永磁同步電機(jī)模型預(yù)測(cè)電流控制比較研究*
2021-11-22 04:25:54蘇曉楊蘭志勇蔡兵兵
電機(jī)與控制應(yīng)用 2021年10期
關(guān)鍵詞:控制策略
蘇曉楊, 蘭志勇, 蔡兵兵
(1.湘潭大學(xué) 自動(dòng)化與電子信息學(xué)院,湖南 湘潭 411105;2.江麓機(jī)電集團(tuán)有限公司,湖南 湘潭 411105)
0 引 言
具有功率密度高、可靠性好、運(yùn)行效率高等優(yōu)點(diǎn)的永磁同步電機(jī)(PMSM)廣泛應(yīng)用于軌道交通、航天航空、數(shù)控伺服等高性能調(diào)速系統(tǒng)領(lǐng)域[1]。PMSM應(yīng)用場(chǎng)合對(duì)控制精度要求的提高使矢量控制與直接轉(zhuǎn)矩控制逐漸難以滿足需求。隨著數(shù)字處理器性能的提升,結(jié)構(gòu)簡(jiǎn)單、動(dòng)態(tài)響應(yīng)快的模型預(yù)測(cè)控制(MPC)得到了更廣泛的應(yīng)用[2-3]。
線性MPC稱為有限控制集模型預(yù)測(cè)控制(FCS-MPC),選取電流為優(yōu)化目標(biāo)的FCS-MPC稱為模型預(yù)測(cè)電流控制(MPCC)[4]。傳統(tǒng)MPCC在單個(gè)采樣周期只輸出一種開關(guān)狀態(tài)對(duì)應(yīng)的電壓矢量,也稱為單矢量MPCC。但對(duì)于兩電平逆變器的PMSM驅(qū)動(dòng)系統(tǒng)來(lái)說(shuō),由于單矢量MPCC輸出的僅為6個(gè)方向幅值固定的有效電壓矢量或零矢量,在穩(wěn)態(tài)運(yùn)行狀態(tài)下存在電流波動(dòng)較大的問題。為改善其控制效果,由單矢量MPCC逐漸發(fā)展為多矢量MPCC,在單個(gè)采樣周期不只發(fā)出一個(gè)電壓矢量。