一種基于PLC控制的液壓實訓臺控制系統設計
2021-11-28 12:18:52林金英陳清彬
電子制作 2021年20期
林金英,陳清彬
(福建船政交通職業學院,福建福州,350007)
1 控制要求
液壓實訓臺控制系統主要包括:液壓運行控制系統,液壓系統數據采集系統,模擬故障設置系統。
整個控制系統既可以實現本地集中控制也可以實現遠程教室控制,主要通過遠程/本地切換開關。當系統處于本地控制模式下遠程控制臺失效,本地控制臺的PLC模塊可以控制相應執行器的動作,實現實訓臺各個機構同步操作并將系統狀態傳遞到多媒體狀態顯示畫面實現本地教學任務;當系統處于遠程控制模式下本地控制臺失效,遠程控制臺分站PLC模塊采集操作按鈕指令實現遠程的操作,并將系統狀態傳遞到多媒體狀態顯示畫面和主控制柜的觸摸屏上。
2 控制系統結構
為實現液壓系統的控制要求,采用主從站集中管理的方式,兩個操作臺PLC分站與主控制柜的PLC主站采用Profibus總線進行數據通信,主從站間的傳送和接收的數據主要是控制方式、狀態信號、閥的控制指令等;變頻驅動系統與主PLC系統通過Profibus總線連接,實現主泵電機的運行控制和主泵電機的運行狀態監控。主PLC與多媒體系統通過以太網進行連接,以TCP/IP協議的方式實現通訊。觸摸屏通過MPI與主PLC進行連接,在屏幕上顯示狀態信號或對控制系統操作。PLC控制網絡如圖1所示。
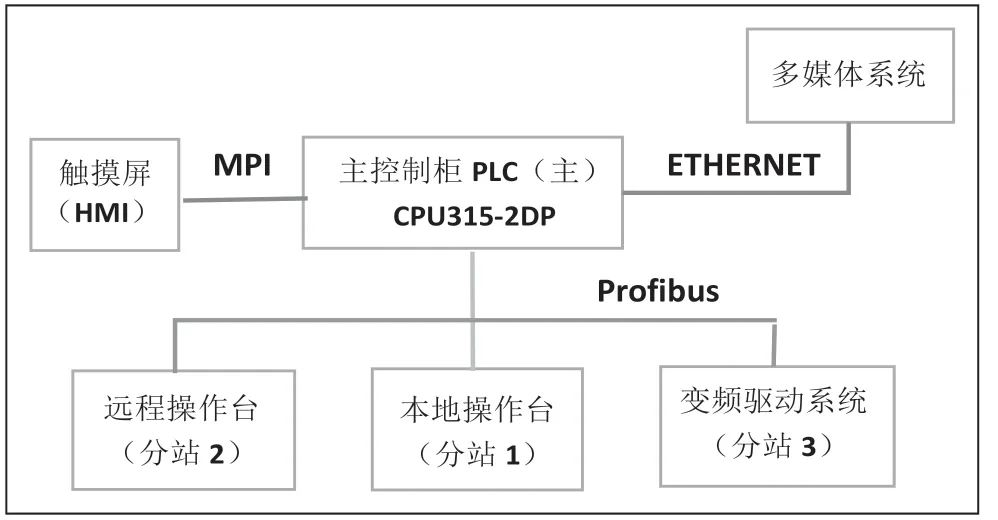
