智能駕駛激光雷達(dá)避障光學(xué)成像系統(tǒng)
2021-12-03 05:17:06劉福
兵器裝備工程學(xué)報(bào) 2021年11期
劉 福
(煙臺(tái)勝信數(shù)字科技股份有限公司, 山東 煙臺(tái) 264000)
1 引言
激光雷達(dá)是通過發(fā)射激光光束來探測目標(biāo)位置,速度等特征參數(shù)的雷達(dá)系統(tǒng),具有測量精度高,方向性、反應(yīng)速度快、可靠性高等優(yōu)點(diǎn)[1-4],由于激光雷達(dá)可以形成高達(dá)厘米級(jí)精度的三維環(huán)境地圖, 在車輛上使用進(jìn)行測量距離、繪制三維地圖、自動(dòng)導(dǎo)航與智能駕駛等功能,因此在智能駕駛中是一種非常重要的避障設(shè)備[5-8]。
進(jìn)入21世紀(jì)后,智能車載激光雷達(dá)因其能快速、精確得到前方目標(biāo)的三維形貌,同時(shí)及時(shí)獲得和前方目標(biāo)的距離,角度等方位信息,因此越來越多的國內(nèi)外學(xué)者對(duì)智能車載激光雷達(dá)進(jìn)行了深入研究。國外有代表性的有美國Velodyne 公司生產(chǎn)的 HDL 32E激光雷達(dá),德國的 IGI公司生產(chǎn)的LiteMapper車載激光雷達(dá),法國 TopoSys公司生產(chǎn)的 FalconⅡ車載激光雷達(dá),加拿大 Optech 公司生產(chǎn)的SHOALS車載激光雷達(dá)和ALTM車載激光雷達(dá),以及Leica 公司生產(chǎn)的ALSSO車載激光雷達(dá),瑞典 TopoEyeAB 公司生產(chǎn)的TopEye車載激光雷達(dá),其中尤其以美國Velodyne 公司生產(chǎn)的 HDL 