改進自適應遺傳算法在多載AGV調度的應用研究
2021-11-22 08:03:02張承瑞孫玉璽
小型微型計算機系統 2021年11期
劉 暢,張承瑞,孫玉璽
(山東大學 機械工程學院,濟南 250061)
(山東大學 高效清潔機械制造教育部重點實驗室,濟南 250061)
1 引 言
隨著工業4.0時代的智能工廠的引入,工廠規模越來越大,對自動導引運輸車(Automated Guided Vehicle,AGV)的需求量變大,調度復雜性增加,AGV調度機制應該更加高效、魯棒.
現在已經有很多學者對多AGV調度進行研究.Valerio Digani,M.Ani Hsieh等[1]提出一種優化策略,來最大化AGV的吞吐量;Bai Li,Hong Liu,Duo Xiao等人[2]提出一種集中式多AGV運動規劃方法,計算效率更高.但是,國內外研究的多AGV路徑規劃問題大多數是基于單負載,對多負載AGV的研究較少.
Azimi等[3]較早的研究了多載AGV調度需要解決的問題.Ho Y-C,Chien S-H研究多負載AGV的相關問題[4],并且重點研究了多負載AGV的提取分配原則[5].霍凱歌等[6],已經對自動化集裝箱碼頭中的多載AGV調度問題進行研究,他們發現,多載AGV比單載AGV效率更高.Li-xiang Zhang等[7]研究了在自動化汽車裝配線環境下,多載AGV高效運輸物料的問題,并使用遺傳算法進行求解.Li-zhen Du等[8]研究了在紡織車間環境下,多載AGV運輸物料的問題,并且使用混合遺傳算法和粒子群算法進行求解.
隨著任務的維數增加,傳統算法求解的時間復雜度大.所以,國內外很多學者使用智能算法(如頭腦風暴算法[9]、粒子群優化算法[10])來對多AGV調度問題進行求解.
上述論文中,大多只是簡單的假設多載AGV運輸1個或2個負載,只考慮負載重量的約束,卻沒有考慮負載的體積約束.
本文第2節描述多載AGV調度問題的環境,第3節對路徑規劃問題進行建模,第4節對初始數據進行預處理之后,使用改進的自適應遺傳算法進行求解,第5節將改進的自適應與標準遺傳算法和自適應遺傳算法進行比較.
2 問題描述
對于工廠的物料運輸問題,在傳統的單載AGV模型中,不需要考慮體積、重量約束,只是將一種物料運輸到目的地,一次只執行一個任務.這極大的浪費了AGV的負載能力.
如圖1所示,AGV沒有任務時,會停靠在充電區域(charge area),進行充電或者待機.任務集合發布時,AGV從充電區域(charge area)來到倉庫(warehouse).在不超過AGV體積、重量約束的條件下,根據調度算法求解得結果進行加載貨物,然后正式開始運輸貨物.在圖1的多載AGV運輸物料示意圖中,AGV可以根據任務需求自由地到達任意一點.當AGV負載為空時,會返回倉庫(warehouse)進行下一個任務的運載.周而復始,直到所有任務完成后,AGV會回到充電區域進行充電或者待機,直到下一個任務集合的到來.
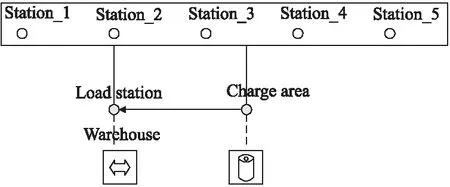
圖1 多載AGV運輸物料示意圖
3 建立模型
本文主要解決的是工廠環境下如何高效調度多載AGV的問題.
3.1 符號說明與模型假設
符號說明
M:表示路徑規劃的路徑數目;
Ni:表示在規劃的第i路徑中,執行任務點的數目;
cij:表示在規劃的第i條路徑中,從倉庫出發到第j個任務點所產生的成本;
Gij:表示在規劃的第i條路徑中,第j個任務點所需要的物料的重量;
G:表示多載AGV可承受的最大重量;
Vij:表示在規劃的第i條路徑中,第j個任務點所需要的物料的體積;
V:表示多載AGV可承受的最大體積;
Aijk:表示第k個任務是否在第i條路徑的第j個任務點被執行;
K:表示任務總數目;
d_list:表示只能被單個運輸的任務點形成的路徑;
dd_list:表示被最短路徑模型求解后得到的路徑集合;
p_list:表示d_list和dd_list兩個集合的并集.
