基于GNSS的物流信息跟蹤系統設計
2021-12-04 03:44:32尹海博
導航定位學報 2021年6期
尹海博,徐 熊,郭 杭
基于GNSS的物流信息跟蹤系統設計
尹海博1,2,徐 熊2,郭 杭1,2
(1. 南昌大學空間科學與技術研究院,南昌 330031;2. 南昌大學信息工程學院,南昌 330031)
針對現代生活中快遞在運輸過程中出現的丟失、損壞,客戶對重要包裹在運送途中的擔心等問題,提出一種基于全球衛星導航系統(GNSS)的物流信息跟蹤系統設計。基于嵌入式實時操作系統,以STM32L151RCT6單片機為主控模塊,驅動傳感部分(GNSS位置傳感器、溫濕度傳感器、加速度傳感器)采集包裹的各項物流信息,并通過窄帶物聯網(NB-IoT)通信將物流信息傳輸至快遞公司的物聯網云平臺;用戶通過Web網頁即可查詢包裹的物流信息,包括精確位置、溫濕度、運動狀態等。測試結果表明,該系統能夠完成對包裹信息的跟蹤和穩定上傳,其定位跟蹤精度在2.5 m以內,能夠實現對快遞包裹的集中化、規模化管理。
物流跟蹤;窄帶物聯網通信;全球衛星導航系統;單片機;嵌入式實時操作系統
0 引言
全球衛星導航系統(global navigation satellite system, GNSS)是能在地球表面或近地空間的任何地點為用戶提供全天候的三維坐標和速度以及時間信息的空間無線電導航定位系統[1],正廣泛應用于交通、測繪、大地測量、氣象預報等領域,已經成為人們正常生活中不可缺少的一部分。高德地圖、餓了么、滴滴打車、去哪兒等與人們生活息息相關的軟件都在使用衛星導航定位技術[2]。
