基于迭代學習控制的PMSM周期性轉矩脈動抑制*
2021-12-01 14:29:12季鵬鵬
計算機與數字工程 2021年11期
關鍵詞:方法
季鵬鵬 潘 豐
(江南大學輕工過程先進控制教育部重點實驗室 無錫 214122)
1 引言
永磁同步電機(Permanent Magent Synchronous Motor,PMSM)性能優越,廣泛用于各個領域,逐漸成為高精度伺服控制系統執行電機的主流[1]。但在實際工作環境下,受逆變器固有非線性特性和氣隙諧波磁通等因素影響,使電流發生畸變并引起電機產生周期性轉矩脈動。轉矩脈動的存在影響了系統的精確定位性能。因此,永磁同步電機轉矩脈動的抑制成為國內外學者研究的熱點。
針對永磁同步電機轉矩脈動抑制,從電機的控制策略出發,通過選擇和結合近幾年提出的各種智能算法,補償電機控制電流或電壓,從而抑制轉矩脈動。常見的方法有諧波電壓注入[2]、比例積分-準諧振補償器[3]、死區前饋補償[4]等。近年來迭代學習控制算法(Iterative Learning Controller,ILC)在永磁同步電機上得到了廣泛應用,文獻[5]提出了一種基于迭代學習控制算法的轉矩脈動抑制策略,該方法將負載轉矩與電機輸出轉矩的偏差信號經在線迭代學習補償到q軸電流的給定端,實現轉矩脈動抑制,效果良好。文獻[6]針對轉速紋波引起的周期性轉矩脈動,提出了一種基于開閉環P型迭代學習控制算法替代轉速調節器,也取得了較好的效果。此外,人工神經網絡、擴展卡爾曼濾波、模糊控制等也被運用到轉矩脈動抑制中[7~9],但這些方法較為復雜,在實際工程中實用性不強。
針對PMSM周期性轉矩脈動,提出一種基于迭代學習控制的轉矩脈動抑制方法,將轉速環的輸出與系統輸出轉矩的實時誤差經迭代學習補償到q軸電流給定,同時利用改進的粒子群算法(Particle Swarm Optimization,PSO)對迭代學習控制器中的關鍵參數進行優化整定,提高轉矩脈動抑制效果,并對提出的方法在仿真平臺進行驗證,同時與文獻[5]和文獻[6]中的方法進行對比分析,從而驗證本文方法的有效性。
