考慮車輛跟馳作用和通信時延的網聯車輛隊列軌跡跟蹤控制
2021-11-13 08:05:04李永福鄔昌強唐曉銘
自動化學報 2021年9期
李永福 鄔昌強 朱 浩 唐曉銘
1.重慶郵電大學自動化學院智能空地協同控制重慶市高校重點實驗室 重慶 400065
近年來,隨著車車/車路(Vehicle-to-vehicle/vehicle-to-infrastructure,V2V/V2I,簡稱V2X)[1]通信技術的迅速發展,使智能網聯車輛(Connected vehicles,CVs)[2-4]能夠通過V2X 通信技術實現車、路和后臺的互聯互通,從而為智能交通系統的環境感知、建模、協同控制及管理決策提供了完備的信息.軌跡跟蹤控制(Trajectory tracking control)[5-6]是智能網聯車輛運動控制的關鍵問題,軌跡跟蹤控制形成的車輛隊列行駛模式可以有效地減緩交通擁堵、減少能源消耗和增加道路通行能力[7-9].因此,車輛軌跡跟蹤控制問題已經成為中外學者研究的熱點,絕大部分研究主要通過保證位置跟蹤誤差和速度的一致性來解決軌跡跟蹤控制問題.
對于車輛軌跡跟蹤控制問題,控制理論和交通工程這兩個角度有著不同的關注點.從控制理論的角度出發,是將車輛看作一個獨立的節點.然后,專注于車輛狀態信息,設計軌跡跟蹤控制器來確保軌跡跟蹤性能.然而,車輛運動之間的耦合關系和速度約束經常被忽略,導致負的位置跟蹤誤差和負速度的出現,即意味著車輛間的安全距離不能被保證,更嚴重的是追尾事故有可能發生.從交通工程的角度出發,主要提出合適的交通流模型來刻畫車輛間的非線性關系.
在車輛軌跡跟蹤控制的文獻中,軌跡跟蹤控制方法主要分為線性控制和非線性控制.在線性控制方面,基于幾何學的控制框架,Invernizzi 和Lovera[10]提出一種控制律來保證位置跟蹤誤差漸進收斂到零.考慮一個互聯的領導跟隨多車系統,領導者車輛和跟隨者車輛的狀態信息都能夠相互感知,Cai和Hu[11]僅利用車輛的狀態信息提出一種分布式軌跡跟蹤控制律.基于相鄰車輛狀態估計,Hong 等[12]提出一種跟蹤控制策略來解決時變通信拓撲下的多車系統一致性問題.結合前饋控制和魯棒控制,Kayacan等[13]基于軌跡跟蹤誤差模型提出了一種軌跡跟蹤控制策略,實現了車輛跟蹤直線道路和曲線道路軌跡.然而,車輛是一個高度非線性和強耦合系統,線性的軌跡跟蹤控制算法有一定的局限性,不能刻畫車輛間的非線性關系.
在非線性控制方面.基于虛擬結構方法,跟隨者車輛跟蹤虛擬車輛預定的軌跡,Zhang 等[14]提出了一種協同路徑跟蹤控制律,從而讓車輛保持一個期望的隊列.利用人工勢場法與模型預測控制理論,徐楊等[15]提出一種針對無人車輛軌跡規劃和跟蹤控制的控制方法,根據參考軌跡來調節縱橫向輸入以實現跟蹤控制.Liang 等[16]通過分析狀態變量和控制變量之間的函數關系,利用滑模控制方法設計的速度控制律,提高了軌跡跟蹤誤差收斂速度和增強了抗干擾能力.針對模型參數不確定的問題,Aguiar等[17]基于反步法提出了一種自適應軌跡跟蹤控制方法.在此基礎之上,Guo 等[18]研究了考慮參數不確定和額外的干擾的問題,提出一種自適應非線性軌跡跟蹤控制策略.針對未知擾動的問題,沈智鵬等[19]引入神經網絡對模型不確定性部分進行逼近,設計一種非線性增益遞歸滑模的軌跡跟蹤動態自適應神經網絡控制器,該控制器對系統模塊參數攝動以及外界擾動具有較強的魯棒性,并且跟蹤響應快和精度高.Yu 和Liu[20]通過考慮速度干擾提出了一種自適應軌跡跟蹤控制方法,實現了無界擾動的抑制和跟蹤誤差的漸近收斂.Wang[21]利用神經網絡和自適應估計的方法,通過考慮模型參數和車輛動力學不確定性問題,提出一種分布式自適應協同軌跡跟蹤控制策略.
針對通信時延的問題,Peters 等[22]考慮通信時延提出一種領導跟隨結構控制策略,保證了車輛隊列的串穩定性.基于滑模控制方法,Kim 等[23]提出一種快速終端滑模時延控制器來保證車輛位置跟蹤誤差漸進收斂.采用分層框架的方法來降低控制器設計和分析的復雜性,Zhang 等[24]考慮時延和參數不確定性提出一種自適應滑模控制器.考慮通信時延和參數不確定性,Yan 等[25]提出了一種協同軌跡跟蹤控制策略,實現了多車的協同跟蹤任務.然而,上述的控制算法忽略了車輛跟馳作用,導致負的位置跟蹤誤差出現在文獻[20-21]和負速度出現在文獻[14]中.最近,Song 等[26]考慮車輛跟馳作用來研究車輛軌跡跟蹤控制問題,但采用線性的方法來描述車輛間的關系,并不能夠完全刻畫車輛間的非線性關系.
目前,車輛軌跡跟蹤問題最主要的挑戰是在設計控制算法時考慮車輛間的非線性關系,使所提控制器不僅保證位置跟蹤誤差收斂到零,而且使車輛運動規律符合交通流理論,因此需要提出一種更實際的控制器來解決軌跡跟蹤問題.為了解決以上提到的問題,我們之前的工作[6]考慮車輛跟馳作用來解決智能網聯車輛軌跡跟蹤問題.這個工作專注于一個理想的通信環境和領導者車輛速度恒定,但是沒有考慮車車通信過程中存在的通信時延問題.
本文的主要貢獻如下:1)在車輛互聯環境中,提出一種雙向領導跟隨通信拓撲來描述車輛間的通信連接,隊列內的車輛可以通過雙向領導跟隨通信拓撲進行信息交互;2)不同于文獻[14,20-21],設計控制器時忽略了車輛跟馳作用,本文考慮車輛跟馳作用和通信時延,提出一種分布式非線性軌跡跟蹤控制器.所提控制器不僅保證位置跟蹤誤差收斂到原點,而且使車輛運動規律符合交通流理論,即避免了負的位置誤差和負速度出現;3)在仿真實驗中,考慮速度干擾作用于領導者車輛,設計三種場景:無時延、同質時延和異質時延進行數值仿真實驗,數值仿真實驗證明了所提控制器的有效性.
本文結構如下:第1 節給出了預備知識及問題描述;第2 節提出一種非線性軌跡跟蹤控制器,然后給出了所提控制器穩定性的證明;第3 節給出了仿真實驗與實驗結果分析和對比;第4 節為本文結論.
1 預備知識及問題描述
如圖1所示的交通場景中,由n輛智能網聯車輛組成的車輛隊列行駛在道路上,車輛隊列包含一個領導者車輛(標記為 Vehicle leader)和n-1個跟隨者車輛(標記為 Vehicle 1~Vehiclen-1).初始時刻,車輛的初始狀態不同,相鄰車輛之間的初始間距是不相等的.如圖2所示,因此本文通過考慮車輛跟馳作用和有界的通信時延提出一個分布式非線性控制器,所提控制器保證跟隨者車輛能夠跟蹤領導者車輛軌跡并和領導者保持期望的間距Di,L,其中,包括跟隨車輛和領導者之間期望的縱向和側向間距.

