PMLSM動子位置估算與校正策略研究*
2021-11-22 04:25:58黨存祿陳文德
電機與控制應(yīng)用 2021年10期
黨存祿, 陳文德
(1.蘭州理工大學(xué) 電氣工程與信息工程學(xué)院,甘肅 蘭州 730050;2.蘭州理工大學(xué) 甘肅省工業(yè)過程先進(jìn)控制重點實驗室,甘肅 蘭州 730050;3.蘭州理工大學(xué) 電氣與控制工程國家級實驗教學(xué)示范中心,甘肅 蘭州 730050)
0 引 言
永磁直線同步電機(PMLSM)因為其獨特的物理結(jié)構(gòu),不需要中間轉(zhuǎn)換結(jié)構(gòu)就能將電能轉(zhuǎn)化為使電機做直線運動的機械能,實現(xiàn)了無需任何傳動機構(gòu)的“零傳動”,克服了由中間轉(zhuǎn)換結(jié)構(gòu)帶來的不利因素,因此在一些精密加工、儀器儀表業(yè)、電子裝配線等領(lǐng)域得到了廣泛的應(yīng)用。在PMLSM的控制系統(tǒng)中,控制方案大都需要測量動子的速度和位置信息。目前,PMLSM伺服控制中廣泛使用光柵尺作為位置傳感器。但是光柵尺不僅安裝成本高,后期的維護(hù)與檢修同樣也會增加運行成本。除此之外,也會增加PMLSM的空間尺寸。在某些特定的環(huán)境中,并沒有空間安裝光柵尺等大尺寸的傳感器[1]。
以上文獻(xiàn)雖然使用了不同的無傳感器技術(shù),但是對于位置估算均是利用速度積分,存在偏差累積問題。對此,本文建立了PMLSM速度、電流雙閉環(huán)矢量控制模型,并且以滑模觀測器為例,仿真驗證了無傳感器技術(shù)的速度誤差與由此帶來的位置估算誤差,并且從應(yīng)用角度提出了一種新的低成本且高精度PMLSM位置校正策略,仿真驗證了其校正效果。
1 PMLSM數(shù)學(xué)模型
在建立PMLSM的模型數(shù)學(xué)之前,先做如下假設(shè):
(1) 忽略PMSLM中磁路飽和影響;
(2) 不考慮PMSLM中鐵心的磁滯現(xiàn)象及渦流損耗;
(3) 不考慮PMLSM的端部效應(yīng)影響;
(4) 定子電動勢以正弦規(guī)律變化,不考慮 PMLSM中高次諧波的影響。
以上述假設(shè)為前提,PMLSM在dq坐標(biāo)系下的非線性數(shù)學(xué)模型描述如下:
電壓方程:
(1)
式中:ud、uq分別為d、q軸電壓;Rs為定子繞組電阻;id、iq分別為d、q軸電流;ψd、ψq分別為d、q軸磁鏈;ω為電機電角速度。
磁鏈方程:
(2)
式中:ψpm為永磁體磁鏈;Ld為d軸同步電感;Lq為q軸同步電感。
推力方程:

(3)
式中:τ為電機極距;ψpm為永磁體磁鏈;p為電樞極對數(shù)。
對于表貼式PMLSM,Ld=Lq,本文研究表貼式PMLSM,因此式(3)簡化為
(4)
機械方程:

(5)
式中:Fe為電磁推力;Mn為動子質(zhì)量;Bn為黏滯摩擦力系數(shù);v為動子速度且有v=ωτ/π;Fd為負(fù)載。
2 滑模觀測器
滑模變結(jié)構(gòu)觀測器與其他方法最大的差異在于系統(tǒng)是動態(tài)變化的,根據(jù)系統(tǒng)當(dāng)前的狀態(tài),迫使系統(tǒng)按照預(yù)定的“滑動模態(tài)”的狀態(tài)軌跡運動。
為方便建立PMLSM的滑模觀測器,需要將PMLSMdq坐標(biāo)系模型通過2r-2s變換到αβ坐標(biāo)系。 該坐標(biāo)系下電壓方程如下:

(6)
Eα、Eβ滿足:

(7)
為便于應(yīng)用滑模觀測器觀測反電動勢,將式(6)改寫為電流狀態(tài)方程:

(8)
式中:
(9)
為獲得反電動勢估計值,設(shè)計滑模觀測器如下:
(10)

將式(10)和式(9)作差,可得電流誤差方程為
(11)

設(shè)計滑模控制率為

(12)

(13)
由于實際控制量是不連續(xù)的高頻信號,為提取反電動勢估計值,需要外加一個低通濾波器。
經(jīng)過濾波以后對于電角速度則有:
(14)
PMLSM的線速度則有:
(15)
3 動子位置估算與校正
目前PMLSM無傳感器控制系統(tǒng)主要是利用對速度積分估算動子位置。但是由于速度源自于無傳感器技術(shù),與電機實際速度之間仍然存在微小的誤差。對該速度信號積分勢必會造成動子位置計算誤差。隨著電機連續(xù)運行,偏差量也會累積。而且僅開環(huán)計算,也無法保證位置估算結(jié)果與實際位置的誤差收斂,甚至?xí)l(fā)散,導(dǎo)致基于無傳感器控制的位置伺服系統(tǒng)失去意義,限制了無傳感器技術(shù)在PMLSM上的應(yīng)用。
針對這一現(xiàn)狀,本文提出一種低成本高精度的校正策略,如圖1所示。在定子側(cè),動子高頻經(jīng)過位置固定一枚高采樣頻率的光電式傳感器并記錄其安裝位置B,當(dāng)動子上的位置參考點與傳感器位置重合時,該傳感器動作,DSP或者其他控制器接收到外部中斷,將此時的估算位置與傳感器坐標(biāo)B作差,并且將偏差量注入到位置估算結(jié)果中,實現(xiàn)了對于估算位置的校正。隨著電機的連續(xù)運行,動子每一次經(jīng)過該位置,估算位置就會被校正一次,提高了無傳感器位置估算結(jié)果的精度,有效地避免了由于偏差累積而導(dǎo)致無傳感器系統(tǒng)崩潰的風(fēng)險。

圖1 動子位置校正
位置估算為
(16)

當(dāng)動子到達(dá)傳感器位置B時:

(17)
式中:t為動子到達(dá)B位置時,DSP或控制器收到傳感器中斷信號的時間。

(18)
式中:Δx為動子到達(dá)傳感器位置時,無傳感器技術(shù)估算位置與位置B的誤差。
校正后的估算位置:

(19)

