高精密齒輪角度偏差的智能視覺校對(duì)仿真
2021-11-18 05:06:56劉興,李珂
計(jì)算機(jī)仿真 2021年1期
劉 興,李 珂
(廣東技術(shù)師范大學(xué),廣東 廣州 510000)
1 引言
高精密齒輪角度偏差智能視覺校對(duì)仿真的研究背景具體如下:高精密齒輪是機(jī)械傳動(dòng)中必不可少的基礎(chǔ)性零件,具備多種優(yōu)點(diǎn),包括超強(qiáng)的承載能力、平穩(wěn)的傳動(dòng)能力、準(zhǔn)確率極高的傳動(dòng)比等,因此在精密機(jī)械、能源勘探、車輛船舶、宇航工業(yè)等領(lǐng)域都有廣泛的應(yīng)用[1]。高精密齒輪的加工精度與設(shè)計(jì)水平的高低會(huì)對(duì)工業(yè)產(chǎn)品的實(shí)際質(zhì)量產(chǎn)生直接影響,而對(duì)其角度偏差進(jìn)行校對(duì)是提升高精密齒輪加工精度的重要途徑。我國(guó)的高精密齒輪行業(yè)在不斷發(fā)展中已經(jīng)制訂了對(duì)應(yīng)的精度標(biāo)準(zhǔn)并構(gòu)建了較為全面的工業(yè)體系,所加工的高精密齒輪也基本能夠滿足我國(guó)的工業(yè)需求[2]。但我國(guó)高精密齒輪的檢測(cè)、制造、設(shè)計(jì)水平仍然有很大進(jìn)步空間,特別在加工與設(shè)計(jì)技術(shù)、計(jì)算機(jī)軟件、測(cè)量和生產(chǎn)設(shè)備等方面還有很多不足之處[3]。實(shí)際生產(chǎn)出的高精密齒輪由于外部環(huán)境、加工條件等的影響仍然存在角度偏差,使傳動(dòng)系統(tǒng)的傳動(dòng)準(zhǔn)確性、穩(wěn)定性以及齒輪自身壽命等受到影響。