模型假設
1)單個任務的負載不會超過多載AGV的最大載重約束和體積約束;
2)AGV行駛單位長度,成本相同;
3)AGV勻速行駛.
3.2 調度模型
目標函數:
(1)
約束函數:
(2)
(3)
(4)
(5)
公式(1)為模型的目標函數,為距離函數矩陣,表示路徑的成本;公式(2)為多載AGV的重量約束;公式(3)為多載AGV的體積約束;公式(4)、公式(5),約束任務能且只能被一輛多載AGV完成.
4 改進的自適應遺傳算法
遺傳算法[11]實現簡單,通用性強,易于和其它算法結合,具有并行性和魯棒性.但是,它也存在過早收斂、局部搜索能力弱等問題.
針對標準遺傳算法的上述不足,本文在自適應遺傳算法的基礎上,加入災變操作與逆變操作,提出一種改進的自適應遺傳算法(Improved Adaptive Genetic Algorithm,IAGA),如圖2所示,其為改進自適應遺傳算法的流程圖.
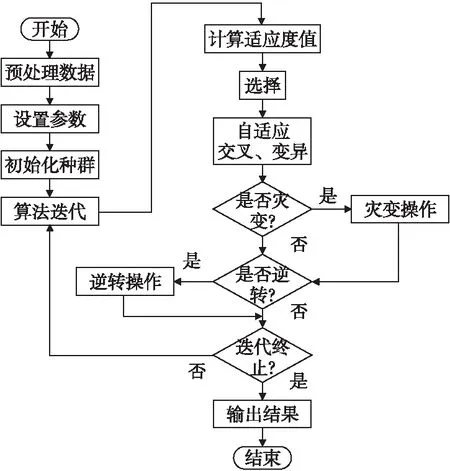
圖2 IAGA流程圖
在初始化種群后,算法進入迭代部分,進行選擇、交叉、變異操作.
然后進入災變操作,根據適應度值,求解災變算子,判斷是否執行災變操作,災變算子隨著陷入局部極值迭代次數的增加,不斷的增加種群的交叉概率和變異概率,使算法更容易跳出局部極值.
之后,進入逆轉操作,即局部搜索部分.當滿足逆轉條件后,進入逆轉操作.在逆轉操作中,添加了倒序操作與插入操作.選取種群的部分染色體,根據倒序概率和插入概率,判斷是否進行倒序操作或者插入操作,執行完畢后,將操作后的染色體的適應度值,與操作前的適應度進行比較.適應度值變大時,才會接受新解.算法將沿著適應度變高的方向進行進化.
最后根據迭代終止條件(迭代次數或者收斂),判斷是否終止迭代.
4.1 適應度函數
目標函數為最小路徑.為了方便編程和簡化智能算法的迭代過程,本文使用懲罰函數的方式,將重量的約束與體積約束,加入到成本函數中.適應度值為成本的倒數,成本越大,適應度越小.適當調整α,β的值,滿足各個AGV的載重約束和體積約束.
(6)
(7)
4.2 自適應策略
自適應交叉算子、變異算子
本文采取文獻[11]中,正弦自適應遺傳算法的遺傳算子的求解公式.
(8)
(9)
其中,pc為交叉概率;pm為變異概率;pc1為種群的最大交叉概率;pc2為種群最小交叉概率;pm1為種群的最大變異概率;pm2為種群最小變異概率;fm為種群的最大適應度;fa為種群平均適應度;f′為染色體個體適應度;
自適應遺傳算子隨著適應度的變化而不斷變化,可以很好地提高遺傳算法的收斂速度和性能.
自適應災變算子
傳統的災變算子是固定值,導致對每個算例的適應性不強,需要不斷調整.
本文提出一種自適應災變算子,它隨著陷入局部極值的代數的增加,不斷增加交叉概率與變異概率,使整個種群跳出局部最優解.

(10)
(11)
(12)
(13)

災變算子的自適應調整,如圖3所示,在算法迭代初期,種群適應度急劇變化階段,不會發生作用.在種群陷入局部極值后,隨著陷入極值的時間越長,災變算子使得交叉概率和變異概率不斷增大.