占空比MPCC是雙矢量MPCC中的一種,文獻(xiàn)[5-7]中均采用占空比MPCC,但占空比的計(jì)算方法不同。文獻(xiàn)[5]通過使電流矢量誤差最小化的方法來(lái)確定占空比;文獻(xiàn)[6]通過q軸電流無(wú)差拍原則計(jì)算占空比;文獻(xiàn)[7]中構(gòu)建了關(guān)于矢量作用時(shí)間的價(jià)值函數(shù),并根據(jù)dq軸電流無(wú)差拍原則計(jì)算占空比。文獻(xiàn)[8]采用雙矢量MPCC策略,第二電壓矢量可選擇有效電壓矢量與零矢量。文獻(xiàn)[9-13]采用三矢量MPCC,文獻(xiàn)[9]將相鄰2個(gè)有效電壓矢量與零矢量合成的虛擬電壓矢量作為備選電壓矢量;文獻(xiàn)[10-11]中采用無(wú)差拍原理計(jì)算最優(yōu)虛擬電壓矢量,將其所在扇區(qū)邊界有效電壓矢量與零矢量作為輸出;文獻(xiàn)[12]根據(jù)第一最優(yōu)電壓矢量作用下的電流誤差所在扇區(qū)確定第二最優(yōu)電壓矢量;文獻(xiàn)[13]在確定第一最優(yōu)電壓矢量之后,與其余有效電壓矢量、零矢量合成備選虛擬電壓矢量。
本文針對(duì)MPCC的3種算法進(jìn)行比較研究,首先介紹傳統(tǒng)MPCC、占空比MPCC以及三矢量MPCC 3種控制策略的控制原理,并從發(fā)出矢量個(gè)數(shù)、電壓矢量選擇范圍和矢量作用時(shí)間計(jì)算方法3個(gè)方面對(duì)3種方法進(jìn)行對(duì)比分析。最后,通過仿真驗(yàn)證3種方法的動(dòng)靜態(tài)性能,仿真結(jié)果表明多矢量MPCC與傳統(tǒng)MPCC具有相似的動(dòng)態(tài)性能,但能夠有效地改善傳統(tǒng)MPCC的穩(wěn)態(tài)性能,減小電流波動(dòng)。
1 傳統(tǒng)MPCC策略
1.1 PMSM數(shù)學(xué)模型