隨著交通運輸行業和電子商業的蓬勃發展,快遞運輸的普及度越來越高,快遞運輸在帶來便利的同時也存在缺陷[3]。包裹在運送過程可能存在丟失、損壞等問題,不僅對用戶產生損失,同時對快遞公司的正常運轉也產生了很大的影響。對于重要包裹的丟失、損壞,顯然是快遞公司和用戶雙方都不愿發生的事情。
文獻[4]利用差分全球定位系統(differential global positioning system,DGPS)和電子感應技術,設計了魚雷罐車定位跟蹤系統,能有效地把魚雷罐車的各種信息都匯總起來。文獻[5]以ATmega128A單片機和MPU6050位核心器件,設計了基于北斗衛星導航系統(BeiDou navigation satellite system, BDS)衛星的定位與跟蹤系統,利用卡爾曼濾波算法來優化外界對目標定位跟蹤的干擾。文獻[6]基于全球定位系統(global positioning system, GPS)衛星及BDS衛星,設計了一款針對移動目標的高精度定位與跟蹤系統,由ATGM331模塊實現GNSS定位,系統主要包括核心處理單元、全球移動通信網絡(global system for mobile communication, GSM)、地理信息系統(geographic information system, GIS)。
針對包裹在運輸過程中出現的問題,本文提出一種基于GNSS的物流信息跟蹤系統。該系統是將衛星導航定位技術、物聯網通信融為一體的嵌入式系統,能夠實現對包裹的定位跟蹤與狀態監測,可以有效解決包裹丟失與損壞的問題,降低用戶與快遞公司的損失,為解決用戶與快遞公司之間的利益糾紛提供途徑。
1 總體方案
總體方案如圖1所示。該系統由主控芯片、傳感部分、GNSS定位模塊、電源模塊、一維碼掃描器、有機發光二極管(organic light-emitting diode, OLED)顯示屏、按鍵等組成。主控模塊選用STM32L151RCT6芯片,負責控制和驅動整個系統的運行。傳感部分由MPU6050運動狀態傳感器、DHT11溫濕度傳感器、DS18B20溫度傳感器組成,實時采集包裹的運動狀態、溫濕度信息。一維碼掃描器完成包裹與物流信息跟蹤系統的綁定,綁定之后系統開始實時跟蹤該包裹。OLED顯示屏對物流信息進行實時顯示。供電模塊為鋰電池充放電電路,為系統提供3.3 V的工作電壓。GNSS定位模塊選用移遠通信公司研發的BC20模塊,完成對包裹的實時定位和窄帶物聯網(narrow band internet of things, NB-IoT)通信。
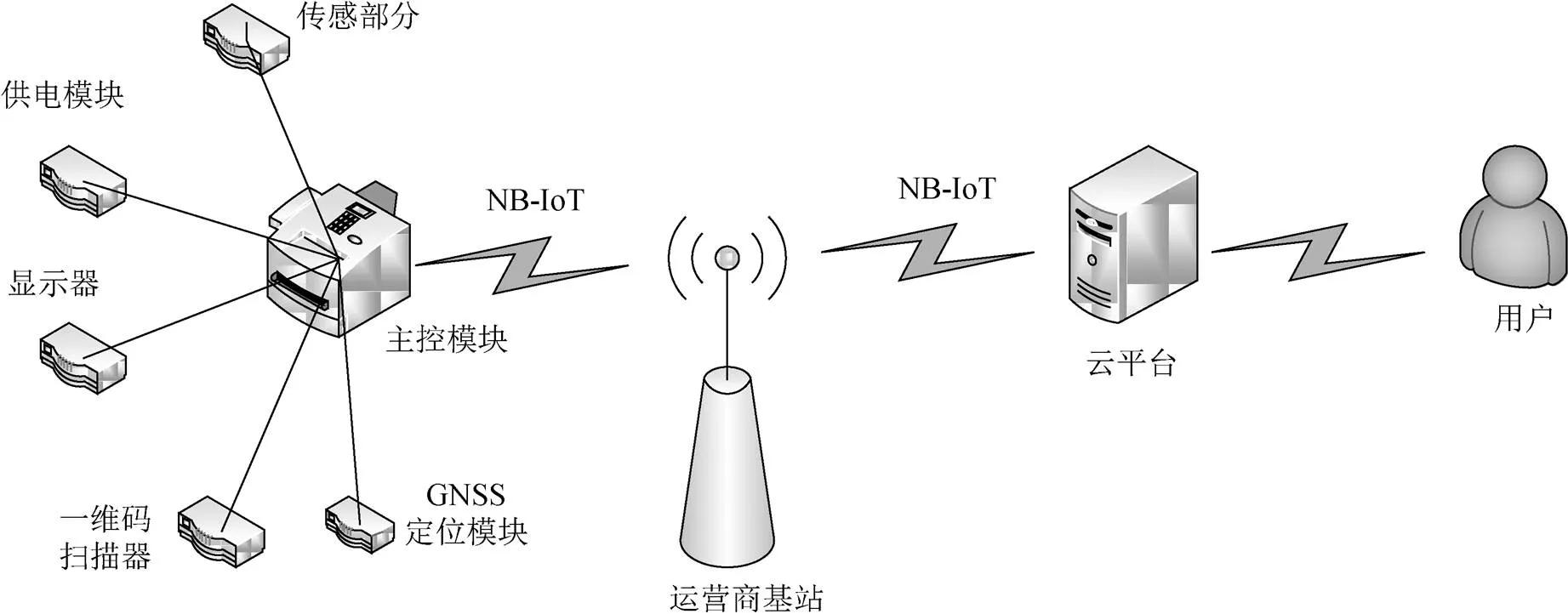
圖1 總體示意圖
2 系統硬件電路設計