圖1 雙向領導跟隨通信拓撲示意圖Fig.1 Information flow of BDLF communication topology

圖2 軌跡跟蹤示意圖Fig.2 Trajectory tracking of follower vehicle i profile
1.1 車輛模型


1.2 圖論

1.3 控制目標

1.4 軌跡跟蹤控制框架
為了解決智能網聯車輛軌跡跟蹤問題,本節提出了軌跡跟蹤控制框架.如圖3所示,該軌跡跟蹤

圖3 軌跡跟蹤控制框架Fig.3 Trajectory tracking control framework
控制框架由產生領導者車輛軌跡、設計控制器和得到跟隨者車輛軌跡三部分組成.
首先,領導者軌跡由初始設定的領導者速度和初始位置產生,位置跟蹤誤差通過坐標變換定義得到.然后,通過考慮車輛跟馳作用、通信時延和跟隨者與領導者車輛間的間距差和速度差,提出一種分布式非線性軌跡跟蹤控制器.最后,根據車輛運動學模型(1)積分可以得到跟隨者車輛的軌跡.
2 控制器設計及穩定性分析
2.1 控制器設計
為解決在第1 節中提出的問題,基于車輛動力學模型,本文考慮車輛跟馳作用和有界的通信時延提出一種分布式非線性軌跡跟蹤控制器.所提控制器如下:


2.2 穩定性分析


3 數值仿真
在本節中,通過數值仿真實驗來驗證所提出的軌跡跟蹤控制器的性能.智能網聯車輛隊列由1 個領導者和5 個跟隨者車輛組成,此外,為了研究通信時延對軌跡跟蹤性能的影響,進行無時延、兩組同質時延和異質時延數值仿真實驗.
總而言之,房地產行業發展對推動我國整體經濟發展有著重要作用,降低房地產金融風險是當前解決房地產行業問題的重中之重。因此,實施有效的房地產金融風險管理及應對策略,開拓多元化的融資渠道,加強政府宏觀調控,建立并落實個人信用制度,從各個方面將房地產金融風險降到最低,保證房地產行業健康有序的發展。
3.1 仿真設置
對6 輛智能網聯車組成的車輛隊列進行數值仿真,領導者車輛的初始條件為:xL(0)=45 m ,θL(0)=0 rad和ωL(0)=0 rad/s. 假設頭車做勻速運動,為研究所提車輛軌跡跟蹤控制器的抗干擾能力,速度干擾作用于領導者車輛,即:uL(t)=kυ+ξL(t),其中kυ=10 m/s
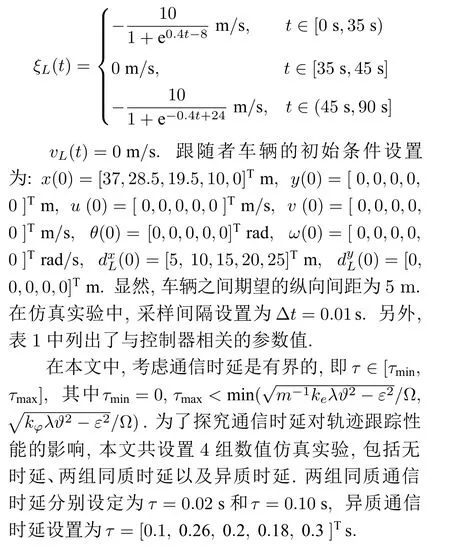

表1 控制器參數Table 1 Controller parameters
3.2 結果討論
仿真結果如圖4~9所示.圖4 給出了在所提控制器下的位置軌跡圖.圖4 表明,在設置的無時延、兩組同質時延和異質時延4 個場景里,隊列內的5個跟隨者車輛可以平穩地跟蹤領導者車輛軌跡.當領導者車輛受速度的干擾時,在本文所提控制器(5)和(6)作用下,隊列內的所有跟隨者車輛速度也能收斂到和領導者車輛速度一致,并保持期望的安全間距.

圖4 位置軌跡圖Fig.4 Position trajectory profile
圖5 是控制輸入F(t)圖.由圖5 可知,跟隨者車輛的控制輸入隨著領導者停止行駛而趨于零.由圖5(a)得出,無時延情況下,跟隨者車輛的控制輸入平滑,且沒有出現負的控制輸入.由圖5(c)~5(d)得出,通信時延對控制輸入有一定的影響,控制輸入在穩定前出現了波動,且出現了負的控制輸入.
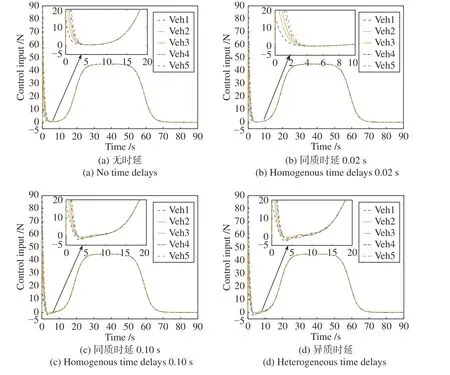
圖5 控制輸入 F(t)圖Fig.5 Control input F(t)profile
圖6 是位置跟蹤誤差圖.由圖6 得出,位置跟蹤誤差都能穩定地收斂到零,表明相鄰車輛之間的縱向間距都能穩定地收斂到5 m.本文提出的控制器能有效地保證隊列中的跟隨者車輛完成軌跡跟蹤并穩定地形成車輛隊列.圖6(a)以及圖6(c)~6(d)可知,在無時延、同質時延τ=0.10 s 和異質時延下,跟隨者車輛跟蹤領導者車輛并形成穩定的車輛隊列時間分別是t=10 s 、t=20 s 和t=26 s,表明通信時延對車輛軌跡跟蹤有一定的影響,異質時延的影響最大,在時延的影響下,出現了負的位置跟蹤誤差.由圖6(a)可知,負的位置跟蹤誤差被避免,因為本文設計控制器時考慮了車輛跟馳作用.