因此在高精密齒輪的生產(chǎn)中,其角度偏差智能視覺校對(duì)工作變得尤為重要。對(duì)于高精密齒輪角度偏差智能視覺校對(duì)的研究,國(guó)內(nèi)外都十分重視,并在研究中取得了多樣化的研究成果。
支珊等人提出一種基于齒輪局部圖像的高精密齒輪角度偏差智能視覺校對(duì)方法[4],主要通過(guò)數(shù)據(jù)分割實(shí)現(xiàn)高精密齒輪角度偏差智能視覺校對(duì)。通過(guò)雙閾值法對(duì)高精密齒輪邊緣過(guò)渡帶像素信息進(jìn)行提取,利用組合邊緣測(cè)量方法計(jì)算獲得齒距,此方法能夠有效提升計(jì)算速度。楊振虎提出基于閉環(huán)控制的齒輪傳遞誤差校對(duì)方法[5],主要通過(guò)構(gòu)建網(wǎng)格模型實(shí)現(xiàn)高精密齒輪角度偏差智能視覺校對(duì),計(jì)算高精密齒輪的當(dāng)量嚙合傳遞誤差,通過(guò)位置環(huán)PID控制實(shí)現(xiàn)高精密齒輪角度偏差動(dòng)態(tài)調(diào)控。
由于在利用以上方法進(jìn)行高精密齒輪角度偏差智能視覺校對(duì)時(shí),在齒廓偏差為80-99mm的范圍內(nèi)存在校對(duì)準(zhǔn)確率較低的問題,因此提出一種高精密齒輪角度偏差智能視覺校對(duì)仿真方法。通過(guò)CATIA軟件構(gòu)建高精密齒輪模型,對(duì)高精密齒輪實(shí)施系統(tǒng)標(biāo)定,有效提升齒輪視覺校對(duì)精準(zhǔn)度。
2 設(shè)計(jì)高精密齒輪角度偏差智能視覺校對(duì)仿真方法
2.1 角度偏差特征信號(hào)數(shù)據(jù)提取
