級聯式ROV的設計及典型應用研究
2021-11-04 06:05:22李孟學孫慶鵬
數字海洋與水下攻防 2021年5期
李孟學,孫慶鵬
(中國人民解放軍92213部隊,廣東 湛江 524064)
0 引言
隨著科技的進步和海洋資源的開發與利用,國內外關于水下遙控機器人(ROV)[1-3]的研究十分火熱,其行業競爭也非常激烈。目前國內外投入使用的ROV數量眾多,這些ROV在各個行業發揮了重要作用。為了更好地掌握不同類型ROV的特點,需要對其進行分類:從ROV的重量來分,可以分為超大型、大型、中型、小型、微型;從功能來分,可以分為觀察級和作業級;從作業能力強弱來分,可以分為作業級和重載作業級;從動力提供方式來分,可以分為液壓驅動和電動。
ROV[1-3]具有作業適應性強、功率大、功能擴展靈活、作業時間不受限制等優勢,可以支撐復雜的探測設備和較大的作業機械。它的信息和數據傳遞交換方便快捷、數據量大、總體決策水平較高,是人類開展水下活動不可或缺的裝備,也是世界上數量最多、應用最廣泛、類型最復雜、功能最強大的潛水器。
ROV的組成[3-4]主要包括 ROV本體、中繼器(TMS或depressor)、臍帶纜、吊放回收系統、甲板操作控制系統、電力傳輸系統、機械手、作業工具包等。其中,ROV本體、臍帶纜、甲板操作控制系統、電力傳輸系統為基本配置,其余部分可根據系統規模、作業需求進行配置。根據系統所處的位置,ROV系統又可以分為水面和水下2個部分,水面部分主要包括臍帶纜、吊放回收系統、甲板操作控制系統,水下部分包括ROV本體、中繼器、機械手和作業工具包,水面部分和水下部分由臍帶纜連接。系統電源由母船提供,水面部分起控制水下部分的作用。同時,水下ROV工作狀況及視頻圖像、聲吶圖像經臍帶纜實時傳輸至工作母船。
當前,ROV的應用[1-3]十分廣泛,市場十分廣闊,歸納起來主要有3點:1)海洋科學考察[5];2)海洋資源[6-8](包括油氣、天然氣水合物、固體礦產資源等)勘探開發;3)水下作業[9-10]。
為進一步提升 ROV的應用空間,需要更新ROV的設計理念,突破傳統思路的束縛,本文結合現實生活中可能遇到的實際情況,提出級聯式ROV的設計構想并進行了初步研究,下面就級聯式ROV的特點、組成、關鍵技術和應用場景進行介紹。
1 級聯式ROV的主要特點
級聯式ROV是多個 ROV之間的級聯,其級聯方式是大中型ROV內嵌或者掛載1個或多個小型ROV,從而實現多個ROV之間的級聯。一般來說,大中型ROV具有抗流能力強、動力充足、下潛速度快、穩定性能好、負載能力強等優點,小型ROV具有阻力小、機動靈活等優點。如果將大中型ROV的優點和小型ROV的優點進行綜合,ROV執行任務的效率將會得到進一步提高。基于以上考慮,設想采用大中型ROV攜帶小型 ROV至預定海域執行任務,大中型ROV主要執行戰略投送任務,小型ROV主要執行具體作業任務,則可以突破以往作業方式對ROV性能的束縛。
2 級聯式ROV系統的組成
