無(wú)人帆船最大航速控制的風(fēng)帆攻角研究
2021-11-15 11:48:18黃朝明劉如磊章志浩林葉錦
計(jì)算機(jī)應(yīng)用與軟件 2021年11期
黃朝明 劉如磊 章志浩 林葉錦 王 菲
1(大連海事大學(xué)輪機(jī)工程學(xué)院 遼寧 大連 116026) 2(大連海事大學(xué)信息科學(xué)技術(shù)學(xué)院 遼寧 大連 116026)
0 引 言
無(wú)人帆船是一種以海洋清潔能源(風(fēng)能)為驅(qū)動(dòng)的多用途新型移動(dòng)觀測(cè)平臺(tái),可以勝任遠(yuǎn)海作業(yè),具有實(shí)時(shí)數(shù)據(jù)傳輸功能、低營(yíng)運(yùn)成本的優(yōu)勢(shì)[1]。無(wú)人帆船與傳統(tǒng)無(wú)人艇的主要區(qū)別在于其沒(méi)有內(nèi)在動(dòng)力系統(tǒng),僅靠風(fēng)對(duì)風(fēng)帆作用力作為航行的動(dòng)力。風(fēng)速和風(fēng)向的變化,不僅影響帆船的航向,還會(huì)影響帆船的航速。在一定風(fēng)速下,帆船穩(wěn)定航速會(huì)受風(fēng)向、風(fēng)帆攻角和帆船航向的共同影響。因此,在時(shí)變風(fēng)況下無(wú)人帆船穩(wěn)定航行中獲得最大航速是一項(xiàng)較為復(fù)雜的任務(wù)。為使無(wú)人帆船獲得最大航速,目前風(fēng)帆控制策略的研究主要有最大助推力法[2-4]、相對(duì)風(fēng)向角線性相關(guān)法[5]、橫傾角—最大航速函數(shù)分析法[6]等方法。王倩等[2]基于最大助推力系數(shù)下的風(fēng)帆攻角控制策略建立Fujin帆船運(yùn)動(dòng)模型;王國(guó)剛[3]和于升杰等[4]基于最大風(fēng)帆助推力對(duì)應(yīng)的操帆曲線對(duì)風(fēng)帆助航船舶進(jìn)行研究。Abril等[5]采用操帆經(jīng)驗(yàn)帆位角近似是相對(duì)風(fēng)向角的一半的規(guī)則搭建風(fēng)帆攻角模糊控制器。Stelzer等[6]研究最大航速與橫傾角度對(duì)應(yīng)的函數(shù)關(guān)系,控制帆船的橫傾角來(lái)編寫風(fēng)帆攻角控制規(guī)則。上述關(guān)于無(wú)人帆船風(fēng)帆控制策略的研究?jī)H關(guān)注風(fēng)帆助推力對(duì)航速的影響。風(fēng)帆為帆船提供助推力的同時(shí)也會(huì)產(chǎn)生側(cè)推力及偏航力矩[7],較大的側(cè)推力和偏航力矩不僅會(huì)增大帆船的漂角和舵角,而且使帆船航行阻力增加,進(jìn)而使帆船航速降低。并且,較大的側(cè)推力還會(huì)影響帆船的穩(wěn)定性,使帆船無(wú)法穩(wěn)定在期望航向,甚至傾覆。
本文綜合考慮風(fēng)帆側(cè)推力和助推力對(duì)帆船航速的影響,在靜水、理想風(fēng)況條件下,對(duì)無(wú)人帆船最大航速的風(fēng)帆攻角策略進(jìn)行了研究。
1 研究方案
為了獲取目標(biāo)帆船最大航速下風(fēng)帆攻角策略,本文采用基于帆船運(yùn)動(dòng)模型的變參數(shù)(相對(duì)風(fēng)向角、風(fēng)帆攻角)分析比較法進(jìn)行研究,技術(shù)路線如圖1所示。
首先,基于MMG方法搭建帆船運(yùn)動(dòng)數(shù)學(xué)模型,包括裸船受力、船舵受力和風(fēng)帆受力模型,其中,風(fēng)帆的助推力和側(cè)推力計(jì)算與分析是關(guān)鍵;其次,基于帆船運(yùn)動(dòng)數(shù)學(xué)模型搭建Simulink仿真模型,進(jìn)行仿真計(jì)算,獲得變相對(duì)風(fēng)向角工況下帆船航速隨攻角變化的規(guī)律;最后,綜合考慮航速、舵機(jī)負(fù)荷和轉(zhuǎn)帆電機(jī)負(fù)荷等因素的影響,分析和歸納無(wú)人帆船最大航速控制的風(fēng)帆攻角策略。
2 帆船運(yùn)動(dòng)數(shù)學(xué)模型
2.1 目標(biāo)帆船參數(shù)與運(yùn)動(dòng)坐標(biāo)系定義
本文以雙體帆船為目標(biāo)船,如圖2所示,其主要參數(shù)如表1所示。