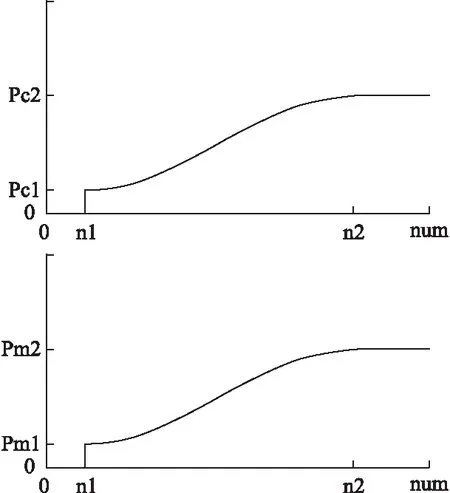
圖3 災變階段交叉概率、變異概率變化量
自適應逆轉算子
本文提出一種自適應逆轉算子,隨著總迭代次數的增加,逆轉算子不斷改變,使得種群進行逆轉操作的概率增大.
(14)
其中,Pi為執行逆轉操作概率;Pim為最大逆轉概率;T為迭代周期;ite為迭代次數.
如圖4所示,在算法的迭代初期,種群的多樣性大,不需要過多的進行逆轉操作.在算法的后期或者迭代陷入局部最優值時,適當的進行逆轉操作,既可以增加種群的多樣性,也有利于跳出局部極值.而且,逆轉操作使得種群向著更加有利的方向進行進化,容易跳出局部極值.
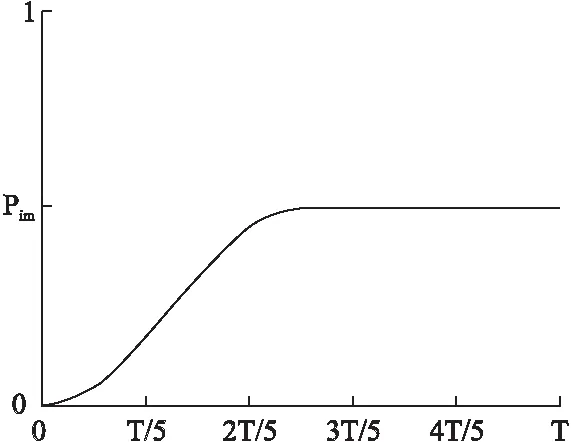
圖4 逆轉操作概率的自適應調整
4.3 算法基本流程
4.3.1 數據預處理
1)剔除重量大或者體積大的任務
分析所有任務點需要的物料的重量與體積,刪除重量很大或者體積很大、無法與其他物料進行一起運輸的物料訂單.這樣的物料只能單載運輸.形成單載AGV路徑集d_list.之后,智能算法求解多載AGV路徑集合dd_list.
剔除重量大或者體積大的任務,將其組合成單獨的任務隊列,可以減少調度系統的搜索的維度,使得算法求解的效率更高,速度更快.
2)根據數據提供的x坐標與y坐標,計算直線距離,提前生成距離矩陣,避免在程序計算中重復計算,降低程序的計算量.
4.3.2 調度模型求解
編碼與解碼
采用實數編碼的策略.常見的二進制編碼雖然簡單易行,不適合高維、高精度優化問題.這里采用實數編碼.
倉庫的編碼:0,分割各個字符串.例如:任務點1-4為一組,6-9為一組,11-14為一組,編碼后的染色體的編碼字符串,1-2-3-4-0-6-7-8-9-0-11-12-13-14,這就是編碼過程.解碼過程則相反.
選擇
本文采用輪盤賭選擇方式.根據每個個體的適應度,按照比例進行概率選擇.適應度越大的染色體被選中的概率越大,反之,適應度越小的染色體被選中的個體越小.
交叉、變異
采用兩點交叉方式.隨機選中小于染色體編碼長度的兩個數,將它與臨近的染色體相同位置進行交換.但是由于采用的是實數編碼.所以,交叉操作完成之后,相應的染色體內部,需要進行調整.
采用單點變異的方式.因本文采用的是實數編碼,所以單點變異后,需要進行調整.
逆轉
選出部分種群,根據設定好的概率(倒序概率,插入概率),使用逆序排列,插入排列的方式,保留適應度值增大的染色體,否則恢復大原基因排列.這樣做的目的,一是增加種群的多樣性,二是可以向著種群適應度值高的方向進化.
調整
因采用實數編碼,除0外的其他實數應保持數字的唯一性,當進行交叉變異等操作后,需要進行調整,來滿足染色體數字的唯一性.