圖6 位置跟蹤誤差圖Fig.6 Position error profile
圖7 給出了隊列內所有車輛的速度圖.基于圖7,領導者車輛做勻速運動,最后隊列中跟隨者車輛的速度都能穩定收斂到和領導者速度一致.圖7(a)表明無時延下,跟隨者車輛在穩定地跟蹤領導者車輛之前,跟隨者車輛最大速度為7.4 m/s,且沒有負速度的出現.圖7(c)~7(d)表明在同質時延τ=0.10 s和異質通信時延下,跟隨者車輛也能跟蹤領導者車輛軌跡.但由于設置通信時延超過了通信時延的上界,有負速度的出現.

圖7 速度圖Fig.7 Velocity profile
圖8 表明速度誤差都能穩定收斂到0 m/s.基于圖8(a)以及圖8(c)~8(d),在無通信時延、同質時延τ=0.10 s 和異質時延下,速度誤差收斂到0 m/s的時間分別為t=10 s 、t=20 s 和t=26 s. 其中,在通信時延的影響下,速度誤差在收斂到零之前,出現了一定程度的波動.在同質時延τ=0.10 s 和異質時延下,速度誤差振幅最大值分別為0.2 m/s和0.3 m/s.
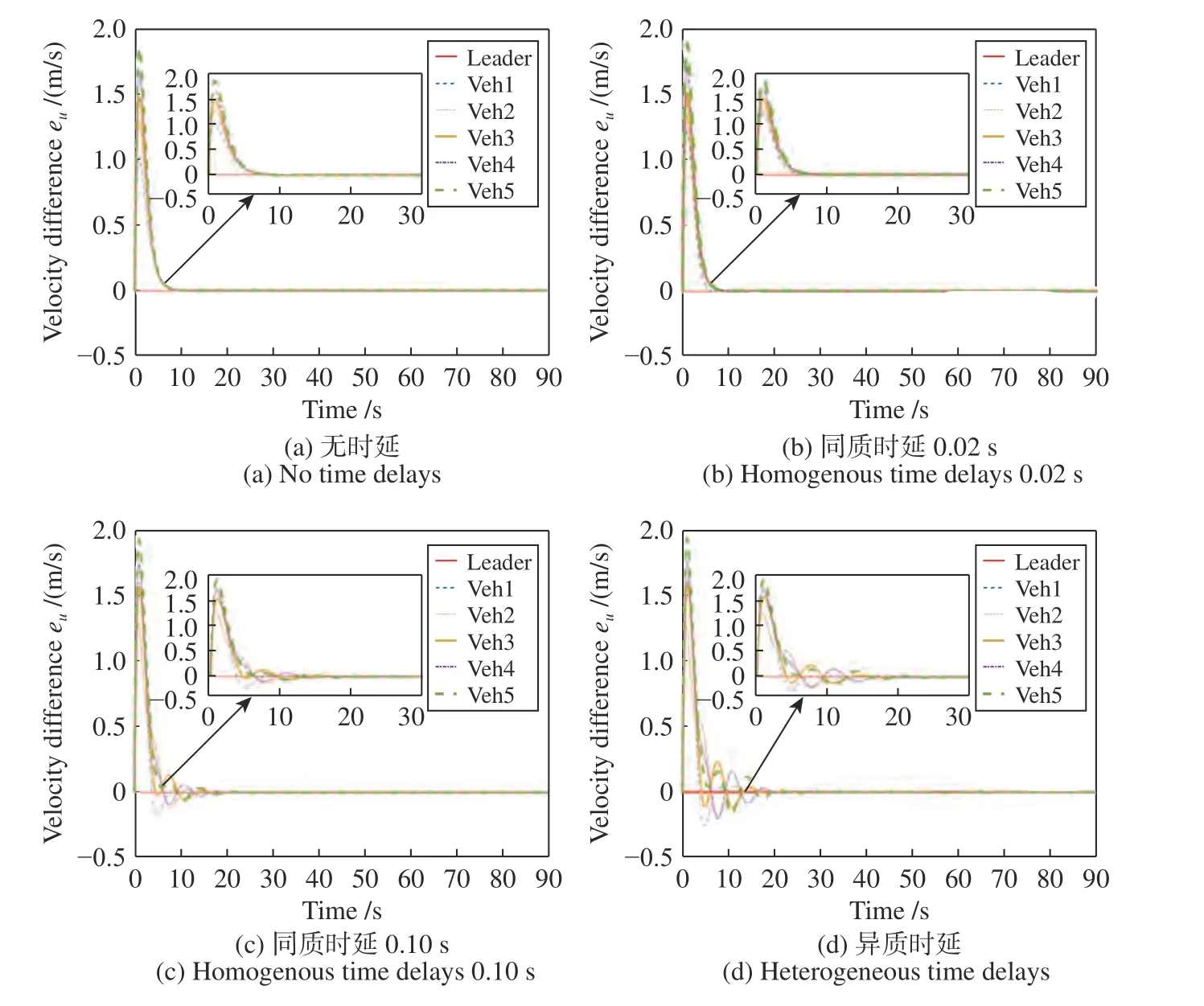
圖8 速度誤差圖Fig.8 Velocity difference profile
