淺談基于激光測距的相機主鏡六自由度位姿測量方法
2021-11-14 05:40:28楊卓石恒汪利華杜俊峰邊疆楊偉
中國設備工程 2021年21期
楊卓,石恒,汪利華,杜俊峰,邊疆,楊偉
(1.中國科學院光電技術(shù)研究所,四川 成都 610209;2.中國科學院大學,北京 100049)
隨著現(xiàn)代科學技術(shù)的發(fā)展,空間相機的分辨率的提高同時也伴隨著口徑的增大。在空間中,光機結(jié)構(gòu)及光學元件的相對位置,尤其是主鏡與后鏡組之間的相對位置和姿態(tài)會因熱環(huán)境的變化和結(jié)構(gòu)撓性而發(fā)生變化,導致原本共線共相的結(jié)構(gòu)發(fā)生變化,從而嚴重影響相機的成像性能。所以需要對其進行六自由度位姿測量,以提供后續(xù)對鏡片位姿的調(diào)整。國內(nèi)外的研究機構(gòu)對六自由度測量也進行了相關的實驗研究。對于六自由度測量,僅采用單一技術(shù)不易實現(xiàn),通常結(jié)合兩種或者多種技術(shù)于一體,如基于激光干涉方法再結(jié)合衍射技術(shù)、自準直技術(shù)和圖像處理技術(shù)等。傳統(tǒng)的測量方法多采用多套測量設備以及傳感器進行實時多自由度測量,結(jié)構(gòu)較為復雜,難以滿足超大口徑透射式成像空間相機主鏡六自由度位姿測量的要求,并且解算過程也相對更加煩瑣,也會由于設備裝置過多而造成更多誤差量的引入。針對上述不足,本文提出一種基于激光測距的六自由度位姿實時測量系統(tǒng),用六路激光取代傳統(tǒng)的六條拉桿式直線位移傳感器,解決了現(xiàn)有六自由度測量技術(shù)中裝置結(jié)構(gòu)復雜、測量精度不高等問題,使得測量裝置的結(jié)構(gòu)簡單緊湊。采用激光測量的方法能獲得高精度距離信息,從而通過計算得到待測物體高精度的六自由度位置姿態(tài)信息。系統(tǒng)結(jié)構(gòu)簡單,測試調(diào)試方便,各自由度測量精度高。
1 測量原理
