某箱式發射裝置機器人裝填技術研究
2021-11-04 06:05:40陳國虎劉志仙
數字海洋與水下攻防 2021年5期
陳國虎,劉志仙,李 能
(國營第四四五廠,浙江 杭州 310024)
0 引言
自推動武器具有無后座力、使用靈活、火力迅猛、性價比較高的優點,廣泛用于反潛、反雷[1]、反蛙人、攻擊灘涂陣地、防空干擾等作戰任務。我國現役艦載火箭發射裝置大量采用箱式設計,對實現發射裝置的隱身性、提高發射裝置排布密度具有較大的優勢。由于受到結構布局、技術手段的限制,部分箱式發射裝置采用人工裝填的方式,由揚彈系將武器從彈倉輸送至甲板,再由人工裝入發射管中。完成一輪發射后無法快速進行下一輪的發射工作,嚴重影響了武器效能的發揮,安全性也無法保障。基于上述原因,急需研制一套針對箱式發射裝置的自動裝填系統,采用主從隨動遙操作控制,由裝填機器人將武器裝入發射裝置中,實現自動裝填,取代人工裝填徹底消除人員在艦面操作的安全隱患,提高裝填效率。
1 研究方案
通過對中大口徑的火炮彈藥進行自動裝填研究[2],針對箱式火箭發射裝置,由于其結構的特殊性,更適用于采用機器人機械臂的結構形式。
發射裝置裝填機器人工作原理是采用主從隨動遙操作方式,操作者在甲板下遠程遙操作甲板上的裝填機械手進行彈體自動裝填。
完成1次裝填調試后,主從隨動遙操作控制器記憶裝填機械臂運動參數,對后續裝填過程實現全自動裝填。裝填機器人裝填過程如圖1所示。
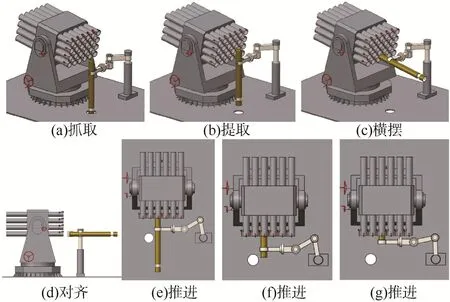
圖1 裝填機器人工作過程示意圖Fig.1 Working process diagram of loading robot
非裝填時,裝填機器人折疊縮放至甲板以下,不對發射裝置運動過程產生影響。裝填機器人內部裝有觸覺開關以檢測其抓彈信號,這是機器人工作安全的保證。