圖2 目標(biāo)帆船三維模型

表1 目標(biāo)帆船參數(shù)表
為簡(jiǎn)化分析帆船航速與風(fēng)帆攻角的關(guān)系,在滿足要求的前提下,本文僅考慮前進(jìn)、橫移和首搖三個(gè)自由度[7]。
定義隨船坐標(biāo)系oxy平面和全局坐標(biāo)系o0x0y0,船舶前進(jìn)速度為u,橫移速度為v,首搖角速度為r,如圖3所示。前進(jìn)速度與橫移速度的合速度為帆船航速Vs,船首方向與帆船航速的夾角β為船舶漂角,船首方向與全局坐標(biāo)系o0x0的夾角ψ為船舶首向角,船舶舵角為δ,絕對(duì)風(fēng)速為Vt,船舶相對(duì)風(fēng)速為Va,船舶相對(duì)風(fēng)向角為θ。

圖3 帆船運(yùn)動(dòng)坐標(biāo)系
2.2 三自由度帆船運(yùn)動(dòng)數(shù)學(xué)模型
基于響應(yīng)型船舶操縱分離(MMG)方法建立三自由度運(yùn)動(dòng)模型[8]:
(1)
式中:m為船舶總重量;Izz為隨船坐標(biāo)系下帆船對(duì)z軸的轉(zhuǎn)動(dòng)慣量;Jzz為隨船坐標(biāo)系下帆船對(duì)z軸的附加轉(zhuǎn)動(dòng)慣量;mX和mY分別為隨船坐標(biāo)系下在前進(jìn)方向和橫移方向上的附加質(zhì)量;XH、YH、NH為裸船阻力和阻力矩;XR、YR、NR為船舵作用力和力矩;XS、YS、NS為風(fēng)帆助推力、風(fēng)帆側(cè)推力和風(fēng)帆轉(zhuǎn)首力矩。
3 風(fēng)對(duì)風(fēng)帆作用力計(jì)算
3.1 風(fēng)帆空氣動(dòng)力特性
帆船動(dòng)力是基于風(fēng)帆的空氣動(dòng)力特性理論[9],即空氣流經(jīng)翼型弧面時(shí),會(huì)產(chǎn)生沿氣流方向的阻力和垂直于來(lái)流方向的升力,通常采用無(wú)量綱升力系數(shù)和阻力系數(shù)表示,對(duì)應(yīng)關(guān)系為:
(2)
式中:ρa(bǔ)為空氣密度;SW為風(fēng)帆的側(cè)向投影面積;FL和FD為風(fēng)帆升力和阻力;CL和CD為風(fēng)帆升力系數(shù)和阻力系數(shù)。
低速空氣流體視為不可壓縮流體,根據(jù)風(fēng)帆空氣動(dòng)力特性理論,CL和CD僅與風(fēng)帆攻角α有關(guān),且存在一一對(duì)應(yīng)關(guān)系。
采用CFD技術(shù)對(duì)穩(wěn)態(tài)下的目標(biāo)風(fēng)帆空氣動(dòng)力性能進(jìn)行數(shù)值模擬。采用文獻(xiàn)[10]計(jì)算域和邊界條件對(duì)風(fēng)帆進(jìn)行數(shù)值模擬計(jì)算風(fēng)帆升力系數(shù)和阻力系數(shù)。目標(biāo)風(fēng)帆的基本尺寸如下:展弦比為2.70,拱度比為10.5%,風(fēng)帆弦長(zhǎng)為50 cm。假設(shè)風(fēng)帆與水平面垂直,且為剛體翼帆,受到空氣動(dòng)力不發(fā)生彈性形變。
攻角變化范圍為0°~90°,每隔3°計(jì)算一個(gè)工況。通過(guò)數(shù)值模擬計(jì)算出風(fēng)帆升力系數(shù)、阻力系數(shù),如圖4所示。

