基于FCM-ARIMA的多階段退化設備壽命預測研究
2021-11-17 06:35:36李瀟瀛李昌均
計算機仿真 2021年8期
李瀟瀛,方 鴿,李昌均
(1.西安工業大學新生院,陜西 西安710038;2.93140部隊,廣東 廣州 510052;3.空軍工程大學研究生院,陜西 西安 710038)
1 引言
隨著設備的復雜性和其自身價值的提高,在設備運行過程中對其進行信號的監測,進而評估設備健康狀態并對設備壽命進行預測成為一種通用做法。設備壽命預測是進行維修決策,降低設備使用壽命周期費用的基本前提,也是預測與健康管理(Prognostics and Health Management,PHM)最為關鍵的部分[1,2]。對設備進行壽命預測的方法可以主要分為基于物理失效模型的方法和基于機器學習的壽命預測方法,基于物理失效模型的方法通過分析設備工作機理得出其退化函數,進一步通過估計設備當前狀態得出壽命預測;基于機器學習的壽命預測方法主要利用設備退化數據,由算法學習設備退化規律,從而對設備的壽命進行在線或離線的預測[3],由于其對監測數據自動處理的優勢得到了越來越多的應用。
近期發表的一些研究表明,相當一部分設備和部件的退化呈現出明顯的多階段特性[4],此外,對于間歇性工作的設備來說,即使其退化過程為線性過程,由于其壽命過程為休眠狀態與工作狀態交替,其退化過程也呈現出多階段退化的特點[5]。為了實現對多階段退化設備進行準確的壽命預測,在文獻[6]中,作者使用聚類的方法對系統的不同退化階段進行估計,得到拐點之后,針對不同退化階段特點采取對應的維修策略。文獻[7]利用同類設備退化特性對設備退化拐點進行估計,進而用支持向量回歸機對設備壽命進行預測,文獻[8]利用純機器學習的方法對設備退化信號進行特征選擇,確定特征與標簽的關聯度后對設備退化進行分析。此外,文獻[9]在考慮多階段的基礎上,同時對隨機跳躍的退化現象進行了分析建模。
現階段,機器學習的方法主要將其重點放在了模型的構建以及對參數的優化[10],其實質是在未充分設備退化基本機理的情況下,通過設備退化過程中收集到的數據,對于多階段的很難僅僅通過機器學習的方法進行學習。針對多階段退化設備特點,本文提出一種模糊C均值-差分整合移動平均自回歸(Fuzzy C-Means Clustering-AutoRegressiveIntegratedMovingAverageFCM-ARIMA)的算法,將系統的多階段退化作為先驗知識,將設備的退化過程進行劃分,首先通過FCM確定設備退化過程中的拐點,確定設備所處的退化狀態,針對不同的設備退化階段,分別用ARIMA方法進行狀態估計與壽命預測,從而避免直接在無先驗知識的情況下直接使用機器學習的方式對多階段退化設備進行壽命預測,最后通過一個多階段退化設備實例對本文提出方法的有效性進行了驗證。
2 多階段退化設備壽命預測
