
基于目指信息的潛射線導魚雷環(huán)形搜索方案研究?
2021-11-11 14:22:44李家騰范學滿
艦船電子工程 2021年10期
關鍵詞:信息
李家騰 劉 劍 范學滿
(海軍潛艇學院 青島 266199)
1 引言
隨著魚雷航程的提高,發(fā)射平臺的性能限制了對目標的偵察探測能力,在魚雷遠距攻擊中,僅僅依靠潛艇來獲取目標信息較為困難,無法充分發(fā)揮魚雷航程遠的優(yōu)勢,必須考慮遠程目標指示系統(tǒng)(下文簡稱目指)的信息支援。但是在復雜電磁環(huán)境作戰(zhàn)條件下目指信息也存在著信息不連續(xù)、目指精度低、存在時間延遲等問題[1],此時若采取魚雷射前一次性目標指示實施魚雷遠距攻擊的方法,將會大大降低魚雷捕獲目標的概率,增加魚雷攻擊的難度甚至根本無法實施。
針對遠距離、大誤差條件下目標散布區(qū)域較大的問題,提高魚雷捕獲目標概率,文獻[1]提出了利用目指信息引導線導+聲自導魚雷實施攻擊的思想;文獻[2]通過分析目指信息引導下的魚雷遠距攻擊流程,建立了線導魚雷遠距攻擊數(shù)學模型;文獻[3~6]研究了魚雷機動搜索方案。但在可查閱的文獻中,缺乏對目指信息保障下潛射線導魚雷環(huán)形搜索的研究。本文在分析目指信息保障下潛射線導魚雷現(xiàn)在時刻推算方位導引法的基礎上,對環(huán)形搜索半徑、環(huán)形搜索時機、環(huán)形搜索初始及結束后直航航向等開展研究。
2 基于目指信息的線導魚雷攻擊模型
2.1 目指信息傳輸模型


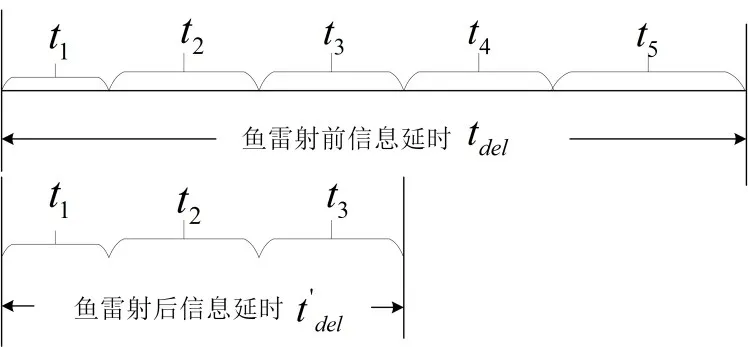
圖1 目標指示信息時間延遲組成


圖2 目標指示信息傳輸時間軸

2.2 目標運動假設及其模型
2)目標運動模型[2]
假設目標做勻速直線運動,則目標任意時刻的坐標可由式(2)進行推算:

式中:Xm(t)、Ym(t)為目標t時刻的坐標,Xm(t-1)、Ym(t-1)為目標t-1時刻的坐標,Vm(t-1)為目標t-1時刻的速度,Cm(t-1)為目標t-1時刻的航向,Δt為仿真時間步長,一般取Δt=1s。
2.3 現(xiàn)在時刻推算方位導引模型
目指信息保障線導魚雷攻擊時,潛艇收到的目標位置信息并不是目標當前時刻的位置,要想將魚雷導引到目標的現(xiàn)在方位上[10],必須根據(jù)提供的目標信息推算目標現(xiàn)在時刻的位置,并將魚雷導引到現(xiàn)在時刻目標方位上,這種導引方法稱為現(xiàn)在時刻推算方位導引法,如圖3所示。

圖3 現(xiàn)在時刻推算方位導引模型

設魚雷初始直航段航向為C0,根據(jù)魚雷遙測數(shù)據(jù)可知魚雷航向CT、航速VT、航深VT和魚雷坐標XT、YT,則魚雷經(jīng)過初始直航段后的魚雷航向和轉(zhuǎn)角為

當n≥2時,目標現(xiàn)在時刻位置坐標為[2]

