基于無人機圖像的斜坡精細地形建模及精度分析
2021-12-02 03:23:18漆首令
資源導刊(信息化測繪) 2021年10期
關鍵詞:測量
漆首令
(廣西有色勘察設計研究院,廣西 南寧 530031)
1 引言
世界各地的山區往往地質構造復雜、地形起伏大、降水集中,容易造成滑坡地質災害[1,2]。進入21 世紀,隨著全球氣候和環境的急劇變化,滑坡災害發生的頻率和強度越來越高。此外,由于人口的增加和大規模經濟活動向山區擴展,滑坡災害造成的損失日益嚴重[3,4]。
邊坡穩定性分析和建模是預測滑坡并降低災害影響的有效方法,傳統方法以人工現場測量[2]為主,然而,受滑坡災害影響現場通信和交通中斷,人工開展地面測量費時費力,獲得的地形數據分辨率較低,在高海拔地區的邊坡穩定性分析和建模工作中,邊坡地形往往被簡化處理。但是,邊坡穩定性分析的準確性對于預測滑坡災害至關重要,因此,探索一種成本低、適應性強的快速精細建模方法具有重要的現實意義。
與傳統的人工測量方法相比,無人機航測系統具有圖像分辨率高、數據實時傳輸、適合高風險區域作業、成本低、機動靈活等優點,適應低空高分辨率遙感數據的采集。因此,無人機測量系統逐漸成為一種重要的空間數據采集方法,并已成功應用于多個領域,如森林資源清查、橋梁健康監測和電力線檢查等。
本文主要是利用無人機獲得研究區域的數字高程模型和高密度點云,并評估其準確性[5],為地形建模提供了一種新的思路和方法。主要工作包括 :(1)結合無人機航測圖像和地面控制點(GCP)坐標,生成測量區域高密度點云的高精度數字表面模型(DSM)。(2)使用預設檢查點坐標評估DSM 的精度。(3)使用地面激光掃描儀(TLS)獲得的數據評估高密度點云的精度。
2 數據采集
該研究在廣西圣堂山附近公路河谷地帶進行,海拔約1430m。早期的野外勘探發現該地區有一個不穩定的斜坡,斜坡后緣出現的拉伸裂縫如圖1 所示。

圖1 斜坡后緣出現的拉伸裂縫
在研究區域共采集無人機影像、掃描點云數據和RTK 控制點坐標等3 類數據。本次采用蜻蜓5S 多旋翼無人機,飛行時長(含最大任務載荷)為45min。搭載蜻蜓航空攝影儀,航攝儀具體參數如表1 所示。
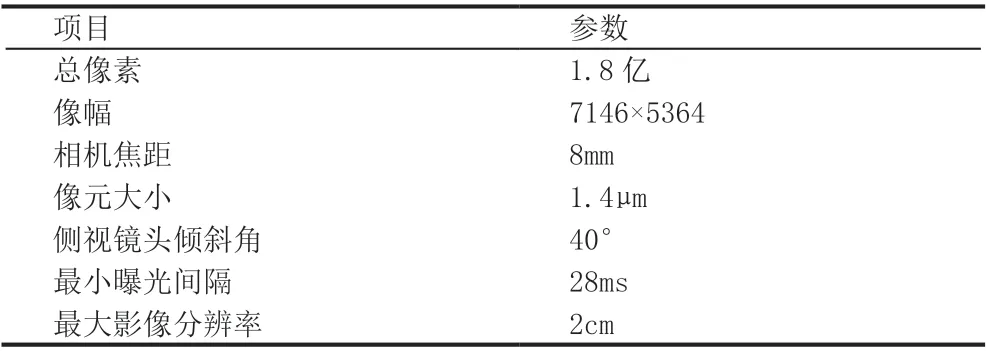
表1 航攝儀具體參數
測區面積約1.7km2。高差約50m,地形為丘陵,無高山,無高大建筑物,飛行空域良好。本次設計相對航高457m,航向重疊度80%,旁向重疊度60%,航線間距198m,航向拍照間距74m,像片地面分辨率8cm,本測區共飛行4 架次,獲取0.08m 分辨率的傾斜攝影影像1015 張。
本次像控點采用區域網布點方式,基本按照400m~500m間距布設1個像控點,共布置15個像控點,其中10 個像控點參與平差計算,5 個像控點用作檢查點。使用RTK系統(Hi-Target iRTK5)測量像控點坐標,GCP 測量值平面精度為8mm。無人機路線如圖2 所示。

圖2 無人機(UAV)路線
使用TLS(HS500i)獲取了真實坡面上的高密度點云數據,以評估基于無人機獲取的點云。TLS 的最大射程為500 米,測距精度為5 毫米。用于獲取野外三維(3D)點云的地面激光掃描儀(TLS)如圖3 所示。