本文以表貼式PMSM為研究對(duì)象,忽略鐵心飽和、渦流和磁滯損耗,且d、q軸電感相等,有Ld=Lq=Ls,其在同步旋轉(zhuǎn)坐標(biāo)系下的電壓方程可表示為
(1)
式中:Rs為定子電阻;ωre為轉(zhuǎn)子電角速度;ψf為永磁體磁鏈;id和iq分別為定子電流d、q軸分量;ud和uq分別為定子電壓d、q軸分量。
1.2 傳統(tǒng)MPCC原理
將式(1)離散化得到預(yù)測(cè)模型,如式(2)~式(5)所示:
(2)

(3)
(4)
(5)
式中:Ts為采樣周期;ud(k)和uq(k)分別為k時(shí)刻的d、q軸電壓值;ωre(k)為k時(shí)刻的轉(zhuǎn)子電角速度。
兩電平三相電壓源逆變器(VSI)共有8種開關(guān)狀態(tài),包括6個(gè)有效電壓矢量(u1~u6)和2個(gè)零矢量(u0、u7)。將8個(gè)電壓矢量與當(dāng)前k時(shí)刻采樣得到的電流值id(k)、iq(k)依次代入預(yù)測(cè)模型式(2)預(yù)測(cè)k+1時(shí)刻的電流值id(k+1)、iq(k+1)。

(6)
因此,將id(k+1)、iq(k+1)代入價(jià)值函數(shù)式(6)計(jì)算出相應(yīng)的g值,并從中選出最小的g值,最后將使g值最小的電壓矢量作為最優(yōu)電壓矢量輸出。
2 多矢量MPCC策略
2.1 虛擬矢量的合成
與傳統(tǒng)單矢量MPCC存在較大的電流波動(dòng)相比,多矢量MPCC策略最終作為電流指令輸出的不再是VSI的8個(gè)基本電壓矢量,而是由其合成的虛擬電壓矢量,可減小電流波動(dòng)。占空比MPCC在單個(gè)采樣周期中,通過1個(gè)有效電壓矢量和1個(gè)零矢量合成1個(gè)方向固定、幅值可調(diào)的虛擬電壓矢量,如圖1(a)所示;三矢量MPCC在單個(gè)采樣周期中,通過2個(gè)有效電壓矢量的1個(gè)零矢量合成1個(gè)方向可調(diào)、幅值可調(diào)的虛擬電壓矢量,如圖1(b)所示。圖1中tm、tn為有效電壓矢量um、un的作用時(shí)間。