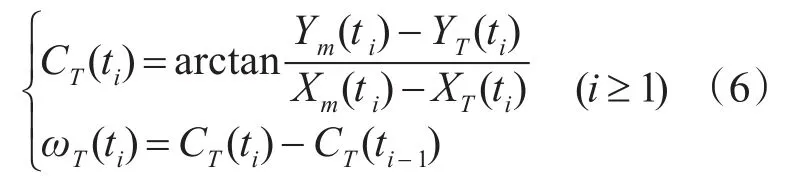
根據(jù)推算的目標現(xiàn)在時刻位置坐標,將魚雷導引到現(xiàn)在時刻目標方位上,可根據(jù)下式求得魚雷航向和魚雷轉(zhuǎn)角:
3 基于目指信息的潛射線導魚雷環(huán)形搜索方案
線導魚雷遠距攻擊關鍵在于線導導引階段和機動搜索階段,前者將線導魚雷導引至目標散布區(qū)域,后者通過設置合適的搜索策略,以較大的概率捕獲目標,從而完成魚雷發(fā)射、導引、搜索、捕獲直至完成攻擊的過程。魚雷機動搜索可在更大范圍覆蓋目標位置散布[1],針對這一目的,筆者提出了一種環(huán)形搜索方案,其基本過程如圖4所示。
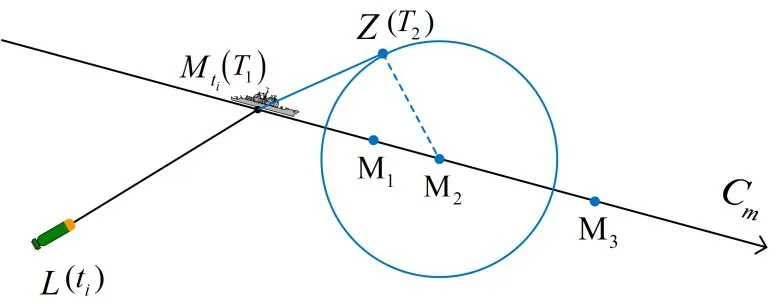
圖4 過線環(huán)形搜索

3.1 目標散布區(qū)域半徑的數(shù)學描述
將引導兵力探測到目標信息的時刻作為初始時刻,設初始時刻目標的位置點 Xm和Ym,速度Vm,航向Cm,四個量有獨立的密度函數(shù),服從正態(tài)分布,其標準差分別為 σX、σY、σV、σC,其中 σX、σY為 Xm、Ym的標準差,在引導兵力通報時,一般提供圓概率誤差CEP,此時σX、σY具有同樣的數(shù)值,即 σX=σY=0.84932CEP,其中心值為 X0、Y0、V0、C0。則t時刻目標位置散布的近似二維正態(tài)分布密度函數(shù)為[11]

式中:Δx,Δy為目標實際位置與散布中心點位置的差異量,r為相關系數(shù),σ1、σ2為橫軸、縱軸方向標準差。令

文獻[11]詳細推導了目標位置散布的概率密度公式,本文不再贅述。根據(jù)概率論,隨機變量分布在 μ±2σ(隨機誤差在±2σ范圍內(nèi))的概率達0.9544[12]。因此,設定目標位置散布在長軸為a=2σ1,短軸為 b=2σ2的橢圓區(qū)域內(nèi),為確保目標位置在圓域內(nèi)的概率不低于在橢圓域內(nèi)的概率,故取目標散布區(qū)域半徑R=max(a,b)。
由以上分析可知,目標散布區(qū)域半徑可表示為時間t的函數(shù):

式中:V0、C0分別為偵察兵力探測的目標速度和航向,σX、σY分別為 Xm、Ym的標準差,σV為速度標準差,σC為航向標準差,t為從引導兵力探測到目標信息的時刻到需要求解目標散布區(qū)域半徑的時刻所經(jīng)歷的時間。
3.2 魚雷執(zhí)行環(huán)形搜索時刻的求解
魚雷越過目標航向線后,需經(jīng)過一段時間直航后才執(zhí)行環(huán)形搜索,下面以攻敵右舷為例,計算執(zhí)行環(huán)形搜索的時刻。


由此可求解T1:

設T2時刻魚雷開始執(zhí)行環(huán)形搜索,此時魚雷航行至Z點,目標航行至M2點,M2Z為環(huán)形搜索的半徑,可用下式求得:




聯(lián)立式(14)~(20),采用迭代法可求解T2。
3.3 魚雷越過目標航向線后的直航航向的求解

可得魚雷直航航向為

若攻敵左舷,魚雷直航航向為

3.4 環(huán)形搜索一周后魚雷航向的求解
魚雷環(huán)形搜索一周后,若未能搜索到目標,且在魚雷執(zhí)行環(huán)形搜索的過程中未接收到新的目指信息,則當魚雷環(huán)形一周后,將魚雷導引到推算的目標現(xiàn)在時刻位置,設魚雷環(huán)形一周結束后的時刻為tk時刻,則此時魚雷航向為