2 永磁同步電機數學模型
以面裝式永磁同步電機為被控對象,考慮到實際運行狀態下的氣隙磁變、逆變器管壓降和死區時間等因素,導致電機三相電壓產生畸變,包含5、7、11、13等一系列高次諧波,其中5、7次諧波對系統影響較大,因此PMSM諧波模型為
其中,θe為電機電角度;u1、φ1分別為基波電壓的幅值和初始相位;u5、φ5分別為5次諧波電壓的幅值和初始相位,u7、φ7分別為7次諧波電壓的幅值和初始相位,在永磁體磁場作用下,5、7次諧波電壓產生的6、12次諧波轉矩方程為
其中,T0、T6、T12分別為直流轉矩、6次和12次諧波轉矩幅值;Tripple為總的諧波轉矩。
3 迭代學習控制抑制周期性轉矩脈動
迭代學習控制于20世紀80年代由Arimoto等首次提出,是一種對做重復運動的軌跡跟蹤系統的控制方法[10]。該算法通過多次利用先前的控制信息來產生期望輸入,通過在線迭代學習找到合適的輸入信號,使得被控變量獲得較好的跟蹤軌跡。本文設計了一種帶遺忘因子的開閉環PID型迭代學習控制器,將傳統轉速調節器的輸出電流作為系統跟蹤對象,系統輸出電磁轉矩為反饋,將兩者偏差信號經迭代學習控制算法實時補償到q軸電流的給定端,使其誤差在不斷重復迭代中減小,使得系統輸出轉矩較好地跟蹤速度調節器的輸出,最終達到轉矩周期性脈動抑制的效果。
3.1 迭代學習控制律
本文采用帶遺忘因子的開閉環PID型迭代學習控制算法進行轉矩周期性脈動抑制,迭代學習控制框圖見圖1,迭代學習控制律的數學描述為
3.2 基于迭代學習控制器的PMSM系統
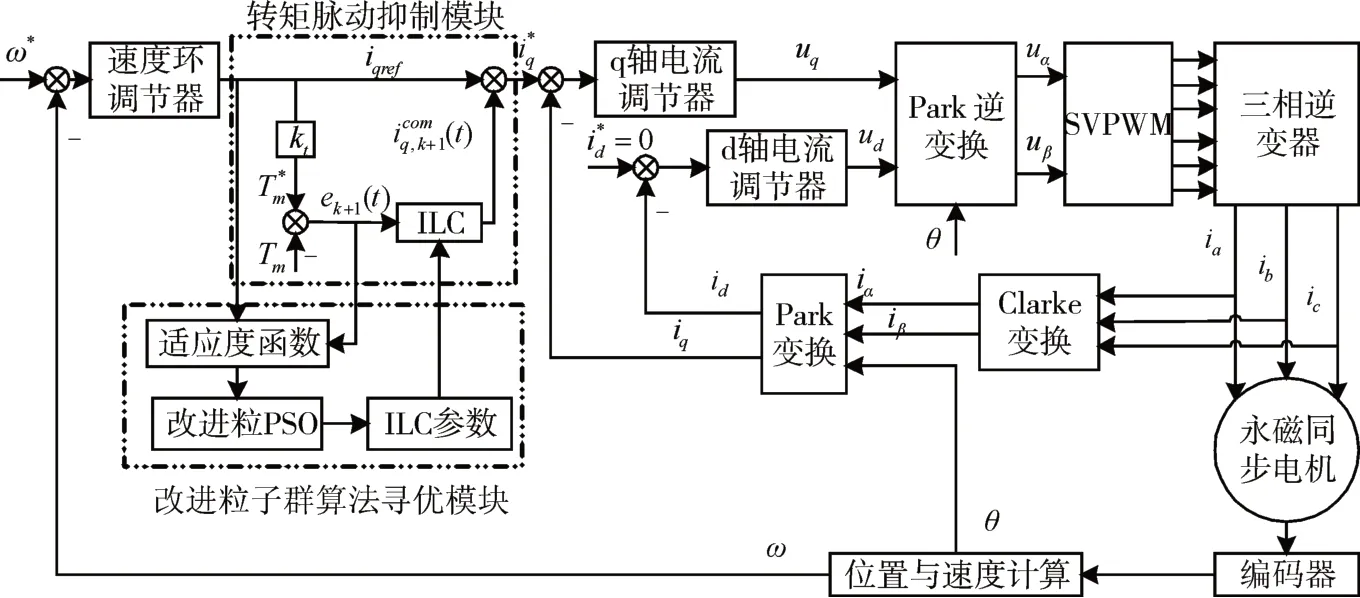
圖2 基于迭代學習控制的永磁同步電機系統框圖
4 改進粒子群算法對ILC的參數尋優
為獲得更好的轉矩脈動抑制效果,本文采用改進粒子群算法對迭代學習控制其中的四個關鍵參數kp、ki、kd和遺忘因子α進行優化整定。考慮到標準粒子群算法存在“早熟”收斂、容易陷入局部最優解和后期搜索精度不高等缺陷[13~14]。對此,提出一種改進的粒子群算法,將遺傳算法中雜交的概念運用到粒子更新迭代中,提高粒子多樣性、增強粒子全局探索能力[15]。同時,慣性權重根據粒子當前適應度優秀程度進行分類調整,標準粒子群算法為