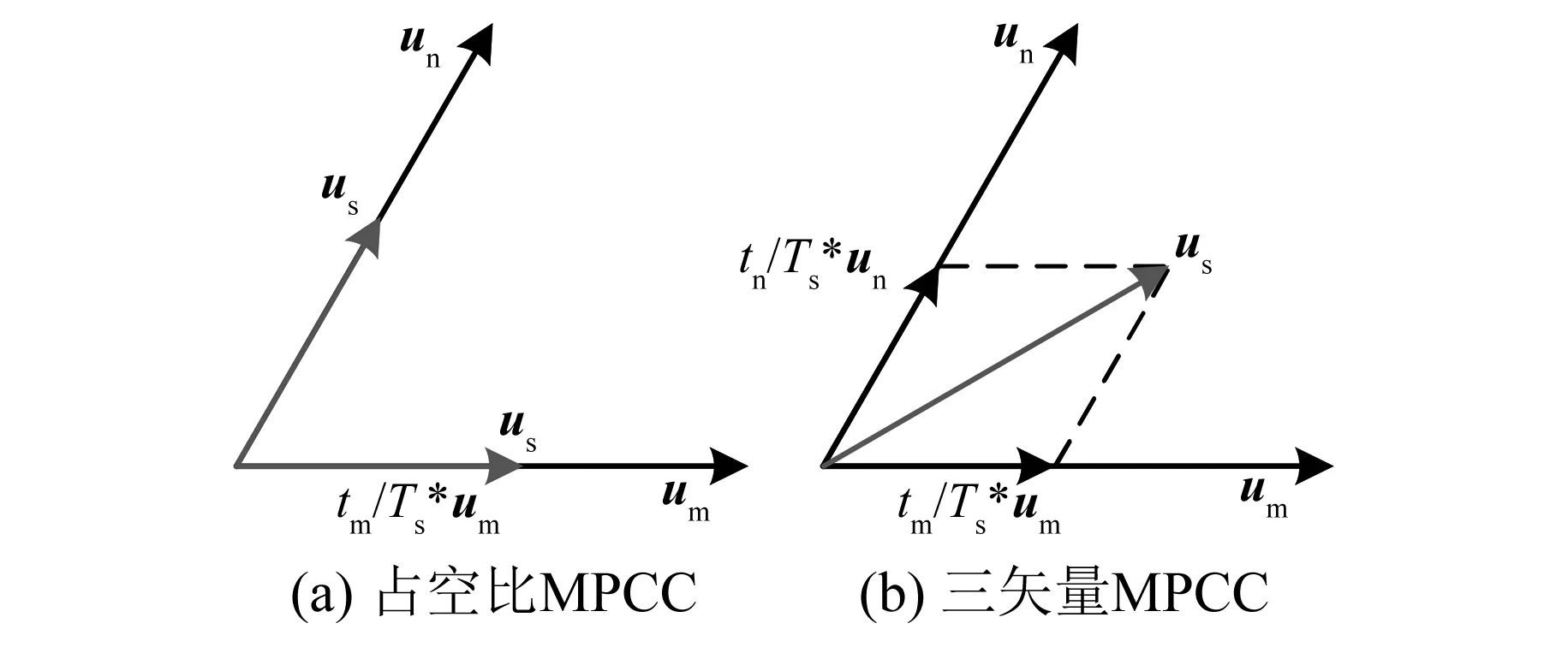
圖1 虛擬電壓矢量合成
根據(jù)式(1)可得,零矢量uzero與有效電壓矢量um、un作用時(shí)d、q軸電流變化率sdz、sqz、sdm、sqm、sdn、sqn分別為
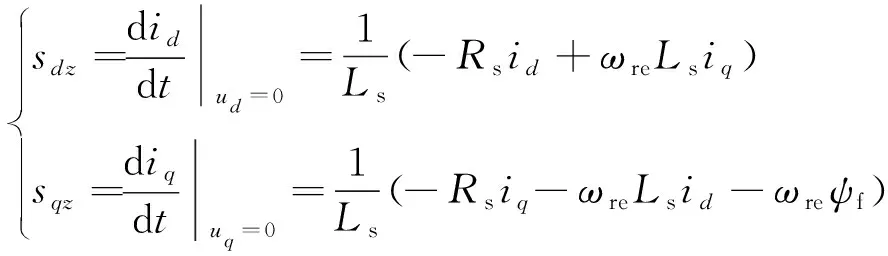
(7)
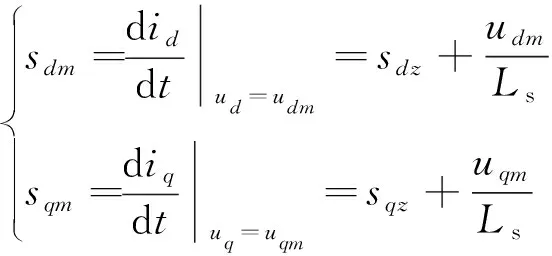
(8)
(9)
結(jié)合式(7)~式(9),占空比MPCC與三矢量MPCC中k+1時(shí)刻的id(k+1)、iq(k+1)為
iq(k+1)=iq(k)+sqmtm+sqz(Ts-tm)
(10)

(11)
2.2 占空比MPCC原理


(12)
將式(10)代入式(12),得um的作用時(shí)間tm為
(13)
uzero的作用時(shí)間tz為
tz=Ts-tm
(14)
作用時(shí)間確定之后,便可以預(yù)測(cè)id(k+1)、iq(k+1),在此過程中,考慮作用時(shí)間的因素,預(yù)測(cè)模型式(2)中的ud、uq應(yīng)改寫為虛擬電壓矢量對(duì)應(yīng)的dq軸分量:
(15)
然后,6組有效電壓矢量及其作用時(shí)間的組合可得到6個(gè)對(duì)應(yīng)的電流預(yù)測(cè)值,將6個(gè)電流預(yù)測(cè)值依次代入價(jià)值函數(shù)式(6),選出使g值最小的電壓矢量與其作用時(shí)間組合,并根據(jù)減少開關(guān)切換次數(shù)原則選擇零矢量,最終將該組合作為最優(yōu)輸出以控制VSI。
由上述原理可搭建占空比MPCC控制框圖,如圖2所示。
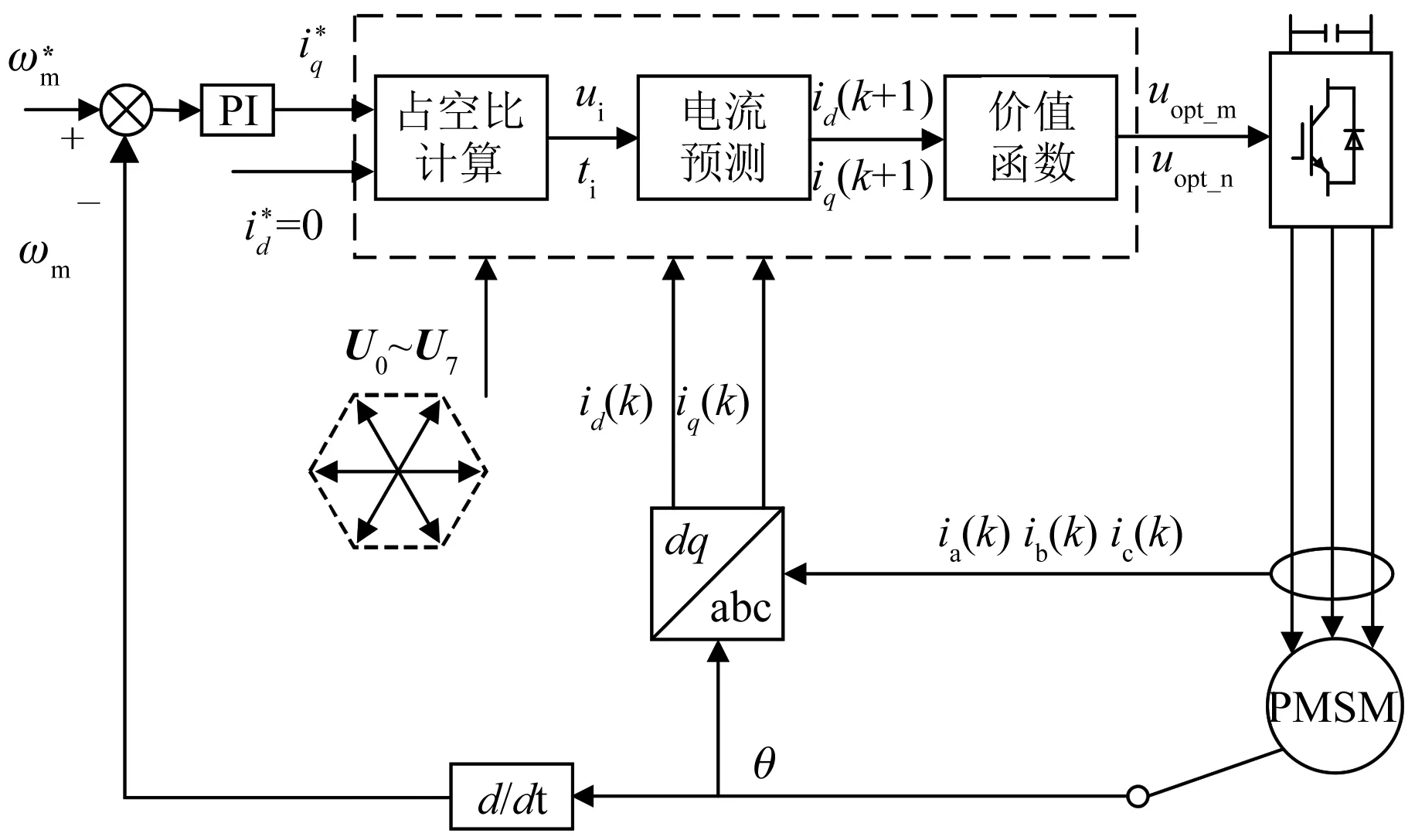