5 仿真驗證
本文的實驗環境為:Windows 10+MATLAB 2014b.本文的算例由Solomon[12]提出的算例調整修改而來,任務數據包括位置,重量約束,體積約束初始任務數據包括位置,重量約束,體積約束.搭建了一個倉庫點,(N-1)個工作站,在共N個點的環境.多載AGV能承受負載的最大重量為4,多載AGV能承受負載的最大體積為4.
分別在N為30,60,90 3個規模下,各做10組實驗,取得3種規模下,改進的自適應遺傳(IAGA),標準遺傳算法(Standard Genetic Algorithm,SGA),自適應遺傳算法(Adaptive Genetic Algorithm,AGA)算法,3種算法收斂的迭代次數、迭代時間、迭代精度.
分析圖5可知,在相同的迭代次數下,改進的自適應遺傳算法比標準遺傳算法、自適應遺傳算法收斂速度更快、更加接近最優值.
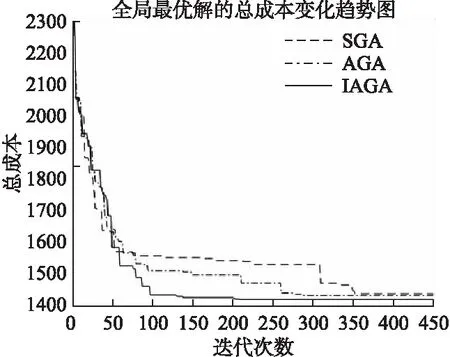
圖5 N=30,各個算法迭代變化趨勢
由表1-表3,比較3種算法在N=30,60,90維度下的的迭代次數、迭代時間、收斂解,可知,改進的自適應遺傳算法迭代次數更少、達到收斂的時間更短,收斂解更加接近最優解.
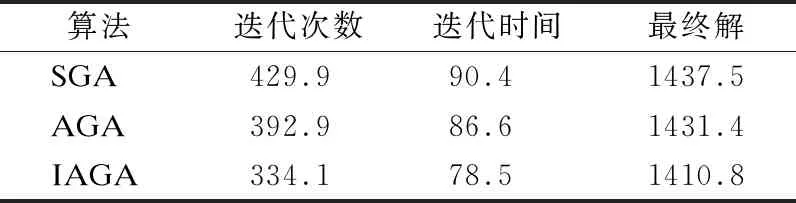
表1 N=30,各個算法比較
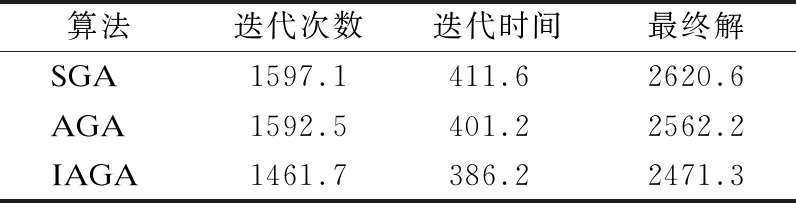
表2 N=60,各個算法比較
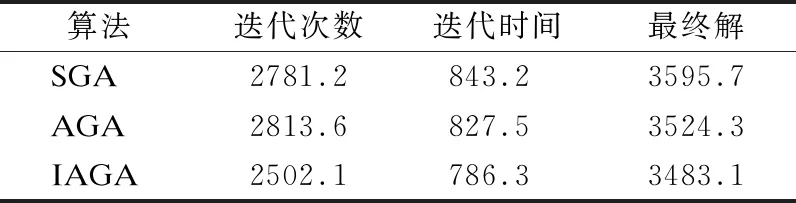
表3 N=90,各個算法比較
6 結 論
本文中,多載AGV調度問題是一個添加了物料體積、重量雙重約束的VRP(Vehicle Routing Problem,車輛路徑規劃問題)問題.本文首先對數據進行預處理,降低求解變量的維度,然后使用改進的自適應遺傳算法(IAGA)進行求解,最后,分別在數據維度N=30,60,90時,進行多組實驗取平均值.與標準遺傳算法(SGA)、自適應遺傳算法(AGA)相比,改進的自適應遺傳算法收斂快,優化效果明顯,收斂精度高.
在求解過程中也發現一些不足:1)在任務合并尋優過程中,迭代時間長,可以進一步改進算法或者調整參數來進行加快收斂;2)本文沒有考慮時間約束,在后續工作中可以加入時間窗約束.