2.1 多階段退化設備描述
多階段退化設備的退化過程呈現比較明顯的階段性[11,12],在本文中,將退化過程分為正常退化狀態、輕度退化狀態、中度退化狀態和接近失效退化狀態。如果狀態評估不及時或不準確,當設備退化到一定階段后,任何工作時間都可能發生系統功能失效,對多階段退化設備進行準確的壽命預測,是對設備實現預防性維修,避免因失效帶來事故的必要前提。
一個典型的多階段退化系統如圖1所示,在設備到達一定的退化量門限值后即認為設備失效。從圖中可以看出,設備在整個工作壽命周期內呈現出比較明顯的多階段退化特性,這種特性可能是由于設備本身物理機理導致,也有可能是在使用過程中環境變化或使用強度的變化所導致的。
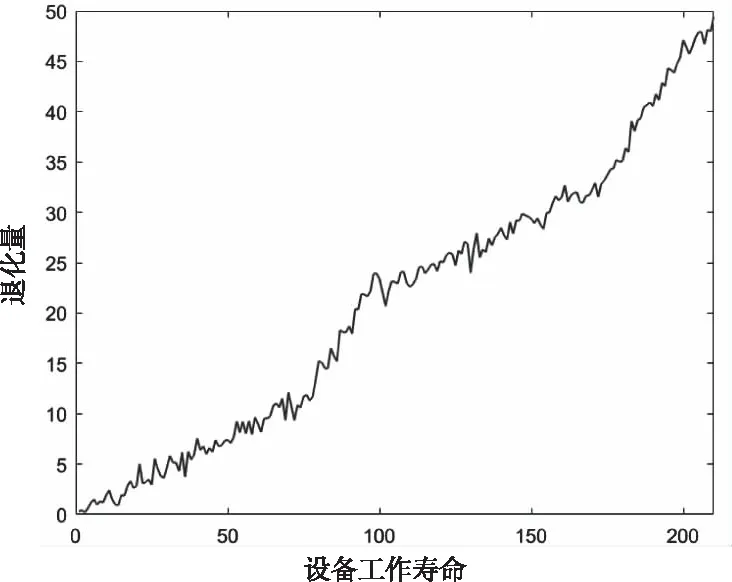
圖1 多階段退化設備退化量隨工作壽命變化曲線
2.2 設備退化拐點分析
由于多階段退化設備分段的特性,使用單一的壽命函數對退化過程描述具有局限性,無法同時表征不同階段退化的特點,在本文中將采用分段描述的方式來進行設備壽命預測。而建立設備的分段描述函數,首先需要通過數學方法對設備分段拐點進行估計,進而將監測數據分配到與其退化特性相匹配的階段。
由以上分析可知對于多階段退化的設備,先驗知識只有設備退化所呈現的階段數量,基于退化量的量化來分配退化階段是比較簡單的一種方法,但這種方法忽視了設備之間本身的差異性。因此,對于設備退化拐點的估計應使用無監督的學習方法,通過個體設備退化特性,評估每一個監測數據對于不同類群的隸屬度,并設定相應的目標函數,使得類間的距離盡量大,而類內的差異盡量小,即可得出設備退化監測數據的拐點,進而將退化過程劃分為幾個階段。
2.3 設備壽命預測
由于對設備退化物理模型的精確刻畫存在一定的困難,目前在有一定監測數據的條件下主要采用基于數據驅動的方法對設備剩余壽命進行預測,而此類方法包括統計模型、設備可靠性函數和人工智能等方法。如前文所述,隨著人工智能和機器學習算法的發展,此類方法在處理設備剩余壽命預測和回歸問題得到了越來越廣泛的應用,但在沒有先驗知識的情況下,直接對多階段退化的設備監測數據進行回歸分析結果往往并不理想。本文將在使用機器學習算法進行回歸之前,通過拐點估計得出多階段退化設備的分段,進一步的,再對分段后的檢測數據利用人工智能的方法進行處理和分析。
3 FCM-ARIMA算法拐點估計與壽命預測
3.1 FCM算法拐點估計
在本小節中,將介紹通過使用FCM實現監測數據聚類的過程。傳統的聚類方法(如C-均值聚類)中,每個監測數據被分配到一個聚類中心。然而,對于散落在聚類邊界上的數據,由于其對聚類中心的隸屬度存在一定的模糊性,將其分配到一個聚類中心是不合理的。此外,在傳統的聚類方法中,數據只屬于一個聚類,具有100%的確定性。但這種假設在實際應用中并不合理。因此,本文采用FCM方法,引入模糊隸屬度來更好地表示不確定性。