圖1 PLC控制系統結構網絡
3 實訓臺電氣控制系統硬件選型
電氣控制系統除滿足液壓控制要求,還要具備數據采集和通訊要求,選用PLC產品型號為西門子系列中的S7-300產品。其模塊化結構、易于實現分布式的配置以及性價比高、電磁兼容性強、抗震動沖擊性能好。主要特點有:循環周期短、處理速度高;指令集功能強大,可用于復雜功能;模塊化結構,設計更加靈活;功能模塊和I/O模塊可選擇等。
■3.1 信號模塊的選擇
信號模塊是連接PLC與外部設備的接口模塊,主要是對輸入或輸出信號進行相應的轉換,便于信號的處理和執行。包含數字輸入/輸出模塊、模擬量輸入/輸出模塊。
(1)數字輸入(DI)模塊的選用
系統中現場檢測元件和模塊間的距離較近,故選用24V DC電壓可以滿足要求。選用 SM321模塊,具體型號為6ES73211BL00-0AA0,考慮到點數的冗余,主PLC的SM321模塊數量為1,子PLC的SM321模塊數量為4。具體參數見表1。
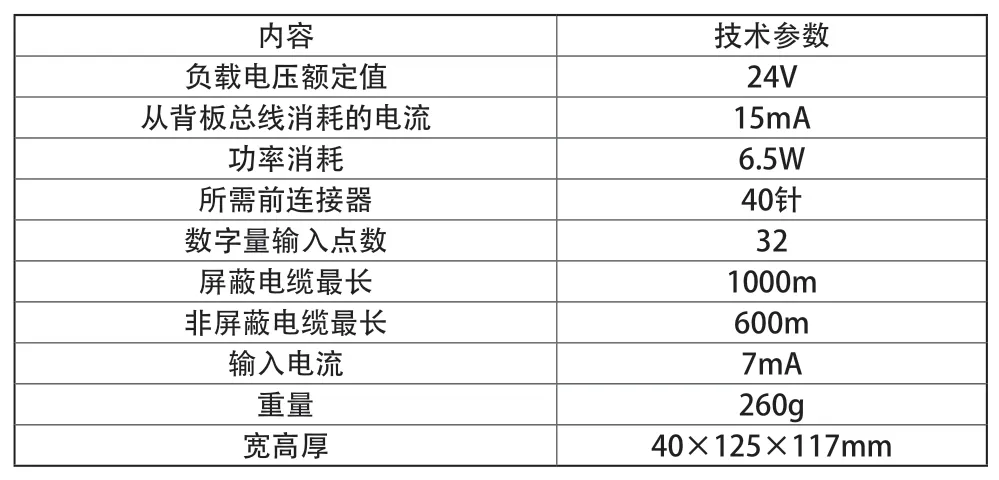
表1 輸入模塊參數
(2)數字輸出(DO)模塊的選用
系統輸出元件主要是電磁閥和指示燈。系統選用SM322模塊。型號為6ES73221BL00-0AA0,主PLC的SM321模塊數量為2,子PLC的SM321模塊數量為10,具體參數見表2。
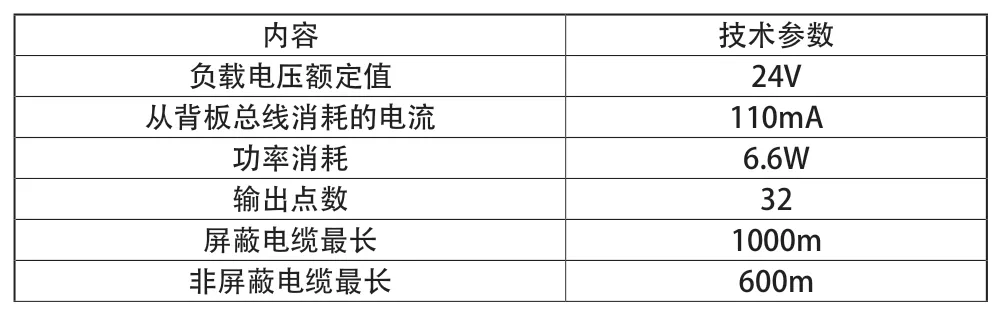
表2 數字輸出模塊參數

?