圖4 風(fēng)帆作用力系數(shù)隨攻角變化曲線
3.2 風(fēng)帆助推力與側(cè)推力計(jì)算及分析
對(duì)風(fēng)帆升力和阻力進(jìn)行合成分解,得到沿帆船首向的助推力和垂直于帆船首向的側(cè)推力,通常采用無(wú)量綱助推力系數(shù)和側(cè)推力系數(shù)表示,對(duì)應(yīng)關(guān)系為:
(3)
式中:CX和CY為風(fēng)帆助推力系數(shù)和側(cè)推力系數(shù)。
由于目標(biāo)風(fēng)帆為對(duì)稱翼型,因此本文僅研究相對(duì)風(fēng)向角范圍為0°~180°,結(jié)合式(3)和圖4可計(jì)算得到不同相對(duì)風(fēng)向角、不同風(fēng)帆攻角對(duì)應(yīng)的風(fēng)帆助推力系數(shù)和側(cè)推力系數(shù),取5°相對(duì)風(fēng)向角間隔,擬合曲線面如圖5所示。
可以看出,不同相對(duì)風(fēng)向角下,風(fēng)帆助推力系數(shù)與側(cè)推力系數(shù)隨攻角增大而先增大后減小,但駐點(diǎn)和變化速率有差異,對(duì)帆船以最大航速航行風(fēng)帆攻角策略有較大影響。在相對(duì)風(fēng)向角55°時(shí)尤為明顯,由圖5中風(fēng)帆作用力變化曲面數(shù)據(jù)可以獲得相對(duì)風(fēng)向角55°時(shí)風(fēng)帆助推力系數(shù)和風(fēng)帆側(cè)推力系數(shù)隨攻角變化曲線如圖6所示。

圖6 相對(duì)風(fēng)向角55°時(shí),CX和CY隨攻角變化曲線
可以看出,風(fēng)帆助推力系數(shù)和側(cè)推力系數(shù)攻角在0°~15°范圍內(nèi)同步增長(zhǎng),風(fēng)帆助推力系數(shù)攻角在15°~39°范圍內(nèi)變化不明顯,在30°時(shí)達(dá)到最大值,在此攻角范圍內(nèi)的風(fēng)帆側(cè)推力系數(shù)增長(zhǎng)速率較大。
根據(jù)圖5可得不同相對(duì)風(fēng)向角下所取得的最大風(fēng)帆助推力系數(shù)及對(duì)應(yīng)的側(cè)推力系數(shù),擬合曲線如圖7所示。可以看出,當(dāng)相對(duì)風(fēng)向角小于25°時(shí)最大助推力系數(shù)趨近或小于零。因此,本文設(shè)定目標(biāo)帆船可航行區(qū)的相對(duì)風(fēng)向角為25°~180°。

圖7 最大風(fēng)帆助推力系數(shù)與對(duì)應(yīng)側(cè)推力系數(shù)關(guān)系曲線
4 風(fēng)帆攻角策略分析
4.1 帆船運(yùn)動(dòng)仿真模型
基于上述帆船運(yùn)動(dòng)數(shù)學(xué)模型和數(shù)值模擬結(jié)果,結(jié)合目標(biāo)船參數(shù),采用MATLAB/Simulink軟件建立目標(biāo)帆船運(yùn)動(dòng)仿真模型,如圖8所示。輸入為相對(duì)風(fēng)向角、絕對(duì)風(fēng)速和期望航向,輸出為帆船處于平衡狀態(tài)下的帆船航速、風(fēng)帆作用力、船舶漂角和船舶舵角。系統(tǒng)中其他參數(shù)設(shè)置如下:真實(shí)風(fēng)速為12 m/s,期望航向?yàn)?°,系統(tǒng)穩(wěn)定后當(dāng)前航向角與期望航向角之差小于1°視為到達(dá)期望航向。本文利用變參數(shù)PID自動(dòng)舵系統(tǒng)使帆船保持到期望航向。