通過(guò)白光干涉儀提取高精密齒輪實(shí)際齒面輪廓角度偏差特征信號(hào)數(shù)據(jù),獲取的高精密齒輪實(shí)際齒面輪廓角度偏差信號(hào)數(shù)據(jù)包括角度偏差信號(hào)的波高偏差數(shù)據(jù)與波距偏差數(shù)據(jù)。使用的白光干涉儀的具體性能參數(shù)如表1所示[6]。
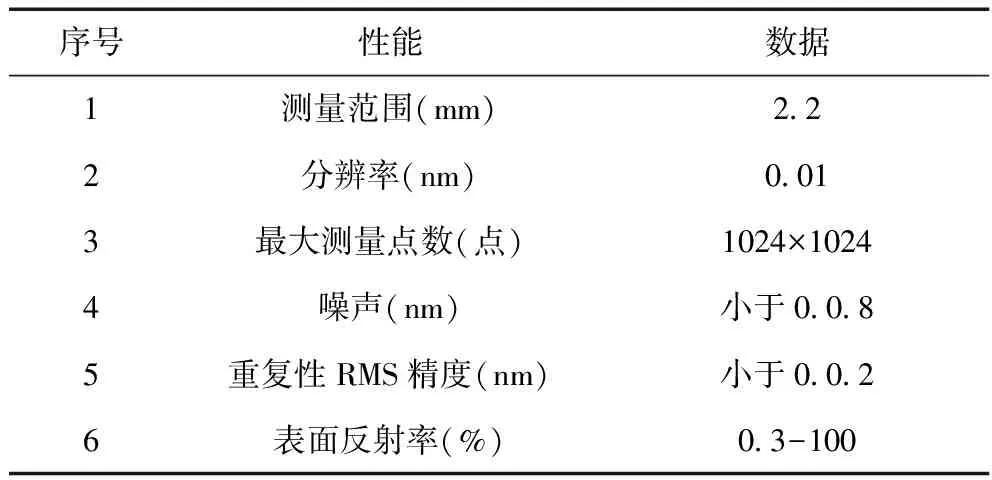
表1 使用的白光干涉儀的具體性能參數(shù)
通過(guò)白光干涉儀獲取的高精密齒輪實(shí)際齒面輪廓角度偏差特征信息具體如圖1所示[7]。
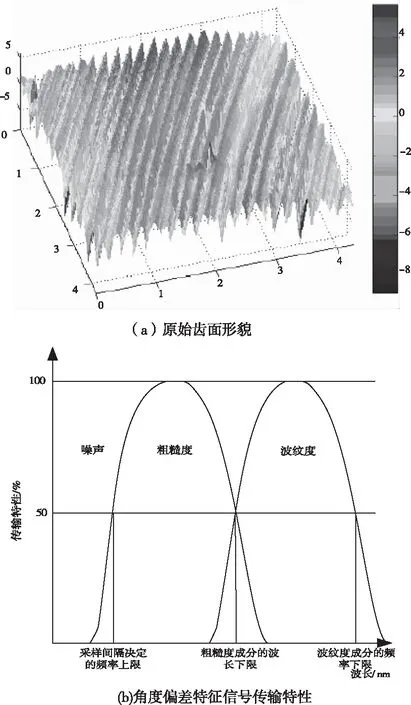
圖1 獲取的高精密齒輪實(shí)際齒面輪廓角度偏差信號(hào)數(shù)據(jù)
S(x)=g(x)·w(x)
(1)
式(1)中S(x)代表獲取的高精密齒輪實(shí)際齒面輪廓角度偏差信號(hào)數(shù)據(jù);g(x)代表波高偏差數(shù)據(jù);w(x)代表波距偏差數(shù)據(jù)[10]。
2.2 高精密齒輪角度偏差建模
通過(guò)軟件CATIA構(gòu)建含有角度偏差的高精密齒輪模型[11,12]。在建模中首先對(duì)齒輪參數(shù)進(jìn)行設(shè)置,具體如表2所示。
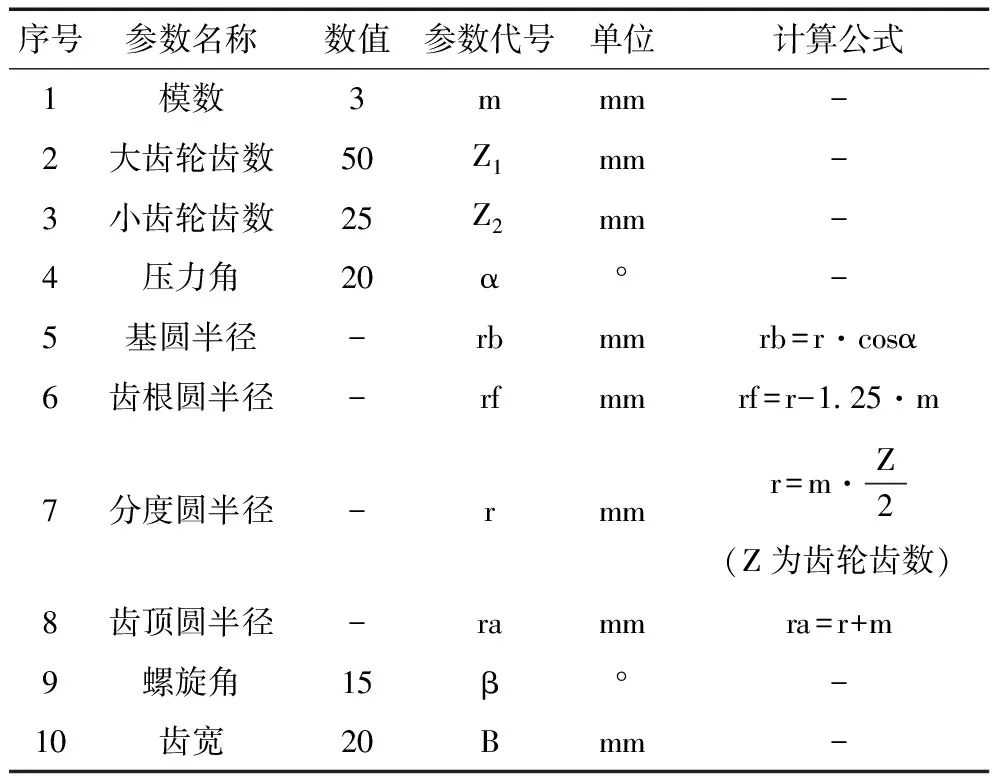
表2 齒輪參數(shù)
構(gòu)建的含有角度偏差的高精密齒輪模型具體如圖2所示。
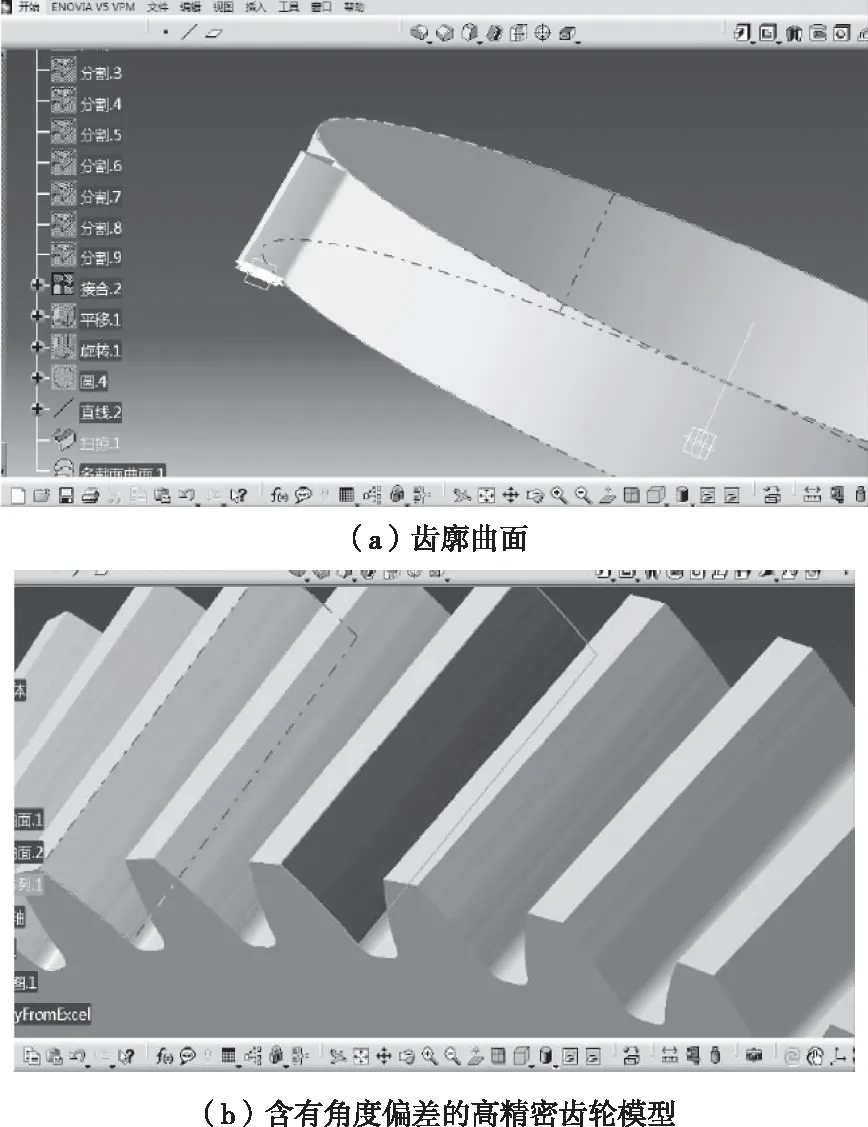
圖2 構(gòu)建的含有角度偏差的高精密齒輪模型
2.3 角度偏差智能視覺校對(duì)
