基于3D成像和激光輪廓傳感技術(shù)的共享汽車非事故損傷檢測(cè)系統(tǒng)設(shè)計(jì)與應(yīng)用
2021-11-27 22:18:31顧赫李泓宣楊佳男王怡馮美寧
機(jī)電信息 2021年28期
顧赫 李泓宣 楊佳男 王怡 馮美寧
摘 要:繼共享打車、共享單車后,節(jié)能環(huán)保的共享汽車應(yīng)運(yùn)而生。在擁有便利性的同時(shí),共享汽車在自助歸還模式下如發(fā)生非事故損傷,因無法正確得到車輛實(shí)時(shí)信息,將導(dǎo)致無法或錯(cuò)誤追責(zé)等后果。鑒于此,設(shè)計(jì)了共享汽車非事故損傷檢測(cè)系統(tǒng),通過激光輪廓傳感器和高清攝像頭測(cè)量得到汽車輪廓、車漆及內(nèi)飾的圖像信息,基于整體與局部的圖像對(duì)比識(shí)別技術(shù)判斷車輛是否存在損壞。該系統(tǒng)可代替人工檢測(cè),解決人工檢測(cè)還車花費(fèi)時(shí)長(zhǎng)的問題,簡(jiǎn)化還車步驟,并提高準(zhǔn)確度、節(jié)省時(shí)間,以適應(yīng)快節(jié)奏的社會(huì)現(xiàn)狀。
關(guān)鍵詞:共享汽車;非事故損傷;線激光輪廓掃描技術(shù);3D圖像合成;對(duì)比定損
1? ? 研究背景
共享汽車起源于歐洲,由于其對(duì)減緩交通堵塞,減少大氣污染,改善城市環(huán)境有所貢獻(xiàn),故世界上其他國(guó)家如美國(guó)等也在發(fā)展共享汽車服務(wù)。20世紀(jì)80年代末,瑞士首先出現(xiàn)了通過商業(yè)性組織向有車或無車者提供汽車共享的服務(wù),隨后這種服務(wù)在歐洲、北美、亞洲等地快速發(fā)展[1]。
如今,用戶通過手機(jī)便可自助預(yù)定共享汽車,并進(jìn)行選擇、付款、還車等一系列操作,具有極高的便捷性。共享汽車為居民出行、道路擁堵問題的緩解及環(huán)境改善做出了不小的貢獻(xiàn),但是當(dāng)前共享汽車也面臨著一定的問題:
(1)部分共享汽車平臺(tái),不僅要支付汽車購(gòu)買的費(fèi)用,后期汽車的保養(yǎng)方面也需投入成本,甚至需要為事故責(zé)任方模糊的損傷車輛買單。
(2)用戶還車時(shí)若選擇停放在公共停車區(qū)域,難免會(huì)遇到目的地附近無停車位的情況;而若停放在停車場(chǎng),停車費(fèi)用的支付方將成為一個(gè)爭(zhēng)議點(diǎn)。
(3)在使用過程中,面對(duì)可能出現(xiàn)的刮蹭或其他事故,責(zé)任認(rèn)定又成為一大難題。