圖8 帆船運(yùn)動(dòng)仿真模型
為獲得綜合考慮風(fēng)帆側(cè)推力和助推力下,不同相對(duì)風(fēng)向角對(duì)應(yīng)的風(fēng)帆攻角策略,將相對(duì)風(fēng)向角和絕對(duì)風(fēng)速作為系統(tǒng)的輸入,經(jīng)過(guò)帆船運(yùn)動(dòng)模型計(jì)算得到相對(duì)風(fēng)速,通過(guò)風(fēng)帆模型計(jì)算風(fēng)帆合作用力,再輸入給帆船運(yùn)動(dòng)模型,以系統(tǒng)輸出航速作為研究風(fēng)帆攻角策略依據(jù)。
4.2 仿真及結(jié)果分析
按所設(shè)定的參數(shù)進(jìn)行仿真計(jì)算,相對(duì)風(fēng)向角在25°~180°范圍內(nèi),取5°為相對(duì)風(fēng)向角間隔,風(fēng)帆攻角在3°~90°范圍內(nèi),取3°風(fēng)帆攻角間隔,獲得變相對(duì)風(fēng)向角工況下帆船實(shí)際航速隨攻角的變化曲線簇。根據(jù)前面的分析結(jié)果,按相對(duì)風(fēng)向角的大小分成55°工況和其他角度工況兩部分進(jìn)行分析。
當(dāng)相對(duì)風(fēng)向角取55°時(shí),將3°~39°范圍內(nèi)的風(fēng)帆攻角輸入帆船運(yùn)動(dòng)模型,計(jì)算對(duì)應(yīng)的帆船航速、風(fēng)帆作用力、舵角和漂角,得出帆船航速和帆船參數(shù)隨攻角變化曲線如圖9和圖10所示。

圖9 相對(duì)風(fēng)向角55°時(shí),航速隨攻角變化曲線

(a) 風(fēng)帆作用力變化曲線

(b) 漂角、舵角變化曲線圖10 相對(duì)風(fēng)向角55°時(shí),帆船參數(shù)隨攻角變化曲線
由圖9可知,在相對(duì)風(fēng)向角為55°時(shí),隨著攻角增大,帆船的航速先上升后下降。當(dāng)攻角從3°上升到15°時(shí),航速?gòu)?.61節(jié)上升到3.71節(jié),上升速率較快;在攻角為15°和18°時(shí),航速相差不大;攻角從18°上升到33°時(shí),航速變化呈小幅下降趨勢(shì)。此外,當(dāng)攻角處于36°~39°范圍內(nèi),由于風(fēng)帆側(cè)向力相對(duì)助推力較大,即使?jié)M舵船首仍無(wú)法穩(wěn)定到期望航向,無(wú)有效速度輸出,因此舍棄此攻角范圍。
由圖10可知,在3°~30°攻角范圍內(nèi),風(fēng)帆助推力隨著攻角增大而增大,從33°攻角開(kāi)始,助推力隨攻角增大而下降。在3°~33°攻角范圍內(nèi),風(fēng)帆側(cè)推力隨著攻角增大而增大。在3°~15°攻角范圍內(nèi),風(fēng)帆助推力和側(cè)推力的增速相差不大,在15°~30°攻角范圍內(nèi),風(fēng)帆助推力增速驟降,風(fēng)帆側(cè)推力仍基本保持原增速上升。超過(guò)30°攻角時(shí),風(fēng)帆助推力開(kāi)始下降,風(fēng)帆側(cè)推力增速也開(kāi)始下降。可見(jiàn),在3°~33°攻角范圍內(nèi),漂角隨著攻角的增大而增大,舵角(±代表方向)隨著攻角的增大而增大。
以航速最大為評(píng)價(jià)指標(biāo),選擇15°或者18°攻角。攻角為18°時(shí),舵角為14°,漂角為4°,風(fēng)帆助推力為78 N,風(fēng)帆側(cè)推力為82 N;攻角為15°時(shí),舵角為11°,漂角為3°,風(fēng)帆助推力為77 N,風(fēng)帆側(cè)推力為69 N。綜合考慮應(yīng)用中舵機(jī)和轉(zhuǎn)帆電機(jī)的負(fù)荷因素,選擇最佳攻角為15°。
將其他相對(duì)風(fēng)向角分為25°~50°、60°~70°、75°~90°、95°~115°、120°~125°、130°~145°、150°~165°和170°~180°八組,按照相對(duì)風(fēng)向角55°的分析方法,研究在不同相對(duì)風(fēng)向角下,帆船航速隨攻角的變化,仿真計(jì)算結(jié)果如圖11所示,未輸出值為無(wú)效速度值。