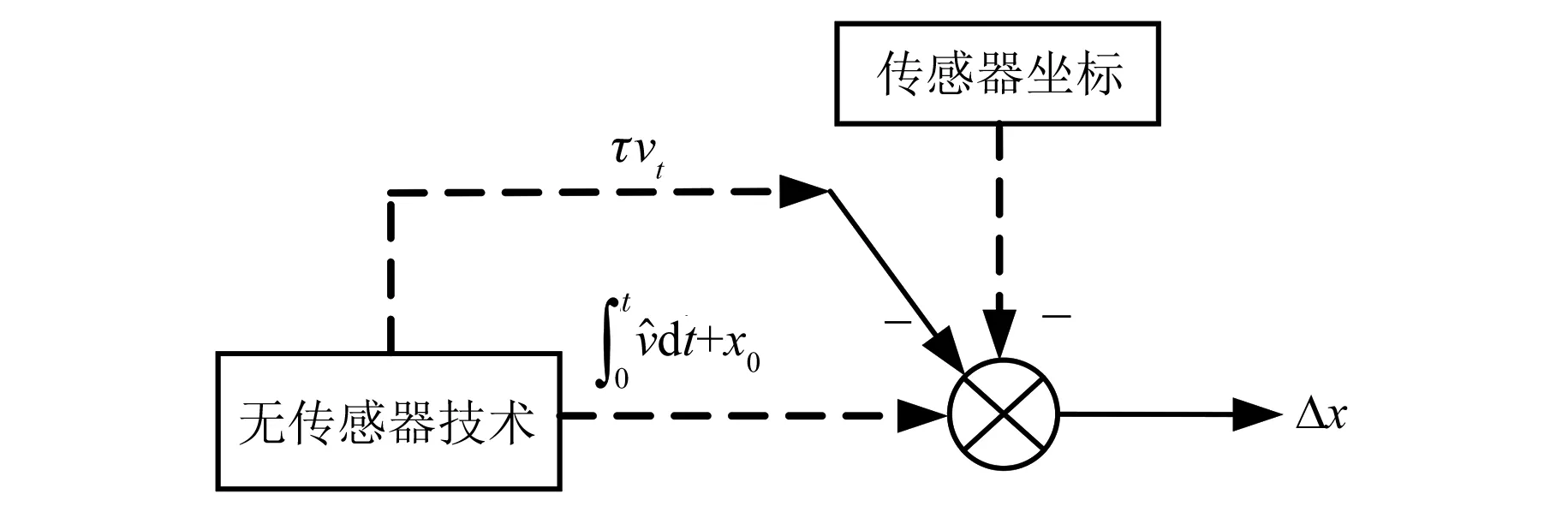
圖2 誤差計算
(20)
式中:vt為DSP接收到外部中斷的瞬間無傳感器技術(shù)觀測到的速度;τ為傳感器響應(yīng)時間。