針對(duì)以上問題,提出設(shè)計(jì)一種基于3D成像和激光輪廓傳感技術(shù)的共享汽車非事故損傷檢測(cè)系統(tǒng),該系統(tǒng)針對(duì)車輛損傷后事故責(zé)任方模糊而導(dǎo)致共享汽車平臺(tái)承擔(dān)損失這一問題給出了應(yīng)對(duì)方案。針對(duì)共享汽車發(fā)生非事故損傷,自助歸還模式下無法準(zhǔn)確得到車輛實(shí)時(shí)信息,將導(dǎo)致一系列糾紛的問題,該系統(tǒng)可以全面反映車輛歸還時(shí)的車身外部與內(nèi)飾情況,并及時(shí)反饋給租賃人與平臺(tái),使自助還車系統(tǒng)代替人工檢測(cè),解決了人工檢測(cè)還車花費(fèi)時(shí)長(zhǎng)的問題,簡(jiǎn)化了還車步驟,可適應(yīng)快節(jié)奏的社會(huì)現(xiàn)狀。
2? ? 系統(tǒng)設(shè)計(jì)
2.1? ? 共享汽車非事故損傷的類型
調(diào)查發(fā)現(xiàn),目前市場(chǎng)上的還車檢查步驟完全依據(jù)手機(jī)上傳圖片進(jìn)行核查,具體過程是將車輛停到指定地點(diǎn)后,按標(biāo)準(zhǔn)例圖拍照,上傳照片即可完成還車。該方式對(duì)照片清晰度具有比較高的要求,還車時(shí)主要檢查汽車的外部和內(nèi)飾是否出現(xiàn)損傷。常見的非事故損傷有車身外部(包括保險(xiǎn)杠、后視鏡、玻璃等)出現(xiàn)擦刮掉漆、變形和破損,車內(nèi)儀表盤、座椅和內(nèi)飾等受損,整車出現(xiàn)變形(如底盤變?yōu)榱庑危噧?nèi)存在難以清洗的油漬污染等。
針對(duì)以上車輛損傷情況,按照損傷性質(zhì)進(jìn)行分類:
(1)車輛外部輪廓變形:車身外部出現(xiàn)的變形破損、整車的變形都劃分為輪廓變形。
(2)車漆擦刮:車漆擦刮掉落存在易于區(qū)分的顏色變化。
(3)內(nèi)飾損傷:包括固定的內(nèi)飾與形狀易于改變的內(nèi)飾(座椅會(huì)因?yàn)槭褂么嬖谛螤钭兓什贿m用于用輪廓變化測(cè)量)。
2.2? ? 系統(tǒng)檢測(cè)項(xiàng)目分類與原理設(shè)計(jì)
2.2.1? ? 檢測(cè)項(xiàng)目的分類
(1)針對(duì)車身外部輪廓變形,將使用前后檢測(cè)到的車身外形輪廓進(jìn)行對(duì)比,從而分析出車身外部與底盤是否出現(xiàn)變形和破損。
(2)車漆擦刮發(fā)生時(shí),該損傷會(huì)導(dǎo)致車身顏色變化,且在一定程度上出現(xiàn)微小形變。由于同一車型的車完全相同,故可采用圖像對(duì)比的方式檢測(cè)車身外部車漆情況。