本方法根據(jù)六自由度并聯(lián)平臺結(jié)構(gòu)拓展而來,六自由度并聯(lián)平臺在進行控制與測量時,對其進行位姿正解以及位姿反解解算,可以根據(jù)預設動平臺位姿求出六根驅(qū)動桿桿長,也可以根據(jù)六根驅(qū)動桿的實際長度結(jié)合靜平臺上各鉸點坐標求出動平臺的實時位姿。
本方法使用6個高精度位移測量傳感器測量被測子鏡反射面上三個非共線點的位移信息,每個被測點采用一個角錐棱鏡,為對應的兩個傳感器提供反射光線。根據(jù)六個被測距離的變化,以及傳感器和角錐棱鏡的初始坐標,可以解算出被測子鏡的位姿信息。測量原理示意圖如圖1所示,圖中A1~A6為激光干涉位移測量探頭的位置,B1~B3為三個測量點角錐棱鏡的位置,以光學元件A的中心O點為原點建立靜坐標系(OXYZ),以光學元件B中心O′為中心建立動坐標系(O′X′Y′Z′)。動坐標系相對于靜坐標系的位置可以用廣義坐標Q來表示,記Q=(q1,q2,q3,q4,q5,q6)。其中q1,q2,q3三個元素為動坐標系相對靜坐標系三個姿態(tài)角α,,βγ,q4,q5,q6三個元素為動坐標系原點O投影到靜坐標系三軸上的位置坐標。
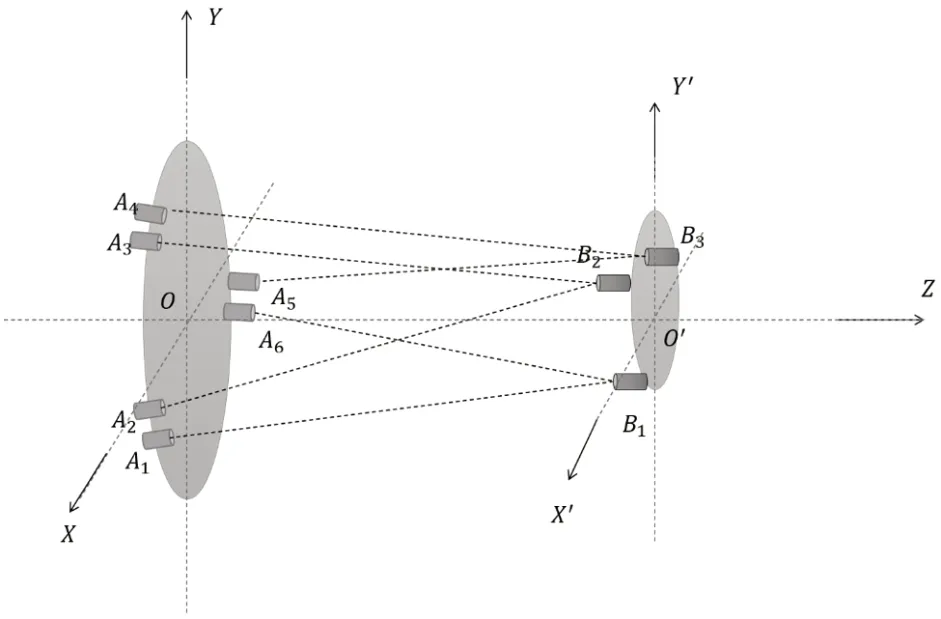
圖1 六自由度測量原理圖
在建立好坐標系后,兩個坐標系之間可以通過旋轉(zhuǎn)變換得到,通過以下三個旋轉(zhuǎn)變換矩陣,可以完成繞對應坐標軸的旋轉(zhuǎn)運動:
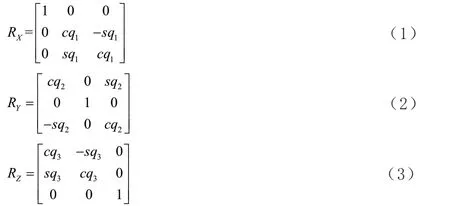
再將上述三個矩陣相乘,并加上平移變換后得到的齊次變換矩陣T為:

式中,s表示正弦函數(shù)sin,c表示余弦函數(shù)cos。
根據(jù)得到的轉(zhuǎn)換矩陣,用A表示光學元件A上各測量探頭在靜坐標系中的坐標向量矩陣,用B表示光學元件B各測量點動坐標系中的坐標向量矩陣。得到了這兩個坐標向量矩陣后,通過坐標變換,在同一坐標系下,便可以通過運算得出對應兩點之間的實時距離:

將上式代入,并且整理、抽象可表示為:

解該非線性方程組,得出的解即為所求位姿Q。首先,對此非線性方程組在附近進行泰勒級數(shù)展開,并取其線性部分,將非線性方程姐轉(zhuǎn)化成線性方程組。J為雅可比矩陣,也是方程的系數(shù)矩陣。原方程可以簡化為:

求解此線性方程的具體步驟如下:(1)輸入主鏡上各探頭坐標以及光學元件B上被測點坐標,選取光學元件B零位時的姿態(tài)作為迭代初始值。(2)通過給定初值及計算得到的各對應點間的距離,確定并得到雅可比矩陣。(3)利用公式(7)求解位置正解。(4)給定精度σ,判斷如果達到給定精度要求則輸出結(jié)果,否則,修正位姿,重復步驟(2)~(4)過程,直至滿足精度要求為止。
通過上述方法可求得光學元件B的六自由度位姿信息。
2 實驗研究
根據(jù)上述的測量原理搭建了相應的實驗平臺,為了控制光學元件B達到目標位姿,為六自由度測量結(jié)果提供標準,并檢驗測量結(jié)果精確度,將光學元件B固定在一臺六自由度并聯(lián)運動平臺上,并將平臺橫置,將光學元件B中心與光學元件A中心對準。實驗裝置的實物圖如圖2所示,一種基于激光測距儀的高精度六自由度測量裝置,包括高精度激光測距儀、3個外反射角錐鏡、靜坐標平板、動坐標平板;測量裝置中高精度激光干涉測距儀包括激光干涉測距儀主機、控制軟件、六個激光出射端和六條光纖;六個激光出射端分別通過六個可調(diào)節(jié)鏡架固定在靜坐標平板邊緣,并通過六條光纖與激光干涉測距儀主機連接;3個外反射角錐鏡固定在動坐標平板邊緣;通過分別調(diào)節(jié)六個可調(diào)節(jié)鏡架使從六個激光出射端發(fā)出的光束經(jīng)對應的外反射角錐鏡再返回到六個激光出射端,從而實現(xiàn)六個距離的測量。
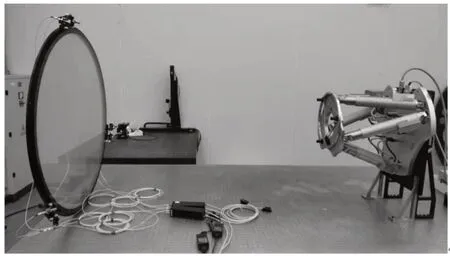
圖2 實驗裝置實物圖
實驗用激光測距儀是兩臺attocube公司的IDS3010,其分辨率為1pm,重復精度為2nm,該干涉儀具有三個測量通道,可實現(xiàn)三點同時測量。將兩臺測距儀使用交換機連接到電腦端,可同時測量六個通道。六自由度并聯(lián)平臺選擇使用PI公司的H-855K008型并聯(lián)平臺,該平臺采用自帶控制器,自帶控制器采用的是32位PID控制,并可連接至電腦端使用相應軟件進行控制。其X,Y方向上最小位移為1μm,Z方向為0.5μm,θX、θY方向上最小位移為7.5μrad,θZ方向為15μrad。X、Y方向上重復精度為±0.5μm,Z方向±0.2μm,θX、θY方向上重復精度為±0.3μrad,θZ方向為±7.5μrad。