(21)
通過式(21)對二者位置偏差計算,并且將偏差注入到估算結(jié)果:
(22)
由此實現(xiàn)了PMLSM位置的校正,提高了PMLSM位置估算結(jié)果的精度,避免了估算結(jié)果與實際位置之間發(fā)散導(dǎo)致伺服系統(tǒng)崩潰的風(fēng)險。該位置校正策略,為無傳感器技術(shù)在PMLSM位置伺服系統(tǒng)的使用提供了保障。雖然增加了一枚“坐標(biāo)”傳感器,但是成本與體積比常用的光柵尺而言具有極強的優(yōu)勢,尤其是對于長定子PMLSM或者精度要求不太高的場景具有重要意義。
4 系統(tǒng)MATLAB仿真
在MATLAB/Simulink中搭建PMLSM速度、電流雙閉環(huán)矢量控制系統(tǒng)與滑模觀測器,如圖3所示。PMLSM模型參數(shù)為,Rs=2.65 Ω、Ld=Lq=26.7 mH、ψpm=0.303 1 Wb、τ=0.016 m、Mn=28 kg、Bn=4 N·s·m-1。
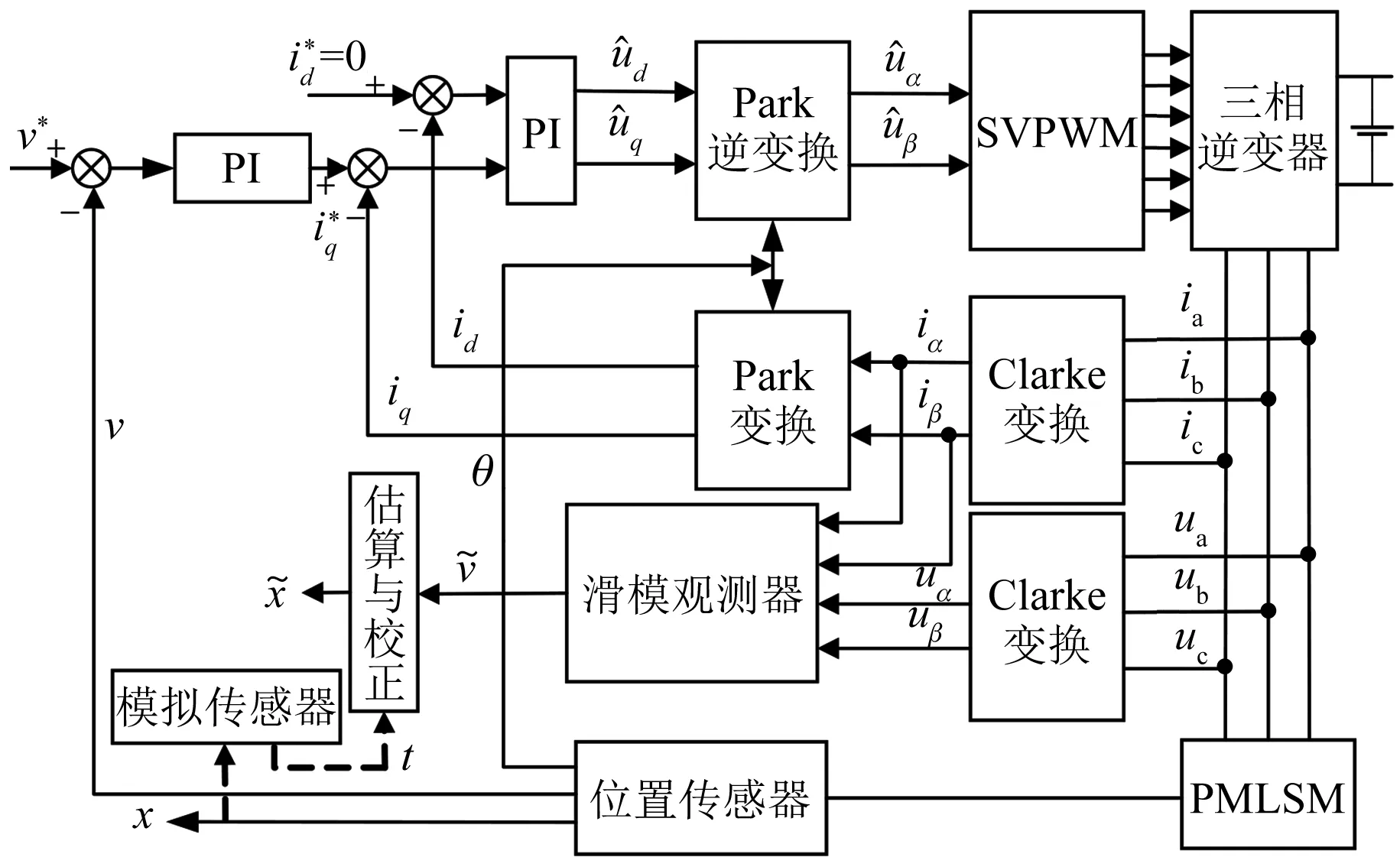
圖3 PMLSM控制系統(tǒng)
仿真條件為直流側(cè)電壓Udc=311 V,SVPWM開關(guān)頻率為10 kHz,電機初始位置為0 m。初始時刻給定速度為0.6 m/s,達(dá)到給定速度后,在0.5 s時,給定階躍為0.8 m/s,研究該連續(xù)變速運動過程中估算位置與實際位置的偏差。假設(shè)在定子側(cè)0.5 m處安裝前文所述的傳感器,仿真中通過在電機實際位置到達(dá)0.5 m時,觸發(fā)校正系統(tǒng),實現(xiàn)對于傳感器的模擬。根據(jù)傳感器坐標(biāo)與該時刻的無傳感器技術(shù)估算位置求取偏差并且對位置估算結(jié)果進(jìn)行校正,實現(xiàn)了基于傳感器的校正系統(tǒng)仿真模擬,并且驗證了校正效果。