4 基于目指信息的線導魚雷捕獲概率仿真
4.1 線導魚雷捕獲概率仿真

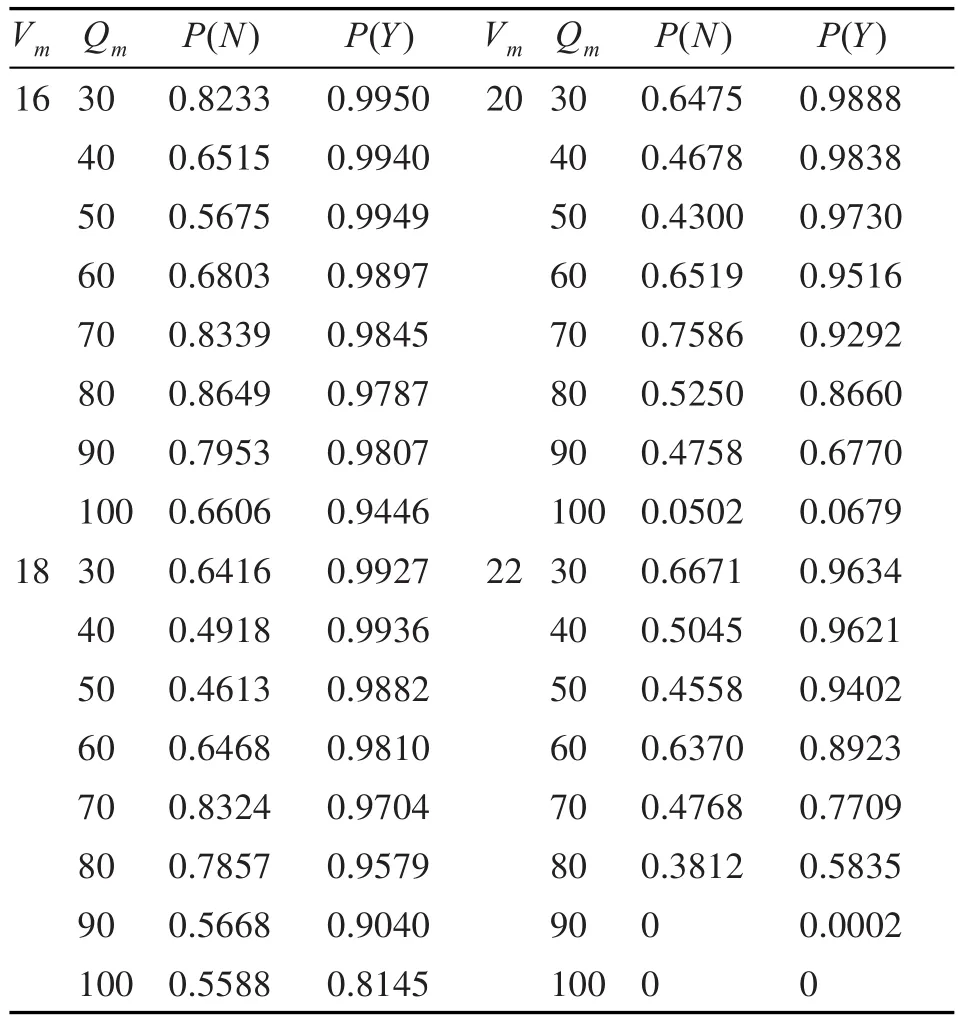
表1 D0=15n mile魚雷捕獲概率對比表

表2 D0=20n mile魚雷捕獲概率對比表
表中,Vm表示目標航速,單位為節(jié);Qm表示初始敵舷角,單位為度;P(N)、P(Y)分別表示不采用和采用過線環(huán)形搜索所對應的捕獲目標概率。
為更直觀顯示采用和不采用過線環(huán)形搜索法魚雷捕獲目標概率的區(qū)別,繪制魚雷捕獲目標概率對比表,如圖1、圖2所示。
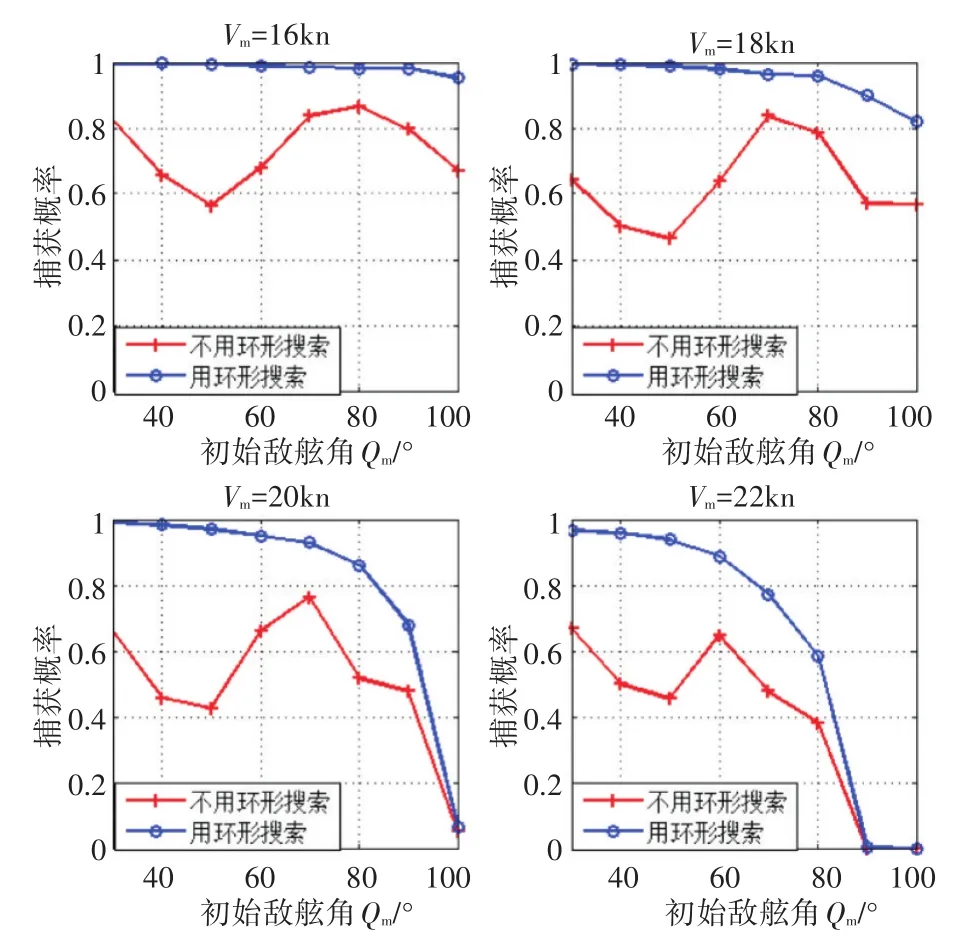
圖5 D0=15n mile魚雷捕獲目標概率圖
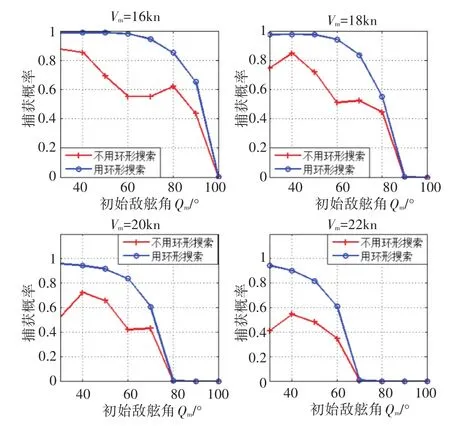
圖6 D0=20n mile魚雷捕獲目標概率圖
圖中,橫坐標表示初始敵舷角Qm,單位為度;縱坐標表示魚雷捕獲目標概率;用‘+’連接的曲線表示不采用過線環(huán)形搜索;用‘〇’連接的曲線表示采用過線環(huán)形搜索。
4.2 結果分析
由以上數(shù)據(jù)可以得出以下結論:
1)相較于單純使用現(xiàn)在時刻推算方位導引法實施魚雷攻擊,采用過線環(huán)形搜索法可大幅提高魚雷捕獲目標概率。
2)相同初距和敵舷角情況下,魚雷捕獲目標概率隨敵速的增大而減小;相同敵速和敵舷角情況下,魚雷捕獲目標概率隨初距的增大而減小。因此,更遠的魚雷航程和更快的雷速將是未來戰(zhàn)上克敵制勝的關鍵因素。
3)相同初距和敵速情況下,采用過線環(huán)形搜索法相比于不采用過線環(huán)形搜索法,魚雷捕獲目標概率隨初始敵舷角增大的變化更為穩(wěn)定,且呈逐漸降低的趨勢。這就要求指揮員在收到目指信息后,盡快根據(jù)目標信息確定初始態(tài)勢,當處于有利態(tài)勢時應盡快實施攻擊,以免因敵舷角過大而貽誤戰(zhàn)機。
5 結語
潛艇在目指信息引導下使用線導魚雷實施遠距攻擊時,當魚雷越過目標航向線后采用環(huán)形搜索方法可有效提高魚雷捕獲目標的概率,提高魚雷作戰(zhàn)效能。同時初始距離、初始敵舷角、目標速度等因素對魚雷捕獲目標概率也有較大影響,在復雜戰(zhàn)場環(huán)境下,潛艇指揮員應結合具體態(tài)勢,統(tǒng)籌各種因素的影響,靈活運用,保證潛射線導魚雷的攻擊效果。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