(3)內(nèi)飾損傷的檢測(cè)采用局部外形比對(duì)和顏色比對(duì),由于車內(nèi)裝飾物等可能存在不屬于破壞的外形變化,所以鑒別嚴(yán)重污染和破損時(shí)就不能用整體圖片比對(duì)的方法,可以先得到整體圖片,再智能識(shí)別物件進(jìn)行局部對(duì)比檢測(cè)。
2.2.2? ? 系統(tǒng)工作原理
通過車牌識(shí)別系統(tǒng)檢測(cè)到待檢測(cè)車輛時(shí)喚醒系統(tǒng),進(jìn)入工作狀態(tài)后各部分檢測(cè)器對(duì)車輛進(jìn)行檢測(cè),再將檢測(cè)得到的車輛圖像信息等進(jìn)行比對(duì)處理得到車輛的損傷信息,指導(dǎo)用戶還車并定損。
2.2.2.1? ? 車牌識(shí)別系統(tǒng)
智能識(shí)別車輛牌號(hào)可從數(shù)據(jù)庫(kù)中得到車輛租借前的車況信息,具體步驟如下:
(1)牌照定位,定位圖片中的牌照位置;
(2)牌照字符分割;
(3)牌照字符識(shí)別,將分割好的字符進(jìn)行識(shí)別,組成牌照號(hào)碼。
通過以上步驟得到車輛的車牌信息,將車牌信息傳輸至數(shù)據(jù)庫(kù)就能得到租賃前的車況信息。
2.2.2.2? ? 各檢測(cè)部位的檢測(cè)原理
激光輪廓傳感器可采集到車輛的輪廓信息,利用可移動(dòng)攝像頭采集車輛內(nèi)飾等圖像信息,外部固定攝像頭采集車身外部圖像信息。將采集到的相應(yīng)信息傳輸至計(jì)算中心,計(jì)算機(jī)進(jìn)行相應(yīng)信息對(duì)比,檢測(cè)車輛是否出現(xiàn)損傷。
目前有許多不同技術(shù)可用于圖像對(duì)比,如Matlab和C++等。通過調(diào)查分析,本系統(tǒng)的汽車輪廓圖像識(shí)別對(duì)比采用C語言編譯程序,基本原理是將3D圖像放置于一個(gè)x-y-z的三維空間中,其中每點(diǎn)都有自己獨(dú)立的坐標(biāo),在兩圖片的同一位置上設(shè)定一個(gè)穩(wěn)定的基點(diǎn),通過比較圖片各點(diǎn)的對(duì)應(yīng)坐標(biāo)來識(shí)別圖片的不同并標(biāo)記,將不同的地方在三維坐標(biāo)內(nèi)展示出來,這樣就能得到汽車輪廓的變形信息。
