萬向節軸系傾角對水下航行體聲場輻射特性的影響
2021-11-04 06:05:46余靖
數字海洋與水下攻防 2021年5期
余 靖
(中國船舶重工集團有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
水下航行體低噪聲性能是其總體性能先進性的重要評價指標,水下航行體聲輻射噪聲包括機械噪聲、水動力噪聲、螺旋槳噪聲,其中機械噪聲最主要來源于動力推進系統,因此評估水下航行體動力推進系統振動噪聲水平尤為重要。
萬向節傳動是動力系統中常用的動力傳遞方式,其具有較大的角度和位移補償能力,在輸入和輸出軸存在較大軸間夾角的情況下,也能穩定可靠地傳遞轉矩和運動。但當其存在軸間夾角時,萬向節傳動會產生附加載荷,附加載荷可以引起與萬向節相聯組部件的振動;此外,由于安裝誤差等因素,動力推進系統組部件安裝基座也可能出現一定的偏差角,從而造成輸出轉速和輸出轉矩的周期性非線性振動。由萬向軸振動形成的激勵會經由基座安裝腳等傳遞路徑在航行器殼體上形成異常的振動響應。
因此,探究萬向軸軸間夾角和基座安裝偏斜角對于動力系統振動聲輻射的影響,有助于萬向節聯軸器的合理設計與準確布置,使其能更可靠地傳遞動力,抑制運動傳遞中產生的振動噪聲輻射[2]。
1 單十字萬向軸的傳動特性
萬向軸傳動結構中,由于輸入軸與輸出軸之間存在一夾角,單十字萬向軸主、從動軸的瞬時角速度比是變化的。
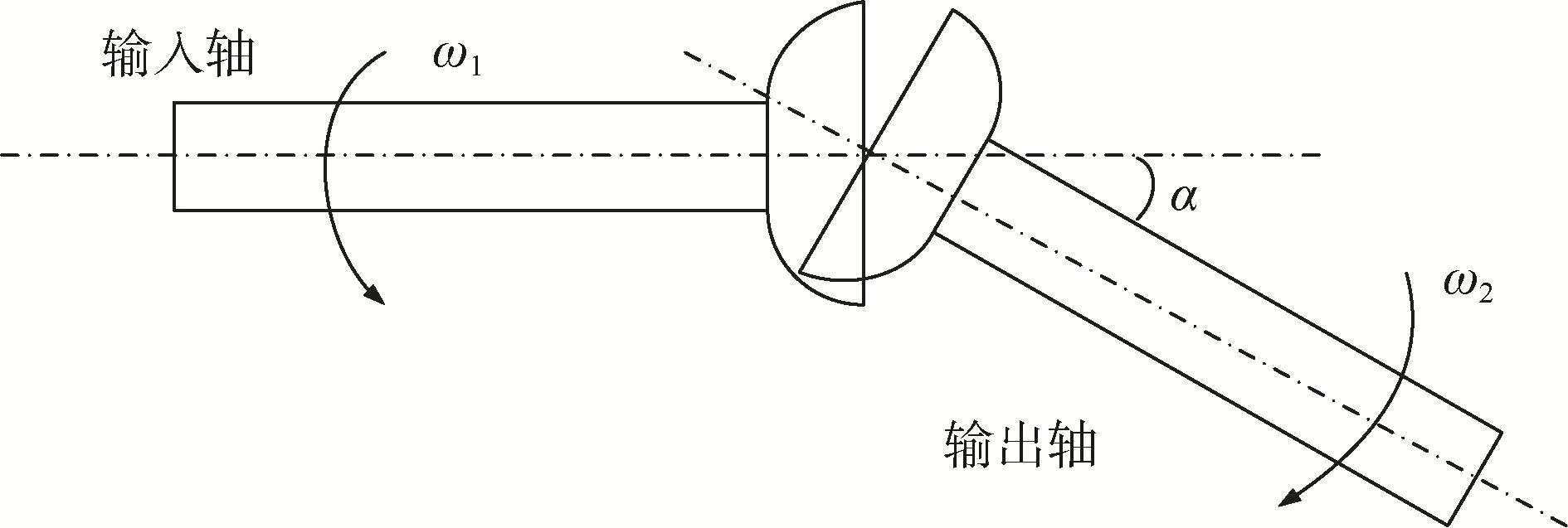
圖1 單十字萬向軸傳動Fig.1 Single cross cardan shaft drive