圖2 占空比MPCC控制框圖
2.3 三矢量MPCC原理
三矢量MPCC控制框圖如圖3所示。
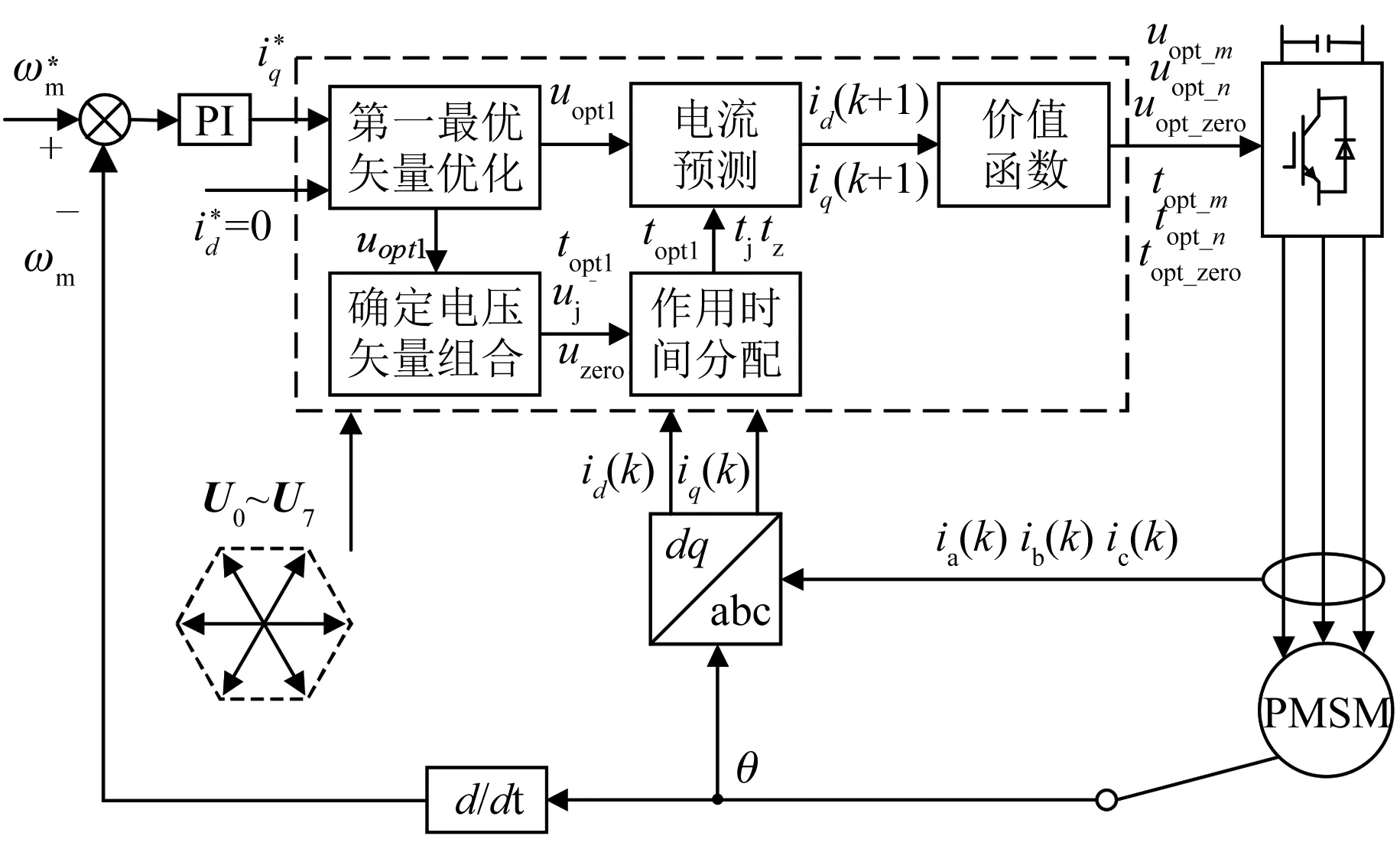
圖3 三矢量MPCC控制框圖
在6個(gè)有效電壓矢量中選出能夠使價(jià)值函數(shù)最小的電壓矢量作為三矢量MPCC策略中第1個(gè)有效電壓矢量uopt1,尋優(yōu)過程與傳統(tǒng)MPCC相同。然后,根據(jù)uopt1確定候選電壓矢量組合,選取原則為除了uopt1,其余有效電壓矢量均可作為第2個(gè)有效電壓矢量uj的候選矢量,uzero的選取遵循開關(guān)切換次數(shù)最少原則,矢量組合情況如表1所示。
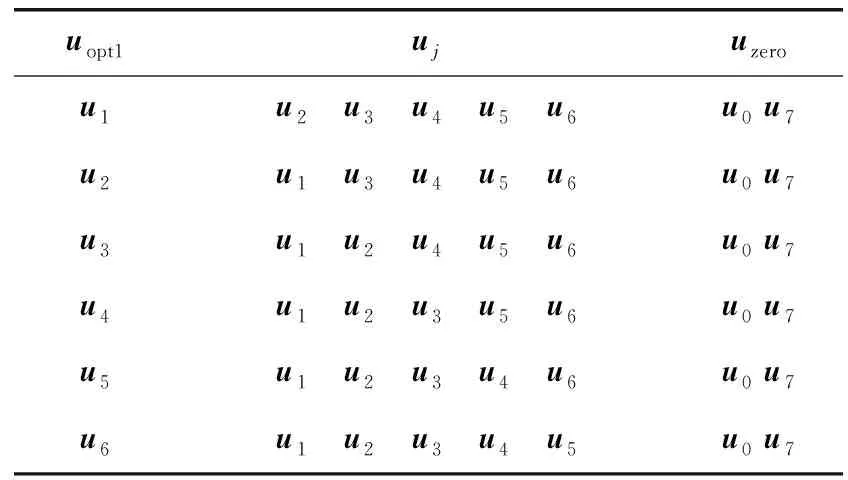
表1 三矢量MPCC候選電壓矢量組合表
根據(jù)dq軸電流無(wú)差拍原則確定候選電壓矢量組合中各個(gè)電壓矢量的作用時(shí)間,有:
(16)
結(jié)合式(11),可得uopt1、uj與uzero的作用時(shí)間topt1、tj、tz分別為
(sdz-sdj)+Ts(sqzsdj-sqjsdz)}
(17)
(sdopt1-sdz)+Ts(sqopt1sdz-sqzsdopt1)}
(18)
tz=Ts-topt1-tj
(19)
且有:
D=sqzsdj+sqopt1sdz+sqjsdopt1-sqopt1sdj-
sqjsdz-sqzsdopt1
(20)
則對(duì)應(yīng)的虛擬電壓矢量的dq軸分量為
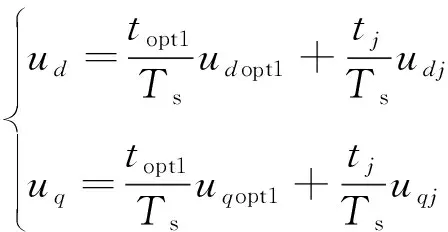
(21)
最后將5個(gè)虛擬電壓矢量依次代入預(yù)測(cè)模型式(2)中,得到id(k+1)、iq(k+1),根據(jù)價(jià)值函數(shù)式(6)選出使g值最小的虛擬電壓矢量作為輸出以控制VSI。
3 3種控制策略的比較