圖9 給出了所提控制器下的加速度圖.基于圖9(a)以及圖9(b)~9(d),在無時延、同質時延τ=0.02 s,0.10 s 和異質時延下,加速度振幅分別為2.2 m/s2、2.3 m/s2、2.6 m/s2和2.8 m/s2.時延對加速度有一定的影響,在異質時延下加速度的振幅比同質時延下加速度的振幅大.
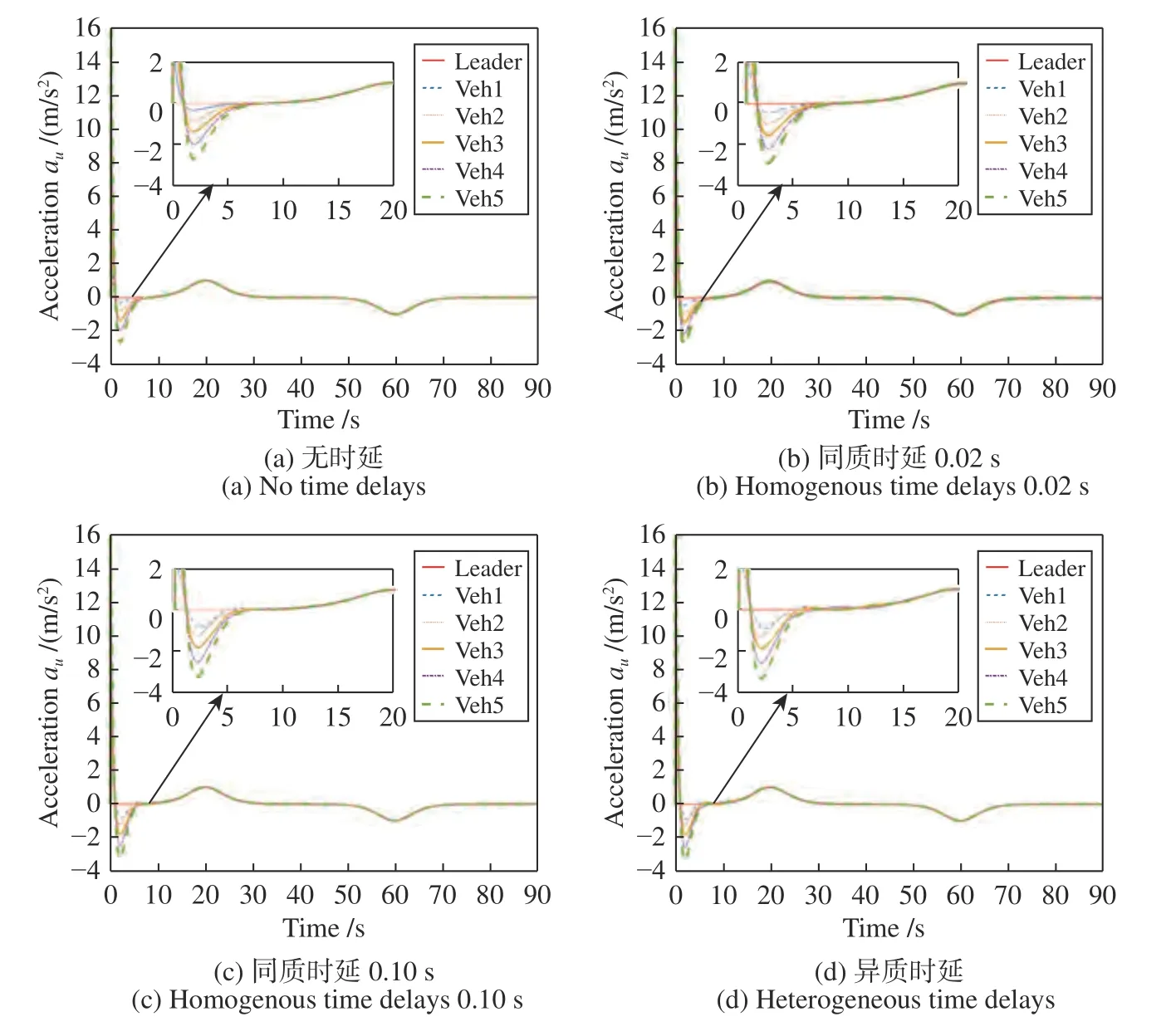
圖9 加速度圖Fig.9 Acceleration profile
本文設置兩組同質時延(即τ=0.02 s ,τ=0.10 s)數值仿真實驗,其目的是為探究通信時延對軌跡跟蹤性能的具體影響.針對本文所提車輛軌跡跟蹤控制器(5)和(6)設置的仿真場景以及所給控制器參數(ke=1.5 ,kφ=8),根據仿真結果圖4(a)~9(a)、圖4(b)~9(b)以及圖4(c)~9(c)可知,當τ ∈[0 s,0.02 s]時,負的控制輸入、負的位置跟蹤誤差以及負速度不會出現;當時,負的控制輸入、負的位置跟蹤誤差以及負速度會出現,但此時系統會趨于穩定.
綜上,圖4~9 給出的位置軌跡、控制輸入、位置跟蹤誤差、速度、速度誤差和加速度圖,表明了本文提出的控制器對智能網聯車輛的軌跡跟蹤控制有很好的控制效果,不僅能保證跟隨者車輛跟蹤領導者車輛軌跡,而且使車輛運動規律符合交通流理論,即避免了負的位置跟蹤誤差和負速度的出現.此外,數值實驗表明,時延對軌跡跟蹤效果有一定的影響,異質時延對軌跡跟蹤性能的影響比同質時延對軌跡跟蹤性能的影響顯著.通信時延對軌跡跟蹤性能的影響比較如表2所示.