通過(guò)對(duì)高精密齒輪實(shí)施系統(tǒng)標(biāo)定,獲取校正角度偏差后高精密齒輪的投影儀坐標(biāo)與相機(jī)坐標(biāo),利用這兩種坐標(biāo)對(duì)構(gòu)建的含有角度偏差的高精密齒輪模型實(shí)施三維重建,從而實(shí)現(xiàn)高精密齒輪角度偏差的智能視覺校對(duì)。
對(duì)高精密齒輪實(shí)施系統(tǒng)標(biāo)定后,其校正角度偏差后相機(jī)內(nèi)外參數(shù)用Ac、Rc、tc來(lái)表示;投影儀內(nèi)外參數(shù)用Ap、Rp、tp來(lái)表示;相機(jī)投影矩陣用Mc來(lái)表示;投影儀投影矩陣用Mp來(lái)表示,具體如下式所示。
Mc=Ac[Rc|tc]
(2)
Mp=Ap[Rp|tp]
(3)
則可以獲取校正角度偏差后高精密齒輪投影儀坐標(biāo)與相機(jī)坐標(biāo)的圖像齊次坐標(biāo)方程。
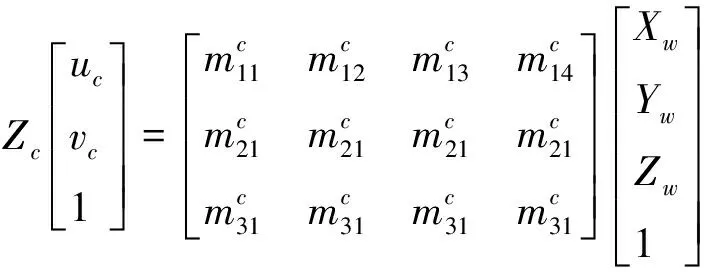
(4)
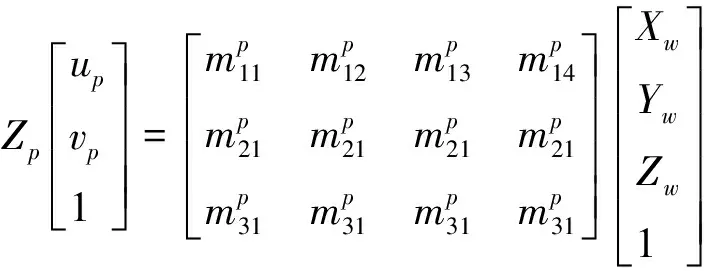
(5)

將以上方程聯(lián)立,消除Zc與Zp,獲取高精密齒輪校正角度偏差后的坐標(biāo)線性方程,該方程與Xw、Yw、Zw相關(guān),具體如下式所示
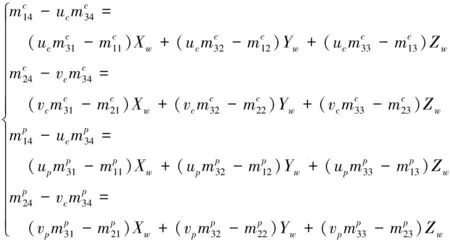
(6)
對(duì)校正角度偏差后高精密齒輪的投影儀坐標(biāo)與相機(jī)坐標(biāo)實(shí)施二階矯正處理,即可獲取Xw、Yw、Zw的實(shí)際坐標(biāo),對(duì)校正角度偏差后高精密齒輪的物體點(diǎn)云進(jìn)行重建,實(shí)現(xiàn)高精密齒輪角度偏差的智能視覺校對(duì)。
3 智能視覺校對(duì)仿真
3.1 仿真設(shè)計(jì)