(a) 相對(duì)風(fēng)向角25°~50°航速變化曲線

(b) 相對(duì)風(fēng)向角60°~70°航速變化曲線

(c) 相對(duì)風(fēng)向角75°~90°航速變化曲線

(d) 相對(duì)風(fēng)向角95°~115°航速變化曲線

(e) 相對(duì)風(fēng)向角120°~125°航速變化曲線
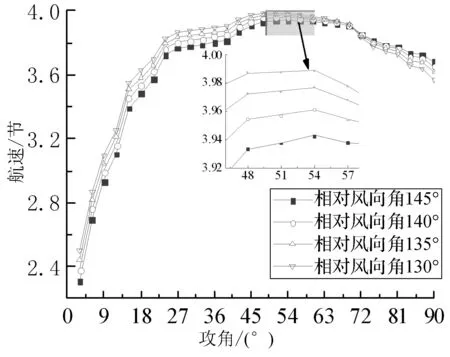
(f) 相對(duì)風(fēng)向角130°~145°航速變化曲線

(g) 相對(duì)風(fēng)向角150°~165°航速變化曲線

(h) 相對(duì)風(fēng)向角170°~180°航速變化曲線圖11 不同相對(duì)風(fēng)向角下,航速隨攻角的變化曲線
可以看出,不同相對(duì)風(fēng)向角下,有效攻角范圍不同。相對(duì)風(fēng)向角在25°~105°范圍內(nèi),在大攻角時(shí),實(shí)際航向無(wú)法穩(wěn)定到期望航向,相對(duì)風(fēng)向角在25°時(shí),風(fēng)帆最大助推力對(duì)應(yīng)攻角,帆船實(shí)際航向無(wú)法穩(wěn)定到期望航向。相對(duì)風(fēng)向角在175°~180°范圍內(nèi),由于風(fēng)帆助推力相對(duì)側(cè)推力較小,在小攻角范圍內(nèi),帆船實(shí)際航向無(wú)法穩(wěn)定到期望航向。綜上,在可航行區(qū)相對(duì)風(fēng)向角25°~180°范圍內(nèi),帆船最大航速下風(fēng)帆攻角策略如表2所示,在相鄰組別采用插值擬合。

表2 最大航速下風(fēng)帆最佳攻角控制表
在可航行區(qū)相對(duì)風(fēng)向角25°~180°范圍內(nèi),不同相對(duì)風(fēng)向角對(duì)應(yīng)的最大航速如圖12所示。相對(duì)風(fēng)向角在25°~110°范圍內(nèi),帆船的最大航速隨著相對(duì)風(fēng)向角增大而增大。相對(duì)風(fēng)向角在110°時(shí),航速達(dá)到最大(4.02節(jié))。相對(duì)風(fēng)向角在110°~180°范圍內(nèi),帆船的最大航速隨相對(duì)風(fēng)向角增大而降低。

圖12 不同相對(duì)風(fēng)向?qū)?yīng)最大航速曲線
5 結(jié) 語(yǔ)
在無(wú)人帆船航行中,針對(duì)定航向最大航速航行的研究,本文提出了一種綜合考慮風(fēng)帆助推力和側(cè)推力風(fēng)帆最佳攻角策略的分析方法,并獲得目標(biāo)帆船的最大航速下風(fēng)帆攻角策略。本文所做的研究工作及相應(yīng)結(jié)論可為無(wú)人帆船智能航行風(fēng)帆攻角控制器的設(shè)計(jì)提供理論參考。結(jié)合目標(biāo)帆船運(yùn)動(dòng)仿真模型,對(duì)相同相對(duì)風(fēng)向角下能為目標(biāo)帆船提供最大航速的風(fēng)帆攻角進(jìn)行分析和歸納,得出結(jié)論如下:
(1) 相對(duì)風(fēng)向角在0°~80°范圍內(nèi),在攻角較大時(shí),由于風(fēng)帆側(cè)推力相對(duì)助推力較大,導(dǎo)致帆船實(shí)際航向無(wú)法穩(wěn)定到期望航向。
(2) 最大風(fēng)帆助推力法與最大航速下對(duì)應(yīng)的風(fēng)帆攻角策略不同,且當(dāng)相對(duì)風(fēng)向角為25°時(shí),按照最大風(fēng)帆助推力法風(fēng)帆攻角策略,帆船無(wú)法在期望航向上穩(wěn)定航行。本文制定了風(fēng)帆助推力和側(cè)推力共同影響的帆船最大航速控制的風(fēng)帆攻角策略。