車身外部車漆和內(nèi)飾仍利用圖像對(duì)比進(jìn)行識(shí)別,首先固定攝像頭采集完整的汽車外部圖像信息,用戶通過可移動(dòng)攝像頭采集汽車內(nèi)飾信息。汽車內(nèi)飾的位置與狀態(tài)不穩(wěn)定性導(dǎo)致不能通過固定的整體圖像對(duì)比,可先利用已經(jīng)成熟的物體智能識(shí)別技術(shù)將內(nèi)飾各部件獨(dú)立分割開(如座椅、儀表盤、方向盤、車內(nèi)面等),再利用各部件的外形特點(diǎn)進(jìn)行分類,如儀表盤、方向盤、車內(nèi)表面等可利用圖片對(duì)比輪廓識(shí)別損傷。車身外部車漆與外形易變化的內(nèi)飾可通過圖片對(duì)比顏色的變化來識(shí)別破損與污損,原理是將顏色單一的部件或一定范圍內(nèi)的區(qū)域標(biāo)記為一個(gè)顏色區(qū)域,進(jìn)行區(qū)域的顏色對(duì)比,若顏色不同則存在損傷情況,通過存在差異區(qū)域的大小來判定損傷的程度。
由于以上判定存在誤差,故引入判定結(jié)果權(quán)重系數(shù)x,當(dāng)存在污損和破損的情況時(shí),無疑后者的損失更大,該權(quán)重系數(shù)x會(huì)以汽車的損傷程度與客戶的歷史使用損傷情況以及市場(chǎng)上整體共享汽車內(nèi)飾的損傷情況為依據(jù)初步得到一個(gè)數(shù)據(jù),從而得到一個(gè)大致的損傷金額,判斷用戶是否需要賠償。信息將反饋至用戶和平臺(tái)處,用戶若認(rèn)為判定存在錯(cuò)誤可以反饋給平臺(tái),平臺(tái)再派區(qū)域負(fù)責(zé)人進(jìn)行人工復(fù)檢。
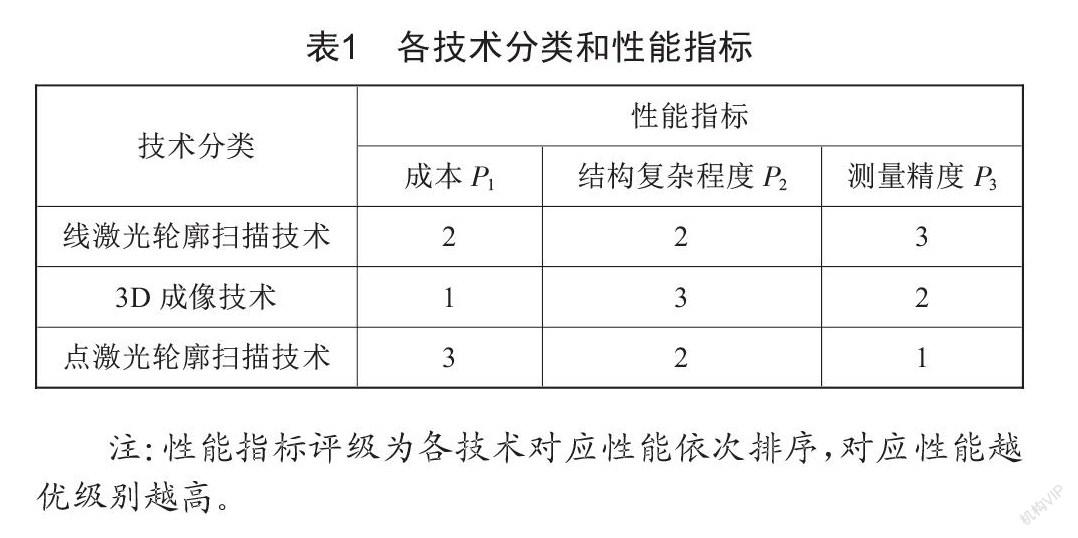
2.2.2.3? ? 各技術(shù)性能與適用范圍
針對(duì)系統(tǒng)主要考慮的指標(biāo),對(duì)各技術(shù)進(jìn)行綜合分析,如表1所示。
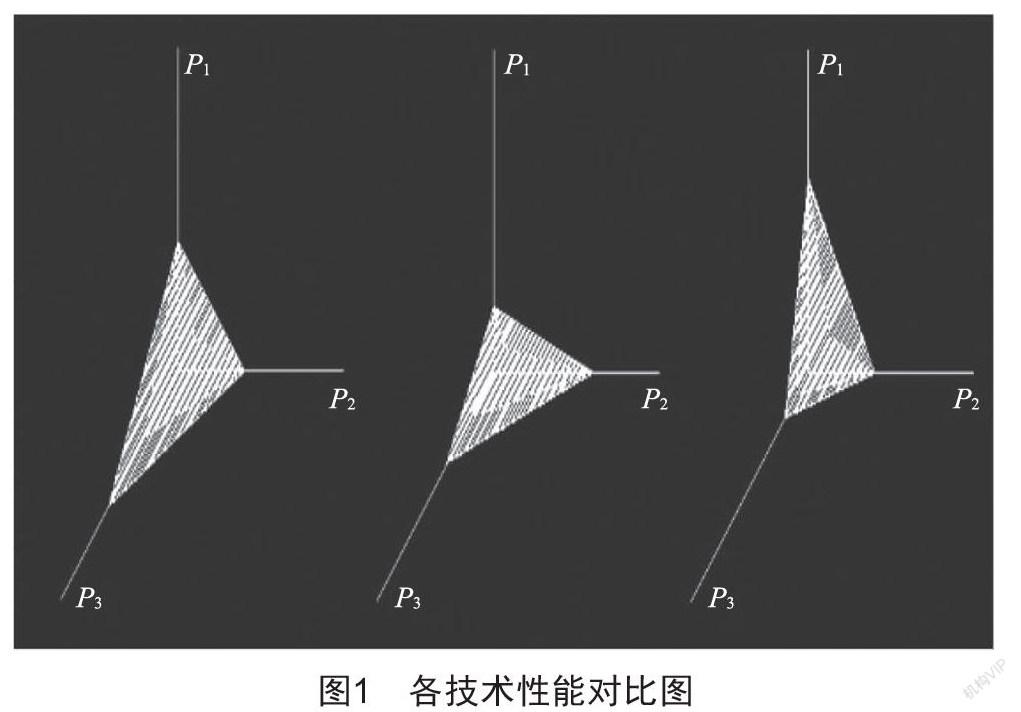
圖1從左至右分別展示了線激光輪廓掃描技術(shù)、3D成像技術(shù)、點(diǎn)激光輪廓掃描技術(shù)的性能。
由圖1分析可知:
(1)檢測(cè)汽車外形和輪廓:車身外部出現(xiàn)的變形和破損、車輛外部輪廓變形的檢測(cè)對(duì)任一方面的性能要求都很高,故選擇線激光輪廓掃描技術(shù)。
(2)檢測(cè)汽車車漆:車漆擦刮掉落會(huì)有刮痕導(dǎo)致的車身顏色變化,車內(nèi)存在垃圾和污染也會(huì)使拍攝的圖片與原圖數(shù)據(jù)不符。由于此方面的檢查對(duì)精度要求不高,所以不以P3作為主要參考,選擇使用攝像頭的3D成像技術(shù)。
(3)車內(nèi)的內(nèi)飾檢查與衛(wèi)生:車內(nèi)檢查需使用可移動(dòng)的攝像頭對(duì)車內(nèi)進(jìn)行掃描攝像,故選擇使用攝像頭的3D成像技術(shù)。