圖4為電機實際速度,圖5為滑模觀測器的觀測速度,圖6為二者的速度誤差,雖然很小,但是對于位置估算而言,不能忽略。
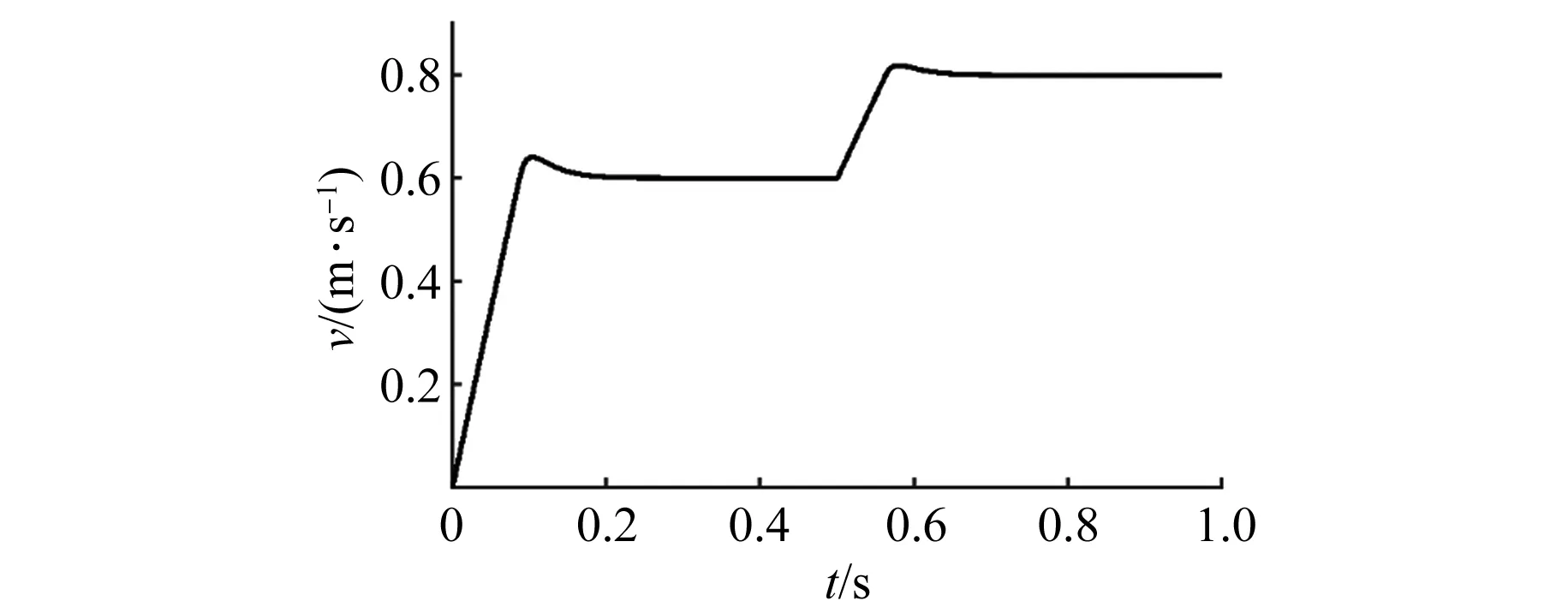
圖4 電機速度
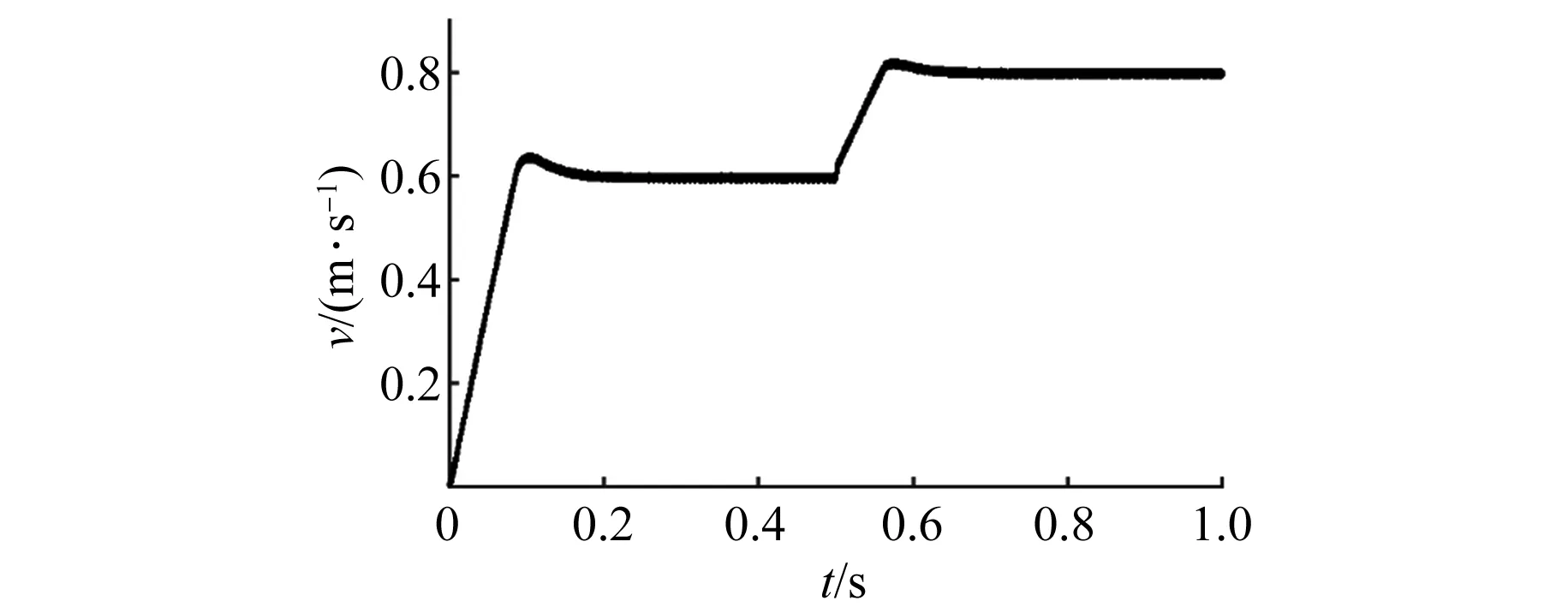
圖5 滑模觀測器速度
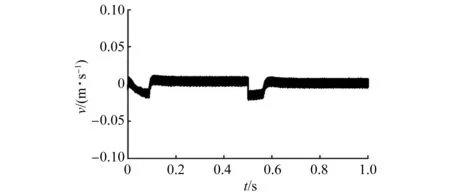
圖6 滑模觀測器的速度誤差
圖7為未校正的動子實際位置與滑模觀測器估算位置,可以看出隨著電機的連續(xù)運行,由于速度誤差的影響,二者之間的位置誤差累積,使得PMLSM位置伺服系統(tǒng)性能下降。圖8為采用了該校正策略后的結(jié)果,在動子到達(dá)0.5 m處,觸發(fā)了校正系統(tǒng),求得偏差量并且注入估算結(jié)果中,實現(xiàn)了動子位置校正,清除了在此之前積累的歷史偏差。