裝填機器人上配有視覺攝像頭[3],監控機器人工作狀態,一旦工作出現異常可人工干預。
發射裝置裝填機器人系統主要的特點有:1)采用主從隨動示教方式控制,操作簡便易掌握;2)彈體在豎直面內可自由轉動以便調整其姿態;3)采用安全皮膚技術,如果因操作不當導致機械手碰及物體時將自動停止,保證機器人工作的安全;4)抓彈手指采用電機驅動,并采用安全壓力控制,避免抓彈時壓力過大而損壞彈體[4]。
出于對裝填機器人的剛度和強度的考慮,改進其結構如圖2所示。
其裝填示意圖如圖3所示:裝填機械手首先進入姿態(a),裝填導軌與揚彈通道對齊,提彈機構處于最后端位置,將載荷夾緊;在姿態(b)時,由提彈機構將載荷往上提取;裝填機械手通過姿態(c)和(d)調整,將裝填軌道與裝置的發射管對齊;最后在姿態(e),將載荷推入發射管內部,實現裝填功能。
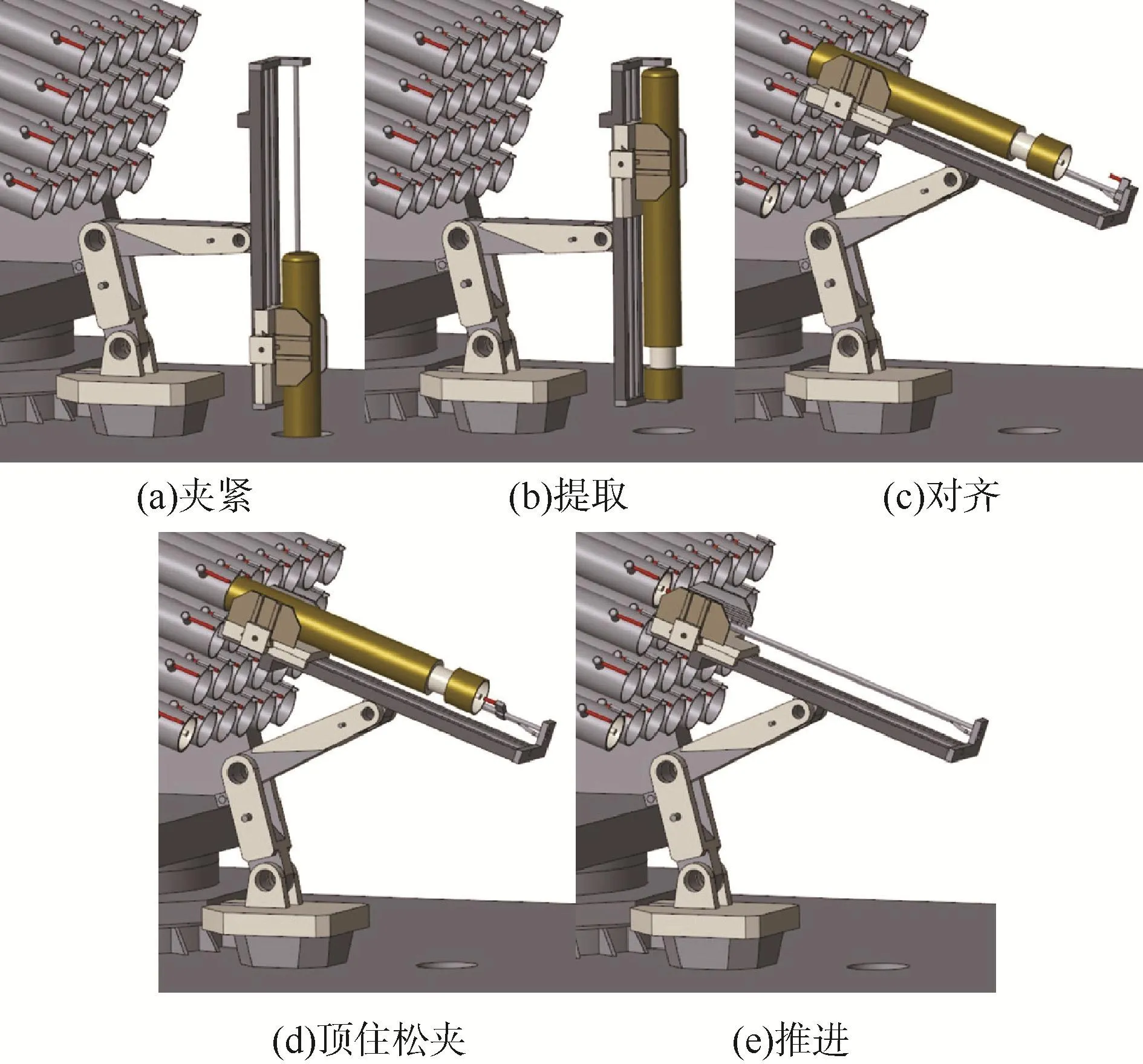
圖3 機械臂裝填過程Fig.3 Loading process of manipulator
2 仿真分析
為確定裝填機械臂的結構合理性,采用ANSYS和ADMAS軟件進行仿真研究[5-6]。ANSYS Workbench[7]軟件是美國 ANSYS公司研制的大型通用有限元分析軟件,是世界范圍內增長最快的計算機輔助工程軟件,能與多數計算機輔助設計軟件接口,實現數據的共享和交換,如 Creo、UG、CATIA、Solidworks、AutoCAD等。該軟件是融結構、流體、電場、磁場、聲場分析于一體的大型通用有限元分析軟件。在核工業、鐵道、石油化工、航空航天、機械制造、能源、汽車交通、國防軍工、電子、土木工程、造船、生物醫學、輕工、地礦、水利、日用家電等領域有著廣泛的應用。ANSYS功能強大,操作簡單方便,現在已成為國際最流行的有限元分析軟件。