點(diǎn)激光輪廓測(cè)量與線激光輪廓測(cè)量技術(shù)原理相似。點(diǎn)激光輪廓掃描利用同樣的原理進(jìn)行測(cè)量,每次可測(cè)量一個(gè)點(diǎn),將各點(diǎn)整合得到線和平面的形狀,但不適用于本系統(tǒng),故淘汰。
2.2.3? ? 系統(tǒng)的裝置配備
檢測(cè)后的信息反饋至系統(tǒng)、租賃平臺(tái)和顧客后,若無須索賠則系統(tǒng)判定還車成功;若存在意外情況,則提示顧客將車輛停放至指定的故障車輛區(qū)完成還車,后續(xù)問題經(jīng)平臺(tái)調(diào)查后再進(jìn)行協(xié)商。
針對(duì)上述功能,整個(gè)系統(tǒng)需要具備的裝置如下:
(1)車牌識(shí)別系統(tǒng)(車牌識(shí)別攝像機(jī)、補(bǔ)光設(shè)備、車輛檢測(cè)器)。
(2)線激光輪廓傳感器(測(cè)量范圍:寬2 000 mm,高2 000 mm;精度5 mm)。
(3)高清攝像頭(可轉(zhuǎn)動(dòng)的攝像頭安裝基座、補(bǔ)光設(shè)備)。
(4)可移動(dòng)小型攝像頭(放置箱體儲(chǔ)存攝像頭)。
(5)攝像頭與傳感器管理設(shè)備、系統(tǒng)管理電腦系統(tǒng)。
2.3? ? 損傷檢測(cè)技術(shù)
2.3.1? ? 輪廓及底盤變形檢測(cè)識(shí)別
輪廓及底盤變形通過線激光輪廓掃描,可將車身外形轉(zhuǎn)換為輪廓實(shí)際圖形進(jìn)行檢測(cè)。線激光輪廓掃描技術(shù)測(cè)量精度高、速度快、參數(shù)多,對(duì)環(huán)境和測(cè)量目標(biāo)要求不高,超大景深,大縱深檢測(cè),無須照明和矯正。
激光輪廓傳感器通過以下兩個(gè)步驟對(duì)物體進(jìn)行3D測(cè)量:
(1)采集點(diǎn)云數(shù)據(jù):移動(dòng)物體或傳感器,每隔一段距離進(jìn)行一次輪廓測(cè)量,得到一系列輪廓,這些輪廓組成了物體表面3D數(shù)據(jù)。類似于將物體切成若干薄片,得到每片的表面輪廓,這些輪廓共同組成了3D表面。
(2)通過3D分析軟件進(jìn)行分析后可以對(duì)物體表面進(jìn)行凹凸缺陷檢測(cè)。
激光輪廓傳感器測(cè)量原理:激光輪廓傳感器采用激光三角反射式原理,激光束被放大形成一條激光線投射到被測(cè)物體表面上,反射光透過高質(zhì)量光學(xué)系統(tǒng)被投射到成像矩陣上,經(jīng)過計(jì)算得到傳感器到被測(cè)表面的距離(Z軸)和沿著激光線的位置信息(X軸)。移動(dòng)被測(cè)物體或輪廓儀探頭,就可以得到一組三維測(cè)量值。