(3)模擬輸入(AI)模塊的選用
該控制系統中選用8×12位模塊SM331(8通道)。型號6ES7 331-7KF02-0AB0,主PLC的SM321模塊數量為1,子PLC的SM321模塊數量為6,具體參數如表3所示。
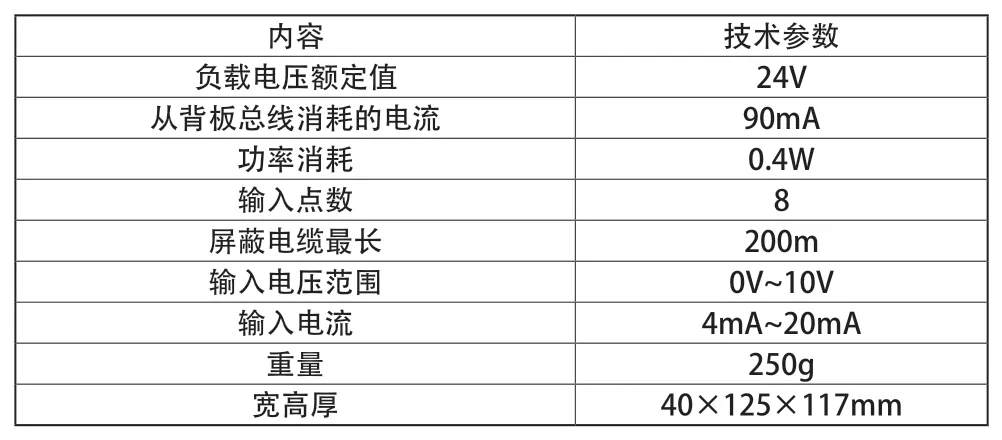
表3 模擬輸入模塊參數
(4)模擬輸出(AO)模塊的選用
模擬量輸出模塊采用4通道的4×12位SM332。型號為6ES7 332-5HF00-0AB0,主PLC的SM321模塊數量為0,子PLC的SM321模塊數量為8,具體參數見表4。
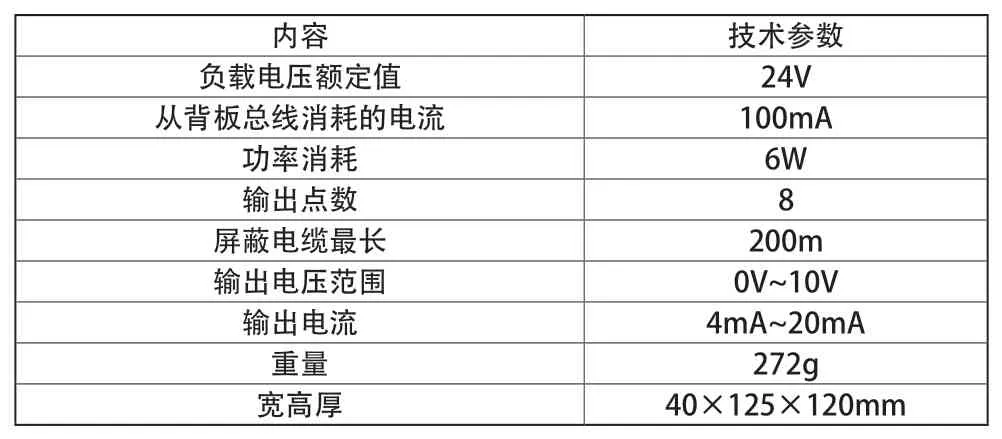
表4 模擬輸出模塊參數
(5)接口模塊
ET200M是一款高度模塊化的分布式I/O系統,防護等級為IP20。它使用S7-300可編程序控制器的信號模塊,功能模塊和通訊模塊進行擴展。防護等級為IP20,特別適用于高密度且復雜的自動化任務。同時支持Profibus和Profinet現場總線;使用S7-300信號模塊,功能模塊和通訊模塊;可以最多擴展8或12個S7-300信號模塊;通過配置有源背板總線模塊,ET 200M可以支持帶電熱插拔功能;可以將故障安全型模塊與標準模塊配置在同一站點內。
(6)以太網模塊CP343-1
CP可以方便的把第三方系統連接到SIMATIC S7上。由于CP具有極高的靈活性,可以實現多種不同的物理傳輸介質、傳輸速率,甚至可以自定義傳輸協議。
■3.2 其他主要元件選型