提高了估算結(jié)果的精度,也避免了偏差累積造成控制系統(tǒng)崩潰的風(fēng)險。
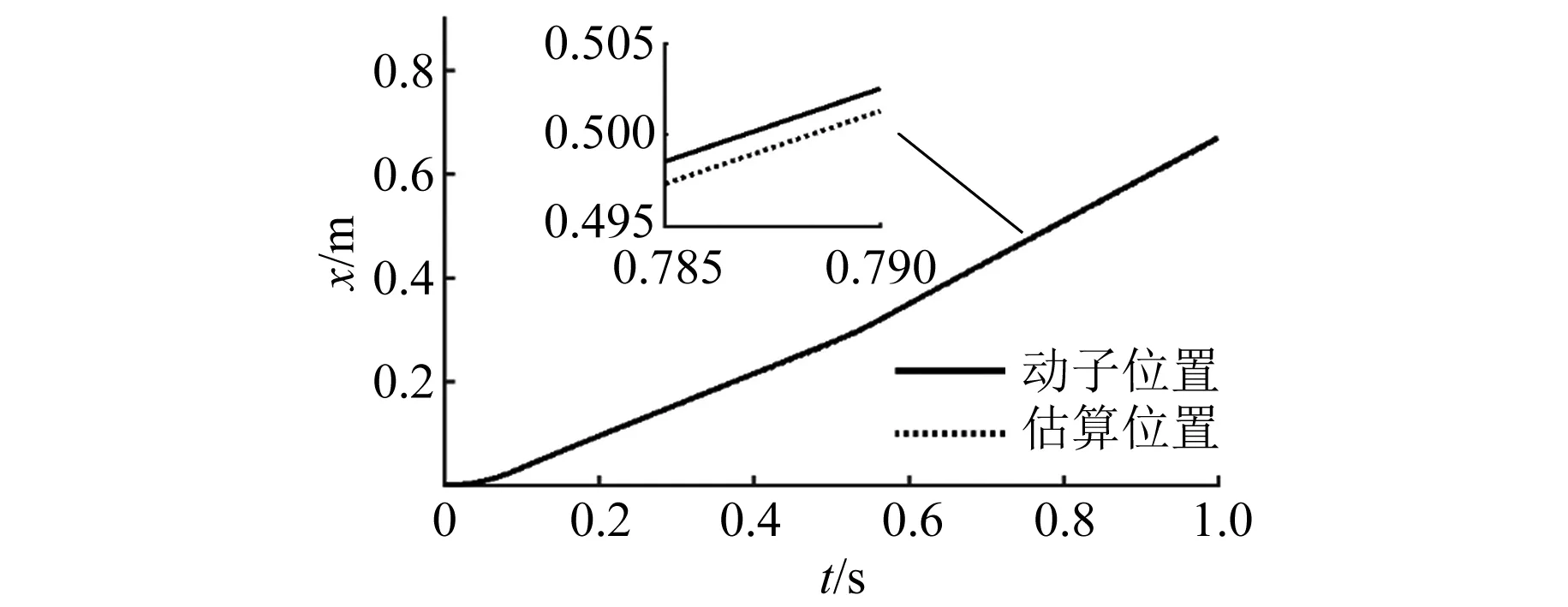
圖7 無校正的動子位置與估算位置
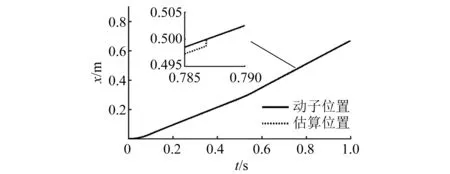
圖8 校正后動子位置與估算位置
圖9為無校正系統(tǒng)的位置估算誤差與校正后的位置估算誤差對比。可以看出,隨著電機連續(xù)運行,無校正系統(tǒng)的位置估算誤差開始發(fā)散,導(dǎo)致位置估算結(jié)果的精度下降。在0.5 m處觸發(fā)校正系統(tǒng)后,清除了之前積累的偏差,與無校正系統(tǒng)的位置估算誤差相比,校正后誤差更小,大幅度提升了位置估算結(jié)果的精度。
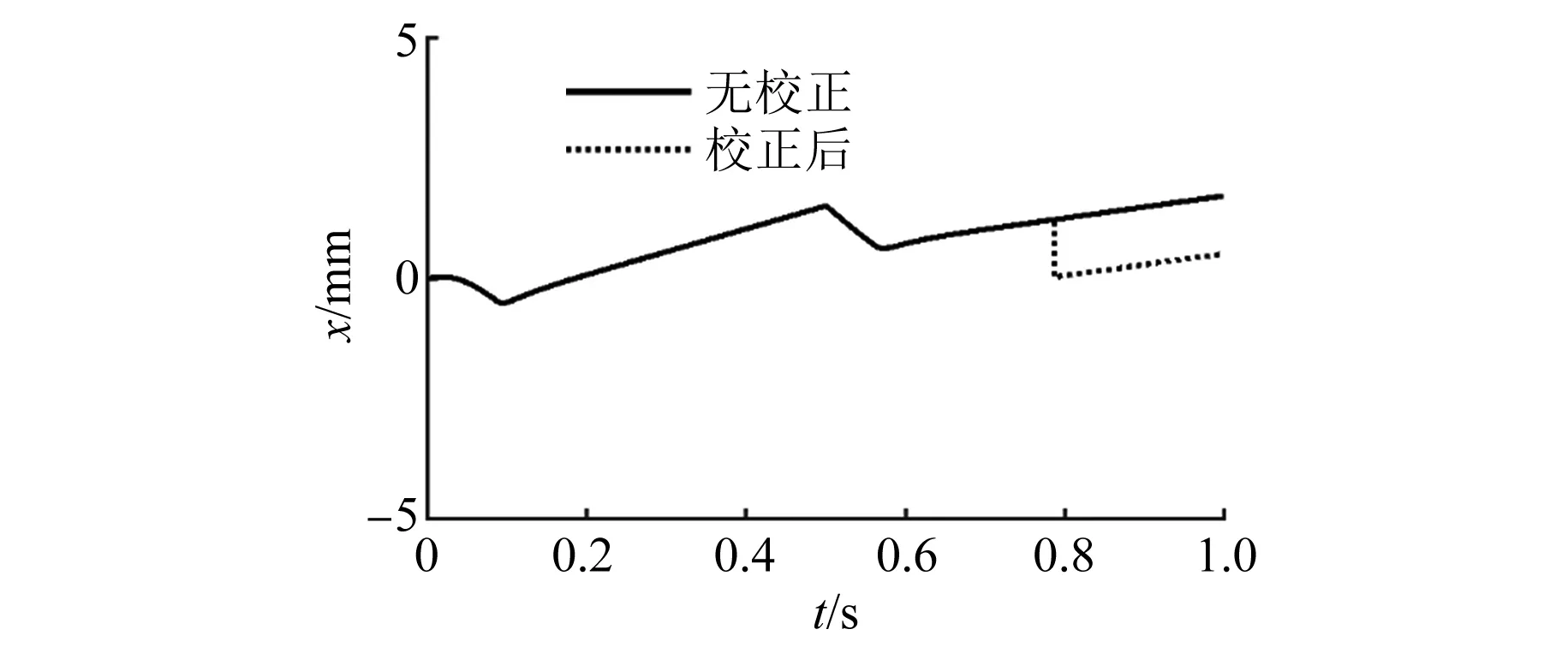
圖9 無校正與校正后位置估算誤差
5 結(jié) 語
由于目前的PMLSM無傳感器控制系統(tǒng)主要是通過速度積分估算動子位置。但是該速度與實際速度之間仍存在誤差,積分會造成偏差量的累積,而且是開環(huán)計算,本身不具備校正能力。本文提出在PMLSM無傳感器控制系統(tǒng)的定子側(cè)動子高頻經(jīng)過的位置安裝一枚傳感器,實現(xiàn)類似“行程開關(guān)”的功能,每一次動子到達(dá)該位置時,都能觸發(fā)校正系統(tǒng),清除歷史偏差,提升了位置估算系統(tǒng)精度的同時,也保證了控制系統(tǒng)不會因為位置估算誤差發(fā)散而使控制系統(tǒng)崩潰。與傳統(tǒng)光柵尺等傳感器相比,成本低、體積小、質(zhì)量輕,為一些精度要求不高的位置伺服系統(tǒng)和長定子PMLSM提供了更具性價比的選擇。