1)主控模塊電路設計。圖2為主控制器電路,包括時鐘電路、復位電路、電源電路、下載電路,是處理器正常運行的必要條件[7]。時鐘電路、復位電路和電源電路構成的系統也稱為單片機最小系統,下載電路用于給主控芯片燒錄程序。主控制器采用3.3 V的供電。連接STM32-OSC-IN和STM32-OSC-OUT引腳的為時鐘電路,由8 MHz的晶振、兩個22 pF的電容、1 MΩ的電阻組成,為處理器提供時鐘信號。與STM32-NRST引腳相連接的為復位電路,復位電路由10 kΩ的電阻、按鍵、電容組成。程序下載電路主要由串行線時鐘(serial wire clock, SWCLK)接口和串行線數據(serial wire data, SWDAT)接口組成,其中VCC(volt current condenser)為電源端,GND(ground)為接地端。
2)電平轉換電路設計。BC20模塊與微處理器通過串口進行數據通信,由于BC20與微處理器接口協議里面定義的電平不同,這里使用TXB0104芯片設計電平轉換接口(圖3),它是一款帶自動方向檢測和靜電釋放(elestro-static discharge, ESD)保護功能的雙向電壓電平轉換器[8],A端口支持1.2~3.6 V電壓,B端口支持1.65~5.5 V電壓,A端電壓不得大于B端。當輸出使能端(output enable,OE)輸入為低電平時,所有輸出均處于高阻抗狀態。為確保在上電或掉電期間均處于高阻抗狀態,必須將OE通過下拉電阻接地。