按鈕及指示燈選型:按鈕及指示燈選擇施耐德公司的產品。
壓力開關/傳感器:在實訓臺液壓控制系統中,需要實時檢測管路中的工作壓力情況同時也要反饋到PLC系統中。在選型中,選擇常開常閉的雙觸點開關,參數如表5所示。
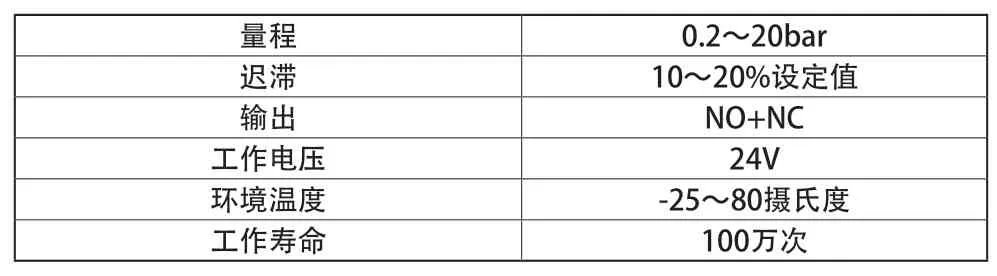
表5 電感式接近傳感器參數表
4 系統軟件設計
(1)程序系統組態
程序采用模塊化編程,PLC程序主要包括實訓臺本地和遠程兩種形式下的相關控制以及主從站之間數據的傳送和接收。主從站之間傳送和接收的數據主要包括相應的控制方式、采集信號、電磁閥線圈控制信號、比例閥控制信號等。組態完成后的結構圖如圖2所示。
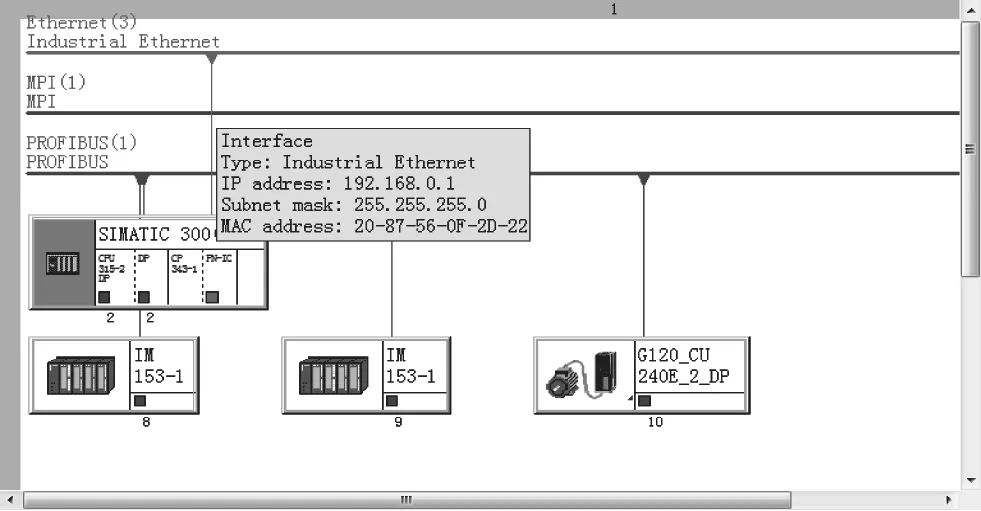
圖2 實訓臺網絡組態圖
(2)主要程序功能塊和系統結構
不論是本地操作臺控制還是遠程控制模式下,存在共同的控制程序,即電機運行、閥控制模塊、實訓臺系統數據采集、故障模擬設置、多媒體系統連接等。因此在整個程序設計中,將該五部分的程序寫入到五個功能塊。在主PLC程序和子PLC程序中調用該功能塊。調用功能塊的程序結構如圖3所示。

圖3 實訓臺程序結構
(3)控制方式選擇流程圖
系統運行開始,主程序檢測控制系統在沒有預設的系統故障前提下,實訓臺進入操作允許狀態。操作允許狀態與各允許條件滿足的情況下可以通過選擇開關來啟動本地控制臺或遠程教室操作臺。流程圖如圖4所示。
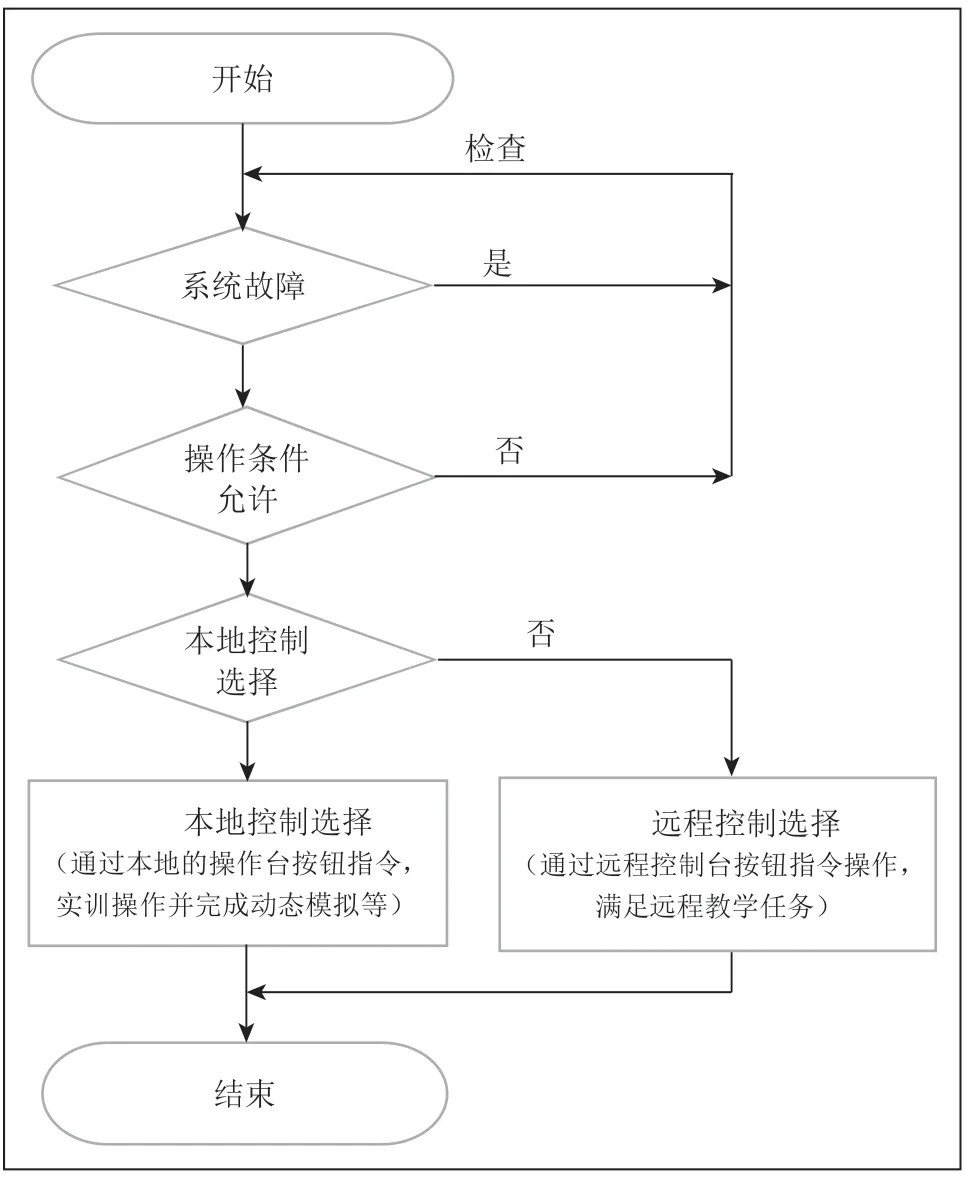