ANSYS Workbench主要包括 3個部分:前處理模塊、分析計算模塊、后處理模塊。前處理模塊提供了一個強大的實體建模及網格劃分工具,用戶可以方便地構造有限元模型。分析計算模塊包括結構分析、流體動力學分析、電磁場分析、聲場分析、壓電分析以及多物理場的耦合分析,可模擬多種物理介質的相互作用,具有靈敏度分析及優化分析能力。后處理模塊可將計算結果以彩色等值線顯示、梯度顯示、矢量顯示、粒子流跡顯示、立體切片顯示、透明及半透明顯示等圖形方式顯示出來,也可將計算結果以圖表、曲線形式顯示或輸出。
ADAMS/View提供了一個直接面向用戶的基本操作對話環境和虛擬樣機分析的前處理功能,其中包括樣機的建模和各種建模工具、樣機模型數據的輸入與編輯、與求解器和后處理等程序的自動連接、虛擬樣機分析參數的設置、各種數據的輸入和輸出、同其他應用程序的接口等。ADAMS/View采用了Windows風格的操作界面和各種操作習慣,使得程序操作界面非常友好。
ADAMS/Solver是求解機械系統運動和動力學問題的程序。完成樣機分析的準備工作以后,ADAMS/View程序可以自動地調用 ADAMS/Solver模塊,求解樣機模型的靜力學、運動學或動力學問題,完成仿真分析以后再自動地返回ADAMS/View操作界面。
ADAMS仿真分析結果的后處理,可以通過調用后處理模塊 ADAMS/PostProcessor來完成。ADAMS/PostProcessor模塊具有相當強的后處理功能,它可以回放仿真結果,也可以繪制各種分析曲線。除了可以直接繪制仿真結果曲線以外,ADAMS/PostProcessor還可以對仿真分析曲線進行一些數學和統計計算,可以輸入實驗數據繪制試驗曲線,并同仿真結果進行比較,可以進行分析結果曲線圖的各種編輯。