驅動器的拉電流能力決定該電阻的最小值[9]。該芯片被設計成OE輸入電路由模擬電源(volt current condenser analog,VCCA)供電。將BC20模塊的主串口和調試(debug,DBG)串口同時連接到TXB0104電平轉換器,其中DBG串口連接A1、A2引腳,主串口連接A3、A4引腳,將STM32微處理器的PB11、PB10引腳與TXB0104芯片的B1、B2引腳連接,PA2、PA3與B3、B4連接。
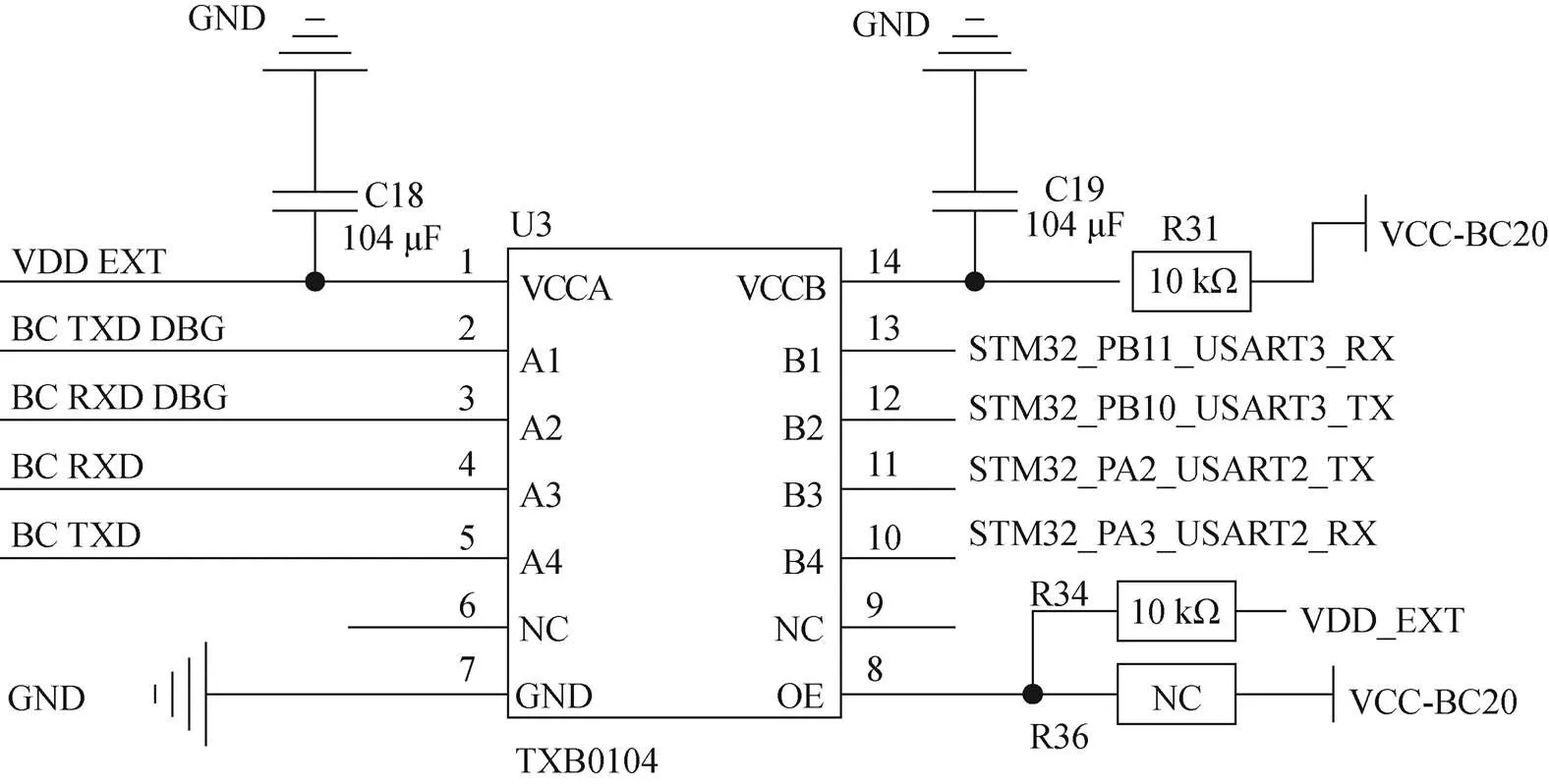
圖3 TXB0104電平轉換電路
3)傳感電路設計。本系統涉及到的傳感器分別為溫度傳感器DS18B20、濕度傳感器DHT11、六軸運動傳感器MPU6050。DS18B20的數據傳輸接口與STM32單片機的PB4相連接,測溫范圍為-55~+125℃,測溫分辨率達0.5℃。DHT11的數據傳輸接口與STM32的PB5連接,濕度測量范圍為20%~90%相對濕度(relative humidity, RH),工作電壓3.3~5.5 V直流。MPU6050運動傳感器與STM32之間通過集成電路總線(inter-integrated circuit,IIC)通信協議進行數據傳輸,其中SCL(system clock line)為系統時鐘線,SDA(serial data line)為串行數據線。MPU-6000可在(2.5± 2.5×5%)V、(3.0±3.0×5%)V或(3.3±3.3×5%)V這3種供電電壓下工作。傳感器電路設計的原理圖如圖4所示。