圖4 本地/遠程控制流程
本地操作控制臺采用“油電混合”的控制系統,手柄、腳剎等與常規挖機系統一致。遠程操作臺主要是用電的方式模擬液壓系統指令,用絕對值編碼器模擬液壓“油門”的大小,從而實現遠程的控制。
(4)HMI觸摸屏的布局組態
本地主控制柜上安裝的觸摸屏組態主要包括四部分:基本信息塊、運行狀態塊、故障信息塊、故障模擬系統塊等。
基本信息塊主要包含基本的操作臺控制按鈕:控制合/停、電機啟/停、本地控制、遠程控制、同步操作、壓載操作等。通過按鈕的切換實現不同的操作。
運行狀態塊主要包括系統的過程參數:電機運行過程參數(電流/電壓/轉速)、液壓系統壓力、各節點流量和壓力、各運行機構油缸長度等。
故障信息塊通過實時顯示系統故障信息和故障處理的幫助信息,主要用在控制系統維護。故障模擬系統塊通過觸發預先設置的模擬故障選項,干預系統的正常運行模擬系統故障存在,可以真實的反映故障發生時的各種現象。可以通過模擬排除故障達到教學要求,挖掘機故障模擬界面如圖5所示。

圖5 挖掘機故障模擬
(5)主泵電機控制程序設計
系統電機是液壓站中液壓主泵電機。液壓泵電機起動時,電機一般是輕載或者空載起動,起動難度不大,但由于本實訓臺模擬挖機系統使用電機功率大,起動電流過大,起動時間長,會對系統造成不利影響。因此本系統對電機起動和電機保護要求較高,采用變頻器來起動,其起動性能較好,系統中主電機需要調速功能,同時必須對電機的運行過程做數據采集。在程序功能塊FC5中通過DP通訊讀取變頻器的運動參數,解析數據組傳輸得到我們需要的電機運行過程參數。