級聯式ROV系統主要由甲板控制單元、臍帶纜、絞車、中繼器(系纜管理系統等)、級聯式ROV本體等組成,如圖1所示。其中,甲板控制單元既可以同時顯示多個ROV水下的視頻信息和聲吶信息,又可以顯示多個ROV在水下的位置信息、運動信息和狀態信息。根據水下環境的特點,可以分別控制多個ROV同步執行不同的作業任務。臍帶纜主要用于傳輸各類信號,水面部分和水下部分的通信全靠臍帶纜進行傳輸。中繼器主要起到信號中繼作用,同時可以減小海流對ROV本體的影響,需要根據具體水深考慮是否需要中繼器。級聯式ROV本體是大中型ROV和小型ROV組成的混合體,級聯式ROV本體由于體積較大、重量較重,抗各種復雜海況影響的能力較強,可以準確地到達預定作業海域,小型ROV在預定海域脫離大中型ROV后即可執行作業任務。
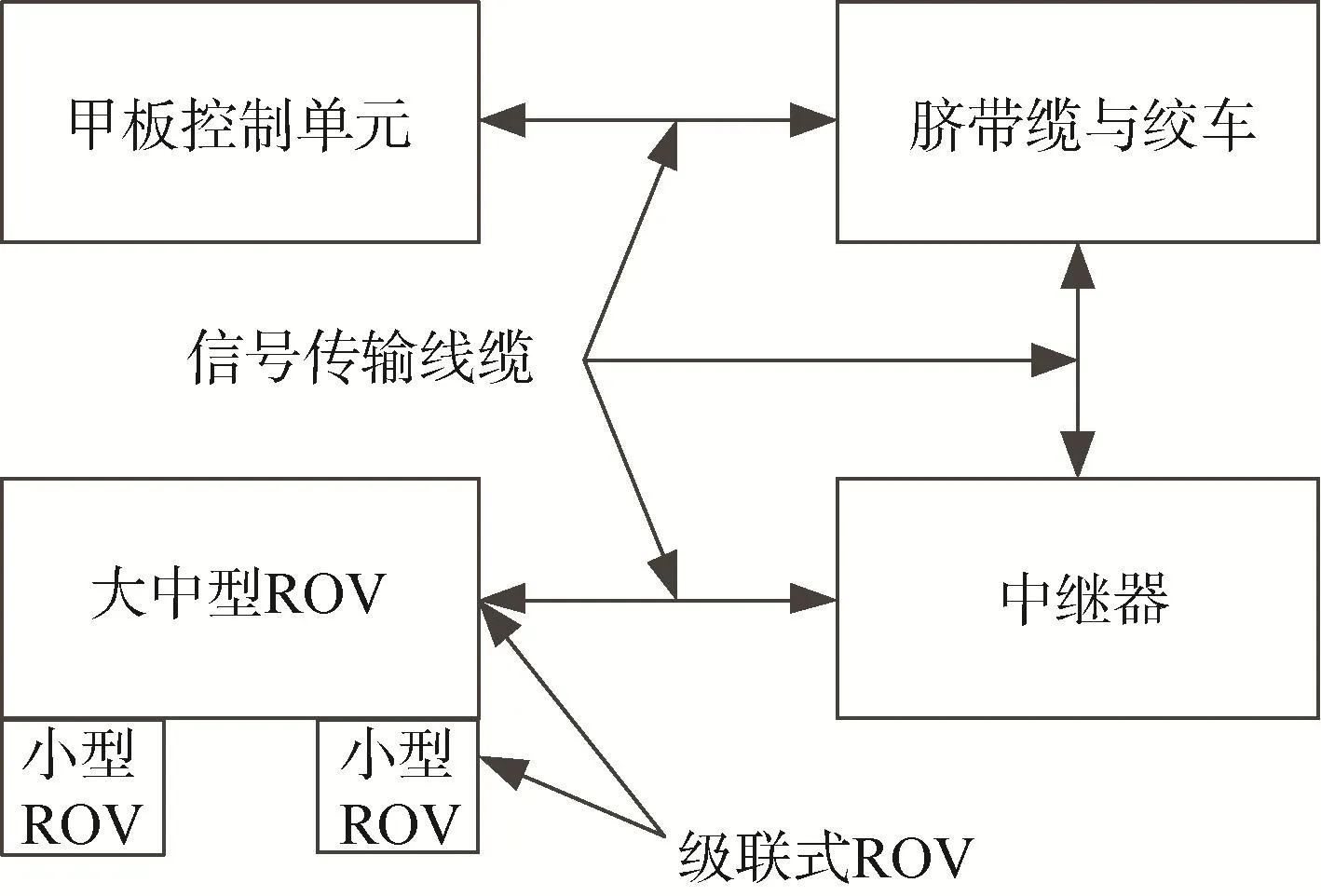
圖1 級聯式ROV系統組成Fig.1 System composition of cascaded ROV
級聯式ROV本體中,大中型ROV和小型ROV之間有1個可靠的分離回收裝置,該裝置在級聯式ROV下潛和回收過程中能夠確保兩者可靠固定,在執行任務過程中能夠可靠釋放小型 ROV,執行任務完畢后能夠可靠回收小型 ROV。該裝置主要由纜繩釋放回收模塊、小型ROV固定與釋放模塊、釋放與回收引導模塊、監測模塊等組成。
3 級聯式ROV的關鍵技術及解決措施
級聯式ROV設計是一種全新的設計理念,但是其設計技術相對比較成熟,在進行設計時可以充分借鑒大中型ROV的設計理念來提高設計效率。在具體進行設計時,除常規ROV設計需要考慮的關鍵技術外,還需要重點把握的關鍵技術及解決措施主要有以下幾個方面:
1)整體控制技術。
級聯式ROV在進行設計時,需要重點考慮甲板控制單元如何進行顯示、如何對級聯式ROV進行控制、如何對級聯式ROV進行監控等。在進行具體設計時,對于甲板控制單元顯示界面和級聯式ROV的控制問題,有以下2種解決措施:①采用分散控制,即通過設置多個顯控單元,每個顯控單元顯示并控制 1個 ROV,并且每個顯控單元都配有控制手柄;②采用集中控制,即所有的顯示和控制信息都集中在1個顯控單元上,通過切換不同的控制通道實現對不同ROV的顯示與控制。對于水下級聯式ROV的控制,同樣可以分為集中控制和分散控制。集中控制模式下不同ROV之間的運動存在一定程度的關聯,分散控制模式下不同 ROV之間的運動沒有相互影響。從總體上說,級聯式ROV的控制分為4種模式,分別是水面分散控制水下分散控制、水面分散控制水下集中控制、水面集中控制水下分散控制、水面集中控制水下集中控制。在進行設計時具體采用何種控制模式,需要根據級聯式ROV執行任務的不同進行確定。
2)整體設計技術。