其中,vid和xid分別為粒子的速度和位置;ω為慣性權重;rand為0與1之間隨機數;Pid為粒子i第d維的個體最優值;Gid為種群在d維空間的全局最優值;c1、c2為學習因子。本文選取的適應度函數:

式中,ke、ku為權重系數,f越小,表明相應粒子越靠近全局最優解。由于本文最終控制目標是使得電機啟動后穩態運行過程中輸出轉矩脈動較小,實際中很難在線測量轉矩脈動參數,經多次試驗,發現該適應度函數的大小與轉矩脈動程度呈正相關,因此采用間接的適應度函數來間接表示轉矩脈動大小。最優的迭代學習控制器參數就是f最小時所對應的的粒子位置。
4.1 改進PSO算法
設定粒子i的適應度值為fi,當前粒子最優適應度值為fmin,粒子群的平均適應度值為favg,將優于平均適應度值的粒子適應度值求平均,記為根據favg和f'avg這兩個節點將空間中的粒子種群分為三類:適應度值小于f'avg的粒子記為子群Ⅰ,將適應度函數值介于favg和f'
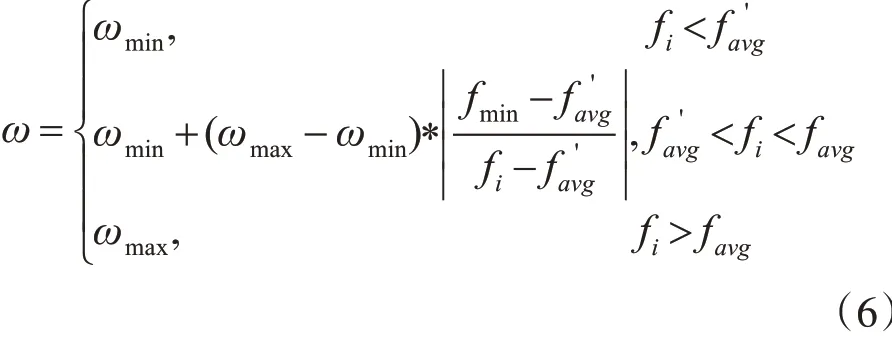
avg之間的粒子記為子群Ⅱ,將適應度函數值大于favg的粒子記為子群Ⅲ;根據所分三類子群分別進行不同的自適應操作,三類子群的慣性權重更新如下:其中,ωmin為慣性因子最小值,ωmax為慣性因子最大值;對于子群Ⅰ,粒子的適應度值較優,成熟度比較高,有較大可能在自身附近內搜索到最優值,此時應減小慣性權重,提高粒子的局部搜索能力;對于子群Ⅱ,粒子的適應度值為中等,具有中等成熟度,慣性權重的大小應兼顧自身經驗和群體經驗進行選取;對于子群Ⅲ,粒子的適應度值較差,成熟度較差,幾乎不能在自身范圍內搜索到最優值,此時應增大慣性權重,提高粒子的全局搜索能力。
同時,在標準粒子群算法的基礎上加入雜交的操作,在每次迭代中,根據雜交概率選取一定數量的父代粒子隨機兩兩雜交生成同等數目的子代粒子并替代父代粒子,雜交公式為
