基于三維全景技術的智慧礦山信息采集系統設計與應用
2021-11-21 09:44:00孫莎莎
世界有色金屬 2021年15期
孫莎莎
(北京中色地科測繪有限公司,北京 101300)
三維全景技術是一種將圖像進行數字化處理的技術,其中該技術的基礎就是全景圖像。全景圖像即利用無人機對所需要探測的區域進行環繞型拍攝,將所采集到的圖像信息進行融合和拼接,然后實現圖像的三維實景瀏覽,該技術目前常用于一些復雜類型礦區的信息采集[1]。因此,本文設計了借助三維全景技術采集礦山信息的系統。現有的信息采集技術存在建模難度大、工作量大的問題,而3D全景技術可以通過圖像自動拼接的方式批量合成三維實景圖像,實現對真實場景的快速建模,大大減少建模工作量。在降低成本的同時,顯得更加真實直觀,后期數據更新也將更加方便快捷[2]。基于3D全景技術的智慧礦山信息采集系統可以直觀地了解和觀察礦山地形和礦山現場信息,為礦山設計提供良好的環境,也可以幫助專家判斷各種原始數據,作出正確的決策。
1 數據采集設備選取
(1)多光譜傳感器。根據需要研究的礦區地形,本文選取了多光譜傳感器,該傳感器可以應用于復雜地形的數據采集,多光譜傳感器最鮮明的特點就是其鏡頭的分光不同,選取的傳感器類型有單鏡頭和多鏡頭。選取的原則主要根據其使用的環境來綜合判斷,如果采集數據時,需要采集的地區需要使用高空進行采集,這種情況下就需要采用多鏡頭進行采集,相對來說,多鏡頭比單鏡頭優勢明顯,其在高點和低點均可以進行采集,而單鏡頭使用的環境比較單一。此次選用的是德國公司生產的多光譜傳感器,其因輕便且分辨率高被廣泛應用于礦山數據信息采集工作中,其收集面非常廣,可以采集到很多不連續的光譜段,可以有效解決圖像信息提取率低的問題。
(2)多旋翼無人機。目前信息采集使用的無人機有很多種類型,常見的無人機類型有無人直升機,傘翼機等,本文選取的是多旋翼無人機,多旋翼無人機體積小、重量輕,可以自由懸停,且不需要彈射器、發射架進行發射。多旋翼無人機完全符合本系統設計的需求,可以將數據平臺搭建的更加完整,方便數據的采集和調試,多旋翼無人機可以進行多方面采集輸出,保證數據采集的環境。
2 智慧礦山信息采集終端設計
2.1 使用AT指令連接智慧礦山信息采集單元
采集信息的第一步是要與智慧礦山的各個單元模塊進行連接,連接各個單元的指令本文選取AT指令,該指令可以完美的實現將各個信息單元相連,還可以進行通信。需要注意的是,每個指令具有專一型,一個指令控制區域也只有一個,多種反饋是不被允許的,結尾選用回車鍵,指令與功能連接圖如圖1所示。
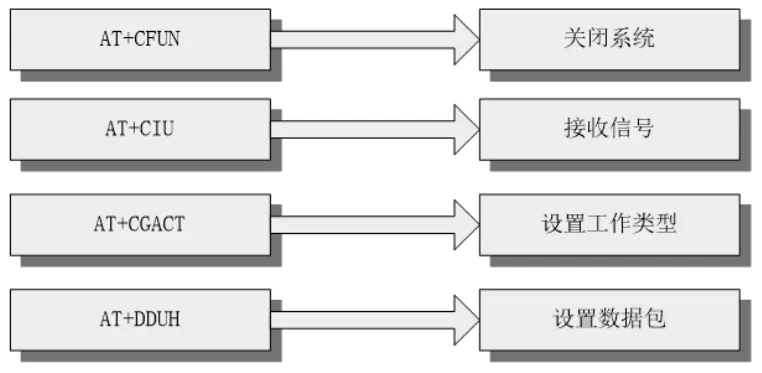
圖1 AT指令與功能
如圖1所示,數據接收的效率與指令的狀態有關,采集數據后,各個指令在指定的接口進行統一匯合,系統模塊接收時只需要在接口進行。
2.2 基于三維全景技術生成智慧礦山信息圖像
目前智慧礦山信息生成圖像的方式主要基于三維全景技術,該技術可以進行任意場景的融合與拼接,場景圖像的采集采用魚眼鏡頭在每個采集點拍攝若干張照片,但是上下需要各有1張,水平位置每旋轉90°拍攝1張。
如圖2所示,因為采用的鏡頭為魚眼鏡頭,該鏡頭可以確保相鄰2幅圖像間均有重疊的區域,這樣可以以重疊區域為參考模型進行全景拼接。本研究采用三維全景技術完成全景圖像的自動拼接,處理流程如圖2所示。因在使用傳統的無人機遙感影像技術中圖像特征點匹配存在一定問題,文章在礦山信息圖像特征點匹配方法改進基礎上,提出了三維全景技術。
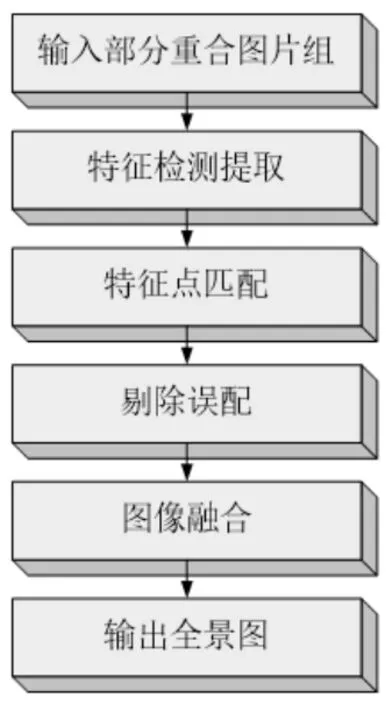
圖2 處理流程
2.3 實現基于三維全景技術的智慧礦山信息采集