在實際應用中,僅靠主觀信息不能直接獲得設備退化的實時狀態,首先設定4個退化狀態的中心是V={v1,v2,…,vc},vi?Rp,監測到的設備退化數據為X={x1,x2,…,xn},xj?Rp,其中xj表示監測到的第j個無標簽數據。因此,為了評估設備退化過程并選擇不同狀態之間的拐點,必須將無標簽的數據標記為不同的退化狀態。vi表示第i個退化狀態的聚類中心,設U為n個監測數據對c個退化狀態聚類中心的隸屬度矩陣
(1)
采用歐氏距離度量第j個監測數據到第i個聚類中心的相似度。距離定義為
(2)

通過聚類,可以得到每個監測數據對不同聚類中心的聚類的結果。為了評價被監測數據所處的退化狀態,本文以監測數據到聚類的模糊隸屬度加權距離最小為目標。因此,目標函數可以表示為
(3)
將拉格朗日函數對V求梯度歸零可得
(4)
將拉格朗日函數對U求梯度歸零可得
(5)
(6)
對于大多數設備或部件來說,拐點的估計并不能通過直觀的方式得到。因此,對于這類時間序列,可以通過隸屬度矩陣求出其拐點。在本文中,考慮到處理對象的是連續監測的退化數據而不是隨機分散的數據,假設每個被監測的數據只能被分配到兩個相鄰的狀態。因此,將絕對隸屬度差值小于0.1的兩個相鄰退化態的數據作為兩個相鄰退化態的拐點,即
uij-ui(j+1)≤εm(?i=1,…c,j=1,…n)
(7)
3.2 ARIMA算法
ARIMA算法是時間序列預測分析方法之一。它的基本思想是將預測對象隨時間推移而形成的數據序列視為一個隨機序列,用一定的數學模型來近似描述這個序列。對于以時間為基準的監測數據可以較好的進行預測。
自回歸模型是利用當前值和歷史值之間的關系,用變量自身的歷史數據對自身進行預測。p階自回歸過程表示第n個數據與第n-i的關系,γi為自相關系數,為要求解的參數。p階自回歸過程的公式定義為
(8)
移動平均過程可以作為自回歸過程的補充,解決自回歸方差中白噪聲的求解問題,它具有滯后性,其模型形式為
(9)
自回歸移動平均模型由兩部分組成:自回歸部分和移動平均部分,因此包含兩個階數,可以表示為ARMA(p,q),p是自回歸階數,q為移動平均階數,回歸方程表示為

(10)
ARIMA模型能夠用于齊次非平穩時間序列的分析,這里的齊次指的是原本不平穩的時間序列經過d次差分后成為平穩時間序列。
本文所提出的FCM-ARIMA算法針對多階段退化設備特性,首先由FCM對監測退化數據進行拐點估計,之后通過拐點將退化過程分為幾個不同階段,之后由ARIMA算法分別對各階段的監測數據進行回歸分行,進而對設備壽命進行預測。
4 多階段退化設備壽命預測驗證
本節將對圖1中的多階段設備退化數據進行實驗驗證,首先通過FCM算法,分析數據退化不同階段拐點,利用RF算法對退化各階段數據進行分析與壽命預測。
4.1 退化設備監測數據拐點估計