32E車載激光雷達(dá)的最為著名,HDL 32E車載激光雷達(dá)基于掃描成像的原理進(jìn)行工作,它通過激光雷達(dá)發(fā)射光學(xué)系統(tǒng)和激光雷達(dá)接收光學(xué)系統(tǒng)工作獲取目標(biāo)的距離等信息,能夠?qū)崟r(shí)獲取待測目標(biāo)的全方位三維點(diǎn)云圖,通過和數(shù)字照片技術(shù)合成后,獲得具有精確距離信息的待測目標(biāo)的三維圖片,實(shí)現(xiàn)對(duì)待測目標(biāo)的三維模型。國內(nèi)對(duì)車載激光雷達(dá)研制生產(chǎn)的單位較少,目前主要有上海禾賽光電科技公司,深圳雷神智能公司,北京北科天繪公司等企業(yè)。近年來越來越多的學(xué)者對(duì)該領(lǐng)域進(jìn)行了相關(guān)的研究[9-16]。
本文深入研究分析了智能駕駛激光雷達(dá)系統(tǒng)的實(shí)現(xiàn)原理,考慮了車載環(huán)境和實(shí)際應(yīng)用需求,設(shè)計(jì)了一種智能駕駛激光雷達(dá)避障光學(xué)成像系統(tǒng),根據(jù)智能駕駛激光雷達(dá)系統(tǒng)的整體結(jié)構(gòu),選取適合系統(tǒng)需求的激光器和光電探測器,確定了智能駕駛激光雷達(dá)發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng)的參數(shù)要求,應(yīng)用 ZEMAX 光學(xué)仿真設(shè)計(jì)分析軟件完成了兩個(gè)光學(xué)系統(tǒng)的優(yōu)化設(shè)計(jì)和成像性能分析,仿真分析結(jié)果表明,智能駕駛激光雷達(dá)發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng)滿足系統(tǒng)整體的設(shè)計(jì)目標(biāo)要求。
