構
換擋執行機構主要完成目前需要執行的擋位,經過擋位開關檢測、MCU過濾掉無效擋位之后,通過MCU控制電機執行換擋,如錯誤!未找到引用源。所示,其中:
電機驅動芯片負責提供拉索電機所需要的工作電壓和電流;
拉索電機通過旋轉運動對拉索進行操作,從而進行實際的擋位PRNDS5個擋位的切換,如圖5 所示;
雙路霍爾角度傳感器檢測電機轉動的位置,可以向MCU精確反饋目前電機運行位置,從而實現對擋位的精確控制;
2.5? ?軟件設計
軟件的整體結構如圖7所示。由于考慮到換擋控制中有大量的如查表、濾波、數學及邏輯運算模塊,近似于直接的軟件流程圖,而使用基于模型的開發可以讓工程師更專注于控制算法的實現,而不再糾纏于C代碼實現細節,節省了開發周期,所以開發上使用基于模型的開發MBD(ModelBaseDesign)的模式,應用層Application _SBW部分使用MATLAB生成代碼,其余部分為手寫代碼,參照以往的開發經驗完成。
根據需求的合理分解及降低各個模塊之間的耦合,應用分解為如圖 7所示的7個部分:診斷(Diagnose)、Ecu信號轉換(EcuSigCovert)、執行器(Actor)、Led顯示(LedDisplay)、信號校驗(SigVerify)、擋位判定(GearJudge)、駕駛模式判定(DriverModeJudge)。這7個部分,按照對應的周期調用執行。
2.5.1 診斷模塊(Diagnose)
本模塊主要實現該系統的硬件診斷,當硬件發生故障的時候,需要將故障檢測出來,并記錄在故障碼中。本系統主要完成了擋位傳感器的故障檢測,換擋電機的故障檢測,電壓故障的故障檢測,P擋硬線的故障檢測,傳感器芯片的故障檢測,電源芯片的故障檢測。
其中,傳感器芯片的故障檢測,電源芯片的故障檢測可以由芯片自動檢測并跟芯片通信獲取。故障檢測的策略見下表:
2.5.2 Ecu信號轉換(EcuSigCovert)
由于單片機進行浮點運算的性價比較低,為了能快速準確的進行算法控制,需要一個模塊去完成物理值跟控制值的合理轉換,本模塊主要實現此功能。
2.5.3 執行器(Actor)
本模塊主要負責換擋電機的控制,其中包括:電機正常控制(正向、反向、穩定)及電機異控制控制(停機)。
其劃分為下面模塊:
GearMotorCondition:執行器換擋電機控制
條件(電壓、故障狀態)
GearMotorCurrent:執行器換擋電機當前位置
GearMotorAim:執行器換擋電機目標位置
GearMotorPID:執行器換擋電機PID控制
GearMotorSleep:執行器換擋電機休眠控制
2.5.4 Led顯示(LedDisplay)
本模塊負責Led的顯示,按照液晶屏預定的PRNDS的圖案,進行控制。為了適應整車背光氛圍,換擋器面板包括液晶模塊的背光亮度為可調節,而且與車內燈光模式一致,分為白天模式和夜晚模式(由報文的小燈信號區分)。其中白天模式,按照燈光亮度的100%輸出,夜晚模式根據總線的燈光信號,0-7擋位調節查表輸出。
2.5.5 信號校驗(SigVerify)
駕駛員操作換擋旋鈕,旋鈕的不同角度代表不同的擋位。本產品采用的角度傳感器內部集成2路獨立的霍爾傳感器,只要2路信號輸出不一致,即報故障,可完善安全冗余設計。