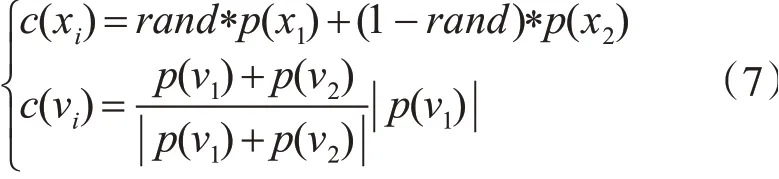
其中,c(xi)和c(vi)分別為子代的位置和速度;p(xi)和p(vi)分別為父代的位置和速度。
4.2 算法尋優步驟
基于改進PSO對迭代學習控制參數尋優具體步驟如下。
Step1:初始化,采用隨機方式對kp、ki、kd和α這四個粒子的速度和位置進行初始化,給定最大迭代次數T,種群規模n,粒子維度d。
Step2:將kp、ki、kd和α位置帶入ILC,運行系統,根據式(5)計算并評價當前粒子作用下的的適應度f,將粒子的位置和適應度存儲在粒子的個體極值Pid中,將所有Pid中最優適應度值的個體位置和適應度值保存在全局極值Gid中。
Step3:根據式(6)更新慣性權重。
Step4:根據式(4)更新下一代粒子的位置和速度,同時根據適應度值f,評價粒子位置的優劣,比較當前所有的Pid和Gid,并更新Gid。
Step5:由式(7)生成雜交后的子代粒子并替換父代粒子,保持Pid和Gid不變。
Step6:達到當前最大迭代數或適應度函數足夠好時,停止搜索并輸出kp、ki、kd和α的位置信息,否則返回Step2。
5 仿真實驗
5.1 Matlab仿真實驗
在Matlab中,采用M語言編寫改進的PSO尋優整定算法程序,并在Simulink中搭建基于迭代學習算法的PMSM雙閉環模型。對迭代學習控制器中的四個參數進行尋優整定,其取值范圍分別為kp∈[0,20],ki∈[0,20],kd∈[0,20],α∈[0,1],種群規模n=20,粒子維度d=4,最大迭代數T=100,
c1=4,c2=2,ωmax=0.9,ωmin=0.4,ke=100,ku=1,
Simulink中相應參數設置如表1。
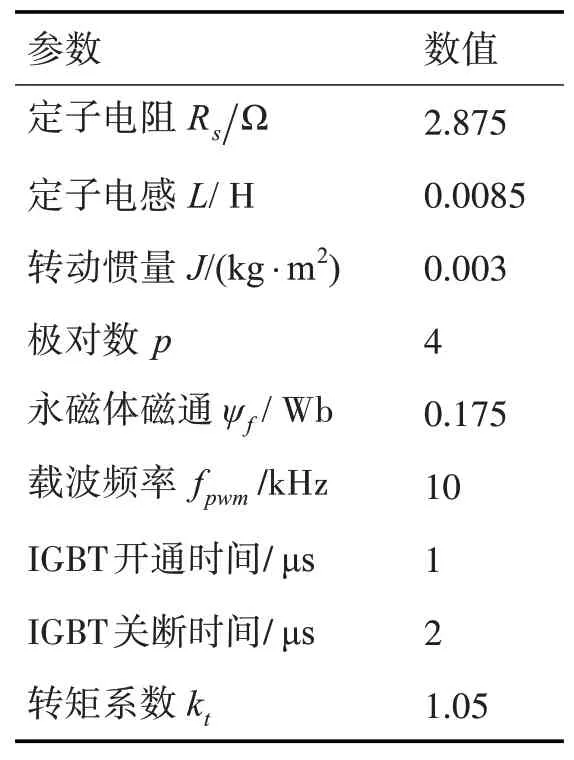
表1 Simulink仿真參數
給定轉速500 r min,恒定負載10 N·m。經改進PSO尋優整定后得到迭代學習控制器的最優參數如表2,適應度函數收斂曲線見圖3。