2 智能駕駛激光雷達(dá)的原理和選型
智能激光雷達(dá)是智能駕駛汽車中功能最強(qiáng)大的傳感器,它可以區(qū)分人物海報(bào)和行進(jìn)中的行人,在三維立體空間中建模,檢測靜態(tài)物體,精確測量目標(biāo)的運(yùn)動(dòng)速度。智能駕駛激光雷達(dá)系統(tǒng)主要是由發(fā)射系統(tǒng)、激光接收系統(tǒng),發(fā)射信號(hào)控制處理系統(tǒng),接收信號(hào)控制處理系統(tǒng),軟件系統(tǒng)幾個(gè)部分組成。
智能駕駛激光雷達(dá)按照工作方式分為脈沖式激光雷達(dá)和相位式激光雷達(dá)兩大類。
脈沖式激光雷達(dá)的工作原理是其光源采用脈沖激光器,利用脈沖激光器向待測目標(biāo)發(fā)射激光脈沖,利用計(jì)數(shù)器計(jì)算脈沖到達(dá)待測目標(biāo)并返回的往返時(shí)間,結(jié)合光的速度進(jìn)一步計(jì)算得出物體和目標(biāo)之間的距離。因?yàn)榧す饷}沖的能量相對(duì)集中,因此脈沖式激光雷達(dá)的傳輸距離可以達(dá)到很遠(yuǎn),可以從幾十米到幾萬米。
相位式激光雷達(dá)的工作原理是利用調(diào)諧和差頻測相等相關(guān)技術(shù),通過測量發(fā)射光束和從待測目標(biāo)反射回光束二者的相位差,該相位差包含了待測距離的相關(guān)信息,利用相位差來實(shí)現(xiàn)對(duì)目標(biāo)距離的測量。相位式激光雷達(dá)在使用時(shí)需要在待測目標(biāo)上安裝激光反射器,即需要有合作目標(biāo),且影響其測量精度的因素較多,包括有大氣溫度、濕度、調(diào)諧頻率、氣壓、光發(fā)射功率、穩(wěn)定性參數(shù)等等,相位式激光雷達(dá)的傳輸距離只能從幾米到幾十米。