級聯式ROV整體結構布局與單個ROV結構布局存在較大的差異,在進行設計時要重點考慮以下幾個方面:①多個ROV之間的整體平衡技術。在進行級聯式ROV設計時,要對系統各部位充分進行配平,防止級聯式ROV在水下運動時搖晃幅度過大或發生翻滾現象。②單個ROV的平衡技術。級聯式 ROV到達預定海域后,大中型ROV和小型 ROV之間進行分離。分離后的大中型 ROV和小型ROV各自要有較好的平衡性,不能因為大中型 ROV與小型ROV的分離導致兩者在水中的狀態都發生變化,即分離后大中型ROV與小型ROV都能夠各自保持平衡。③整體空間布局技術。級聯式ROV的整體空間布局要合理,不能對推進器、機械手的功能發揮有影響,不能對聲吶、視頻設備等探測設備有遮擋。④水下固定及釋放技術。級聯式ROV在未執行任務時要能夠可靠固定,使用時要能夠可靠釋放,并且大中型 ROV與小型 ROV的分離與結合要能夠方便迅速。⑤整體抗流技術。級聯式ROV整體設計的流線型要好,迎流面積要盡可能小,整體抗流能力要強。
3)水下布放回收技術。
水下布放回收技術包括級聯式ROV的整體布放回收技術以及大中型ROV和小型 ROV的水下分離與結合技術。級聯式ROV的整體布放回收技術相比傳統ROV的布放回收技術復雜很多,由于其體積較為龐大,設計較為精細,部件較多,在進行布放回收時對海況的要求很高,常用的布放回收設備主要是折臂吊車、A型架等。當級聯式 ROV到達預定作業海域后,小型ROV要與大中型ROV進行分離,此時大中型ROV上控制小型ROV狀態的解鎖裝置要能夠可靠解鎖,解鎖后的小型ROV要能夠在甲板操作人員的控制下逐漸遠離大中型ROV,并且小型ROV的臍帶纜要能夠自動收放。當小型 ROV 執行完作業任務后,小型 ROV在甲板操作人員的控制下逐漸接近大中型 ROV,并且在接近過程中小型ROV的臍帶纜能夠自動收回,在臍帶纜的引導和甲板操作人員的控制下,小型ROV與大中型 ROV逐漸接近并精準匯合,小型ROV歸位后能被大中型ROV可靠鎖住。
4)母船與級聯式ROV之間的通信技術。
母船與級聯式ROV之間的通信非常復雜,涉及到電力信號傳輸、控制信號傳輸、視頻信號傳輸、聲吶圖像信號傳輸。由于通信距離較遠,臍帶纜較長,為提高信號傳輸速率,防止出現卡頓情況,母船到級聯式ROV本體之間的視頻信號、聲吶圖像信號采用光纖進行通信,級聯式ROV內部采用電信號進行通信。級聯式ROV本體上設計有綜合配線板,從該配線板可以引出多條線路分別給大中型ROV和小型ROV提供能源、傳輸控制信號、視頻信號和聲吶圖像信號,同時還引出部分線路用于控制小型ROV臍帶纜的收放、小型ROV的固定與解鎖。在進行通信系統設計時,要充分考慮系統整體的功率大小、控制線纜數量多少、光纖線纜數量多少,同時要預留有備用的電力信號傳輸線、控制信號線、光纖信號線,當在執行任務過程中如果部分線纜發生故障,能通過更換備用線纜繼續執行任務。
5)冗余設計和模塊化設計技術。
級聯式ROV整體要采用冗余設計,當部分元器件損毀后設備要能夠正常工作,即使無法正常工作也要確保級聯式 ROV可以安全回收。級聯式ROV整體結構采用模塊化設計,當部分器件發生故障后,通過更換備用模塊可以快速恢復至正常工作狀態。
6)水聲與電磁防護技術。