4)電源電路設計。圖5是鋰電池充電電路,由TP4056、電阻、發光二極管、電容組成,其中BAT(battery terminal)為電源終端,CE(chip enable)為芯片使能輸入端。TP4056是單節鋰離子電池,采用恒定電流電壓線性充電器,充電電壓固定于
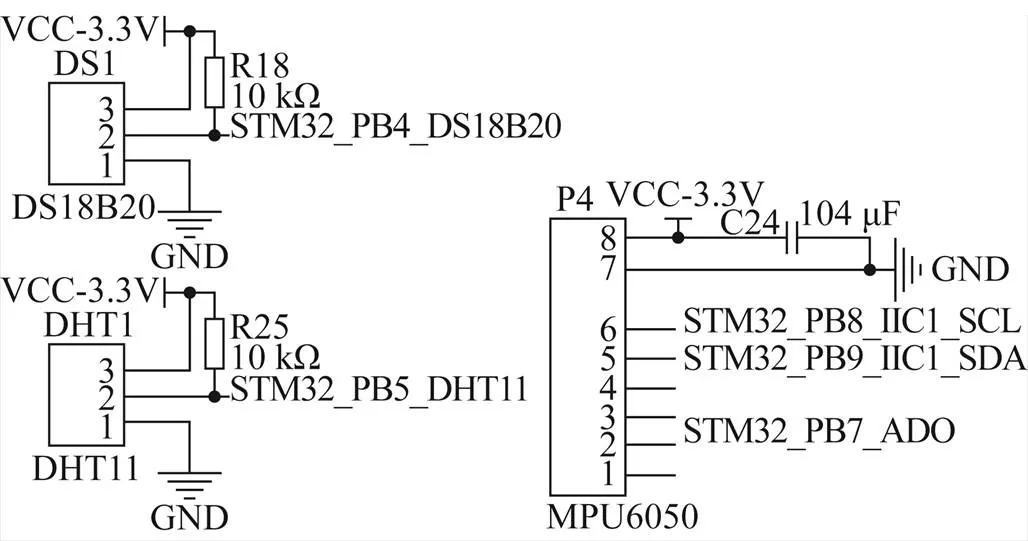
圖4 傳感器電路設計
4.2 V,而充電電流可通過一個電阻器進行外部設置,當充電電流達到最終浮充電壓之后降至設定值1/10時[10],TP4056將自動終止充電循環;當輸入電壓被拿掉時,TP4056自動進入一個低電流狀態,將電池漏電流降至2 μA以下。圖6為鋰電池放電電路,將4.2 V的電壓經過濾波、整流、降壓變成3.3 V的直流電壓。當開關S1接通時,4.2 V的電壓輸出,從EN(enable)引腳輸入到RT2。C9、C11為濾波電容,R4、R11、R17為分壓電阻。電感的作用為“通直流、阻交流”,二極管起保護電路的作用。

圖5 鋰電池充電電路設計
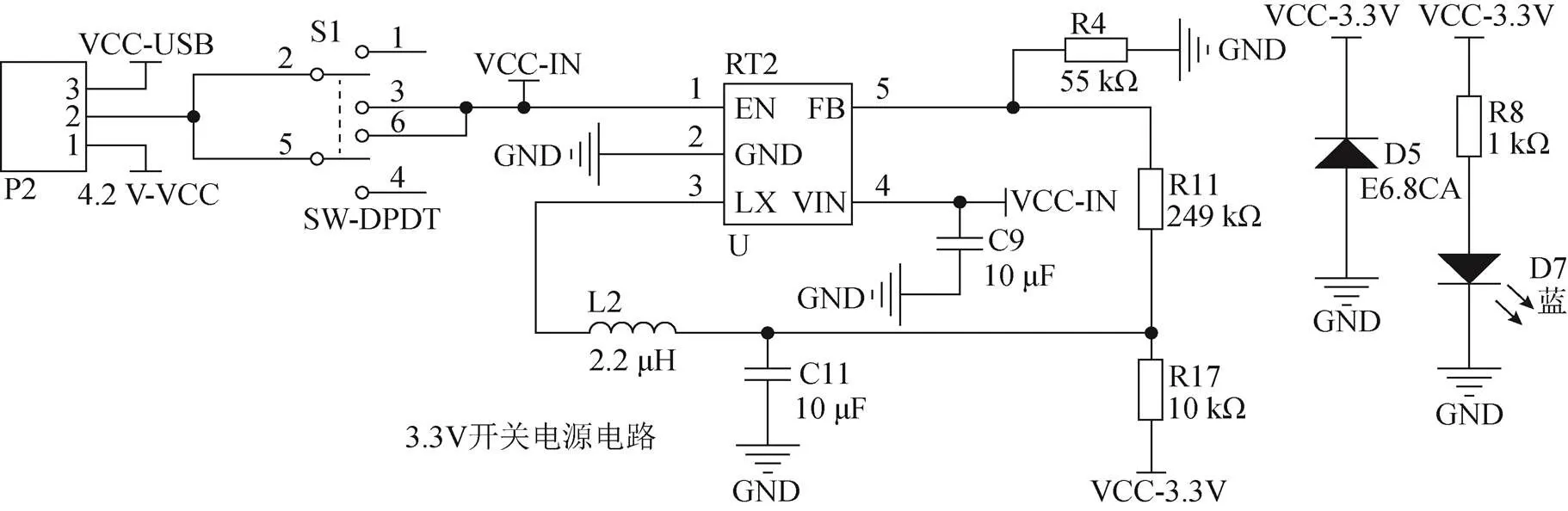
圖6 鋰電池放電電路設計
3 系統軟件設計
3.1 主程序設計