表2 改進的PSO尋優整定后結果
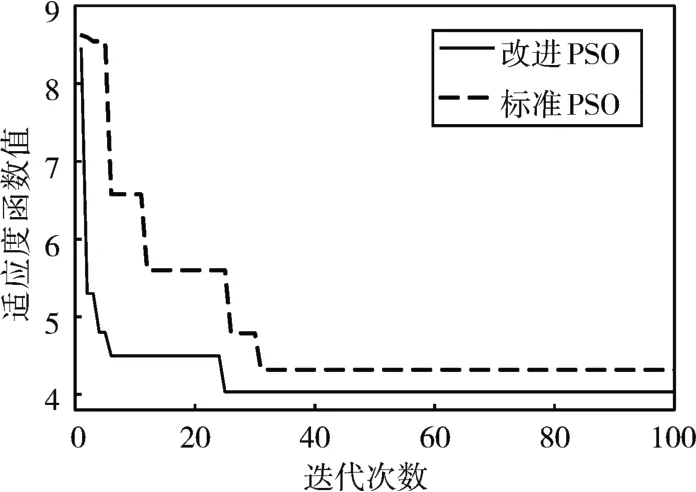
圖3 適應度函數收斂曲線
由圖3可知,相比于標準PSO算法,改進的PSO算法在第6次就找到了收斂區間,搜索速度快,于第25次迭代成功跳出“早熟”收斂,最終找到全局最優適應度值,并確定此時ILC控制器的4個參數。為驗證本文方法的有效性,將本文的方法和文獻[5]、文獻[6]的方法的轉矩脈動抑制效果進行對比,結果如圖4。

圖4 三種方法轉矩脈動抑制效果圖
圖4 (a)為原始系統輸出電磁轉矩,圖4(b)、圖4(c)、圖4(d)分別為采用文獻[5]、文獻[6]和本文提出方法的轉矩脈動抑制效果,三種抑制策略下對比可知,在恒定轉速恒定負載轉矩條件下,本文提出的方法相比于文獻[5]和文獻[6]具有較好的效果,使得輸出轉矩脈動幅值較小。采用轉矩脈動系數(Torque Ripple Factor,TRF)評價抑制效果,TRF公式為

式中,Tmax為轉矩最大值,Tmin為轉矩脈動最小值,Tavg為輸出轉矩平均值,轉矩脈動系數反映了電機輸出轉矩穩態時在給定目標值附近脈動的劇烈程度[16]。三種方法對應的轉矩脈動系數對比如表3。
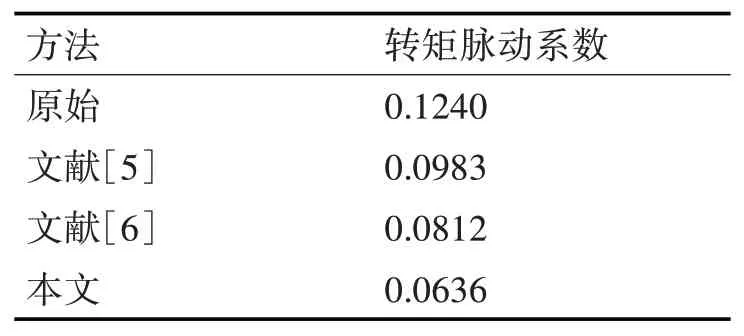
表3 三種方法對應的轉矩脈動系數
通過對比可知,本文提出經參數優化后的ILC轉矩脈動抑制效果相比于文獻中的兩種方法,擁有較低的轉矩脈動系數。同時采用快速傅里葉變換(Fast Fourier Transform,FFT)分析電機定子電流以及電磁轉矩中諧波分量的抑制效果,設定三相電流基頻率為33Hz,得到各次諧波含量對比如表4。
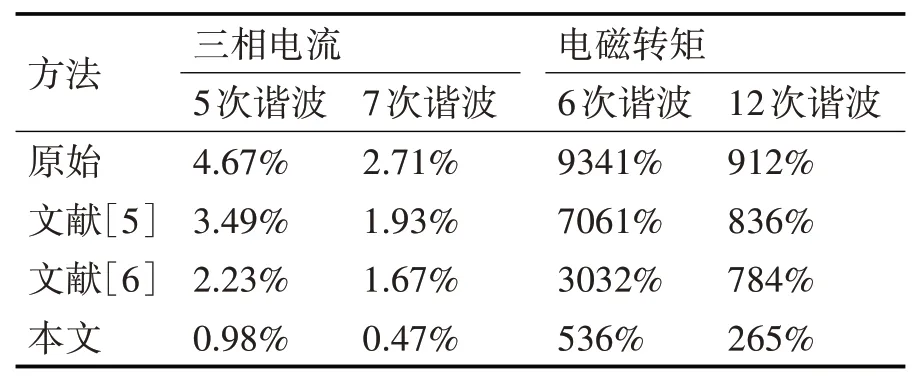
表4 三種方法各次諧波含量對比