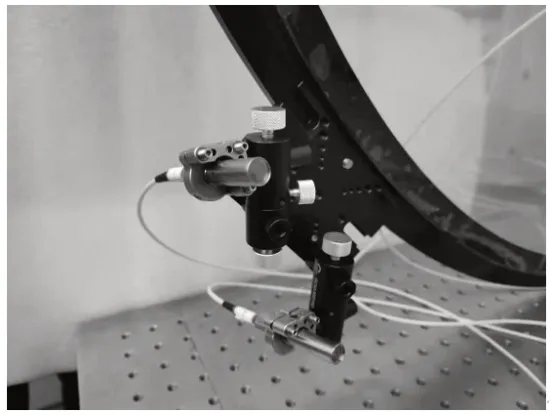
圖3 激光探頭固定方式
實驗過程中,將六自由度運動平臺上平臺的位姿作為六自由度測量的標準。在安裝好實驗裝置后,首先將六自由度平臺調(diào)整到初始位置,將六個激光探頭分別對準對應的測量點處的角錐棱鏡。記錄初始位置的六個距離數(shù)據(jù),并將數(shù)據(jù)輸入位姿正解程序內(nèi),得到初始位置數(shù)據(jù)。隨后便可開始相應實驗,并記錄測量數(shù)據(jù)。在此條件下,分別進行了單自由度、二自由度、四自由度以及六自由度測量實驗。在進行單自由度測量實驗時,選取了表1中幾組數(shù)據(jù)。
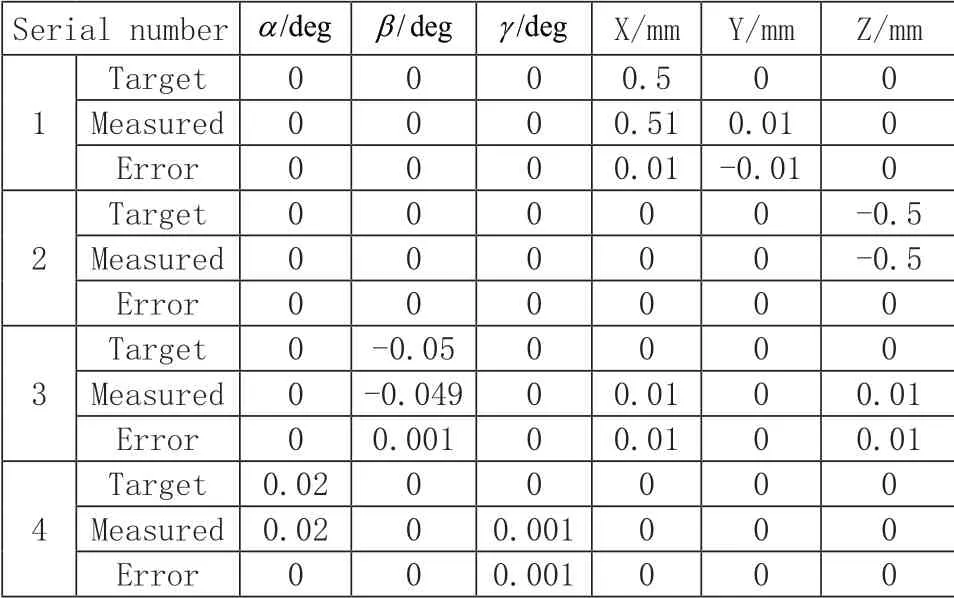
表1 單自由度運動測量得到的位姿數(shù)據(jù)
從以上結(jié)果中分析可得到,在進行單自由度平移運動時,本測量方法的最大誤差不超過0.01mm,在進行單自由度旋轉(zhuǎn)運動時,最大誤差不超過0.001°,達到項目要求。計算結(jié)果說明,測量裝置位姿正解程序以及測量方法的可靠性。在進行二自由度測量實驗時選取了以下幾組數(shù)據(jù)(見表2)。
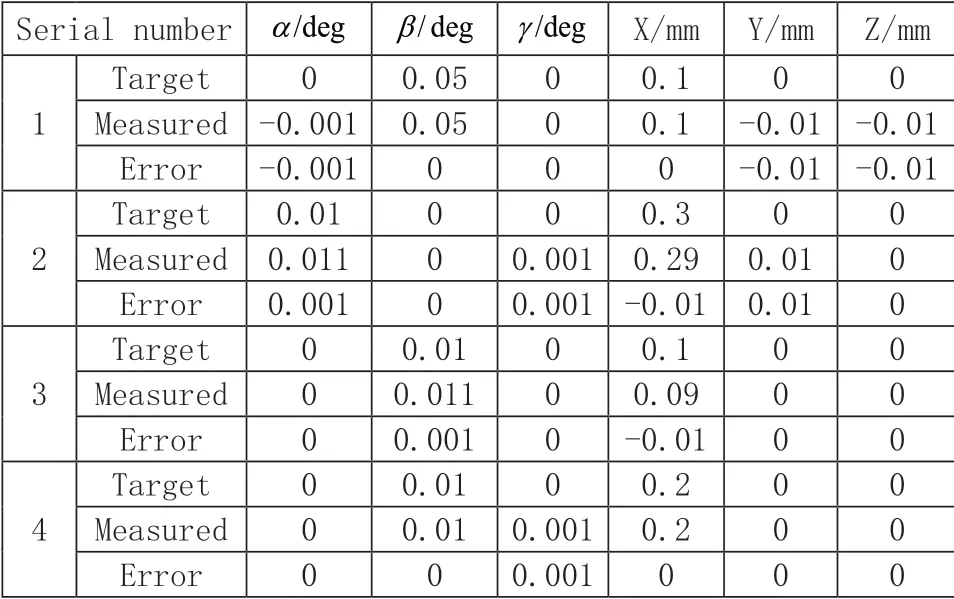
表2 二自由度運動測量得到的位姿數(shù)據(jù)
根據(jù)上述實驗數(shù)據(jù),可以分析出在進行平移和旋轉(zhuǎn)的復合二自由度運動時,在位移上的最大誤差不超過0.01mm,旋轉(zhuǎn)角度上最大誤差不超過0.001°。
在進行四自由度測量實驗時,選取了以下幾組數(shù)據(jù)(見表3)。

表3 四自由度運動測量得到的位姿數(shù)據(jù)
根據(jù)上述實驗數(shù)據(jù),可以分析出在進行平移和旋轉(zhuǎn)的復合四自由度運動時,在位移上的最大誤差不超過0.01mm,旋轉(zhuǎn)角度上最大誤差不超過0.001°。