根據(jù)上述3種控制策略的控制原理,從3個(gè)方面分析其差異性:發(fā)出矢量個(gè)數(shù)、電壓矢量選擇范圍和矢量作用時(shí)間計(jì)算方法,如表2所示。
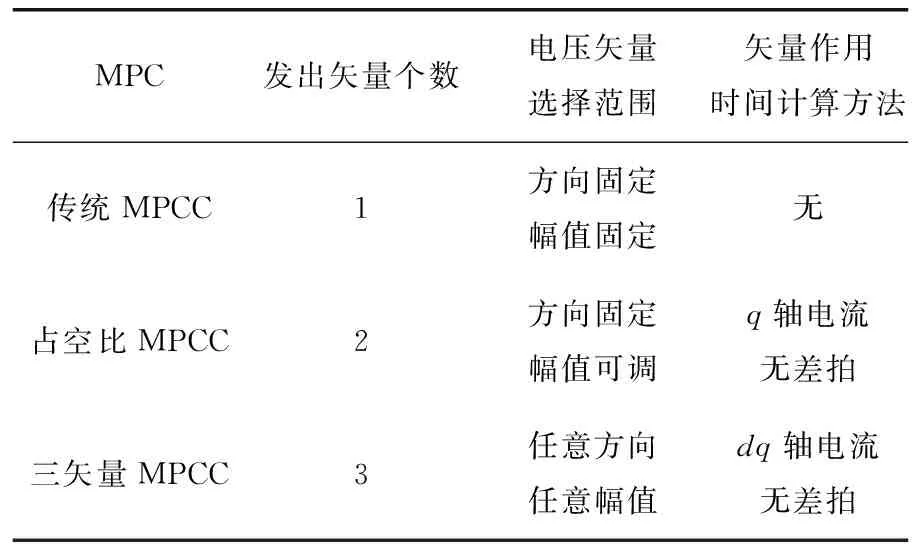
表2 控制策略差異表
3種MPCC最明顯的差異就是單個(gè)采樣周期輸出的電壓矢量個(gè)數(shù)不同。通過增加輸出矢量個(gè)數(shù)擴(kuò)大了電壓矢量的選擇范圍,傳統(tǒng)MPCC、占空比MPCC與三矢量MPCC的電壓矢量選擇范圍如圖4所示。傳統(tǒng)MPCC的備選電壓矢量是固定的基本電壓矢量;占空比MPCC可選擇的電壓矢量幅值可調(diào),但方向仍固定在基本電壓矢量上;三矢量MPCC通過2個(gè)有效電壓矢量與1個(gè)零矢量合成1個(gè)虛擬電壓矢量,可使電壓矢量的選擇范圍覆蓋到任意幅值和任意方向。
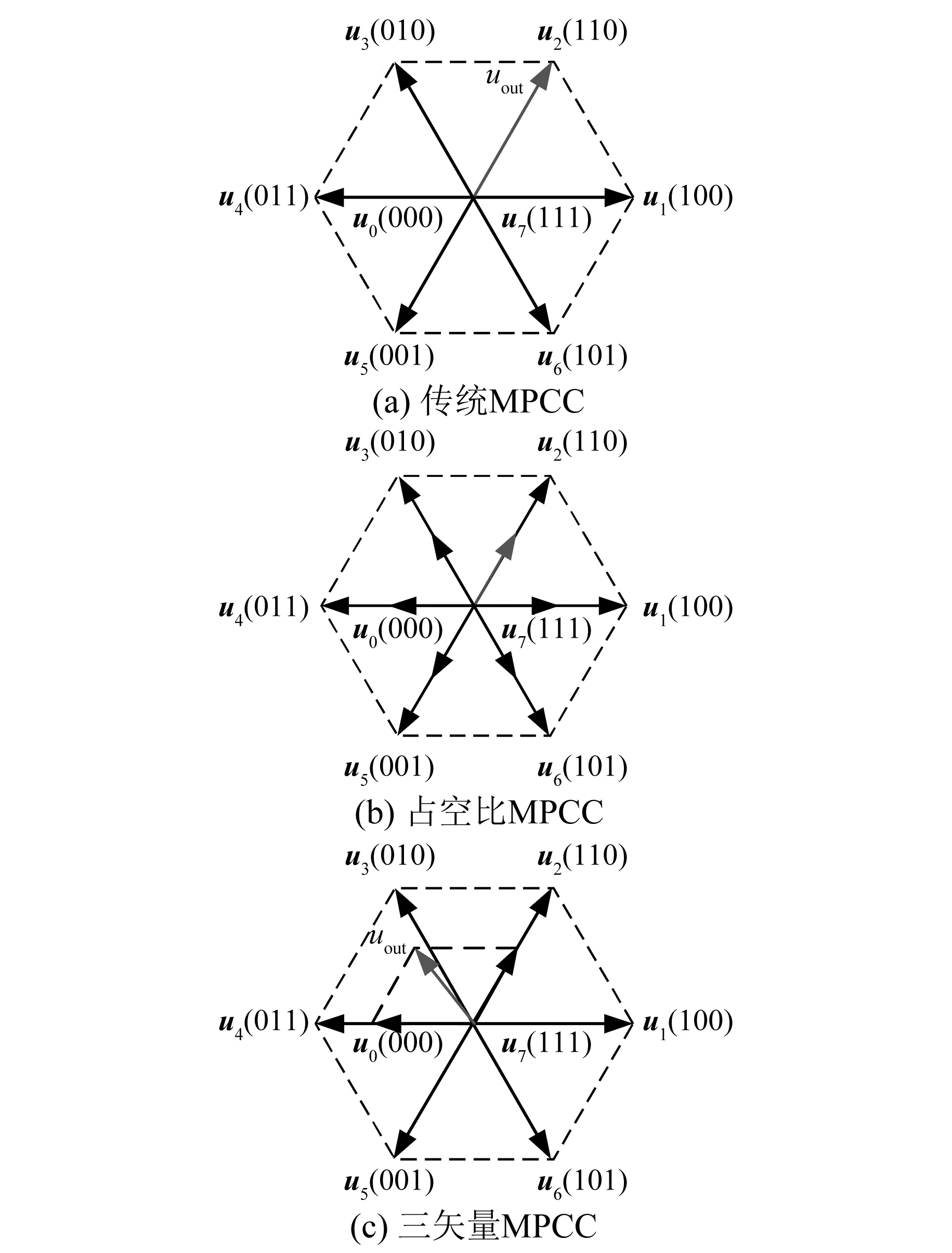
圖4 電壓矢量選擇范圍
最后,在傳統(tǒng)MPCC中,尋優(yōu)得到的最優(yōu)電壓矢量作用一整個(gè)采樣周期,不存在矢量作用時(shí)間的計(jì)算方法;在占空比MPCC中,通過分配有效電壓矢量與零矢量的作用時(shí)間,實(shí)現(xiàn)了q軸電流無(wú)差拍;在三矢量MPCC中則同時(shí)實(shí)現(xiàn)了對(duì)dq軸電流的無(wú)差拍控制。
4 仿真驗(yàn)證
在MATLAB/Simulink環(huán)境中搭建PMSM的傳統(tǒng)MPCC、占空比MPCC及三矢量MPCC模型并進(jìn)行對(duì)比仿真,電機(jī)參數(shù)如表3所示,采樣頻率均為20 kHz,且均采用相同的PI參數(shù)(KP=0.2,KI=10)。
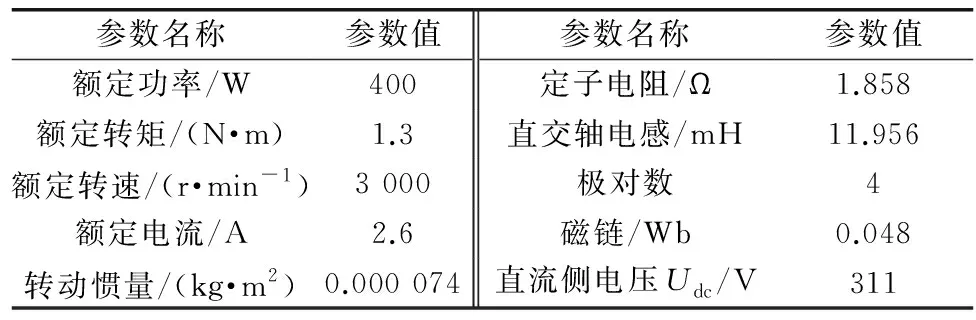
表3 永磁同步電機(jī)仿真參數(shù)