為了防止快速轉動而產生漏擋檢測,所以擋位檢測的頻率定為10ms。
2.5.6 擋位判定(GearJudge)
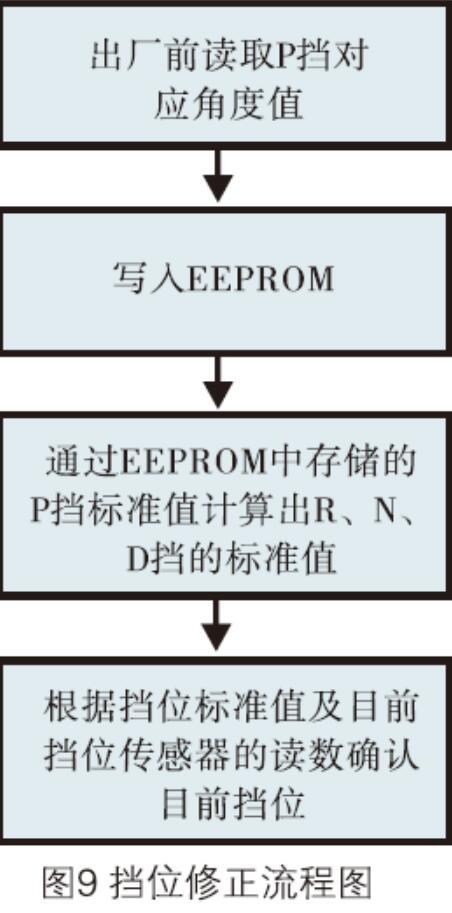
其中旋鈕的角度與擋位的對應關系需要和實際旋鈕結構設計一一對應(如圖3)。目前每個擋位存在一定間隙,旋鈕在同一擋位下能出現一定程度的晃動。加上磁鐵安裝位置,磁場強度,擋位機械間隙等均會帶入誤差。為了提高擋位識別的精度需要在工廠下線的時候,對擋位初始位置需要進行自學習標定。首先將旋鈕旋到P擋,并讀取擋位霍爾傳感器的值作為P擋標準值,并且在后續的擋位判斷均參照該值進行判斷。這樣可以吸收掉一些誤差,提高擋位檢測精度。具體步驟如下:
其中:
1) 下線檢測增加檔位角度校準流程;
2) 換擋器初始位置在P擋,記錄下對應傳感器角度;
3) 將P擋的值寫入EEPROM;
4) 以P擋的值作為絕對參考,每個擋位根據從EEPROM中讀到的P擋值計算后獲取;
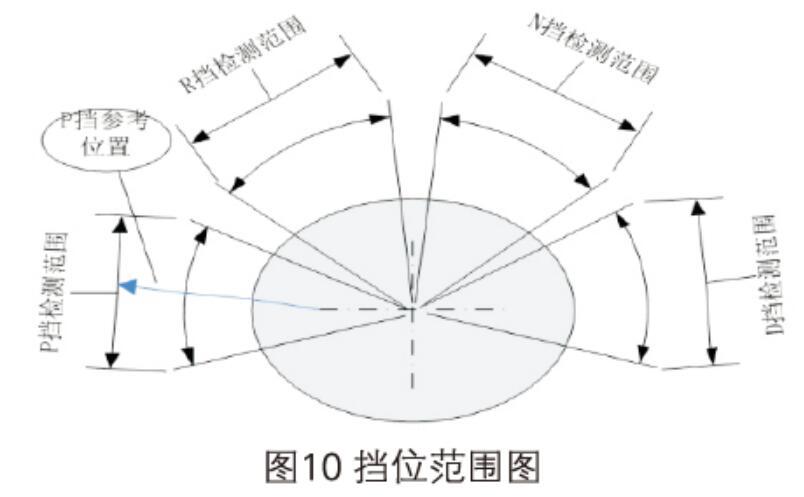
5) 由于P擋左邊緣和D擋的右邊緣的間隙比普通的間隙要大,所以P擋左邊緣和D擋右邊緣的需要較中間擋位放寬一定數值;
6) 需要在每個擋位檢測中間留一定的空隙,避免旋鈕旋到兩個擋位之間的地方會出現擋位跳變;
7) 具體擋位檢測范圍如下圖:
2.5.7 駕駛模式判定(DriverModeJudge)
模式切換功能定義:用于經濟模式和運動模式。不同的運行模式對應整車的油耗或功耗有所不同。模式信號由PGCU采集,并發送給VCU完成執行。模式按鍵布置在電子換擋旋鈕面板上。駕駛模式開關信號捕獲需要進行下述處理:
1) 模式開關采用上升沿觸發
2) 需要進行按鍵濾波,過濾誤觸發的信號
3) 駕駛模式定義為ECO和Normal,其中Normal只在當前駕駛循環有效,為ECO、Normal循環切換,但Normal模式不做記憶,重新上電之后,駕駛模式默認變為ECO。
3? ? 低溫性能驗證
對于換擋器來說,低溫性能是其中一個最為重要的指標,本文給出了低溫試驗的結果如圖 11所示,進行實車低溫性能測試,其中橫坐標為時間,單位為秒,縱坐標為駕駛模式,檔位信號,剎車狀態。按照D-N-R-D擋位循環(約3分鐘一次)進行耐久試驗,可正常換擋、駕駛模式切換,各項基本功能滿足需求。
4? ? 結語
本文所開發的電子換擋系統已配備到新一代傳祺轎車上,實現量產。該電子換檔系統擋位檢測方便準確,利用軟件過濾了危險的換擋操作(如高速掛P/R擋等),大大增加換擋操作的安全性;電機控制搖臂進行換擋,保障了換擋的精確性;擋位檢測和擋位執行分開為后續的自動駕駛打下基礎。
參考文獻:
[1]和衛民.基于AMT的換檔手柄ECU的系統設計[D].吉林大學,2006.
[2] AUTOSAR R3.1 Rev 0001 [S] AUTOSAR GbR
[3]Automotive SPICE Process Reference Model Process Assessment Model[S]. Version 3.1. 2017.
[4]劉貽樟. AMT控制技術[M].機械工業出版社,2017年02月.
[5]宋珂、王民、單忠偉、譚楊. AUTOSAR規范與車用控制器軟件開發[M]. 化學工業出版社,2019年01月.