級聯式ROV攜帶的聲吶等探測設備較多,當多個聲吶同時開機時,聲吶之間如果頻率相差不大會產生相互干擾,為避免這種情況出現,在具體設計時可以采用不同頻率的聲吶,從而避免聲吶之間相互干擾。同時,當無法避免聲吶設備之間的相互干擾時,可以錯峰錯時進行工作,從而消除干擾。級聯式ROV內部使用的供電信號、控制信號、視頻信號、聲吶圖像信號都是采用電信號進行傳輸的,為防止電磁輻射的干擾,需要對信號進行屏蔽,防止電磁頻譜泄漏對周圍電信號傳輸的影響。
4 級聯式ROV的典型應用場景
級聯式ROV的設計目的是為了能夠在特定的環境執行特殊的任務,下面就級聯式ROV幾種典型的應用場景進行說明。
4.1 大深度水下目標搜尋與打撈
在進行大深度水下目標搜尋時,由于ROV下潛深度很大,臍帶纜釋放的長度會很長,由于臍帶纜在海流的作用下會受到很大的作用力,這將對ROV水下機動性能造成很大的影響,嚴重時可能導致 ROV無法正常執行作業任務。為提高 ROV在大深度作業時的效率,傳統的思路是在臍帶纜上加配重塊,但當深度很大時僅僅靠增加配重塊這種方式來減小海流對臍帶纜的影響效果并不是很明顯。此時,如果采用級聯式ROV進行水下作業可以克服以上不足。級聯式ROV水下目標搜尋與打撈的具體思路是:操控級聯式ROV下潛到作業海區,觀察作業海區周圍環境后使級聯式ROV坐底或者定高在某一高度,解鎖小型ROV并操作小型ROV執行水下目標搜尋任務。甲板操控人員可以根據大中型ROV和小型 ROV上攜帶的攝像機和聲吶探測設備實時觀察到ROV周圍的環境,當小型ROV發現目標后即可執行對水下目標的打撈任務,如果水下目標太大,小型ROV發現目標后還可以引導大中型ROV協助打撈。水下作業完畢后,首先操縱小型ROV與大中型ROV匯合,小型ROV歸位后及時上鎖并固定,之后甲板操作人員回收級聯式ROV。
4.2 大深度水下管道、隧道探摸
當ROV需要執行大深度水下管道、隧道探摸時,如果采用小型ROV進行探摸作業會發生小型ROV無法下潛至該深度,或者即使下潛至該深度,由于臍帶纜纜繩釋放長度較長且受海流影響較大,發生小型ROV無法正常執行任務的情況。如果采用大中型ROV進行作業盡管可以克服海流對臍帶纜的影響,但是由于臍帶纜纜繩釋放長度較長,ROV體積較大,其機動性能同樣受到很大影響。如果管道附近地形比較狹窄、隧道洞口比較小,大中型ROV執行任務過程中可能會被卡住。為避免以上情況,采用級聯式ROV是一個較好的解決辦法,具體工作思路是:操控級聯式ROV至水下管道、隧道附近,首先對作業海區環境進行觀察,然后選取有利地形坐底或者定高,解鎖并釋放小型ROV執行探摸作業,作業完畢后操縱小型ROV與大中型ROV匯合,小型 ROV歸位后及時上鎖并固定,之后甲板操作人員回收級聯式ROV。
4.3 大深度且具有危險性的水下特殊場景作業