由相關文獻可得主、從動軸的角速度1ω,2ω之間關系[3]:

式中:1ω為主動軸角速度;2ω為從動軸角速度。
依式(1)分別作出主、從動軸夾角α為0、1°、2°、3°時,從動軸角速度和角加速度隨時間的變化關系如圖 2、圖 3,仿真時設主動軸轉速為ω1= 1 500 r/min ,仿真時長為0.1 s。
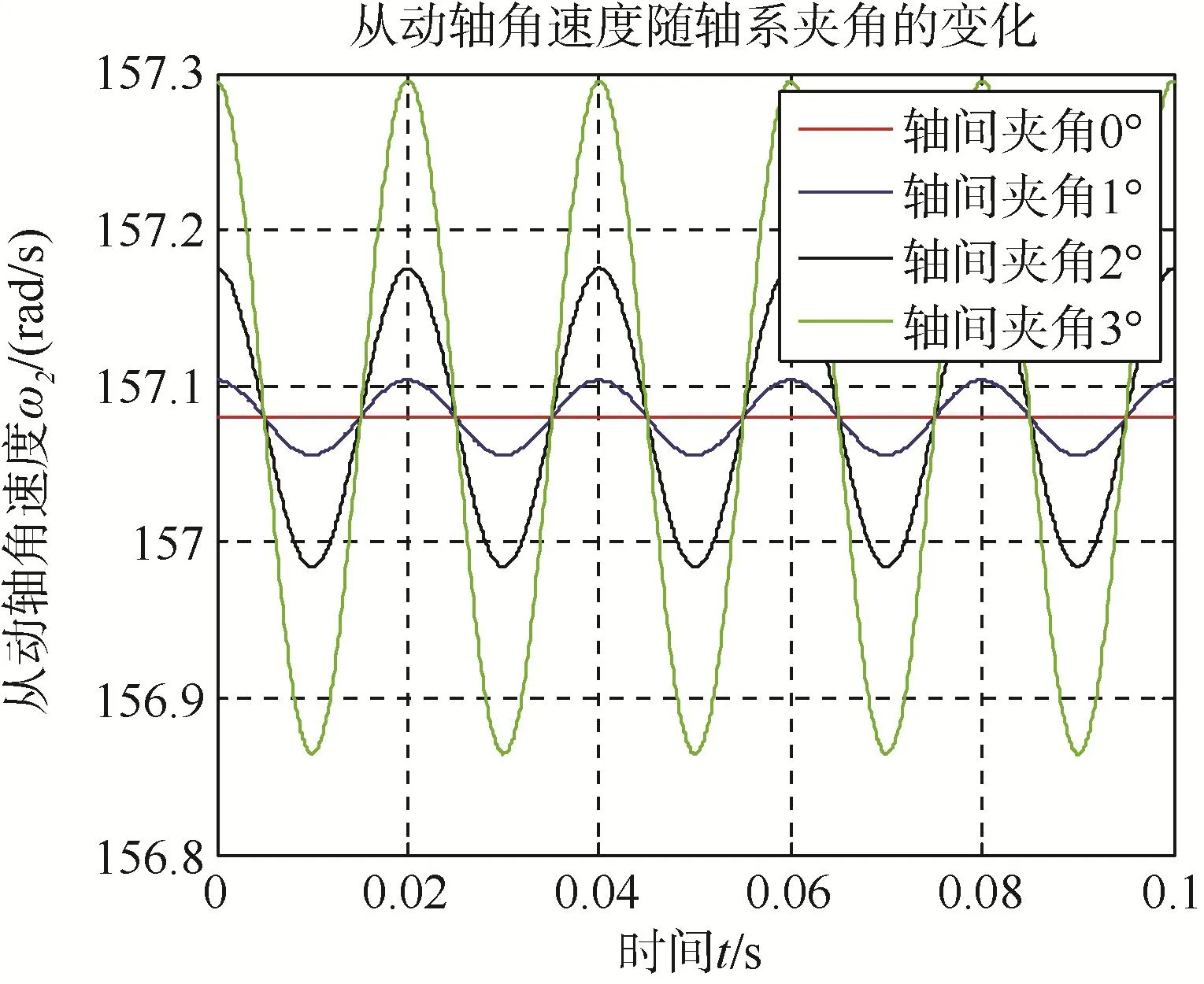
圖2 從動軸角速度隨時間變化Fig.2 Angular velocity of the driven shaft changing with time
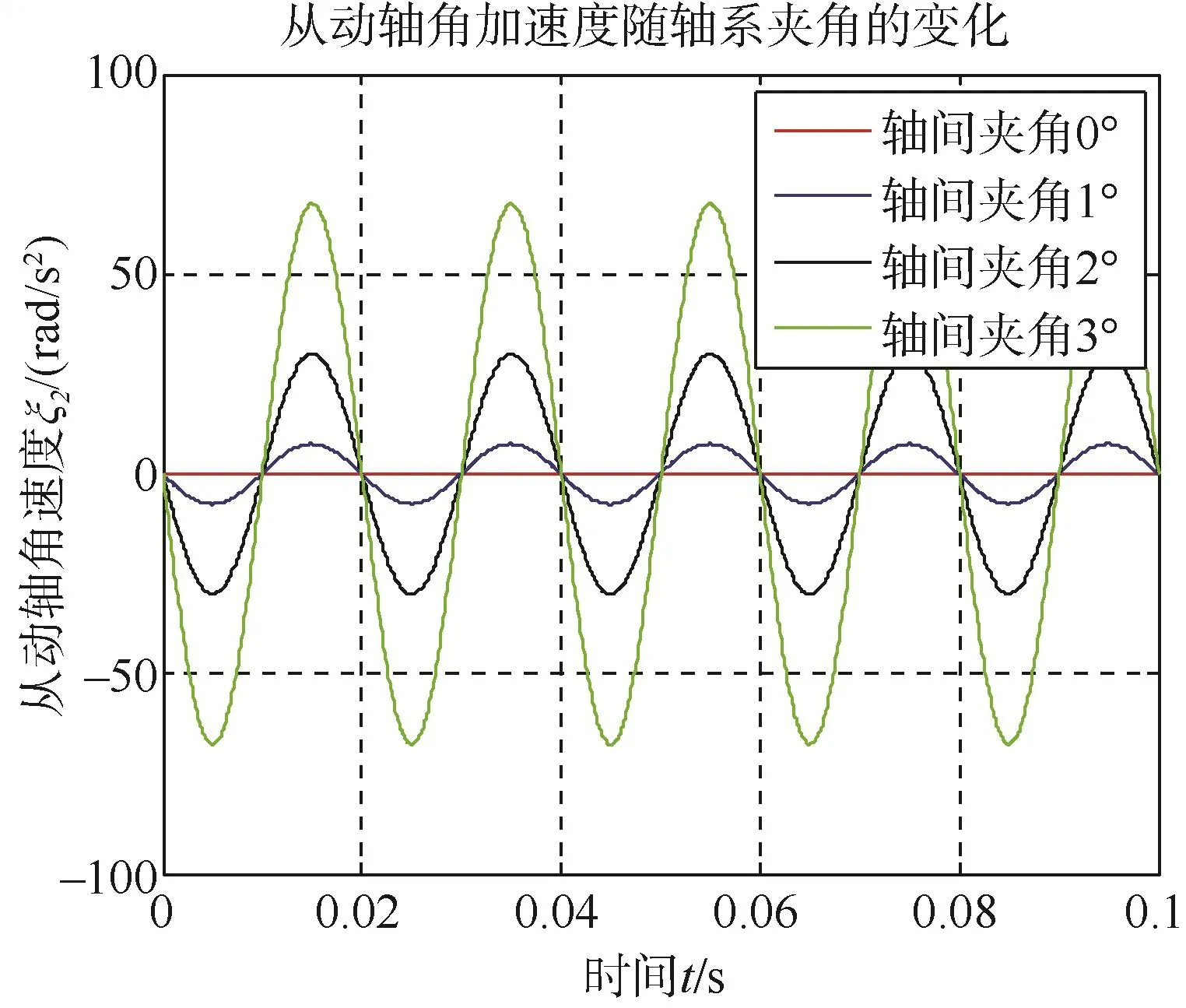
圖3 從動軸角加速度隨時間變化Fig.3 Angular acceleration of the driven shaft changing with time
將式(1)對時間求導,得到從動軸角加速度表達式為

式中:1ξ為主動軸角加速度,2ξ為從動軸角加速度,依式(1)、(2)作出從動軸角速度與從動軸角加速度隨時間變化的關系如圖2-3。
從圖2、圖3可以看出:
1)主動軸每轉一圈,從動軸角速度和角加速度變化經歷了2個周期;
2)隨著主從動軸軸間夾角的增大,從動軸角速度和角加速度幅值也增大。
由上述分析可知,單十字萬向軸從動軸的角速度和角加速度均有較大的周期波動性,這也是其引起系統振動的根本原因。只有當主從動軸的軸線在一條直線上時,主從動軸才能實現等速傳動,而只要主從動軸存在夾角,單十字萬向軸的傳動就是不等速傳動。