機械臂的仿真分析為靜力結構分析和運動學分析,分別在ANSYS Workbench和ADMAS軟件下完成[8]。
仿真研究在載重為130 kg時,分析機械臂的應力和變形情況。在各個關節的輸入移動速度已知的情況下,求解得到機械臂導軌端的速度。機械臂簡化模型導入到ANSYS Workbench中。仿真設定機械臂主要零部件的材料性能如表1所示。
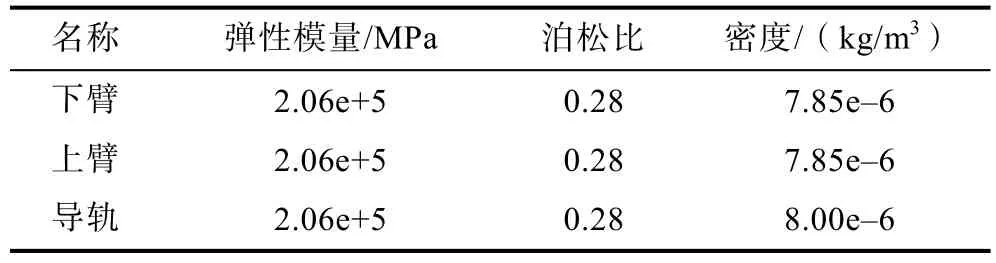
表1 機械臂主要零部件材料性能表Table 1 Material performance of main parts of manipulator
通過仿真,解得到機械臂的應變和變形圖如圖4-5所示,機械臂的最大應變為8.25e-6 mm,位于上臂與下臂的連接處;機械臂的最大變形為0.023 mm,位于導軌前后端面。該應變和變形處于合理范圍內,滿足要求。
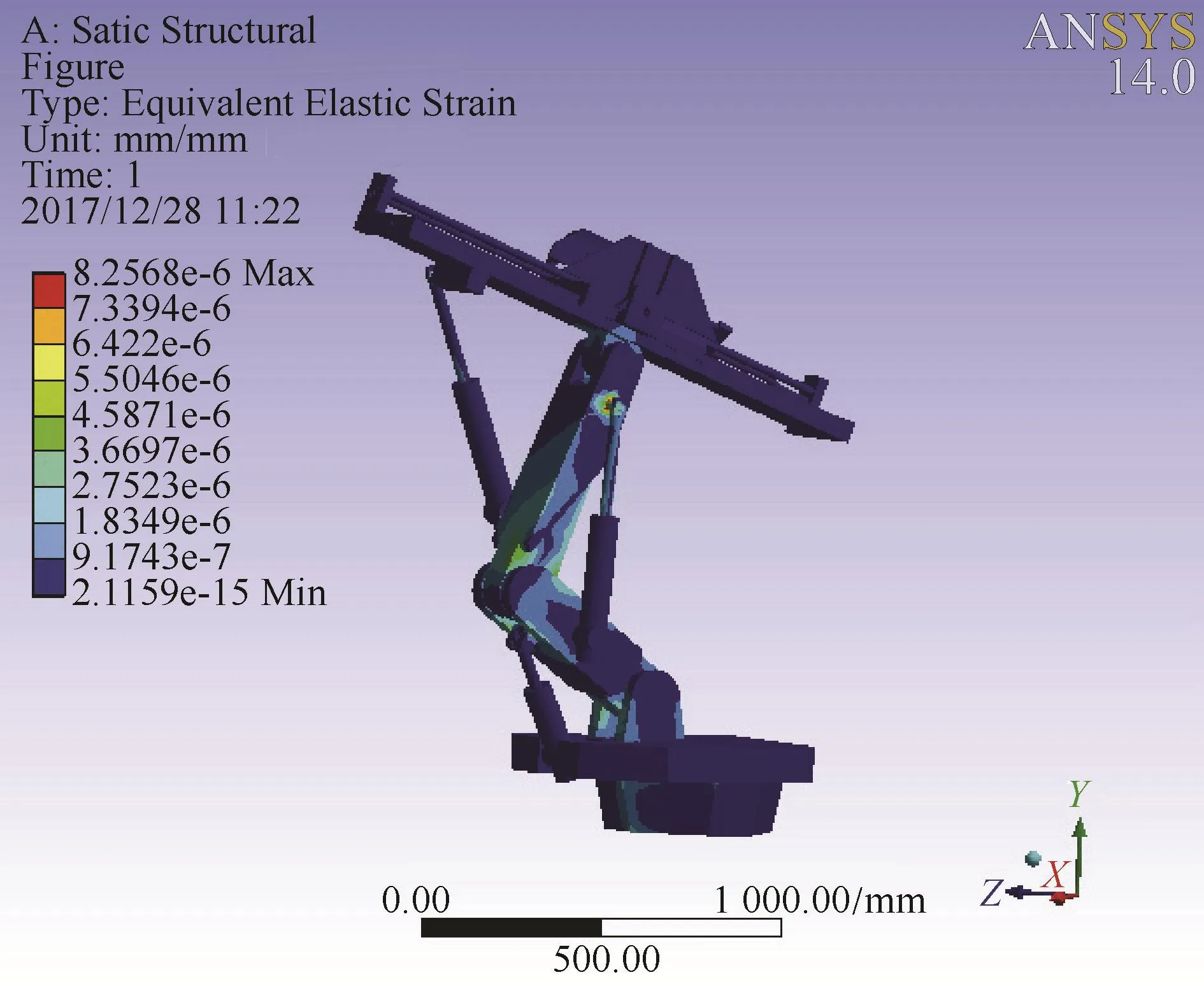
圖4 ANSYS仿真應變圖Fig.4 ANSYS simulated strain diagram
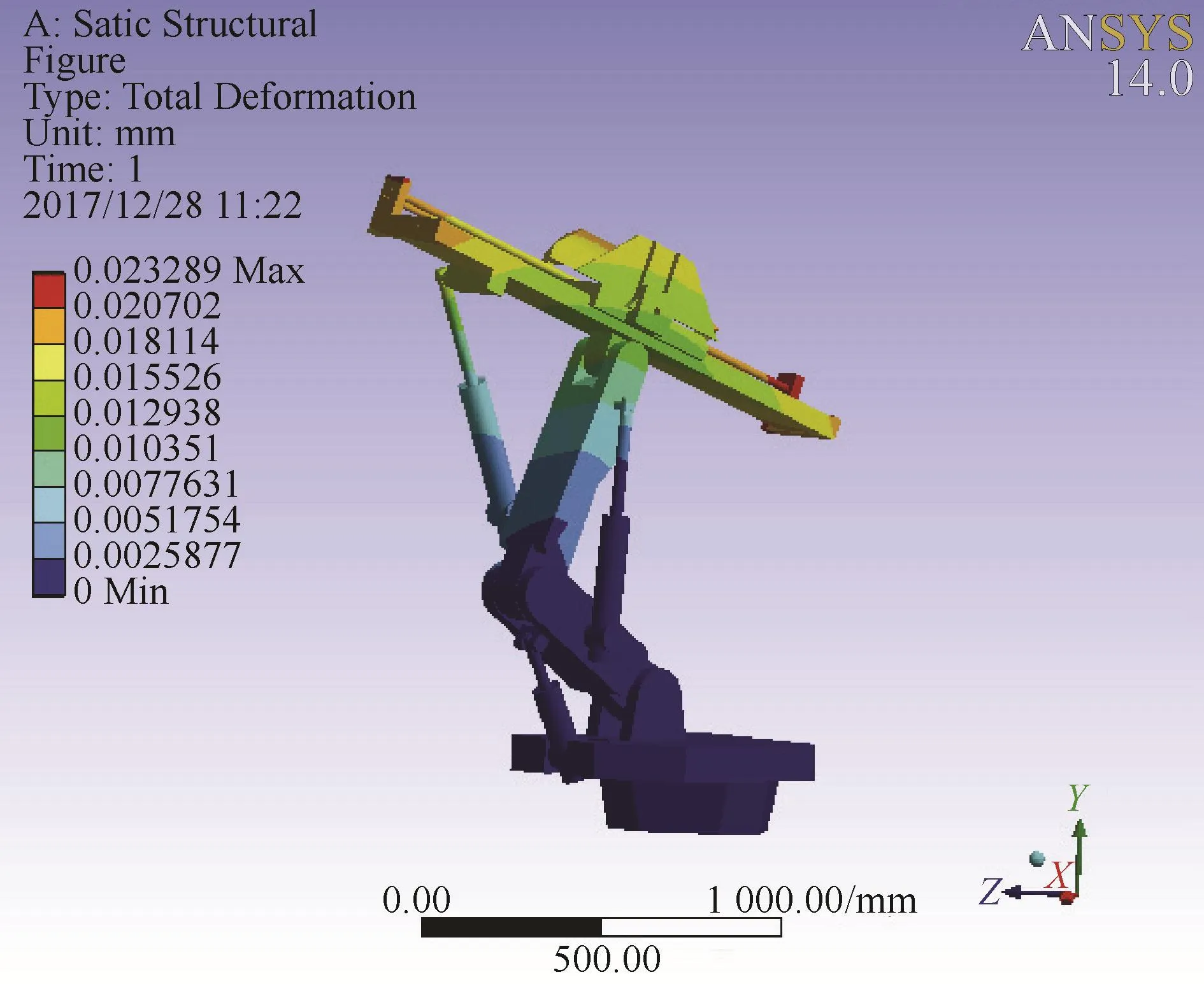
圖5 ANSYS仿真變形圖Fig.5 ANSYS simulated deformation diagram
對機械臂采用ADMAS仿真分析,設定推桿1的速度為0.02 m/s,方向沿著推桿縮回;設定推桿2速度為0.03 m/s,方向沿著推桿縮回;設定推桿3的速度為0.04 m/s,方向沿著推桿縮回。求解得到導軌左端零件質心X、Y、Z方向的位移曲線和運動速度曲線如圖6-7所示。
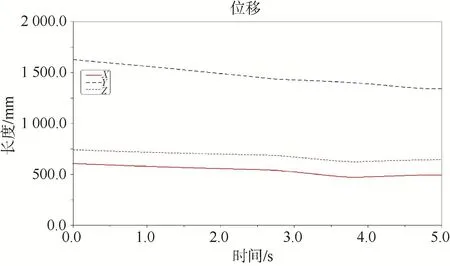