表2 不同時延下的性能比較Table 2 Performance comparisons under different time delays
3.3 對比分析
對比位置跟蹤誤差圖,在文獻[20-21]中,有負的位置跟蹤誤差出現的現象,即意味著車輛間的間距小于安全間距,車輛追尾事故有可能發生.其中,在文獻[20]中,負的位置跟蹤誤差超過了6 m,這是嚴重不合理的.由圖6(a)可知,所提控制器可以避免負的位置跟蹤誤差,因為本文設計非線性控制器時考慮了車輛跟馳作用.
在文獻[14]中,有負速度出現的現象,即意味車輛在道路上出現倒車的現象,這在實際的交通中是不合理的.由圖7(a)可知,在軌跡跟蹤過程中,隊列中的車輛在所提控制器的作用下可以避免負的速度,因為本文設計非線性跟蹤控制器時考慮了車輛跟馳作用.
數值仿真實驗結果證明了本文所提控制器的有效性,不僅保證跟隨者車輛能夠跟蹤領導者車輛軌跡,而且避免了負的位置跟蹤誤差和負速度的出現.
4 結束語
本文考慮車輛跟馳作用和車車通信過程中存在的通信時延問題,基于車輛動力學模型,提出了一種分布式非線性軌跡跟蹤控制器解決來智能網聯車輛軌跡跟蹤控制問題.不僅保證位置跟蹤誤差收斂到原點,而且使車輛運動規律符合交通流理論,即無負的位置跟蹤誤差和負速度的出現.在車輛互聯環境中,提出一種雙向領導跟隨通信拓撲來表征車輛間的通信連接,隊列內的車輛通過雙向領導跟隨通信拓撲進行信息交互.通過考慮車輛跟馳作用、有界的通信時延、車輛間距差以及速度差提出一種分布式非線性軌跡跟蹤控制器.利用Lyapunov 方法證明了所提控制器的穩定性.最后,考慮速度干擾作用于領導者車輛,針對無時延、同質時延和異質時延三種場景進行數值仿真實驗,仿真結果驗證了所提控制器的有效性.