3 激光雷達(dá)成像系統(tǒng)設(shè)計(jì)
和相位式激光雷達(dá)相比,脈沖型激光雷達(dá)具有可測量距離更長,測距速度快,工作時(shí)不需要合作目標(biāo),隱蔽性好,安全性高等優(yōu)點(diǎn),因此總體方案采用脈沖型激光雷達(dá)結(jié)構(gòu)形式。
3.1 激光發(fā)射光學(xué)系統(tǒng)的設(shè)計(jì)和分析
對(duì)于智能激光雷達(dá)中激光發(fā)射光學(xué)系統(tǒng)的激光器,考慮到激光器發(fā)出的激光通過激光發(fā)射光學(xué)系統(tǒng)的透鏡組和空氣介質(zhì)時(shí)會(huì)有一定的能量損耗,為了保證智能激光雷達(dá)能夠接收到足夠的能量,應(yīng)選擇足夠功率的激光器。考慮車載環(huán)境和實(shí)際應(yīng)用需求,智能駕駛激光雷達(dá)避障光學(xué)成像系統(tǒng)中激光發(fā)射光學(xué)系統(tǒng)的設(shè)計(jì)要求如表1所示。
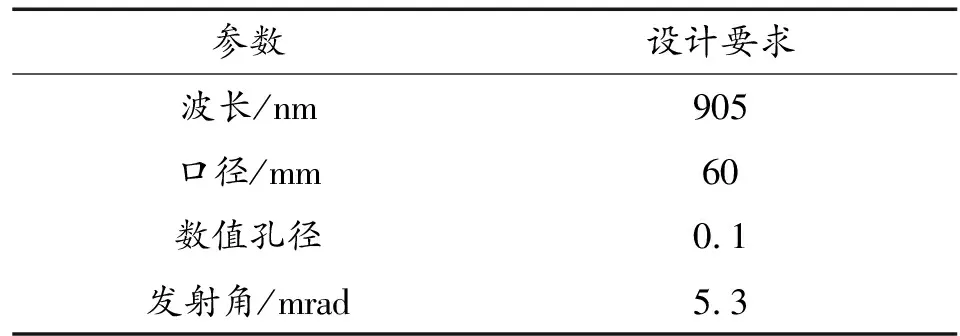
表1 激光發(fā)射光學(xué)系統(tǒng)的設(shè)計(jì)要求
攝遠(yuǎn)光學(xué)結(jié)構(gòu)由一個(gè)正透鏡和一個(gè)遠(yuǎn)離該正透鏡的負(fù)透鏡組成,這種結(jié)構(gòu)形式使得光學(xué)系統(tǒng)的主面向外移動(dòng),可以使得光學(xué)系統(tǒng)的總長小于光學(xué)系統(tǒng)的焦距,使得光學(xué)系統(tǒng)的結(jié)構(gòu)更加緊湊,縮小