在該系統中,信息數據采集終端利用串口與多光譜傳感器連接,從傳感器獲取生產設備或其他方面的信號,經過終端設備的模數轉換處理,再通過網絡將數據發送給監控中心的計算機組,由監控中心對所有采集到的信息進行統一管理。智慧礦山信息數據采集系統可實現生產信息的傳輸、信息自動采集等方面處理,具體如下:
(1)生產數據全面感知。數據采集系統獲得數據的基本途徑是對生產流程的全面監測,而承擔監測工作的是大量數據采集終端和傳感器。這些傳感器負責從采集對象處獲得物理量,由終端設備負責定時采集。
(2)傳感器兼容性好。數據的種類不同,所需要的傳感設備也不同,數據采集系統能利用更多的傳感器就能夠豐富可采集數據的形式和內容。
(3)信息傳遞可靠。數據釆集系統的網絡可以由有線或無線組成。無論是哪一種形式的網絡,數據的完整、快速傳遞到監控中心的計算機組,是網絡數據傳輸的最終目標。因此,數據采集系統實質上是一種連接了終端的智慧礦山專用網絡。
2.4 智慧礦山信息采集系統的應用場景
智慧礦山信息采集系統有效解決了礦山開采相關地質信息跟蹤模擬、動態圖像更新問題。礦企進行開采作業時,需逐步向更深區域進行采掘,基于三維全景技術的礦山信息采集系統可以實現地質測量數據持續更新,此種方便快捷的更新機制更利于礦山作業人員掌握工作區域實際變化情況,針對變動狀況做出真實反映。通過對礦山作業人員定位,掌握人員的作業行為;礦山信息圖像特征點高度匹配,可確保作業場所與所設定開采區域相一致,另外系統實現了對機械設備實施管理,便于礦山作業人員查看設備運行參數,判斷設備運行情況。
3 實驗
為了檢測本文設計的基于三維全景技術的智慧礦山信息采集系統是否能準確有效的采集智慧礦山的信息,且其與傳統的信息采集系統相比是否具有明顯的優勢,進行的實驗如下。
(1)實驗準備。在本實驗中,全景瀏覽是使用PTViewer進行的。PT-Viewer是用JAVA語言編寫的開源全景瀏覽組件,可以在任何支持JAVA APPLET的瀏覽器上運行。遠景、近景、左右景、頂視圖都可以形成多個場景。熱點之間的切換是熱點交互的一個特征。PT-Viewer使用球體來投影水平遮擋的全景圖像。垂直范圍可以是介于兩者之間的任何值。在球面投影平面的放大視圖中,水平軸和垂直軸與視角成正比,PT-Viewer的圖像可以通過編程方式加密,加密后的圖像無法被標準圖形程序讀取。
(2)實驗結果與討論。隨機選取了7塊智慧礦山地形,分別采用傳統的基于無人機遙感技術的信息采集系統和本文設計的基于三維全景技術的智慧礦山信息采集系統分別進行信息采集,檢測其采集完全部區域所用的時間,實驗結果如下表1所示。

表1 實驗結果
由表1可知,本文設計的智慧礦山信息采集系統能有效準確地采集智慧礦山信息,且與傳統的方法相比,消耗的時間更少,因此具有省時性。
智慧礦山信息采集具有抽象性、宏觀性和綜合性,應用三維全景技術可以直接獲取礦山宏觀信息和微觀信息,如智慧礦山的環境信息、基礎設施布局等。與傳統的技術相比三維全景技術可從不同層次全面掌握礦山地形情況,輔助完成智慧礦山信息圖像采集。
4 結語
綜上所述,本文設計的基于三維全景技術的智慧礦山信息采集系統可以有效地采集智慧礦山的信息,對礦山地形信息研究具有重要的意義,經過實驗證明其所用時間低于傳統的方法,因此具有省時性,有一定的推廣價值,但由于礦山地區的地形錯綜復雜,面對不同地形時可能結果會產生微小變化,因此需要在后續的應用中進行調整改進。
猜你喜歡
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
小天使·一年級語數英綜合(2014年6期)2014-07-22 23:32:38
智慧與創想(2013年7期)2013-11-18 08:06:04
網球俱樂部(2009年9期)2009-07-16 09:33:54
祝您健康(1987年3期)1987-12-30 09:52:32