聚類迭代過程目標函數度量隨迭代次數變化如圖2所示,可以看出,在聚類中心進行大約15次迭代后,目標函數度量下降到0附近,表明此后聚類中心不再后大的調整。
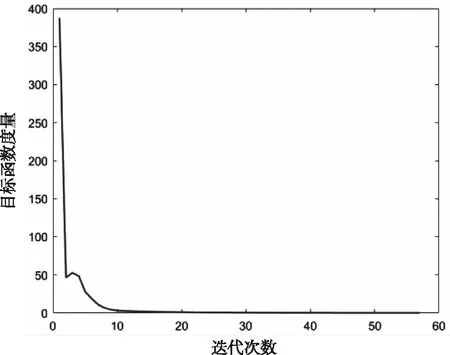
圖2 聚類迭代過程目標函數度量
對退化監測數據的聚類結果如圖3所示,以可比較直觀的看出,通過聚類過程,設備的退化過程被4個聚類中心分成了4個階段,不同階段之間的退化速率有較大區別,如第二階段和第三階段相比,后者退化速率明顯要高于前者,將此過程進行分階段處理結于后續分階段進行壽命預測比較合理。
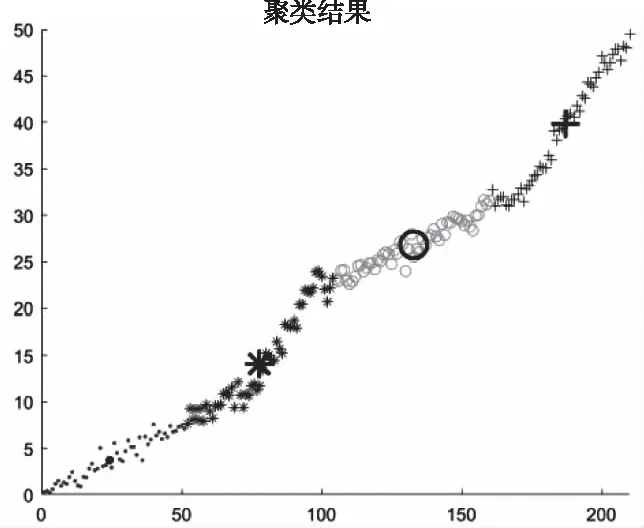
圖3 多階段退化設備監測數據聚類結果
監測數據對于不同聚類中心的隸屬度如圖4所示,可以看出,相比于傳統的C均值聚類,FCM算法可以允許數據同時隸屬于不同聚類中心,對于拐點估計來說,可以對更加準確的對拐點隸屬度進行度量。
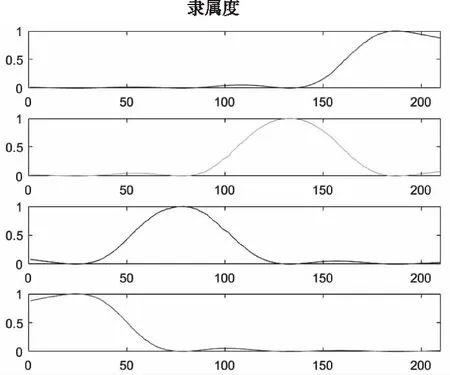
圖4 監測數據對于不同聚類中心隸屬度
通過以上聚類過程,設備退化的3個拐點分別為51、104和160。
3.2 退化設備分階段壽命預測
壽命預測部分實驗首先僅使用ARIMA方法,在未進行拐點選擇的條件下,在輸入60%的監測數據后,對剩余40%退化數據進行預測,預測結果如圖5中紅線所示:
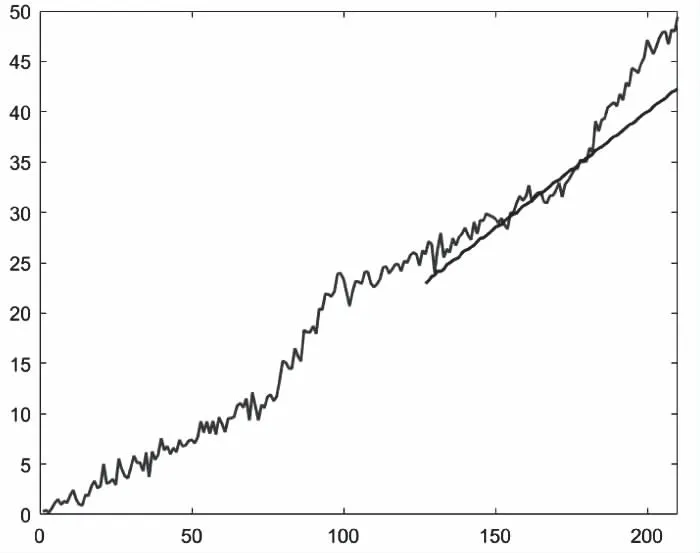
圖5 ARIMA方法壽命預測結果
從圖5的結果可以看出由于設備退化存在多階段特性,在開始時僅用ARIMA方法,預測結果與實際退化量符合較好,但當退化進入下一階段時,方法的預測結果逐漸偏離實際值。
使用本文提出的方法預測結果如圖6中紅線所示,在FCM方法估計拐點后,將設備退化的過程分為4個階段,在每個階段輸入60%數據對剩余40%進行預測。可以看出,預測結果比較好的符合了退化的階段特性,結果優于圖5中結果。
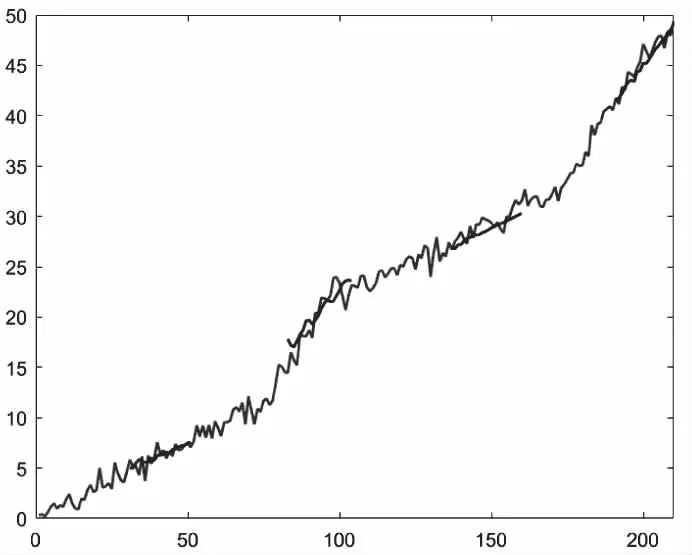
圖6 FCM-ARIMA方法壽命預測結果
5 結束語
本文針對多階段退化設備特性,提出了一種FCM-ARIMA的拐點估計與壽命預測方法,首先分析了多階段退化設備壽命預測的特點和準確性影響因素,將FCM與ARIMA相結合,實現了多階段退化設備拐點估計以及基于拐點分段的壽命預測,并通過實例與未進行拐點估計的方法相比較,驗證了所提出方法的有效性。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
兒童故事畫報(2019年5期)2019-05-26 14:26:14
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
設備管理與維修(2015年12期)2015-04-09 06:57:00