光路尺寸,因此此處智能激光雷達(dá)的激光發(fā)射光學(xué)系統(tǒng)采用攝遠(yuǎn)光學(xué)結(jié)構(gòu)形式,該系統(tǒng)倒置過來設(shè)計(jì),所設(shè)計(jì)的智能激光雷達(dá)的激光發(fā)射光學(xué)系統(tǒng)結(jié)構(gòu)如圖1所示,激光發(fā)射光學(xué)系統(tǒng)僅由三塊透鏡組成,材料均采用F2光學(xué)材料,為了校正光學(xué)像差,前組的正透鏡最后采用復(fù)雜化的兩片透鏡組成,智能激光雷達(dá)的激光發(fā)射光學(xué)系統(tǒng)的焦距為300 mm,而智能激光雷達(dá)的激光發(fā)射光學(xué)系統(tǒng)的總長僅為186 mm,為焦距的1/1.6。
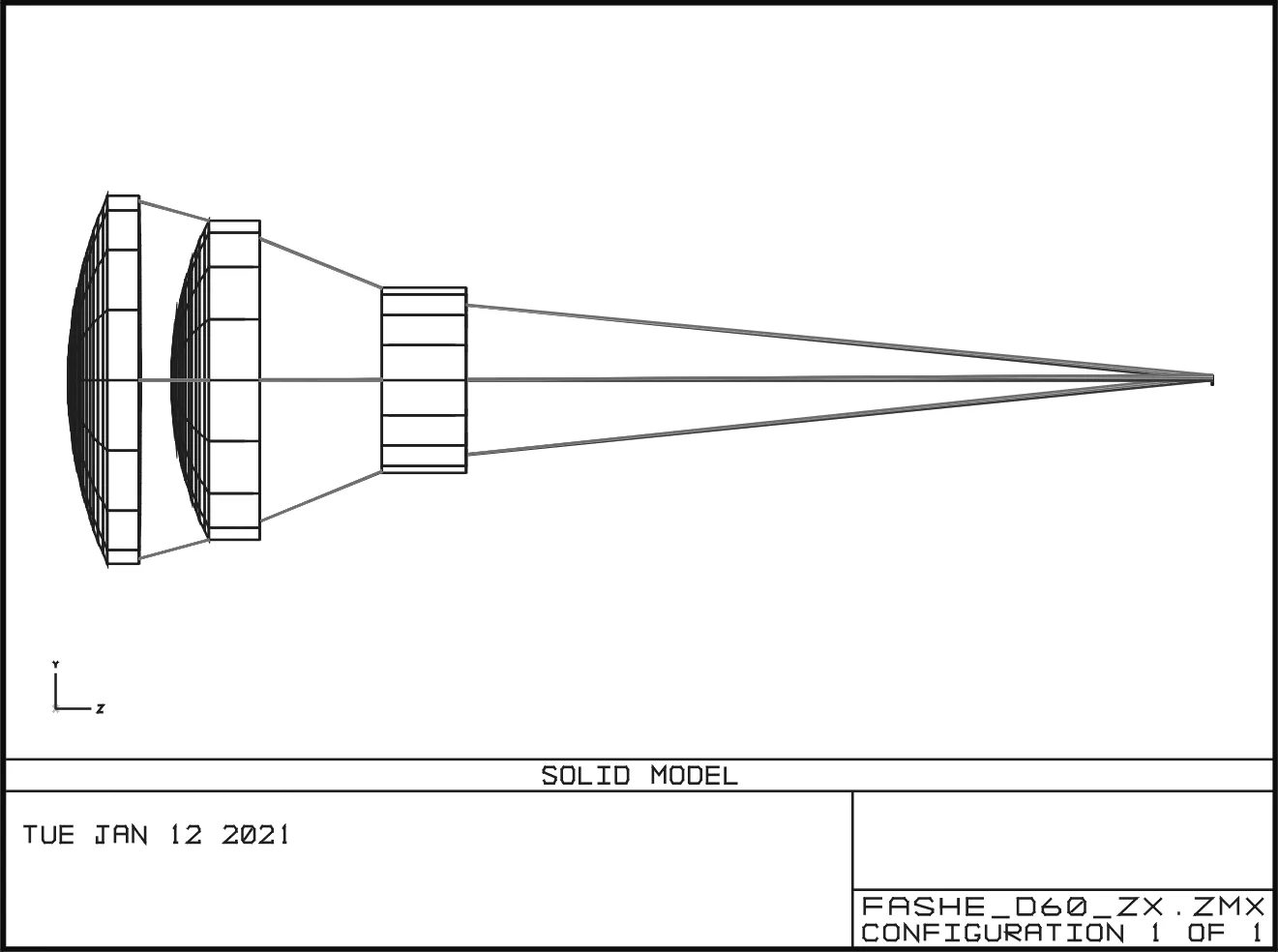
圖1 激光發(fā)射光學(xué)系統(tǒng)結(jié)構(gòu)示意圖
圖2為了智能激光雷達(dá)的激光發(fā)射光學(xué)系統(tǒng)的點(diǎn)列圖,由圖2可知,激光發(fā)射光學(xué)系統(tǒng)的RMS彌散斑半徑最大僅為2.44 μm,5個(gè)視場的彌散斑大小都很小且均勻。
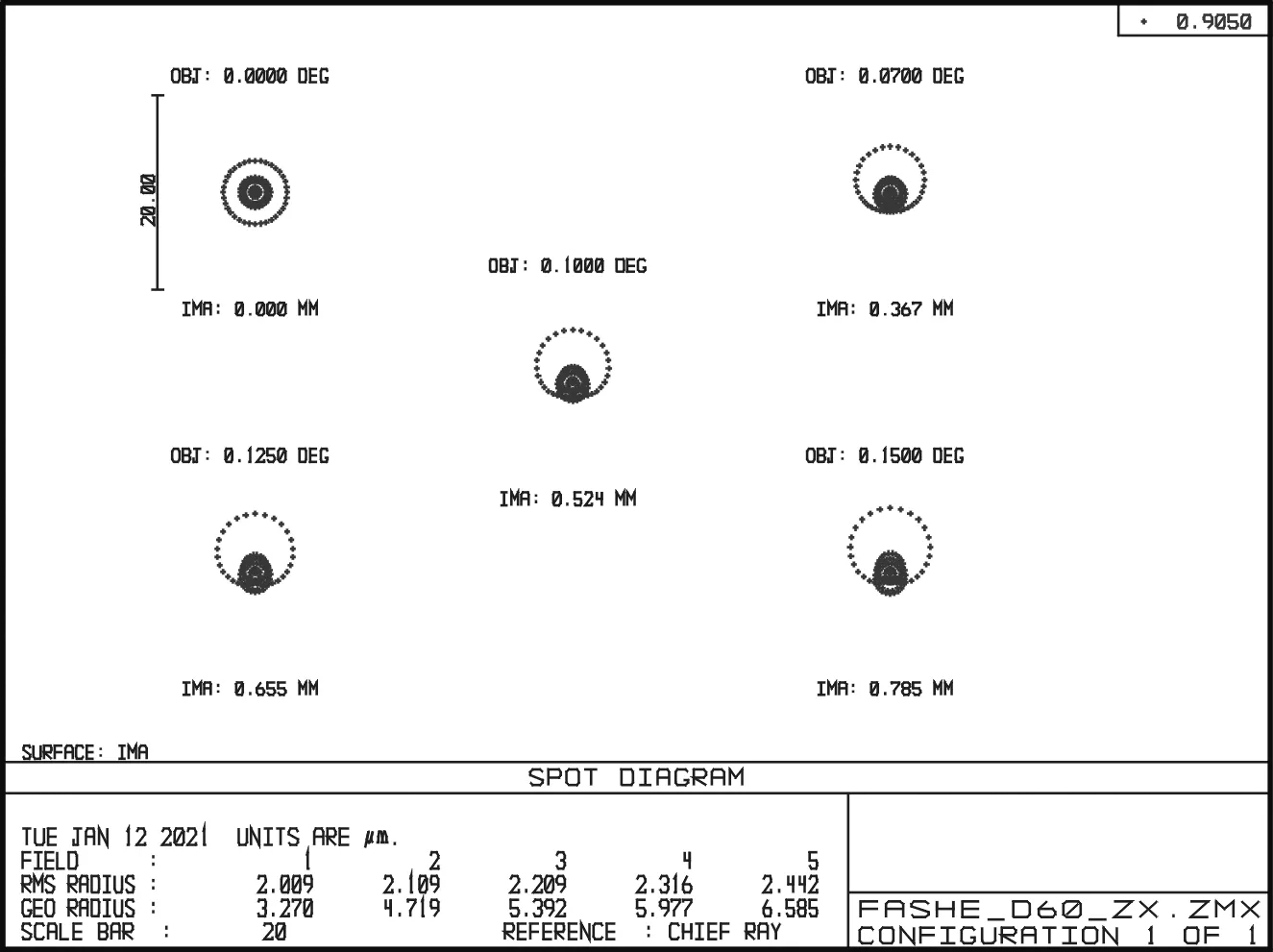
圖2 激光發(fā)射光學(xué)系統(tǒng)點(diǎn)列圖
圖3表示了智能激光雷達(dá)的激光發(fā)射光學(xué)系統(tǒng)的光線像差,左側(cè)為子午像差特性曲線,右側(cè)為弧矢像差特性曲線,由圖3可知,激光發(fā)射光學(xué)系統(tǒng)5個(gè)視場在子午和弧矢方向的光學(xué)像差基本一致,數(shù)值也很小。