圖3 地面激光掃描儀(TLS)
3 技術流程
基于無人機的航空攝影測量有5 個步驟:飛行準備、圖像采集、數據檢查、數據處理和輸出。獲取原始數據后,進行分析提取并匹配特征點,然后進行空中三角測量。確認空中三角測量結果滿足精度要求后,即可輸出結果。主要步驟如圖4 所示。
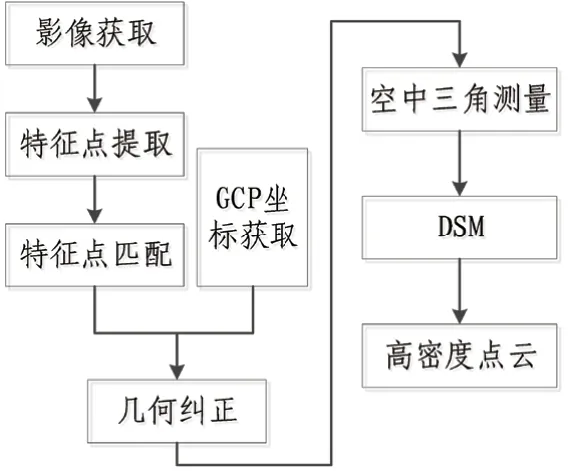
圖4 生成數字表面模型(DSM)和高密度點云流程
4 精度分析
表2 列出了水平和垂直方向5 個檢查點的絕對誤差值。水平和垂直方向的平均誤差分別為0.096 和0.266m。結果表明,DSM 在水平方向比在垂直方向精確。
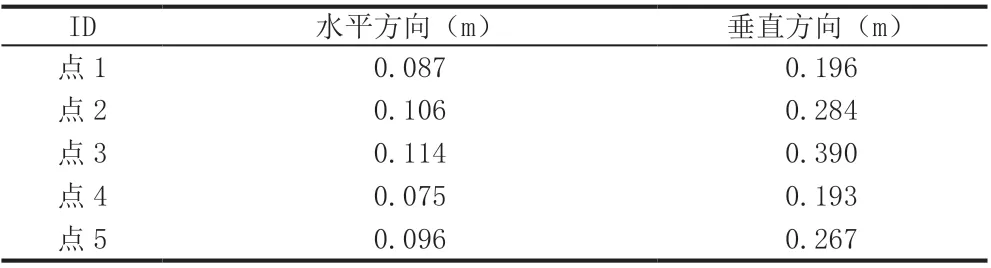
表2 檢查點錯誤的絕對值
用TLS 獲得的點云數據(用作實際值的近似值)評估從UAV 圖像獲得的點云精度。從兩類點云數據中選5個不同的特征點,測量每組點之間的距離(如圖5所示),計算基于無人機點云數據的絕對誤差值和誤差率。
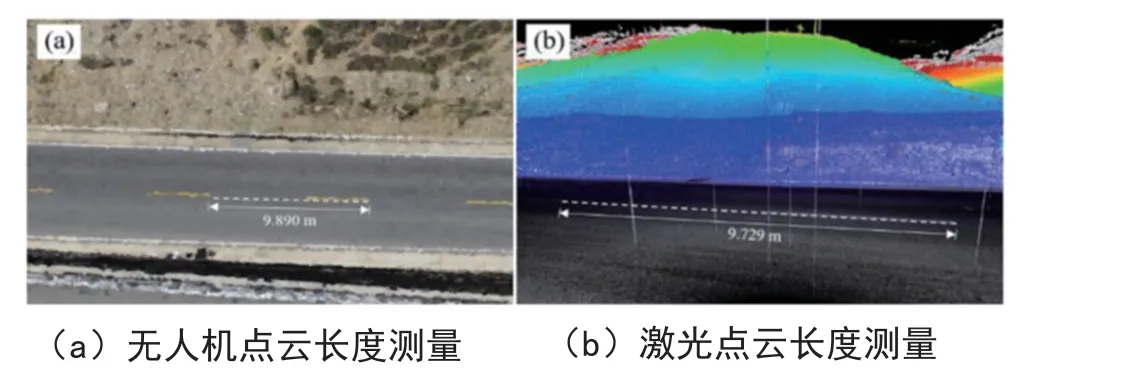
圖5 測量特征點之間距離的方法
表3 列出兩類點云數據中5 組特征點之間的距離結果。從UAV圖像收集的點云數據與TLS幾乎沒有差異。它們之間的誤差約為分米,平均絕對誤差為0.230 米。
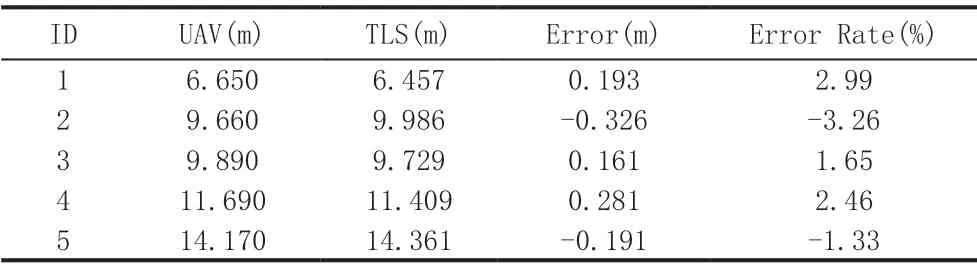
表3 無人機和TLS點云數據對比
5 結語
精度分析結果表明,DSM 的平均誤差為0.266m,點云數據的平均誤差為0.230m,因此,該研究可為類似邊坡數據采集工程提供準確獲取邊坡表面信息的參考方法。無人機航攝作為一種快速獲取高海拔地區邊坡數據的方法,在滑坡應急監測領域具有較高的實際應用價值,但模型精度還亟待提高。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00