軟件設計是基于開源實時操作系統(free real-time operating system, FreeRTOS),作為一個輕量級的操作系統,功能包括:任務管理、時間管理、信號量、消息隊列、內存管理、記錄功能等,任務調度機制是其核心技術,調用開始任務函數,即可開始所有任務(子程序),實現任務同步進行。主程序流程如圖7所示,進入主程序,先對串口、定時器、延時函數、中斷優先級等進行初始化設置,隨即獲取BC20窄帶物聯網模塊接收的命令,識別包括鑒權應答、綁定/解除綁定設備、喚醒設備、數據上傳等在內的8個命令,通過判斷Comd和Clock1-flag的當前值來識別BC20模塊接收到的指令,從而完成相應的操作。
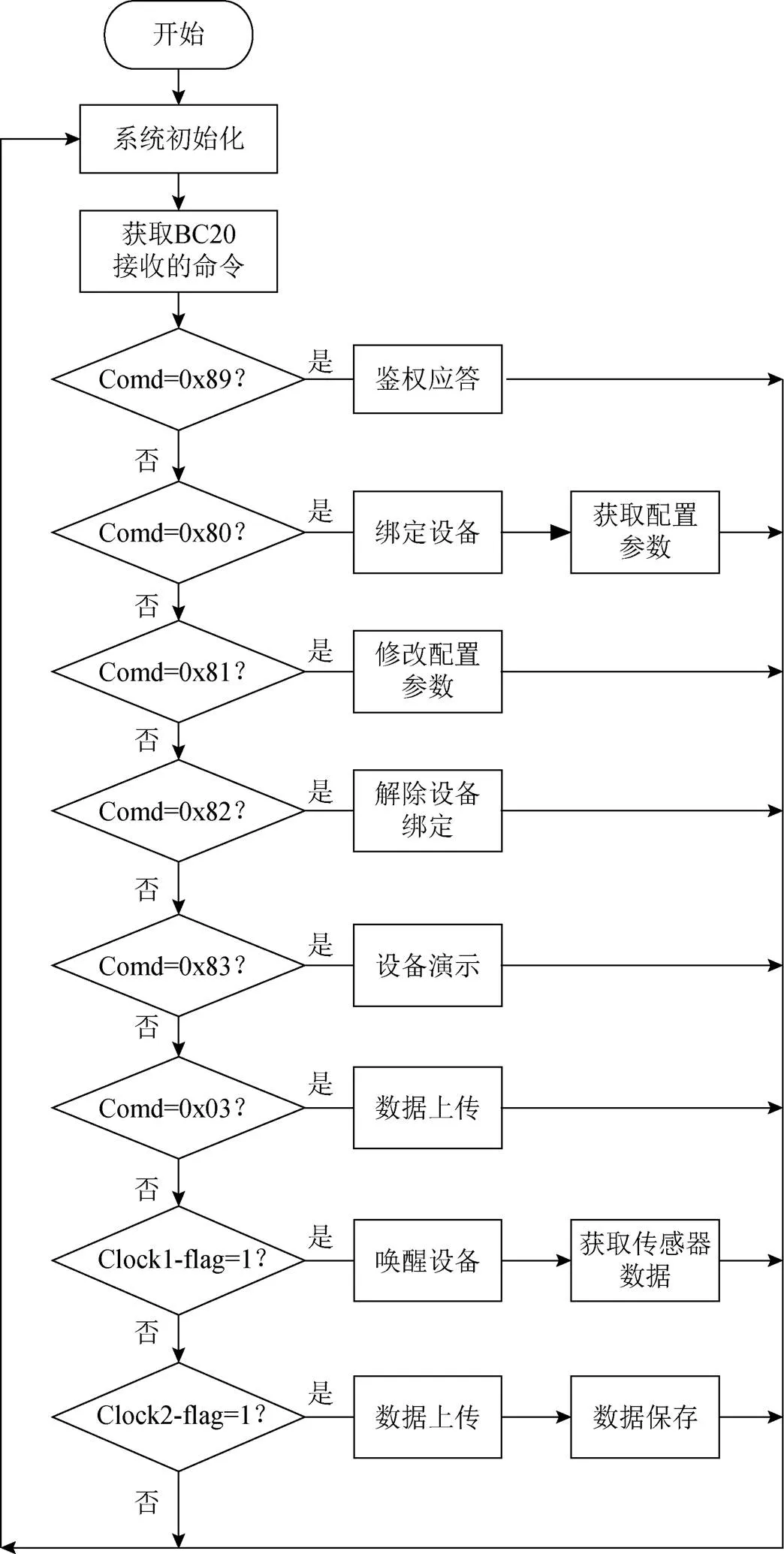
圖7 主程序流程
3.2 定位模塊程序設計
BC20定位使用輔助全球定位系統(assisted global positioning system,AGPS)技術。AGPS是由外界提供接收機信號捕獲與定位所需信息數據的方式和技術,通過獲取遠程服務器上的星歷數據,終端將獲取到的輔助數據注入到GNSS芯片中,提高定位的速度。先對BC20模塊進行初始化,如串口通信波特率的設置。初始化完之后,單片機發送AT+QGNSSC=1命令開啟GNSS功能,開始進行定位工作,確認網絡連接,網絡連接正常后,通過AT+QGNSSAGPS=1命令使能AGPS,BC20開始從遠程服務器處獲取星歷數據、偏差改正參數等,聯合進行定位。