2 存在基座偏斜角時萬向軸傳動特性
由于安裝調試精度的影響,輸入軸端和輸出軸端可能存在一定的角度誤差,以輸出軸端為基準,將系統角度偏移量累積到輸出軸端,設總的基座偏斜角為β。
圖4中用α表示軸間夾角角度,β表示基座安裝偏斜角度。
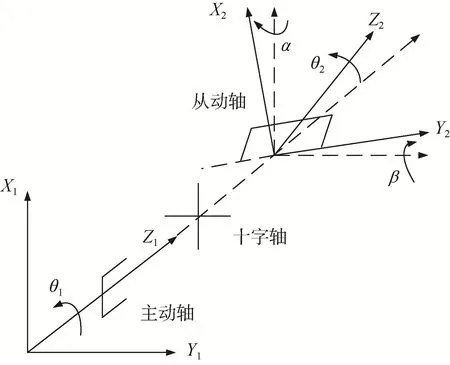
圖4 動力系統安裝坐標圖Fig.4 Installation coordinate system for power system
坐標系 X1Y1Z1是主動軸上與機架固連的定坐標系,坐標原點在軸叉的中點,x1y1z1是主動軸上與主動軸固連的動坐標系,它隨主動軸一起轉動,坐標系X2Y2Z2是從動軸上與機架固連的定坐標系,x2y2z2是從動軸上與從動軸固連的動坐標系,它隨從動軸一起轉動。各坐標系間的關系是:X1Y1Z1繞Z1軸旋轉θ1角度得到x1y1z1,X2Y2Z2繞Z2軸旋轉θ2角度得到x2y2z2,X1Y1Z1繞Y1軸旋轉α角度得到中間坐標系 X′Y′Z′,X′Y′Z′再繞 X’軸旋轉β角度得到X2Y2Z2。
經坐標變換和坐標向量幾何關系計算化簡可得:

將式(3)對時間求導可得角速度波動公式:

對式(4)求導得角加速度波動公式:
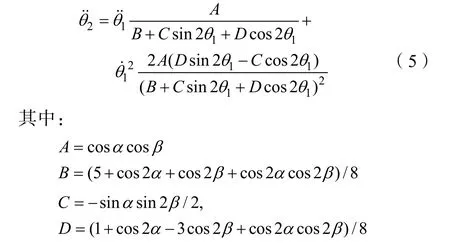
采用MATLAB對軸間夾角和基座傾斜角同時存在的情況進行仿真,軸間夾角取值范圍為1°~3°,基座傾斜角取值范圍為1°~3°,仿真結果如圖5-6。
從圖5-6可以看出:
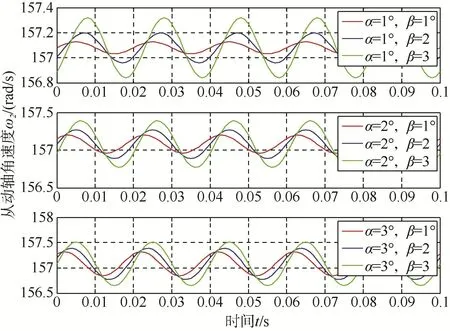
圖5 從動軸角速度隨時間的變化Fig.5 Angular velocity of the driven shaft changing with time
1)主動軸每轉一圈,主從動軸加速度比值、從動軸角速度、從動軸角加速度變化都經歷了2個周期;
2)相同軸間夾角情況下,從動軸角速度和角加速度隨著基座傾斜角的增大而增大,且從動軸加速度幅值存在相位差;
3)相同軸間夾角情況下,基座偏斜角的存在增大了從動軸角速度和角加速度的幅值。
當主動軸以1 500 r/min勻速運動時,各動力學量隨軸間夾角和基座傾角的變化情況如表1。
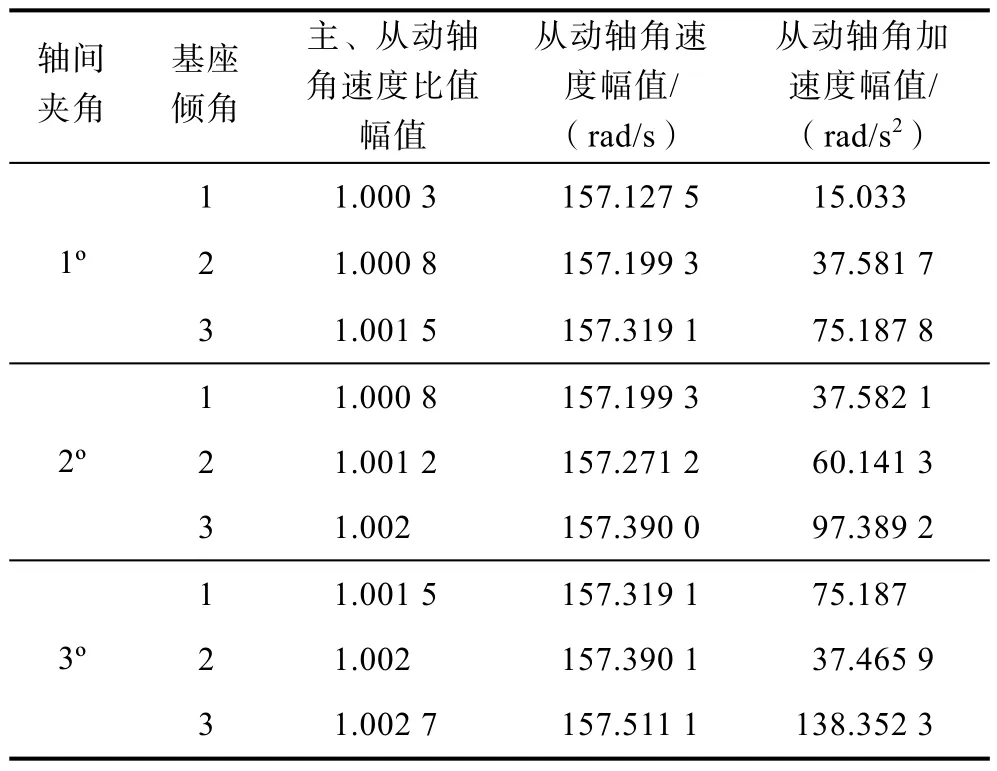
表1 軸間夾角和基座傾角存在時系統運動學量變化情況Tabel 1 Change of system dynamical variables with shaft angle and pedestal angle
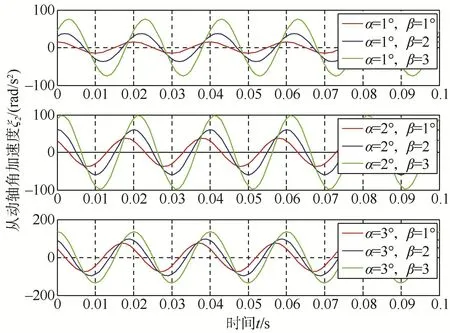
圖6 從動軸角加速度隨時間的變化Fig.6 Angular acceleration of the driven shaft changing with time
由上述分析可知,當動力推進系統采用帶有軸間夾角的十字萬向軸時,即使輸入軸處于勻速狀態,輸出軸的運動也是非線性狀態,軸系傾角的存在使得系統的動力學量都有所增加,其中從動軸角加速度增加尤為明顯,這表明軸系傾角的存在增大了軸系輸出端的偏載,使得系統的動力學狀態更加復雜,從而產生異常的振動和噪聲輻射。