4.1 靜態(tài)運(yùn)行特性
穩(wěn)態(tài)運(yùn)行仿真工況為,轉(zhuǎn)速300 r/min,負(fù)載0.6 N·m。電機(jī)轉(zhuǎn)速n與a相電流ia波形如圖5所示。與占空比MPCC、三矢量MPCC相比,傳統(tǒng)MPCC的轉(zhuǎn)速波形存在較大的抖振,且a相電流波形諧波較大。對(duì)傳統(tǒng)MPCC、占空比MPCC、三矢量MPCC的a相電流做FFT分析,其頻譜圖如圖6所示。其中傳統(tǒng)MPCC中THD=15.19%,占空比MPCC中THD=2.93%,三矢量MPCC中THD=2.81%。因此可以看出,與傳統(tǒng)MPCC相比,多矢量MPCC可以有效改善系統(tǒng)的穩(wěn)態(tài)性能,減小電流諧波。
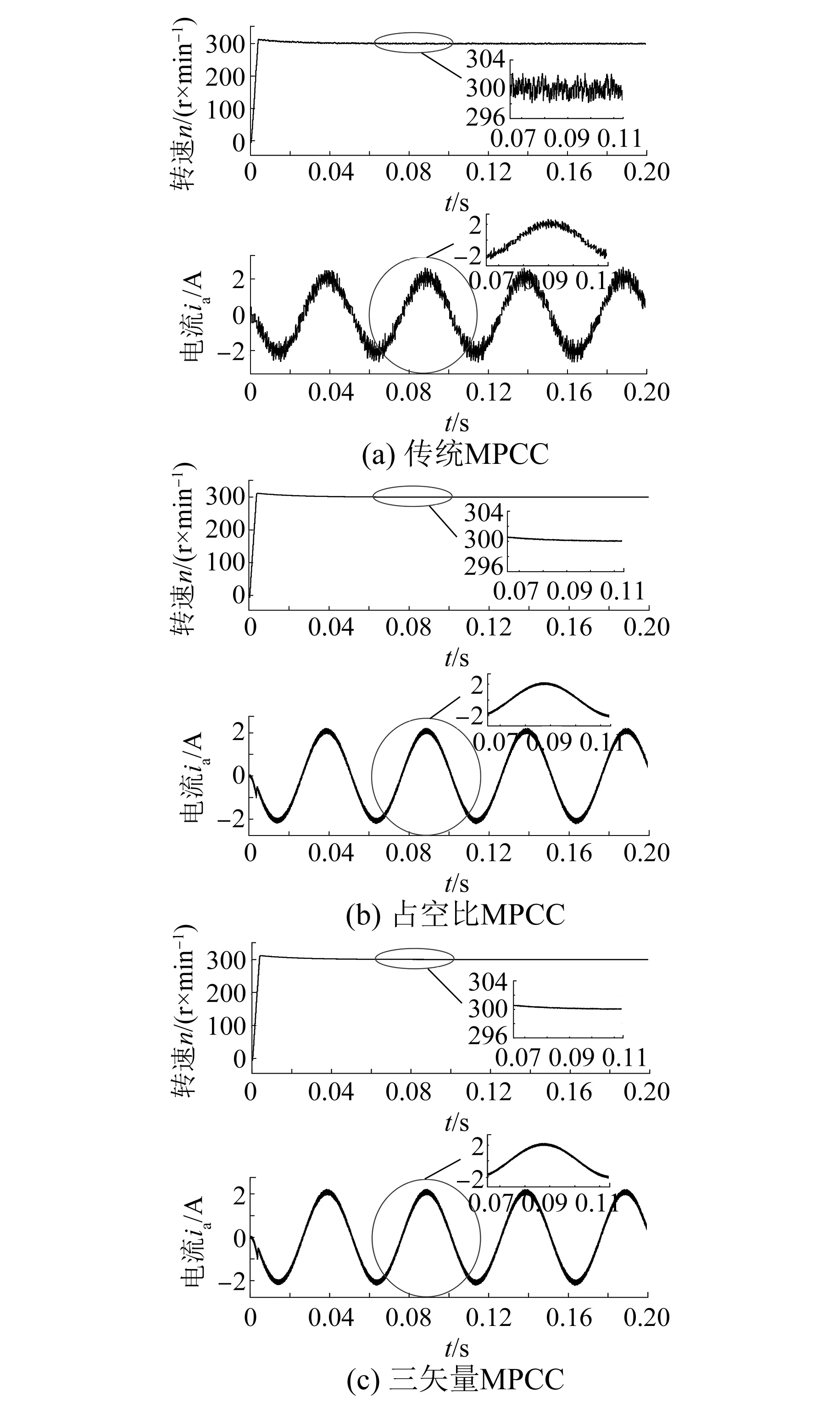
圖5 穩(wěn)態(tài)運(yùn)行下轉(zhuǎn)速與相電流波形圖
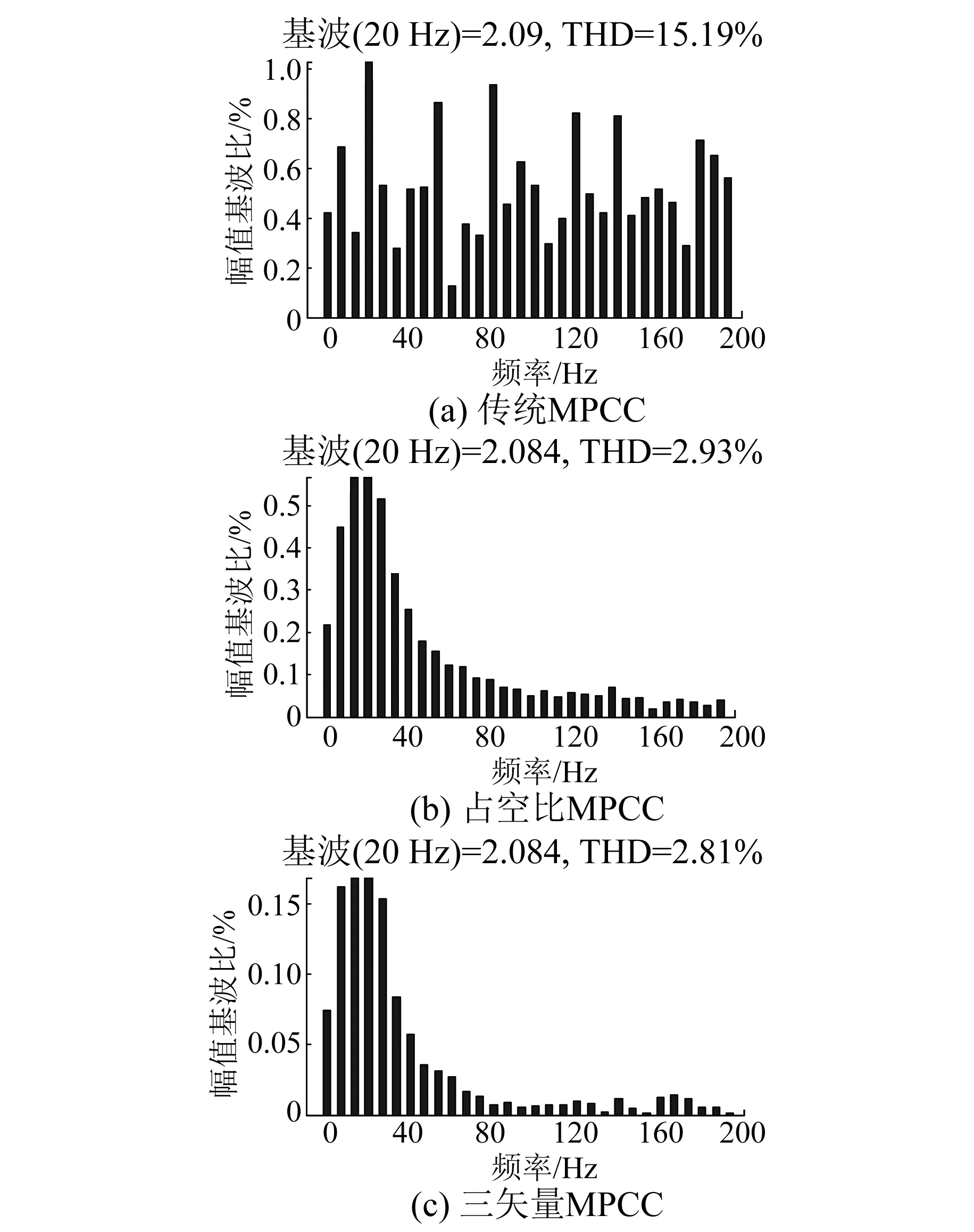
圖6 FFT分析頻譜圖
4.2 動(dòng)態(tài)運(yùn)行特性
圖7為電機(jī)給定轉(zhuǎn)速1 500 r/min,帶0.6 N·m負(fù)載起動(dòng),0.2 s突加負(fù)載至1.2 N·m時(shí)3種控制方法的動(dòng)態(tài)響應(yīng)圖。由圖7可知,在發(fā)生負(fù)載突變時(shí),3種控制策略的轉(zhuǎn)速均有小幅下降,但均能快速跟隨上給定轉(zhuǎn)速。
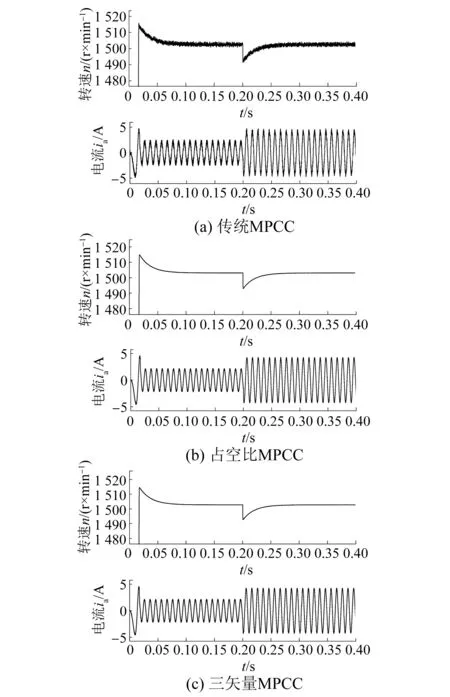
圖7 負(fù)載突變狀態(tài)下轉(zhuǎn)速與相電流波形圖
圖8為3種控制策略下,電機(jī)帶0.6 N·m負(fù)載,0.2 s轉(zhuǎn)速突變的電流跟蹤情況。由圖8可以看出,轉(zhuǎn)速由500 r/min加速到1 500 r/min時(shí),3種控制策略均有較快的電流響應(yīng)速度,均能夠?qū)崿F(xiàn)轉(zhuǎn)速的快速跟蹤。