由FFT分析可知,在原始系統的基礎上采用文獻[5]、文獻[6]所提出的轉矩脈動抑制策略后,定子三相電流和輸出電磁轉矩中的諧波分量均得到了有效抑制。在本文提出的抑制策略下,定子三相電流中的5、7次諧波含量分別由原來的4.67%和2.71%降為0.98%和0.47%,同樣的,電磁轉矩中的6、12次諧波含量分別由9341%和912%降為536%和265%。由此可見,在三相電流和電磁轉矩的諧波分量抑制方面,本文提出的方法取得了較好的效果,要優于其他兩種方案。
5.2 實驗平臺驗證
為進一步驗證本文提出方法的有效性,通過750W的PMSM矢量控制平臺對該算法進行對比試驗,實驗平臺如圖5所示。

圖5 實驗硬件平臺
實驗系統以MKV56F512Vxx24為控制核心,永磁同步電機額定參數為pN=750W,UN=280V,nN=3000 r min,Ld=0.36mH,Lq=0.15mH,Rs=64 mΩ,φf=0.07Wb,逆變器死區時間設定為10 μs,轉子慣量值為0.009 kg·m2,負載慣量為10倍轉子慣量。在給定轉速n*=100 r min條件下,通過Lab?VIEW上位機監控系統進行監測和采集數據,對比加入優化算法前后q軸電流脈動幅度,結果如圖6。
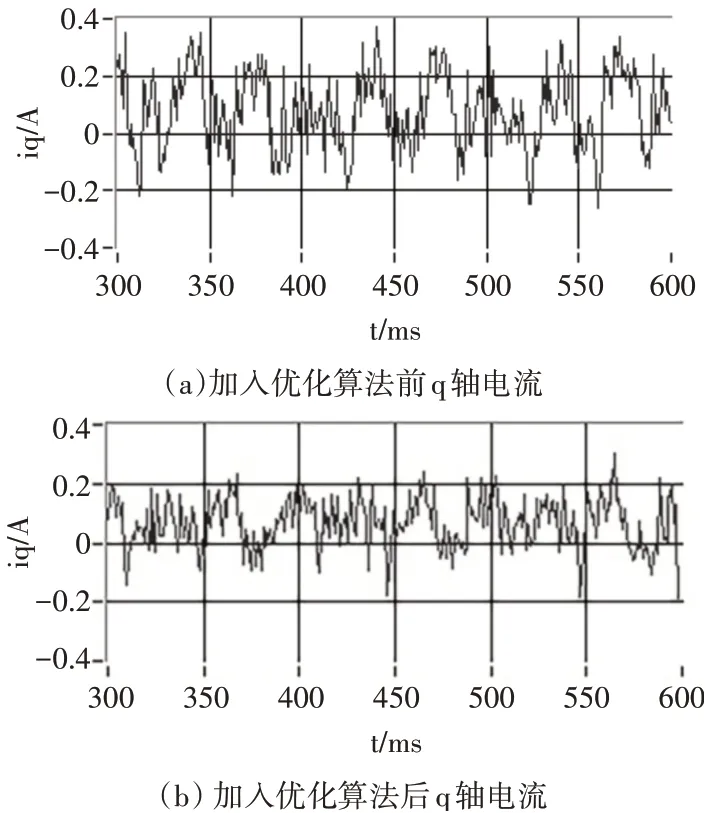
圖6 優化前后q軸電流對比
由圖6可以看出,在加入本文提出的優化算法之后,電流波形有了明顯改善,q軸電流的脈動幅度也得到了有效抑制。從實際的實驗結果可以看出,本文提出的經參數優化后的迭代學習的控制算法可以有效地抑制永磁同步電機轉矩周期性脈動。
6 結語
針對永磁同步電機運行時存在轉矩周期性脈動的問題,在傳統的轉速電流雙閉環矢量控制系統的基礎上,通過迭代學習控制的在線學習能力實時補償轉矩電流給定來抑制轉矩脈動,利用改進的粒子群算法對迭代學習控制器中的關鍵參數進行尋優整定,進一步提升了轉矩脈動抑制的效果。同時對比迭代學習控制在轉矩脈動抑制應用上的其他兩個方案,本文方法的效果更為明顯。最后搭建硬件實驗平臺驗證算法的可實現性和有效性。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56