一種自適應平滑濾波算法
2021-11-05 07:53:58鄭州聯睿電子科技有限公司馬琳琳
電子世界 2021年17期
關鍵詞:效果
鄭州聯睿電子科技有限公司 馬琳琳 李 冀 肖 巖
本文提出了一種基于sigmoid函數的自適應平滑濾波算法。該算法根據定位目標的運動特性,自適應地改變濾波器的權重,在平滑的過程中較好的解決了定位目標運動、靜止對濾波要求的矛盾。實驗結果表明,該算法具有良好的平滑濾波性能,尤其是對定位目標靜止時平滑效果尤為明顯,而且算法簡單,易于實時處理,可廣泛應用于無線定位系統中定位目標的軌跡平滑。
隨著無線定位技術的發展,室內定位導航技術受到越來越多人的關注。相比于室外衛星定位導航技術,室內定位導航應用的范圍較小,定位精度較高,但是由于無線信號傳輸的不穩定性及多徑效應等問題,單純采用無線定位技術解算得到的定位點變化方差大、移動不平緩,從而嚴重影響了室內定位系統的定位性能和穩定性。
目前常用的軌跡平滑濾波算法有:中值濾波、均值濾波、限幅濾波等,其中中值濾波、限幅濾波對較大的抖動點有顯著的平滑特性,均值濾波雖然對較小的抖動點有平滑特性,但是會影響定位目標的運動特性,不能很好的保留定位目標的運動特征信息。
本文通過分析定位目標的運動特征,以運動特征為參數采用sigmoid函數計算權重,實現定位點的平滑濾波,尤其是靜態定位點的平滑濾波。
1 sigmoid函數簡介
Sigmoid函數是一個在生物學中常見的S型的函數,也稱為S型生長曲線,是BP神經網絡中常用的非線性作用函數,由下列公式定義:

其函數曲線如圖1所示。

圖1 sigmoid函數曲線
滿足的性質:
(1)對稱性,關于(0,0.5)中心對稱;
(2)值域在0和1之間。
在信息科學中,由于其單調遞增以及反函數單調遞增等性質,Sigmoid函數常被用作神經網絡的閾值函數,將變量映射到0,1之間。
2 基于sigmoid函數的自適應濾波平滑算法
2.1 自適應濾波平滑算法原理
利用定位目標的速度值動態調整權重來適應不同的運動狀態:當速度小時,歷史數據的權重較大;當速度大時,當前數據的權重較大。通過上述的處理,從而實現靜止點的收斂穩定。

其中,k為定位序號,v(k)為當前定位點推算的速度值,w(v(k))為以速度值為參數的權重計算函數。
2.2 基于sigmoid函數的權重函數構造
標準的sigmoid函數的值域為[0,1],滿足權重的要求,但是如何將速度值映射到該值域是重點考慮的問題。以室內定位系統常用于定位的目標-行人為例,進行說明。考慮到行人運動的速度,及運動、靜止平滑效果的折中權衡,選擇0.5m/s為權重1/2的映射點,則sigmoid函數偏移處理后的表達式為:

2.3 自適應濾波算法的實現
基于sigmoid函數的自適應平滑濾波算法的步驟為:1)根據連續兩次的定位點及定位時間間隔推算定位目標的運動速度;2)由運動速度計算權重;3)根據權重計算本時刻定位點的平滑濾波結果。
3 實驗結果與分析
在驗證試驗中,我們采用聯睿電子研發的U-Loc室內厘米級實時定位系統進行數據的采集,然后利用本文的算法分別對靜點及動態定位點的平滑濾波性能進行分析對比。
圖2所示為靜點的平滑濾波效果,通過對比可以明顯看出濾波后的定位點更加集中,穩定性更高,表1中統計的每個坐標軸的標準差進一步驗證了該結論。

圖2 靜點的平滑濾波效果對比
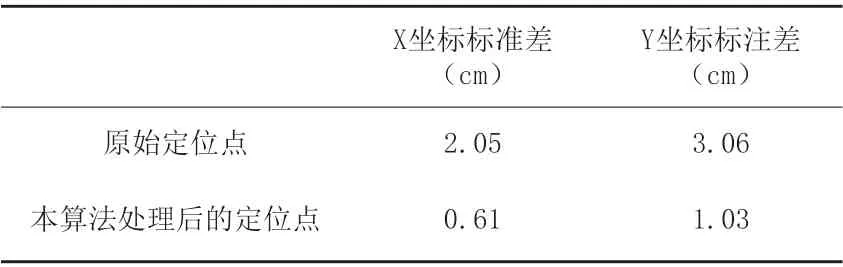
表1 定位點坐標值的標準差
圖3所示為動態定位點的平滑濾波效果,可以看出:動態定位軌跡也具有明顯的平滑效果,驗證了該算法的有效性。

圖3 動態定位點的平滑濾波效果
本文討論了一種基于sigmoid函數的自適應平滑濾波算法。該濾波算法利用sigmoid函數將速度值映射為平滑濾波的權重,可以實時根據速度大小自適應調整濾波權重。實驗結果表明,算法具有明顯的平滑濾波效果,尤其是對靜態定位點的平滑效果較明顯,且本算法處理簡單,滿足室內定位實時性的要求。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
好日子(2021年8期)2021-11-04 09:02:46
小學生學習指導(爆笑校園)(2020年6期)2020-07-03 10:01:10
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
中華詩詞(2018年11期)2018-03-26 06:41:34
小學生學習指導(低年級)(2017年11期)2017-10-23 01:32:36
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫藥科學(2015年19期)2015-02-27 12:33:11