在進行六自由度運動實驗時,做了兩組實驗,第一組繞X軸旋轉(zhuǎn)0.01°,繞Y軸旋轉(zhuǎn)0.02°,繞Z軸旋轉(zhuǎn)0.01°,向X方向移動-0.1mm,Y方向移動-0.3mm,Z方向移動0.2mm;第二組繞X軸旋轉(zhuǎn)0.01°,繞Y軸旋轉(zhuǎn)0.03°,繞Z軸旋轉(zhuǎn)-0.01°,向X方向移動0.2mm,Y方向移動-0.2mm,Z方向移動0.1mm(見表4)。
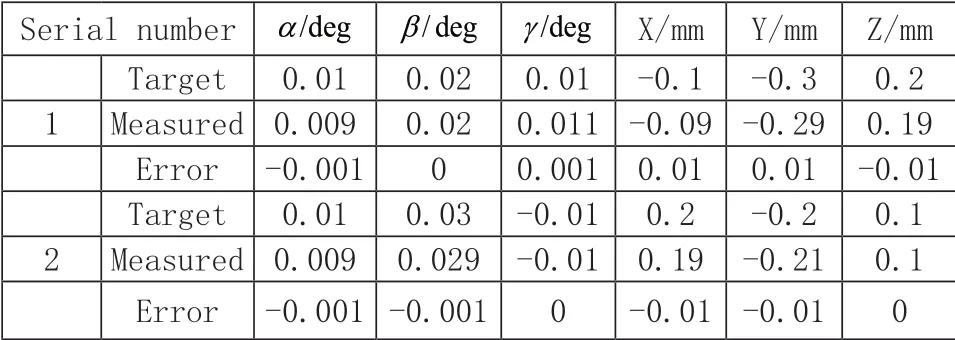
表4 六自由度運動測量得到的位姿數(shù)據(jù)
根據(jù)上述實驗數(shù)據(jù),可分析出在進行六自由度運動時,位移上最大誤差不超過0.01mm,旋轉(zhuǎn)角度上最大誤差不超過0.001°。在測量時,由于對激光探頭以及被測點處的角錐棱鏡的坐標沒有經(jīng)過標定,所以在進行實際位姿正解計算時會引入誤差,以及六自由度運動平臺在調(diào)整過程中驅(qū)動器以及電源產(chǎn)生的震動也會對測量結(jié)果產(chǎn)生影響。在經(jīng)過后續(xù)改進后,會提升現(xiàn)有的測量精度。
3 結(jié)語
本文提出了基于激光干涉測距的六自由度運動信息測量方法,建立了相應的實驗裝置,并進行了單自由度運動以及多自由度復合運動實驗。在經(jīng)過分析影響實驗精度的主要因素,認為測量激光探頭,角錐棱鏡的安裝坐標誤差以及在測量時的環(huán)境誤差為主要的誤差源。在實驗中測量范圍內(nèi),位移誤差能達到0.01mm,角度誤差能達到0.001°,即3.6″。在對激光出射端和角錐安裝坐標進行精密標定和減小環(huán)境影響誤差后,可以達到更高的位移及角度測量精度,有望提升1個數(shù)量級以上。本文方法具有結(jié)構(gòu)簡單、非接觸式、測量精度高等優(yōu)勢,為空間相機主鏡位姿測量奠定技術(shù)基礎。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