為證明設(shè)計(jì)的高精密齒輪角度偏差智能視覺校對(duì)仿真方法的性能,對(duì)其進(jìn)行仿真驗(yàn)證。仿真中的高精密齒輪的實(shí)際幾何參數(shù)具體如表3所示。
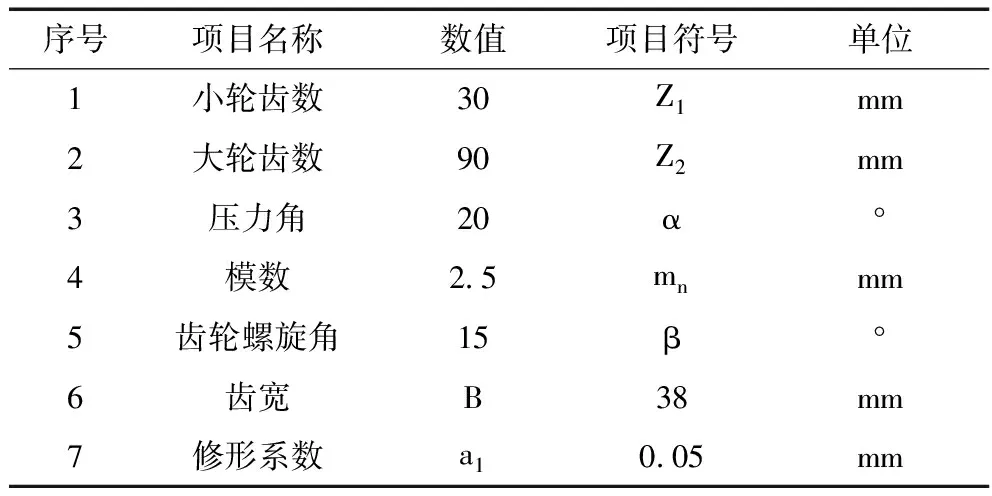
表3 高精密齒輪的實(shí)際幾何參數(shù)
實(shí)驗(yàn)高精密齒輪的實(shí)際基準(zhǔn)偏差信息具體如表4所示。
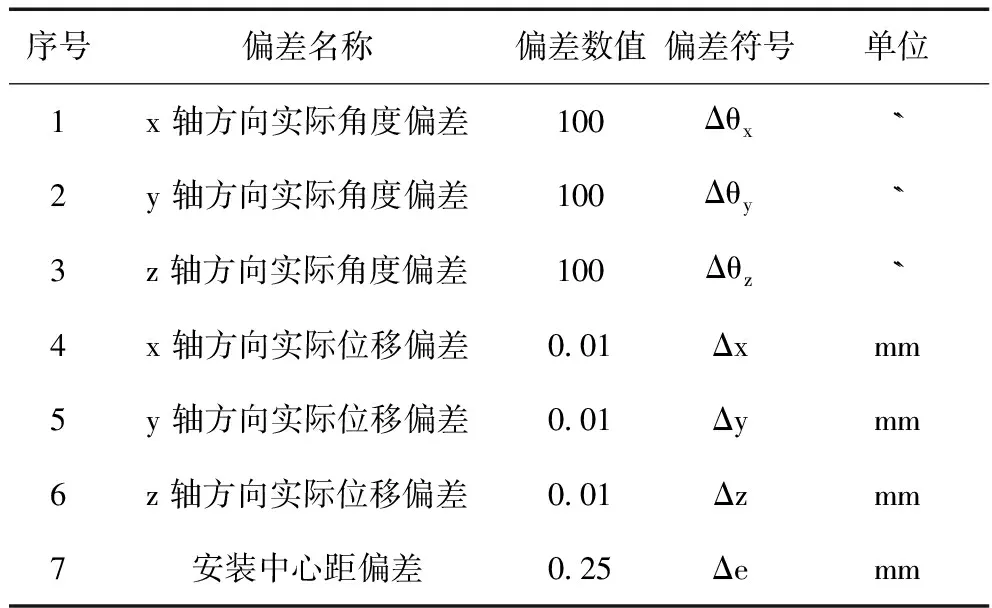
表4 實(shí)驗(yàn)高精密齒輪的實(shí)際基準(zhǔn)偏差信息
實(shí)驗(yàn)高精密齒輪的分析模型具體如圖3所示。
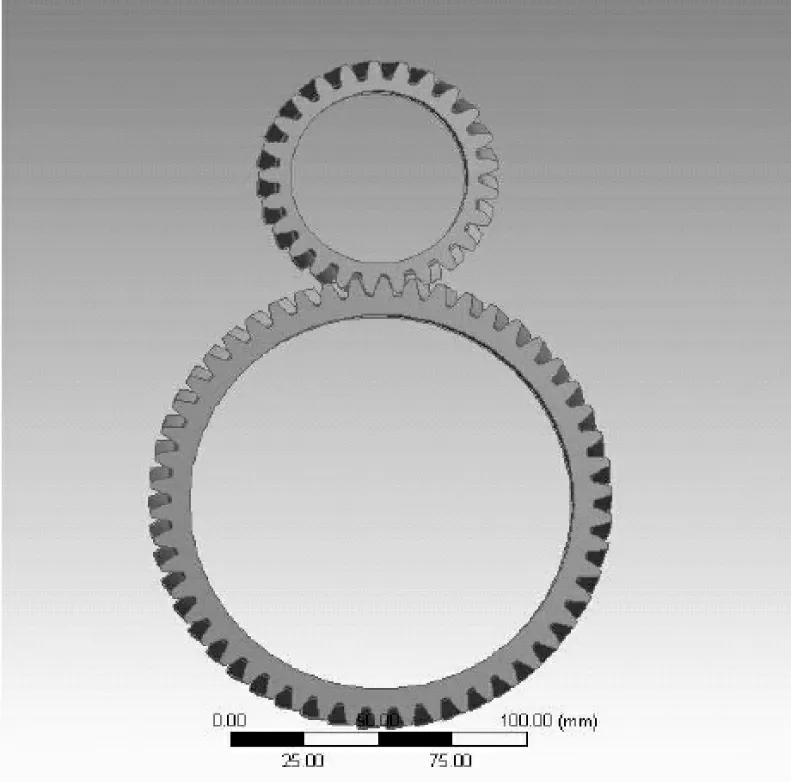
圖3 實(shí)驗(yàn)高精密齒輪的分析模型
利用設(shè)計(jì)的高精密齒輪角度偏差智能視覺校對(duì)仿真方法對(duì)實(shí)驗(yàn)高精密齒輪進(jìn)行角度偏差智能視覺校對(duì)仿真。獲取齒廓偏差為80-99mm范圍的校對(duì)準(zhǔn)確率數(shù)據(jù)作為實(shí)驗(yàn)數(shù)據(jù)。為避免本次實(shí)驗(yàn)結(jié)果較為單一、缺乏對(duì)比性,將原有的兩種高精密齒輪角度偏差智能視覺校對(duì)方法作為實(shí)驗(yàn)中的對(duì)比方法進(jìn)行對(duì)比實(shí)驗(yàn)。分別為齒輪局部圖像校正方法、閉環(huán)控制的校正方法。同樣用這兩種方法進(jìn)行實(shí)驗(yàn)高精密齒輪的角度偏差智能視覺校對(duì)仿真。獲取齒廓偏差為80-99mm范圍的校對(duì)準(zhǔn)確率數(shù)據(jù)作為對(duì)比實(shí)驗(yàn)數(shù)據(jù)。比較幾種實(shí)驗(yàn)方法的校對(duì)準(zhǔn)確率對(duì)比實(shí)驗(yàn)數(shù)據(jù)。