當海底發生火山噴發、石油泄漏時,為迅速了解險情并做出應對處置方案,需要首先使用ROV進行水下觀察并獲取水下態勢信息。當炸彈未爆、船舶破損沉入海底時,如果對危險物或者船舶進行打撈,同樣需要了解其水下的環境信息。此時如果采用大中型ROV執行大深度作業任務,由于臍帶纜纜繩釋放長度較長,水下環境又較為復雜,ROV在水下的機動性能將受到很大影響。如果 ROV在進行觀察作業時發生臍帶纜纏繞會導致ROV的回收非常困難,嚴重時ROV有可能會丟失。為盡量減小可能發生的損失,同時完成水下特殊作業任務,采用級聯式ROV非常合適。級聯式ROV如果只用小型ROV進行探測作業,由于其機動性能強,其作業效率非常高,并且即使在執行任務過程中小型ROV損壞或者丟失,其造成的損失也較小。
4.4 大深度水下精細化作業
當大深度海底布設各類傳感器時,由于海流的影響,經常會出現傳感器被泥沙掩埋的情況,這會導致傳感器失靈或者探測效果變差。即使傳感器沒有被泥沙掩埋,傳感器長期布設海底時,海蠣子會在上面附著,長此以往也會對傳感器的性能造成影響。為恢復傳感器的性能,傳統的解決方法主要有2種:1)將傳感器打撈出水,清理干凈后重新布放;2)打撈成本較高時,在該位置重新布放1個新的傳感器。盡管以上2種方法可以解決傳感器的探測性能問題,但也存在效費比、低資源浪費的現實問題,如果可以在水下對傳感器進行維護,則成本會大大降低,采用級聯式ROV可以實現這一目的。具體解決思路是:級聯式ROV下潛至作業海域,觀察海域周圍環境后坐底或者在水下定高,解鎖并操作小型ROV逐漸靠近傳感器。如果傳感器被泥沙掩埋,則使用機械手將傳感器從泥沙中取出并采用噴水裝置對傳感器進行清洗。如果傳感器重量較大,大中型ROV的機械手可以予以協助。當傳感器上附著有海蠣子時,小型ROV的清洗刷可以對海蠣子進行清除,從而消除海蠣子對傳感器性能的影響。
4.5 大深度需要多個ROV配合的作業
水下環境十分復雜,有時候僅僅依靠單個ROV難以完成水下作業任務,傳統的解決思路是同時布放2個或多個ROV,這些ROV既可以從多條船布放,也可以從同一條船布放。但是,在海流的影響下,母船的位置會發生變化,這有可能導致多個ROV在下潛過程中發生臍帶纜纏繞問題。如果出現這種情況,ROV將無法完成作業任務,并且ROV回收的風險會非常高,嚴重時會造成個別ROV丟失。采用級聯式ROV可以避免發生ROV丟失情況,級聯式ROV進行水下作業時僅有1根主纜,不存在臍帶纜纏繞問題,末端解鎖并釋放的多個小型ROV可以朝不同的方向出發,從而避免臍帶纜末端纏繞。即使級聯式ROV末端發生了臍帶纜纏繞問題,大中型 ROV也可以將小型 ROV帶回水面進行處置,從而避免了ROV的丟失。
5 結束語
本文基于現實問題的考慮,提出了級聯式ROV的設計構想,并對需要解決的關鍵技術和解決措施進行了分析,最后舉例說明了級聯式 ROV的應用場景,有較強的系統性實用性。本研究對于提升 ROV的作業性能、拓寬 ROV的作業范圍具有一定的現實意義,同時也為從業人員開展更深入的研究提供了參考。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