圖6 機械臂左端零件質心的位移Fig.6 Displacement of mass center of left end part of manipulator
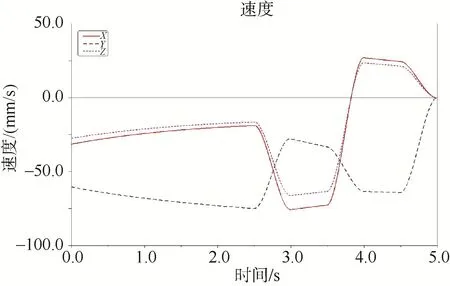
圖7 機械臂左端零件質心的運動速度Fig.7 Velocity of mass center of left end part of manipulator
通過 ADMAS求解可以得到機械臂零件的任意位置的位移和運動速度,確定機械臂各部位質心運動情況。通過仿真確定了機械臂左端零件質心的位移和速度滿足設計要求。
3 結束語
針對傳統箱式發射裝置采用箱式結構時裝填方式原始、效率底下、安全無法保障的缺點,提出了一種機械臂裝填方案,采用 ANSYS、ADMAS進行仿真分析研究,確定了該機械臂裝填方案的可行性。機器人自動裝填技術的研究對于提升箱式發射裝置的作戰效能、拓展箱式發射裝置應用范圍具有較大的意義[9]。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
今日農業(2020年20期)2020-12-15 15:53:19
當代工人(2020年8期)2020-05-25 09:07:38
能源(2018年10期)2018-12-08 08:02:48
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
山東工業技術(2016年15期)2016-12-01 05:31:22
科技知識動漫(2016年8期)2016-07-29 20:40:09
能源(2016年10期)2016-02-28 11:33:30
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