3.2 實(shí)驗(yàn)結(jié)果分析
3.2.1 校對(duì)準(zhǔn)確率
在齒廓偏差為80-89mm的范圍內(nèi),高精密齒輪角度偏差智能視覺校對(duì)仿真方法與基于齒輪局部圖像校正方法、閉環(huán)控制的校正方法的校對(duì)準(zhǔn)確率對(duì)比實(shí)驗(yàn)數(shù)據(jù)具體如表5所示。
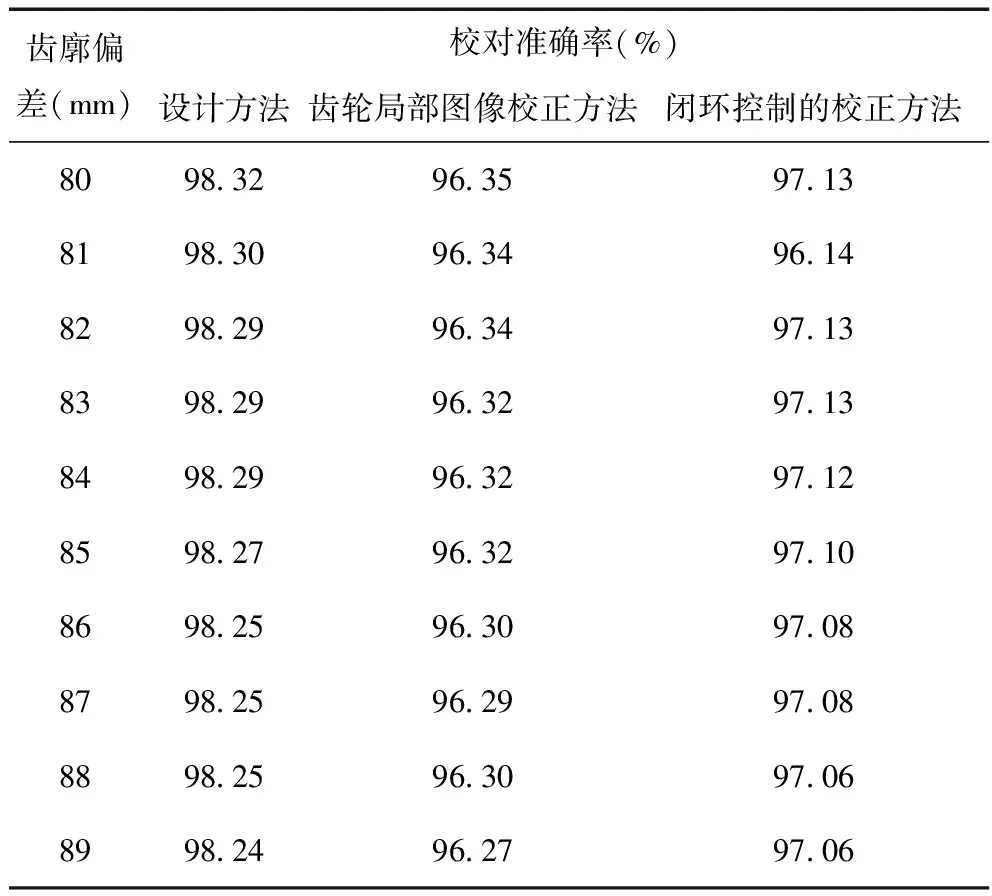
表5 校對(duì)準(zhǔn)確率對(duì)比實(shí)驗(yàn)數(shù)據(jù)
根據(jù)表5的校對(duì)準(zhǔn)確率對(duì)比實(shí)驗(yàn)數(shù)據(jù)可知,在齒廓偏差為80-89mm的范圍內(nèi),高精密齒輪角度偏差智能視覺校對(duì)仿真方法的校對(duì)準(zhǔn)確率高于齒輪局部圖像校正方法、閉環(huán)控制的校正方法。
在齒廓偏差為90-99mm的范圍內(nèi),高精密齒輪角度偏差智能視覺校對(duì)仿真方法與齒輪局部圖像校正方法、閉環(huán)控制的校正方法的校對(duì)準(zhǔn)確率對(duì)比實(shí)驗(yàn)數(shù)據(jù)具體如表6所示。
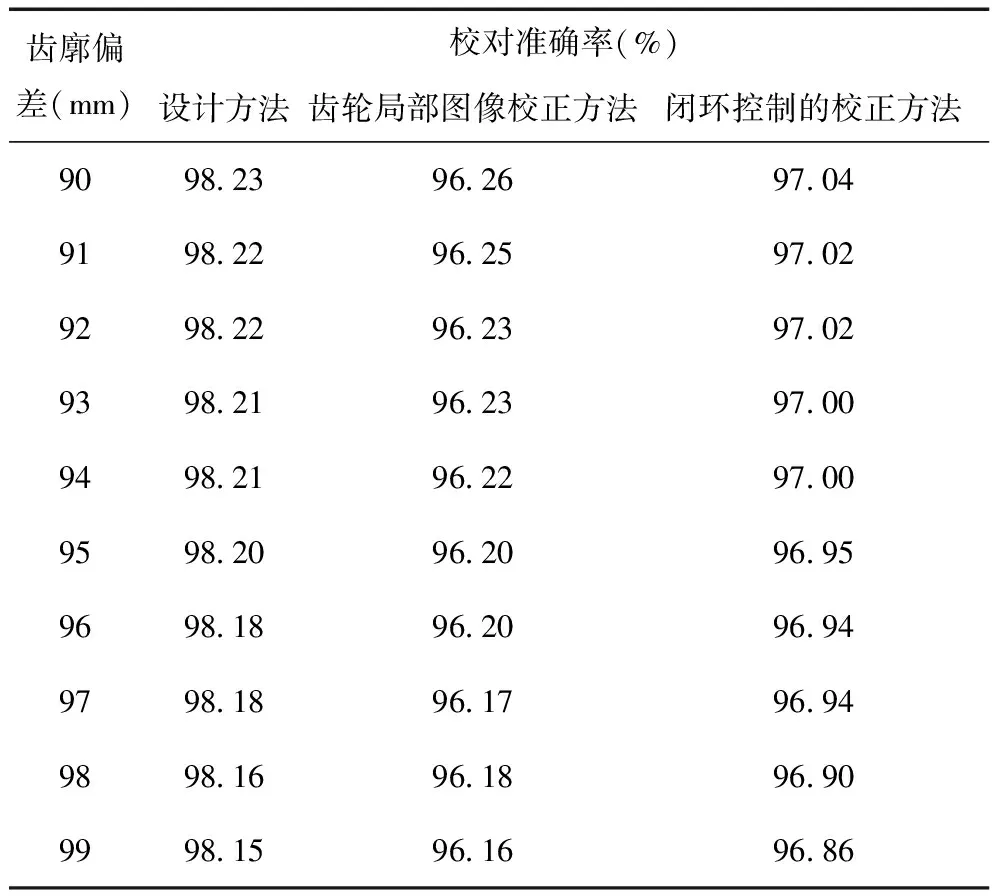
表6 校對(duì)準(zhǔn)確率對(duì)比實(shí)驗(yàn)數(shù)據(jù)