激光輪廓傳感器在測(cè)量中具備的優(yōu)勢(shì):
(1)非接觸測(cè)量:利用激光束在被測(cè)目標(biāo)表面產(chǎn)生的輪廓線來實(shí)現(xiàn)輪廓測(cè)量,因此是典型的非接觸測(cè)量傳感器,具有無測(cè)量力、無磨損、長(zhǎng)壽命等特點(diǎn)。
(2)測(cè)量精度高:目前激光輪廓傳感器分辨率高達(dá)
±0.1%FS。
(3)測(cè)量速度快:測(cè)量速度可達(dá)幾萬赫茲級(jí)。
(4)測(cè)量參數(shù)多:可以測(cè)量眾多三維參數(shù),如高度、高度差、點(diǎn)—點(diǎn)距離、點(diǎn)—線距離、半徑、夾角、標(biāo)準(zhǔn)輪廓偏差等。
(5)適用范圍廣:由于激光輪廓傳感器以激光作為測(cè)量媒介實(shí)現(xiàn)目標(biāo)輪廓參數(shù)的準(zhǔn)確測(cè)量,因此它對(duì)被測(cè)目標(biāo)沒有太多的限制,包括軟硬、冷熱、黑白、明暗等,尤其適用于一些柔軟目標(biāo)、狹小空間。
2.3.2? ? 車漆與內(nèi)飾損傷檢測(cè)識(shí)別
車漆與內(nèi)飾損傷采用高清攝像頭合成3D圖像進(jìn)行檢測(cè),3D成像技術(shù)成本低廉、結(jié)構(gòu)簡(jiǎn)單、測(cè)量精度高。
攝像頭的3D成像原理:攝像頭的成像原理與人眼成像原理類同,眼睛是光的感知器官,類似攝像頭,角膜和晶狀體相當(dāng)于鏡頭,能夠聚焦成像,眼內(nèi)的視網(wǎng)膜相當(dāng)于感光芯片,能夠接收物象。外界景物發(fā)出的光線經(jīng)過角膜、晶狀體等聚焦后投影到視網(wǎng)膜上,就能顯示景物的影像。同理,外界景物發(fā)出的光線,經(jīng)過鏡頭等聚焦后投影到感光芯片上,顯示出景物的影像。攝像頭的感光芯片將影像變成電荷脈沖,通過信號(hào)轉(zhuǎn)換傳遞給DSP和放大電路,然后將輸出視頻影像信號(hào)顯示出來。
2.4? ? 系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
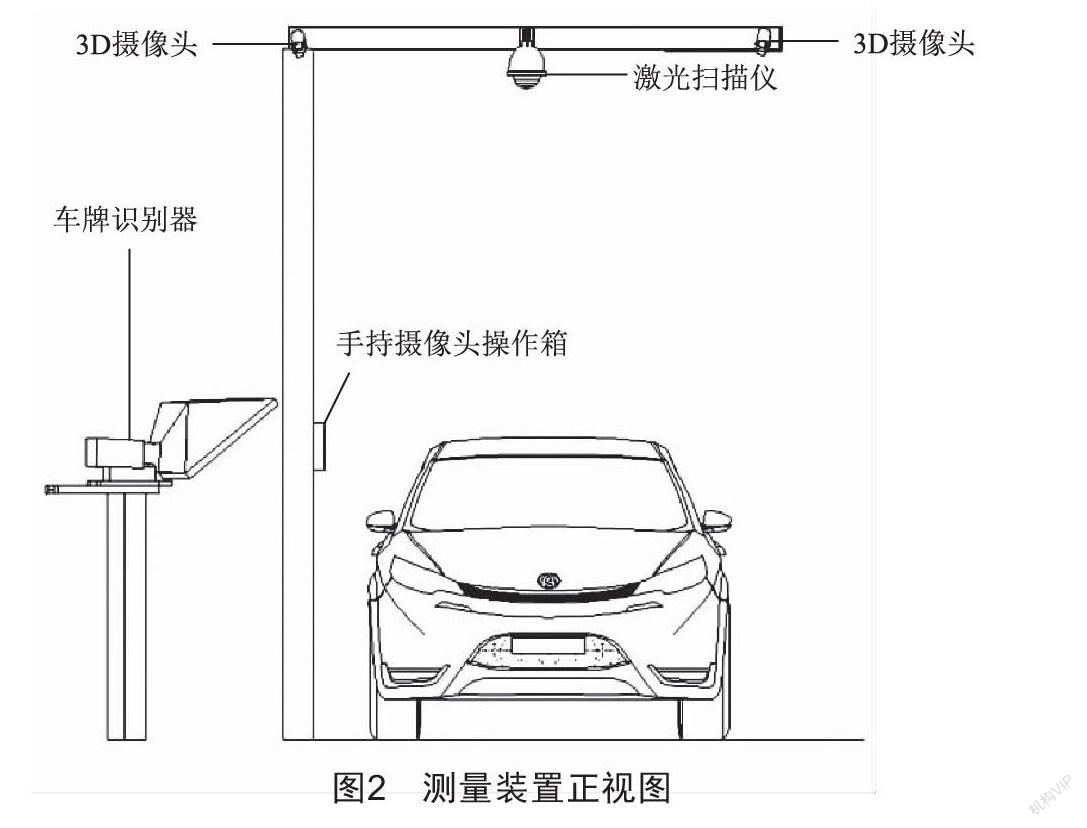
結(jié)合傳感器技術(shù)和圖像處理技術(shù),設(shè)計(jì)了一種適合室內(nèi)、室外使用,支持動(dòng)態(tài)或靜態(tài)測(cè)量汽車的輪廓、內(nèi)飾和車漆的測(cè)量系統(tǒng),該系統(tǒng)通過圖片拼接技術(shù)和傳感器技術(shù)獲取帶有標(biāo)尺的車輛全照?qǐng)D片以及車輛輪廓尺寸參數(shù),裝置整體構(gòu)成如圖2所示。