3 推進系統振動測試
本文針對十字萬向軸不同的軸間夾角和輸出端電機底座不同傾角進行了相應的振動測試,其中十字萬向軸的軸間夾角可調狀態為0°和4°,輸出端電機底座的可調狀態為0°、2°和4°,試驗時柴油機運行工況為轉速1 500 r/min ,負載10 kW。取柴油機斜對角的兩個機腳分別布設一個加速度傳感器,在電機的 4個機腳分別布設一個加速度傳感器。對所采集到的數據進行振動加速度譜級、總級分析[6-7]。
3.1 柴油機機腳振動
當軸間夾角分別為0°和4°,電機基座傾角分別為0°、2°、4°時,柴油機機腳的平均振動加速度譜級如圖7-8。
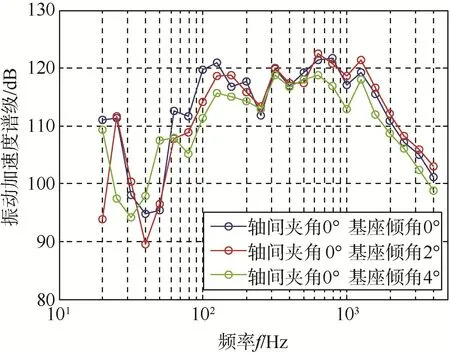
圖7 軸間夾角0°時柴油機機腳譜級Fig.7 Diesel engine’s foot spectrum level at shaft angle of 0°
當軸間夾角為0°時,從圖7中可以看出:在中心頻率25~63 Hz內,柴油機機腳在基座傾角0°與基座傾角2°時的1/3倍頻程平均加速度譜級大小基本相等,且均小于基座傾角4°時的譜級;在中心頻率63~250 Hz內,不同角度對應的柴油機機腳1/3倍頻程平均加速度譜級由大到小依次為基座傾角 0°、基座傾角 2°、基座傾角 4°;在中心頻率250~800 Hz內,柴油機機腳在基座傾角0°與基座傾角2°時的1/3倍頻程平均加速度譜級大小基本相等,且均大于基座傾角4°時的譜級;在中心頻率0.8~4 