根據(jù)表6的校對(duì)準(zhǔn)確率對(duì)比實(shí)驗(yàn)數(shù)據(jù)可知,在齒廓偏差為90-91mm的范圍內(nèi),高精密齒輪角度偏差智能視覺校對(duì)仿真方法的校對(duì)準(zhǔn)確率高于齒輪局部圖像校正方法與基于網(wǎng)格模型的高精密齒輪角度偏差智能視覺校對(duì)方法。
3.2.2 校對(duì)用時(shí)
為了進(jìn)一步驗(yàn)證不同方法下高精密齒輪角度校對(duì)效率,統(tǒng)計(jì)齒輪局部圖像校正方法、閉環(huán)控制的校正方法以及設(shè)計(jì)方法的校對(duì)用時(shí),得的結(jié)果表7所示。
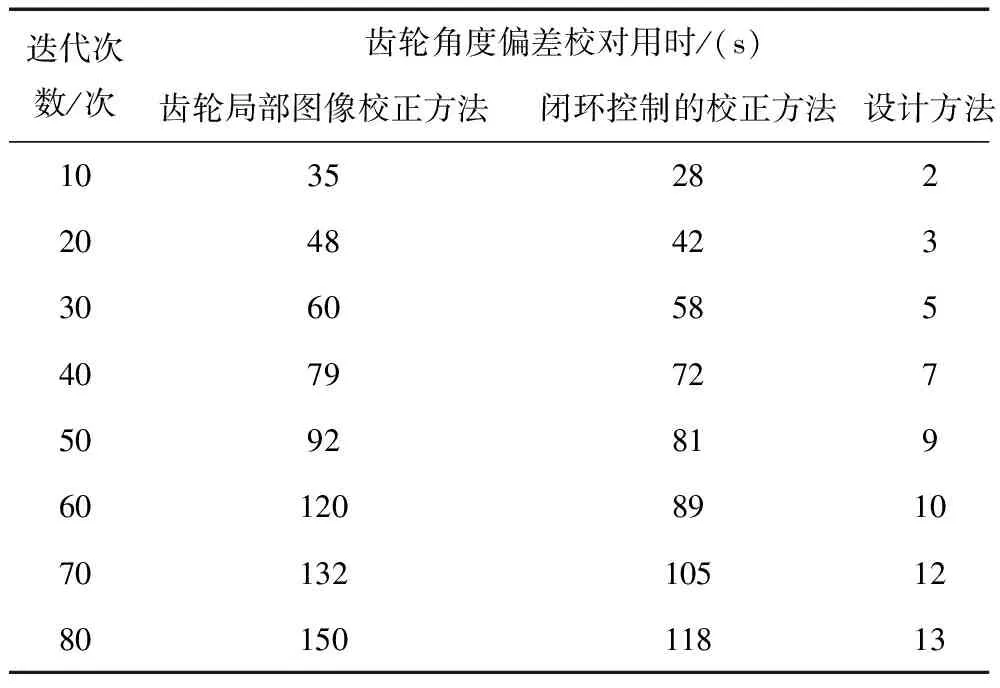
表7 不同方法下齒輪角度偏差校對(duì)用時(shí)
分析表7可知,不同方法下高精度齒輪角度偏差校對(duì)用時(shí)不同。當(dāng)?shù)螖?shù)為10次時(shí),齒輪局部圖像校正方法的齒輪角度偏差校對(duì)用時(shí)為35s,閉環(huán)控制的校正方法齒輪角度偏差校對(duì)用時(shí)為28s,設(shè)計(jì)方法的齒輪角度偏差校對(duì)用時(shí)為2s。當(dāng)?shù)螖?shù)為30次時(shí),齒輪局部圖像校正方法的齒輪角度偏差校對(duì)用時(shí)為60s,閉環(huán)控制的校正方法齒輪角度偏差校對(duì)用時(shí)為58s,設(shè)計(jì)方法的齒輪角度偏差校對(duì)用時(shí)為5s。當(dāng)?shù)螖?shù)為80次時(shí),齒輪局部圖像校正方法的齒輪角度偏差校對(duì)用時(shí)為180s,閉環(huán)控制的校正方法齒輪角度偏差校對(duì)用時(shí)為118s,設(shè)計(jì)方法的齒輪角度偏差校對(duì)用時(shí)為13s。