圖中設(shè)備分別為測(cè)量支架、輪廓傳感器(激光掃描儀)、外輪廓攝像裝置(3D攝像頭)、可移動(dòng)攝像裝置(手持?jǐn)z像頭操作箱)、車牌識(shí)別裝置(車牌識(shí)別器),另外還包括計(jì)算機(jī)、無線傳輸設(shè)備和測(cè)量裝置等。該系統(tǒng)占地面積小,經(jīng)擴(kuò)展后可測(cè)量任意尺寸大小的車輛,不受場(chǎng)地限制,安裝方便。系統(tǒng)測(cè)量過程部分具有動(dòng)態(tài)性和實(shí)時(shí)性,為了保證測(cè)量的準(zhǔn)確性,在測(cè)量外部輪廓和車漆時(shí),被測(cè)車輛需要以不高于5 km/h的速度通過。內(nèi)飾的檢測(cè)需要使用者將車輛停穩(wěn),從圖中的手持?jǐn)z像頭操作箱中拿出可移動(dòng)攝像頭,手持?jǐn)z像頭進(jìn)行內(nèi)飾環(huán)攝。
車輛進(jìn)入測(cè)量區(qū)域時(shí)首先觸發(fā)車牌識(shí)別系統(tǒng),使檢測(cè)系統(tǒng)進(jìn)入工作狀態(tài),各設(shè)備啟動(dòng);當(dāng)車輛駛出測(cè)量區(qū)域時(shí),光電傳感器監(jiān)測(cè)到車輛駛出車輛范圍后關(guān)閉各測(cè)量設(shè)備,計(jì)算并輸出測(cè)量結(jié)果,經(jīng)過處理后判定該車是否符合規(guī)定。
3? ? 系統(tǒng)應(yīng)用分析
共享汽車歸還損傷檢測(cè)儀器分為車身檢測(cè)器、內(nèi)飾檢測(cè)器兩部分,采取非接觸方式檢測(cè)汽車損傷情況,并將檢測(cè)情況上傳至平臺(tái)和用戶手機(jī)端。結(jié)合成本分析,該系統(tǒng)適用于室內(nèi)外共享汽車略多的停車場(chǎng)。
車身檢測(cè)儀安裝在停車場(chǎng)的入口,與車牌檢測(cè)器形成一個(gè)功能復(fù)合體。當(dāng)車牌檢測(cè)器錄取汽車的車牌后,車身檢測(cè)儀開始工作,該設(shè)定大幅降低了電能消耗。同時(shí),車身檢測(cè)器會(huì)把相應(yīng)車牌的測(cè)量信息通過網(wǎng)絡(luò)傳輸?shù)狡脚_(tái),并與同一輛車前一次的數(shù)據(jù)進(jìn)行比對(duì),經(jīng)過集成后的數(shù)據(jù)低于某一閾值時(shí)判定該車正常,而后才可執(zhí)行還車。