kHz內,不同角度對應的柴油機機腳1/3倍頻程平均加速度譜級由大到小依次為基座傾角 2°,基座傾角0°,基座傾角4°;柴油機機腳1/3倍頻程平均加速度譜級最大值點出現在軸間夾角 0°,基座傾角2°,中心頻率630 Hz處。
當軸間夾角為4°時,從圖8中可以看出:在中心頻率25~50 Hz內,柴油機機腳在基座傾角0°與基座傾角2°時的1/3倍頻程平均加速度譜級大小基本相等,且均小于基座傾角4°時的譜級;在中心頻率50~100 Hz內,不同角度對應的柴油機機腳1/3倍頻程平均加速度譜級由大到小依次為基座傾角4°、基座傾角 2°、基座傾角 0°;在中心頻率 200~800 Hz內,不同角度對應的柴油機機腳 1/3倍頻程平均加速度譜級由大到小依次為基座傾角4°、基座傾角2°、基座傾角0°;在中心頻率0.8~4 kHz內,不同角度對應的柴油機機腳1/3倍頻程平均加速度譜級由大到小依次為基座傾角 2°,基座傾角 0°,基座傾角4°;柴油機機腳1/3倍頻程平均加速度譜級最大值點出現在軸間夾角4°、基座傾角0°,中心頻率125 Hz處。
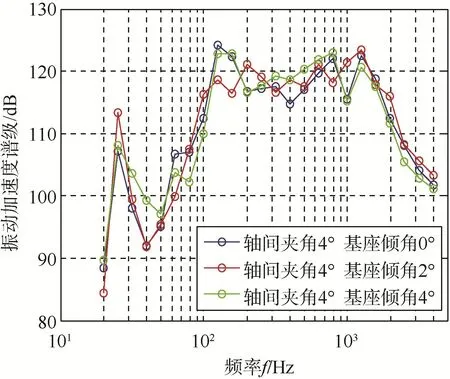
圖8 軸間夾角4°時柴油機機腳譜級Fig.8 Diesel engine’s foot spectrum level at shaft angle of 4°
3.2 推進電機機腳振動
當軸間夾角為 0°,電機基座傾角分別為 0°、2°、4°時,推進電機機腳的平均振動加速度譜級如圖9-10。