圖4表示了智能激光雷達(dá)的激光發(fā)射光學(xué)系統(tǒng)的波像差,由圖4可知,激光發(fā)射光學(xué)系統(tǒng)的峰谷值為 0.031λ,滿足瑞利判據(jù)小于λ/4的要求。
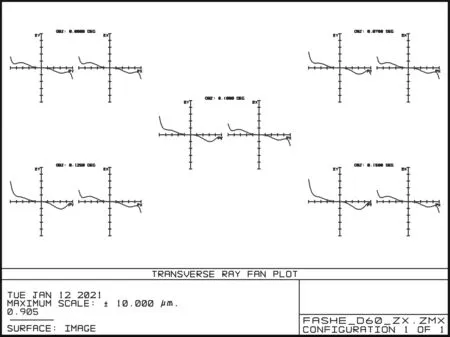
圖3 激光發(fā)射光學(xué)系統(tǒng)的光線像差曲線

圖4 激光發(fā)射光學(xué)系統(tǒng)的波像差圖
圖5表示了智能激光雷達(dá)的激光發(fā)射光學(xué)系統(tǒng)光學(xué)系統(tǒng)的傳遞函數(shù)曲線,由圖5可知,激光發(fā)射光學(xué)系統(tǒng)5個(gè)視場在子午和弧矢方向的傳遞函數(shù)都接近系統(tǒng)的衍射極限。

圖5 激光發(fā)射光學(xué)系統(tǒng)傳遞函數(shù)曲線
3.2 激光接收光學(xué)系統(tǒng)的設(shè)計(jì)和分析
對(duì)于智能激光雷達(dá)中激光接收光學(xué)系統(tǒng)的能量接收器,因?yàn)闇y距時(shí)是按照激光器發(fā)出的激光的來回時(shí)間來評(píng)估距離的,因此選取對(duì)響應(yīng)時(shí)間響應(yīng)更靈敏的光電檢測傳感器。考慮車載環(huán)境和實(shí)際應(yīng)用需求,智能駕駛激光雷達(dá)避障光學(xué)成像系統(tǒng)中激光接收光學(xué)系統(tǒng)的設(shè)計(jì)要求如表2所示。
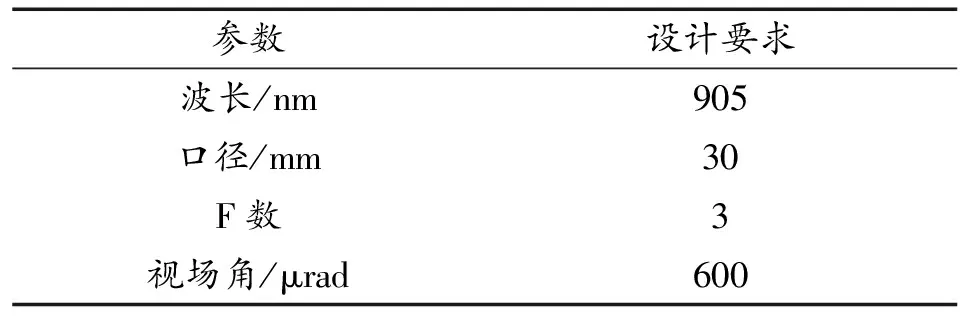
表2 激光接收光學(xué)系統(tǒng)的設(shè)計(jì)要求