設(shè)計(jì)方法的齒輪角度偏差校對(duì)用時(shí)遠(yuǎn)遠(yuǎn)低于其它兩種方法,具有較高的校對(duì)效率。這是因?yàn)樵O(shè)計(jì)方法獲取了波高偏差數(shù)據(jù)與波距偏差數(shù)據(jù),構(gòu)建了高精度齒輪三維模型,提升了誤差校對(duì)效率。
4 結(jié)束語(yǔ)
傳統(tǒng)的齒輪角度偏差校對(duì)方法存在高精密齒輪角度校對(duì)準(zhǔn)確率較低、校對(duì)時(shí)間過(guò)長(zhǎng)等問題,為此,文章提出高精密齒輪角度偏差的智能視覺校對(duì)方法。通過(guò)仿真實(shí)驗(yàn)得出以下結(jié)論:
1)齒廓偏差為80-89mm的范圍內(nèi),設(shè)計(jì)方法的齒輪角度偏差校對(duì)準(zhǔn)確率高達(dá)98.32%;齒廓偏差為90-91mm時(shí),設(shè)計(jì)方法的齒輪角度偏差校對(duì)準(zhǔn)確率高達(dá)98.23%,證明設(shè)計(jì)方法具有較高的校對(duì)準(zhǔn)確率。
2)迭代次數(shù)為80次時(shí),設(shè)計(jì)方法的齒輪角度偏差校對(duì)用時(shí)僅為13s。說(shuō)明設(shè)計(jì)方法具有較高的校對(duì)效率。
綜上可知,高精密齒輪角度偏差智能視覺校對(duì)仿真方法實(shí)現(xiàn)了校對(duì)準(zhǔn)確率的提升,對(duì)于傳動(dòng)系統(tǒng)傳動(dòng)準(zhǔn)確性、穩(wěn)定性以及齒輪自身壽命的提升有很大意義。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