當軸間夾角為 0°時,從圖 9中可以看出:基本在全頻帶內,不同角度對應的電動機機腳1/3倍頻程平均加速度譜級由大到小依次為基座傾角0°,基座傾角2°,基座傾角4°;柴油機機腳1/3倍頻程平均加速度譜級最大值點出現在軸間夾角 0°,基座傾角0°,中心頻率800 Hz處。
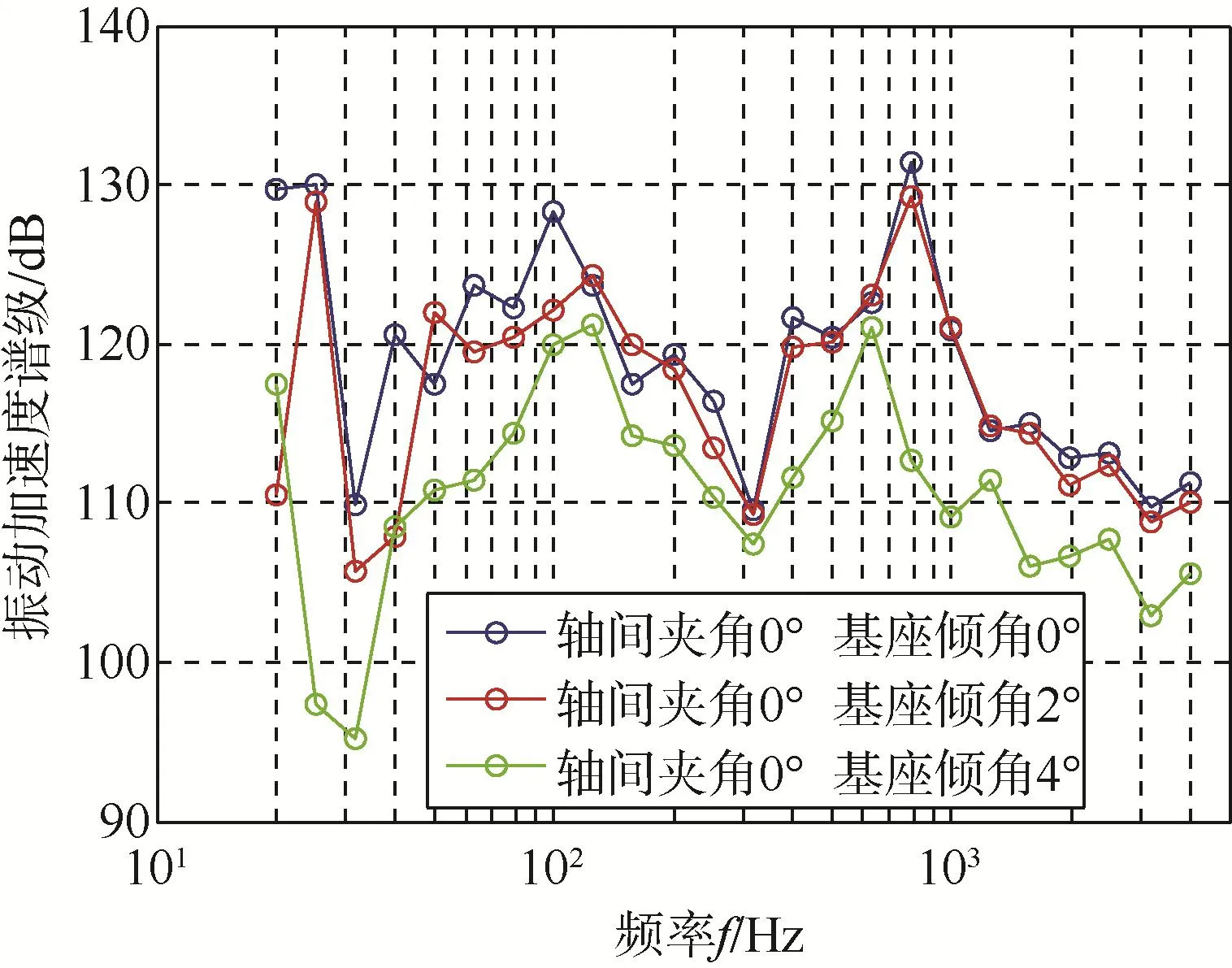
圖9 軸間夾角0°時電動機機腳譜級Fig.9 Electromotor foot’s spectrum level at shaft angle of 0°
當軸間夾角為4°時,從圖10中可以看出:在中心頻率20~63 Hz內,不同角度對應的柴油機機腳 1/3倍頻程平均加速度譜級由大到小依次為基座傾角4°、基座傾角0°、基座傾角2°;在中心頻率63~125 Hz內,不同角度對應的柴油機機腳1/3倍頻程平均加速度譜級由大到小依次為基座傾角2°、基座傾角 0°、基座傾角 4°;在中心頻率 0.25~4 kHz內,基座傾角2°對應的柴油機機腳1/3倍頻程平均加速度譜級最大,基座傾角 0°、基座傾角4°對應的柴油機機腳 1/3倍頻程平均加速度譜級基本相等;柴油機機腳 1/3倍頻程平均加速度譜級最大值點出現在軸間夾角 4°、基座傾角 0°,中心頻率125 Hz處。
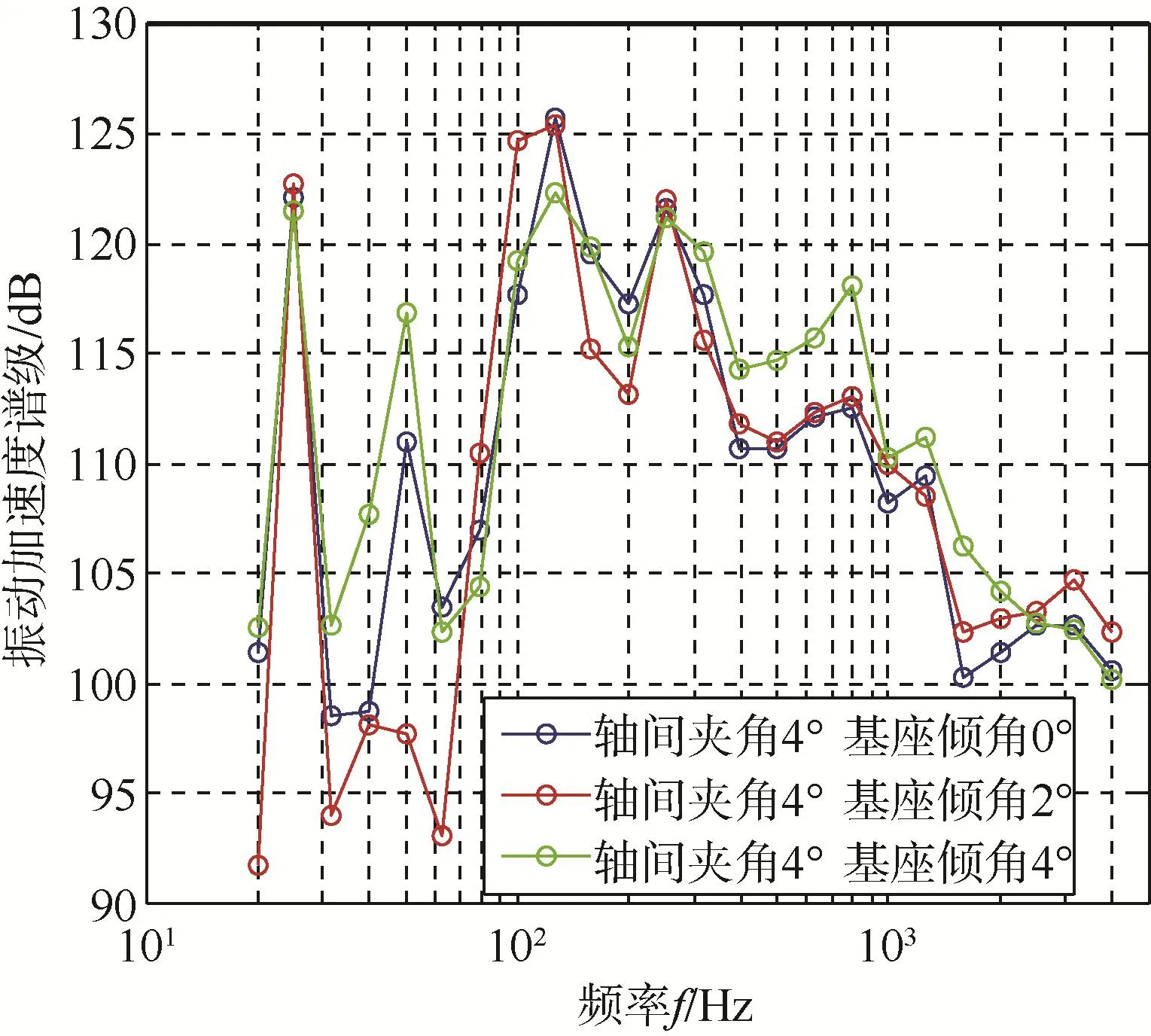
圖10 軸間夾角4°時電動機機腳譜級Fig.10 Electromotor foot’s spectrum level at shaft angle of 4°