為了使得智能激光雷達(dá)的激光接收光學(xué)系統(tǒng)的結(jié)構(gòu)更加緊湊,激光接收光學(xué)系統(tǒng)采用攝遠(yuǎn)光學(xué)結(jié)構(gòu)形式,所設(shè)計(jì)的智能激光雷達(dá)的激光接收光學(xué)系統(tǒng)結(jié)構(gòu)如圖6所示,激光發(fā)射光學(xué)系統(tǒng)僅由兩塊透鏡組成,材料均采用F2光學(xué)材料,智能激光雷達(dá)的激光接收光學(xué)系統(tǒng)的焦距為150 mm,而智能激光雷達(dá)的激光接收光學(xué)系統(tǒng)的總長僅為126 mm,為焦距的1/1.2。
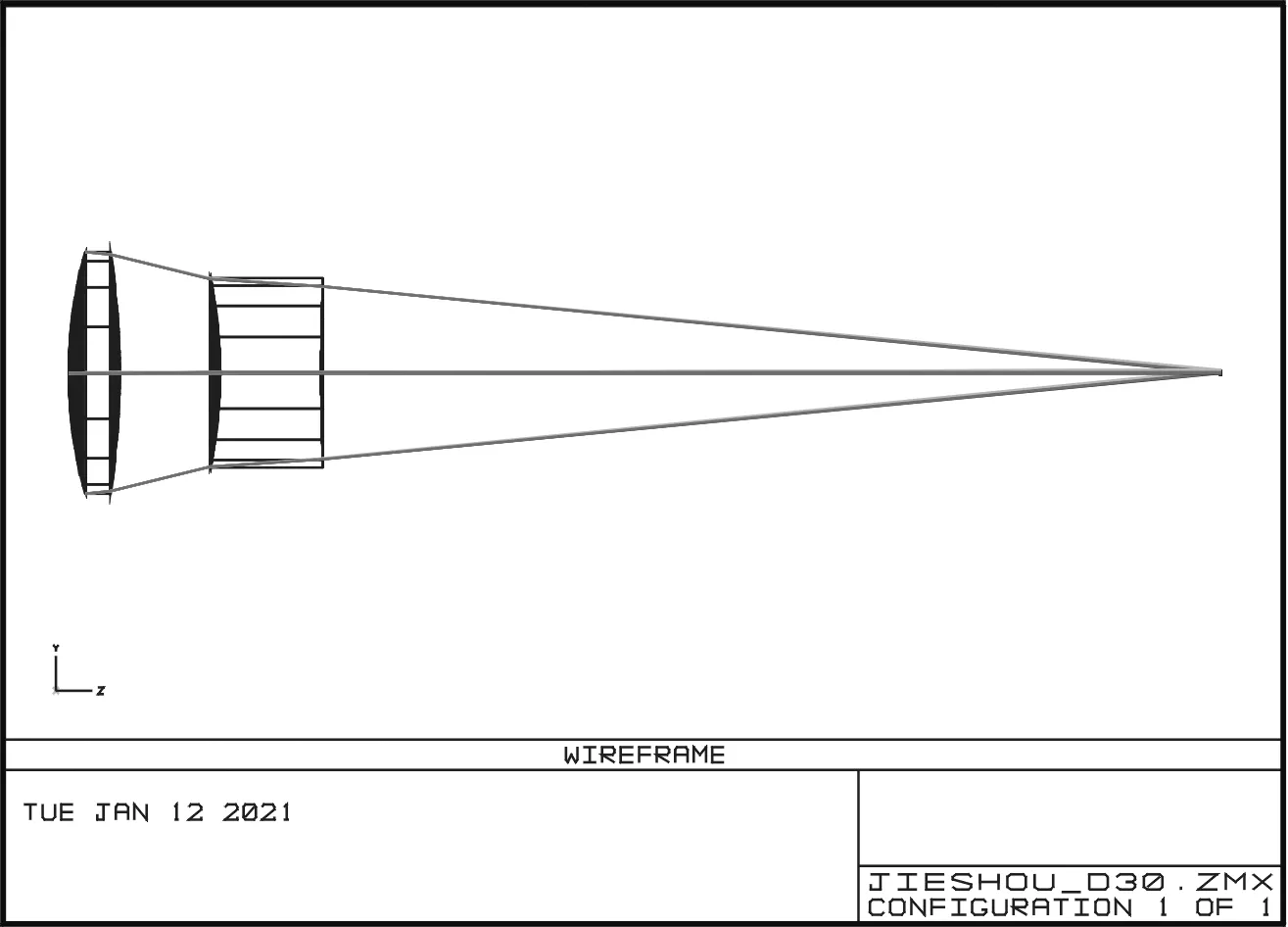
圖6 激光接收光學(xué)系統(tǒng)結(jié)構(gòu)示意圖
圖7~圖10給出了智能激光雷達(dá)的激光發(fā)射光學(xué)系統(tǒng)光學(xué)系統(tǒng)的傳遞函數(shù)曲線,光線像差曲線,點(diǎn)列圖,徑向能量曲線。由圖可知,激光接收光學(xué)系統(tǒng)5個(gè)視場在子午和弧矢方向的傳遞函數(shù)都接近系統(tǒng)的衍射極限,光線像差曲線平緩,最大的RMS彌散斑半徑僅為1.11 μm,在10 μm的圓域范圍內(nèi)所有視場的能量都優(yōu)于80%,取得很好成像性能。
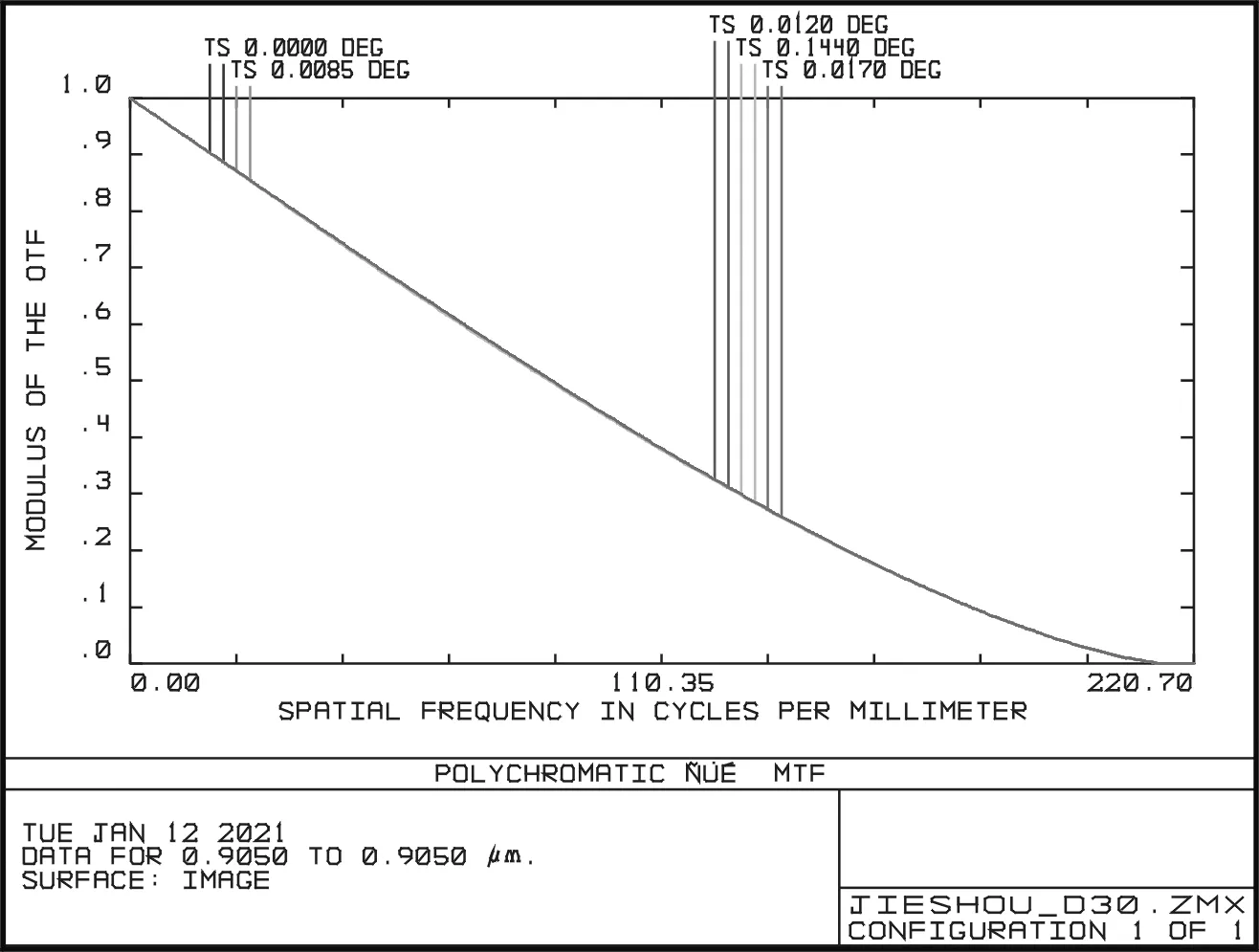
圖7 激光接收光學(xué)系統(tǒng)傳遞函數(shù)曲線
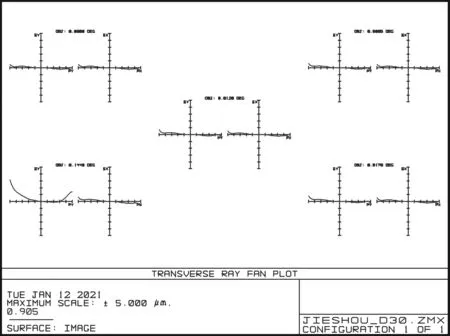
圖8 激光接收光學(xué)系統(tǒng)的光線像差曲線
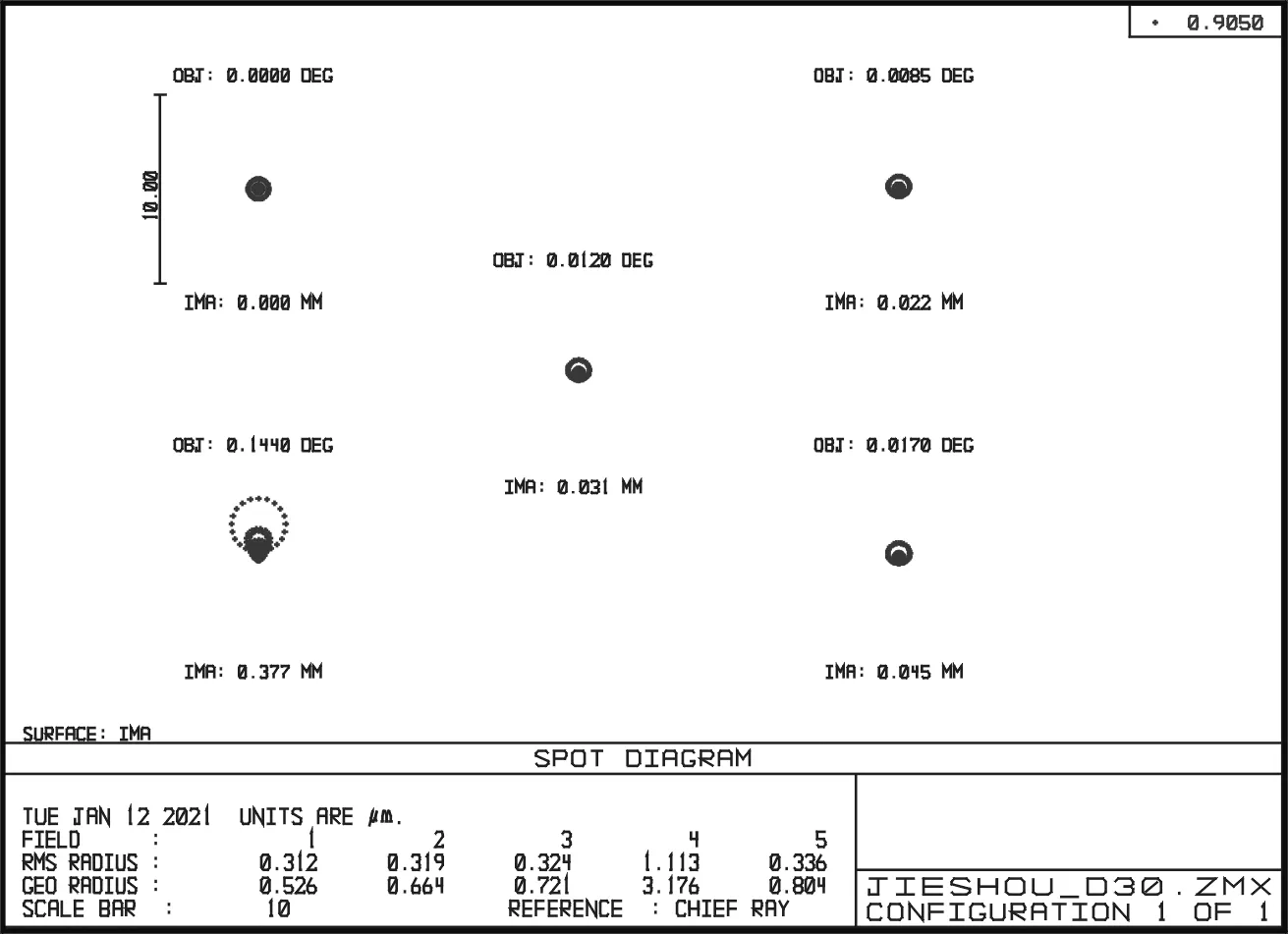
圖9 激光接收光學(xué)系統(tǒng)的點(diǎn)列圖
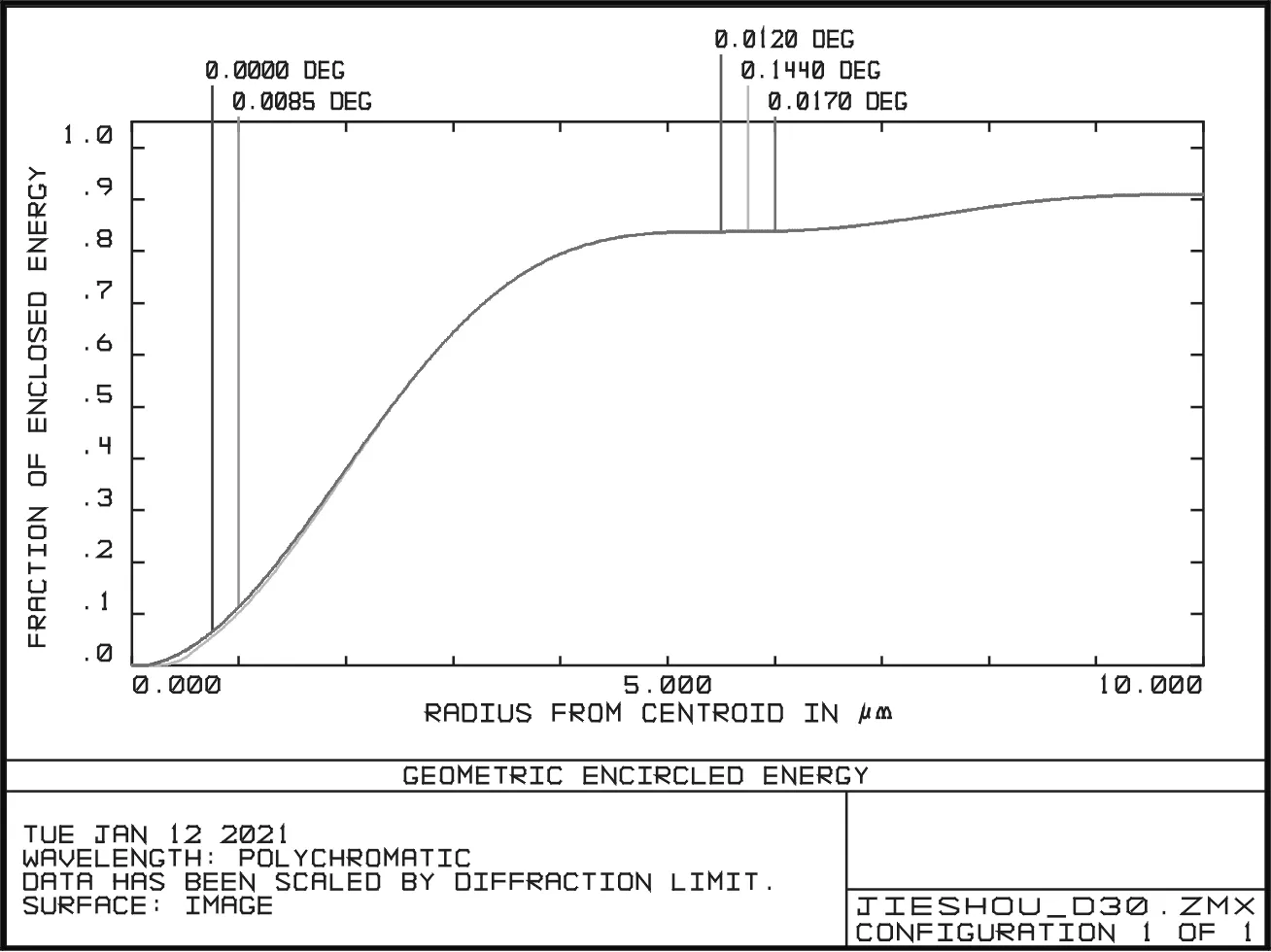
圖10 激光接收光學(xué)系統(tǒng)的徑向能量曲線