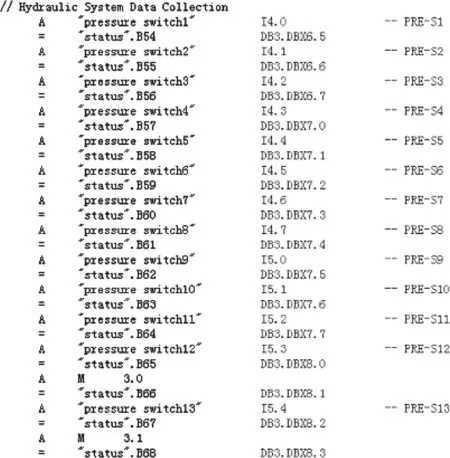
圖6 顯示屏信息
(6)多媒體系統程序設計
程序功能塊FC9主要用于多媒體顯示屏通訊。FC9通過以太網與多媒體主機連接,按TCP/IP通訊方式把采集到液壓實訓臺系統各個節點的狀態參數、各管路壓力開關狀態發送到多媒體實訓臺管理系統,顯示屏部分信息見圖6。管理系統的液壓原理圖在收到FC9送過來的狀態值切換原理圖上的顏色實現系統的動態變換。數據0代表管路未導通或無工作指令,多媒體顯示為灰色;數據1代表管路導通或觸發,多媒體顯示為綠色;數據2代表響應管理位置或液壓元器件故障,多媒體顯示為紅色,同時系統的故障信息模塊會提示相應的故障代碼和幫助信息。
猜你喜歡
名師在線·上旬刊(2021年3期)2021-09-10 04:20:48
裝備制造技術(2020年12期)2020-05-22 09:25:38
汽車維修與保養(2019年7期)2020-01-06 03:30:42
消費導刊(2018年10期)2018-08-20 02:56:28
電子制作(2017年8期)2017-06-05 09:36:15
汽車維護與修理(2016年10期)2016-07-10 08:17:41
信息記錄材料(2016年4期)2016-03-11 15:22:54
河南電力(2016年5期)2016-02-06 02:11:40
汽車維修與保養(2015年6期)2015-04-17 03:31:50
語文知識(2015年9期)2015-02-28 22:01:42