3.3 推進系統振動總級
各狀態下柴油機機腳和推進電機機腳的振動加速度總級如表2。
由表2可以看出:軸間夾角0°/基座傾角4°時,柴油機機腳的平均總級最小,為124.44 dB;軸間夾角 4°/基座傾角 2°時,柴油機機腳的平均總級最大,為127.69 dB;軸間夾角0°/基座傾角4°時,推進電機機腳的平均總級最小,為124.45 dB;軸間夾角 0°/基座傾角 0°時,推進電機機腳的平均總級最大,為133.48 dB。

表2 柴油機機腳和推進電機機腳的振動加速度總級Tabel 2 Vibration acceleration overall level of diesel engine foot and propulsion motor foot
4 結束語
本文通過MATLAB仿真分析了在存在軸系傾角和基座安裝角情況下十字萬向軸的動力學特性,明確了其產生運動波動和振動激勵的原理,并對不同軸系傾角和基座安裝角狀態下的推進系統進行了水下振動輻射噪聲測試,試驗結果表明不同的軸系傾角和基座安裝角狀態下,系統的振動噪聲總級也會不同,且在軸系傾角和基座安裝角都為零的情況小,推進系統的振動噪聲并不是最小,考慮與系統的振動傳遞和振動耦合,在安裝調節范圍內,必然存在一個軸系傾角和基座安裝角的最佳狀態,使得由于軸系傾角和基座安裝角引起的推進系統振動噪聲最小。為使航行體達到更好的聲輻射性能,后續可以進行全系統建模仿真分析,并結合試驗測試的方法,找到軸系傾角和基座安裝角的最佳匹配狀態,從而提高航行體的航行隱蔽性[8-9]。