4 結(jié)論
本文深入研究分析了智能駕駛激光雷達(dá)系統(tǒng)的實(shí)現(xiàn)原理,考慮了車載環(huán)境和實(shí)際應(yīng)用需求,考慮脈沖型激光雷達(dá)具有可測量距離更長,測距速度快,工作時(shí)不需要合作目標(biāo),隱蔽性好,安全性高等優(yōu)點(diǎn),采用脈沖型激光雷達(dá)結(jié)構(gòu)形式,設(shè)計(jì)了一種智能駕駛激光雷達(dá)避障光學(xué)成像系統(tǒng),根據(jù)智能駕駛激光雷達(dá)系統(tǒng)的整體結(jié)構(gòu),選取適合系統(tǒng)需求的激光器和光電探測器,確定了智能駕駛激光雷達(dá)發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng)的參數(shù)要求,應(yīng)用 ZEMAX 光學(xué)仿真設(shè)計(jì)分析軟件完成了兩個(gè)光學(xué)系統(tǒng)的優(yōu)化設(shè)計(jì)和成像性能分析,仿真分析結(jié)果表明,智能駕駛激光雷達(dá)發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng)滿足系統(tǒng)整體的設(shè)計(jì)目標(biāo)要求。隨著人工智能,計(jì)算機(jī)視覺,機(jī)器視覺,大數(shù)據(jù)等新技術(shù)的發(fā)展,可以在智能駕駛激光雷達(dá)光學(xué)成像系統(tǒng)中引入這些新技術(shù)對(duì)避障物體進(jìn)行智能識(shí)別探測,對(duì)汽車進(jìn)行智能控制。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17