汽車停好后,用戶使用附近的手持式3D掃描儀,通過掃描平臺(tái)發(fā)出的二維碼確認(rèn)車輛信息;按照相應(yīng)步驟,詳細(xì)、完整地對(duì)汽車內(nèi)飾進(jìn)行掃描;數(shù)據(jù)傳輸至平臺(tái),經(jīng)相應(yīng)軟件進(jìn)行比較;最后將數(shù)據(jù)反饋至用戶和平臺(tái),并留有備份。車牌檢測(cè)器和車身檢測(cè)器都按照《民用建筑電氣設(shè)計(jì)規(guī)范》(JGJ/T 16—1992)、《建筑與建筑群綜合布線系統(tǒng)工程設(shè)計(jì)規(guī)范(修訂版)》(CECS 72:97)、《建筑與建筑群綜合布線系統(tǒng)工程施工及驗(yàn)收規(guī)范》(CECS 89:97)、《建筑智能化系統(tǒng)工程設(shè)計(jì)管理暫行規(guī)定》(建設(shè)〔1997〕290號(hào))的要求進(jìn)行布置。
公共設(shè)施應(yīng)長(zhǎng)遠(yuǎn)考慮,留有發(fā)展余地,故每個(gè)車牌檢測(cè)器和車身檢測(cè)器都留有接口,以備后續(xù)完善功能或增加設(shè)備。車身檢測(cè)器安置于道路兩旁,手持式掃描儀與手持式攝像儀用龍門架安裝,占地極小。設(shè)備用電由停車場(chǎng)的配電房提供,不需要額外改建。在歸還汽車的過程中,租車人僅需用手持式掃描儀按規(guī)定流程對(duì)車輛的內(nèi)飾進(jìn)行檢測(cè),具有極高的便捷性。
4? ? 結(jié)語
共享汽車的應(yīng)用普及提高了居民生活的便捷度,然而,由于其行業(yè)制度的不完善,造成其所附加的對(duì)于共享汽車非事故損傷后責(zé)任方的認(rèn)定及損傷程度的監(jiān)測(cè)成為大眾關(guān)注的焦點(diǎn)。共享汽車非事故損傷無論是對(duì)用戶還是共享汽車公司來說都是不小的損失,因此當(dāng)下亟需健全及規(guī)范行業(yè)制度。共享汽車非事故損傷后責(zé)任方的認(rèn)定及損傷程度的監(jiān)測(cè)作為阻礙當(dāng)前共享汽車產(chǎn)業(yè)發(fā)展的重要因素之一,應(yīng)尋找合理的解決方案。本文所述系統(tǒng)將有效減少共享汽車平臺(tái)投入成本,同時(shí)提高歸還汽車的效率,讓平臺(tái)能及時(shí)掌握旗下每一輛共享汽車的狀態(tài)信息。
[參考文獻(xiàn)]
[1] 閆慧蘭,姚博文.關(guān)于汽車共享服務(wù)的研究綜述[J].華章,2014(24):382.
收稿日期:2021-08-18
作者簡(jiǎn)介:顧赫(1999—),男,寧夏銀川人,研究方向:車輛工程。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