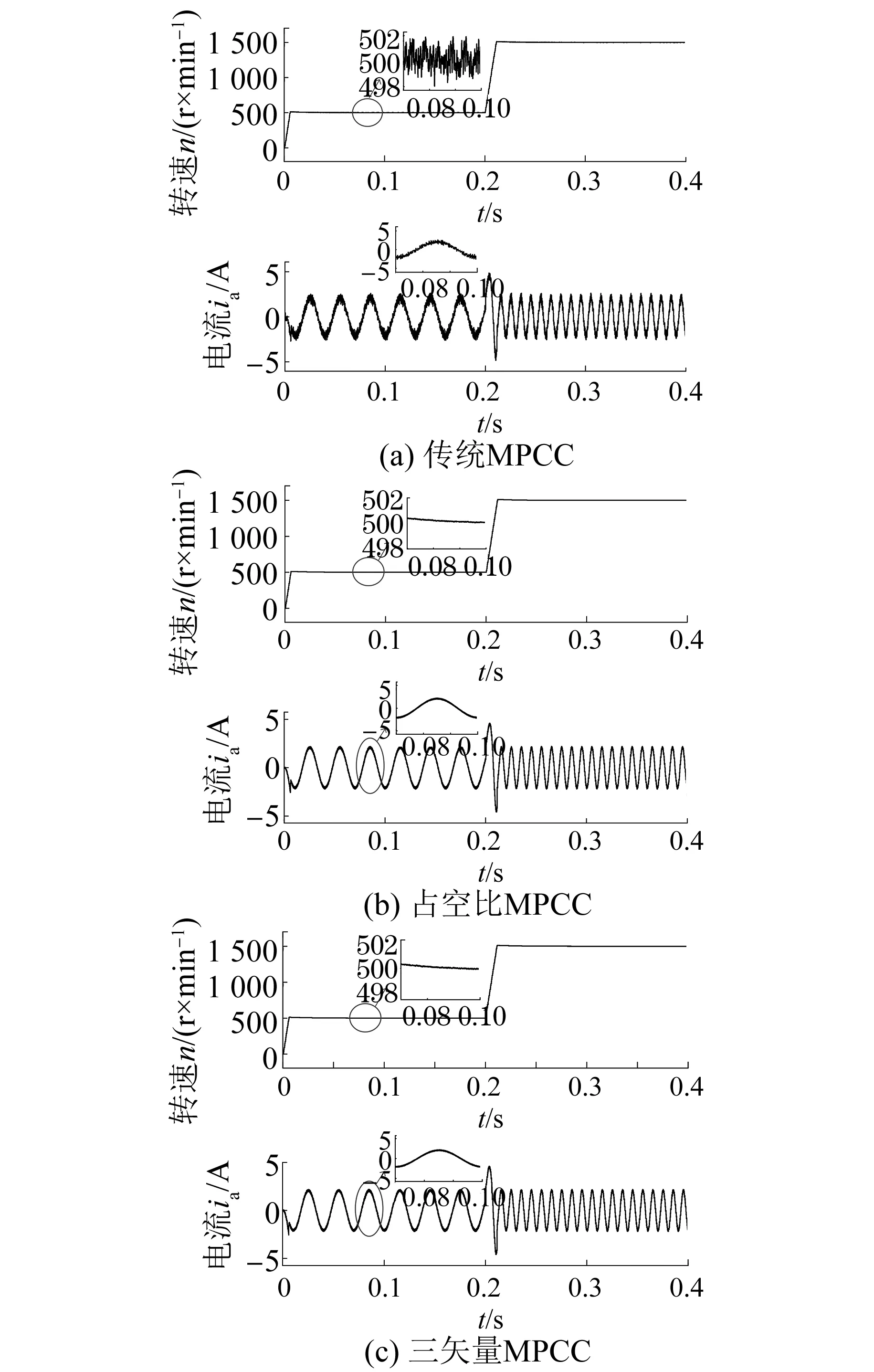
圖8 轉(zhuǎn)速突變狀態(tài)下轉(zhuǎn)速與相電流波形圖
從上述仿真結(jié)果可以看出,無(wú)論是轉(zhuǎn)速階躍還是突加負(fù)載,3種控制策略均能達(dá)到快速響應(yīng),但多矢量MPCC與傳統(tǒng)MPCC相比具有更小的轉(zhuǎn)速與電流波動(dòng),與穩(wěn)態(tài)運(yùn)行結(jié)果相符。由此可以說(shuō)明多矢量MPCC不僅改善了系統(tǒng)的穩(wěn)態(tài)性能,還保持了良好的系統(tǒng)動(dòng)態(tài)響應(yīng)性能。
5 結(jié) 語(yǔ)
本文針對(duì)兩電平三相電壓源逆變器供電的永磁同步電機(jī)的3種MPCC策略,進(jìn)行了比較研究。介紹了3種控制方案的控制原理,并分析了三者的差異性,與單矢量MPCC相比,多矢量MPCC在單個(gè)周期發(fā)出多個(gè)電壓矢量,擴(kuò)大了電壓矢量選擇范圍,可實(shí)現(xiàn)d、q軸電流的無(wú)差拍控制。最后通過仿真對(duì)比分析三者的動(dòng)靜態(tài)性能。結(jié)果表明,多矢量MPCC明顯減小了單矢量MPCC中的電流脈動(dòng),提高了穩(wěn)態(tài)性能,同時(shí)能夠保持良好快速的動(dòng)態(tài)響應(yīng)性能。本文針對(duì)不同MPCC策略進(jìn)行的比較研究為后續(xù)進(jìn)行實(shí)物試驗(yàn)驗(yàn)證做了準(zhǔn)備工作,奠定了基礎(chǔ)。
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36