部分應用于終端設備與PC應用之間的連接與通信指令(AT指令)及其含義如表1。最后,通過DBG串口將美國國家海洋電子協會(National Marine Electronics Association, NMEA)統一的GPS協議格式的數據打包傳輸給STM32單片機。圖8為定位子程序流程圖。
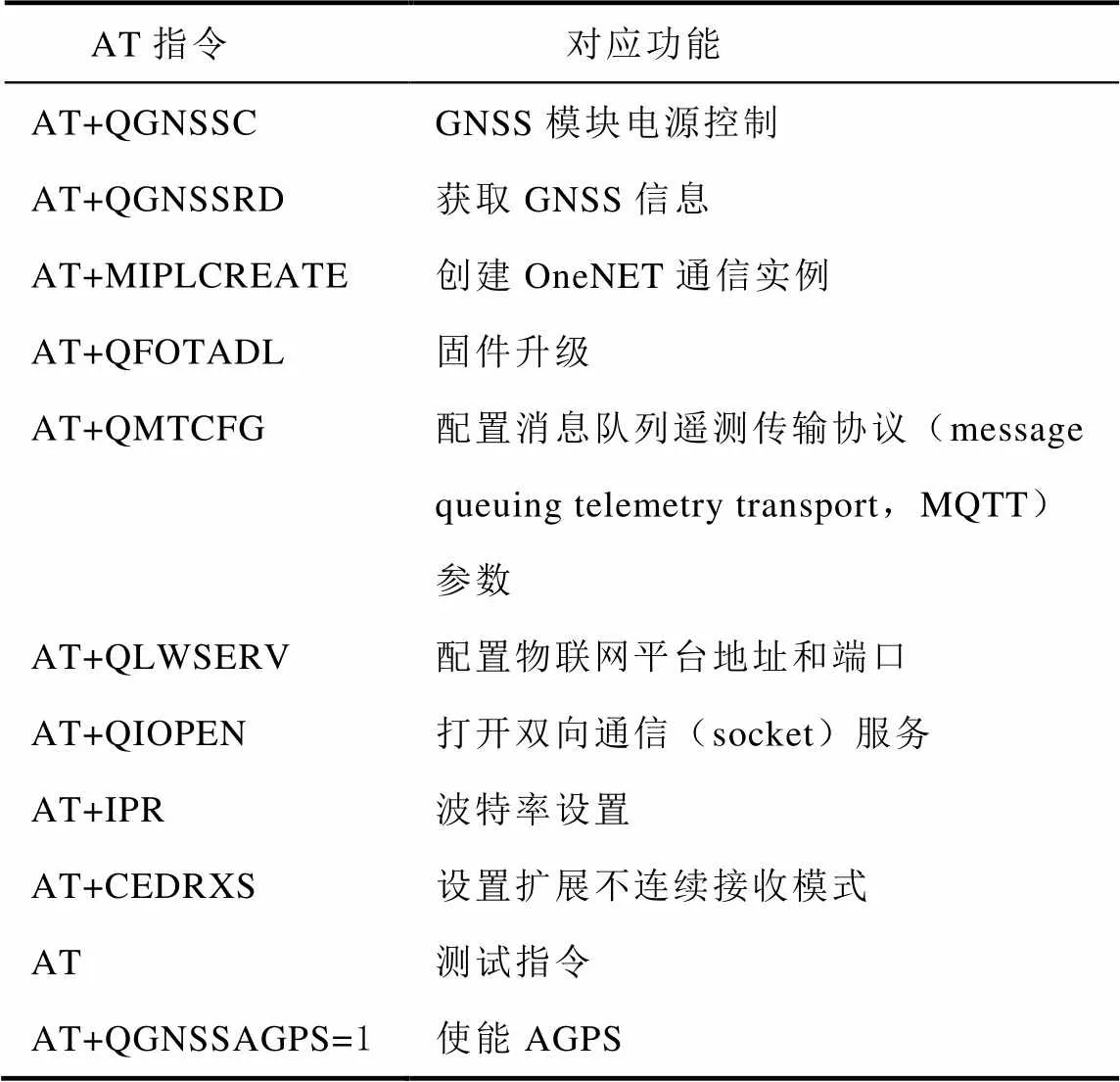
表1 BC20模塊部分AT指令及對應功能
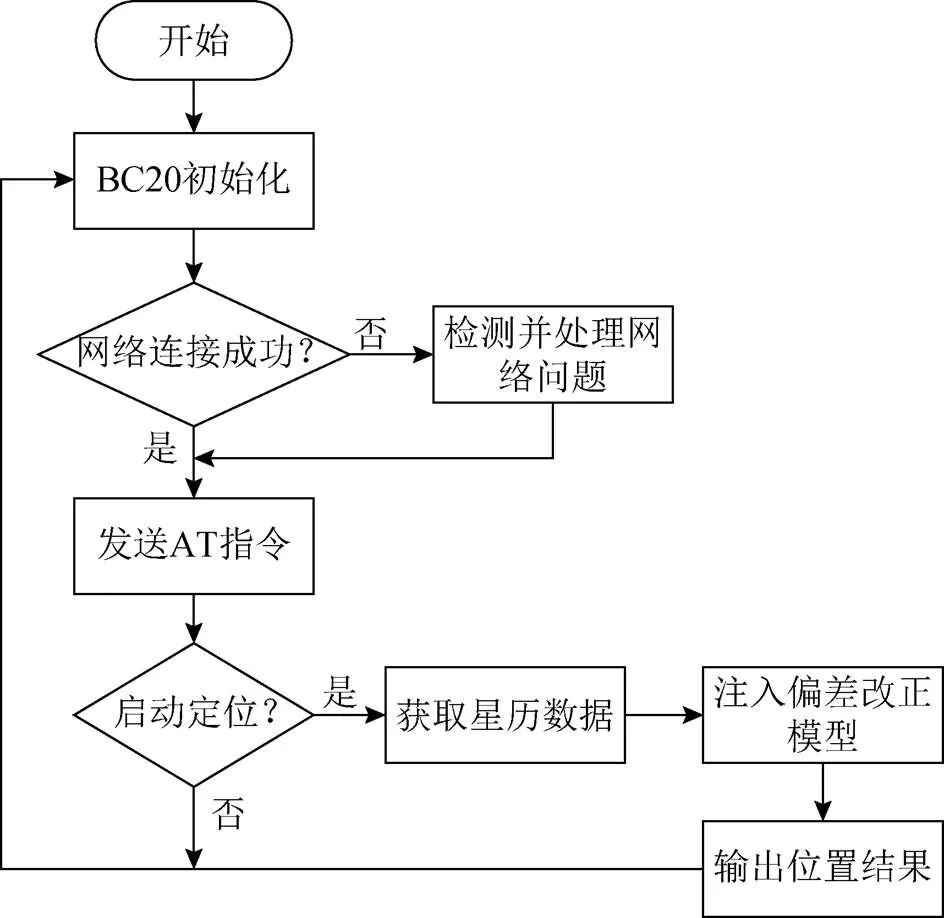
圖8 GNSS定位程序流程
3.3 NB-IoT通信模塊程序設計
圖9為NB-IoT通信子程序流程圖。本系統中的NB-IoT通信集成在BC20模塊上,BC20模塊支持標準的NMEA0183協議,其協議格式如表2。NB-IoT有3種工作模式:省電模式、不連續接收模式、擴展不連續接收模式。考慮本系統定位的實時性,所以選用實時性較好的不連續接收工作模式[11]。該模式的周期為1.28 s,其間包括連接(Connect)和空閑(IDLE)2個狀態的切換。用戶在IDLE狀態時,每個不連續接收周期監聽一次尋呼信道,檢查是否有下行業務到達[12-13]。若有,則觸發用戶設備建立空口連接,然后再轉發下行數據包,主控制器可通過AT命令喚醒NB-IoT模塊向云服務器發送數據。
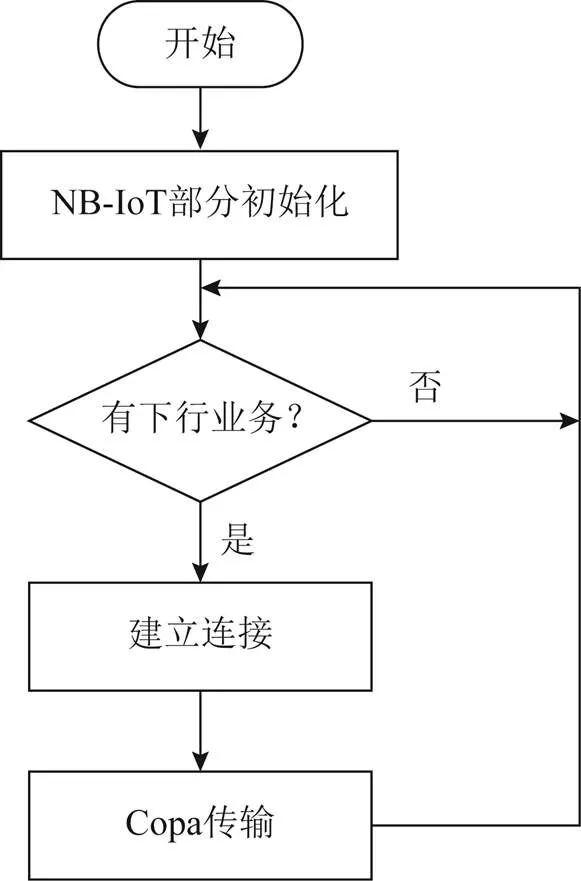
圖9 NB-IoT通信流程圖
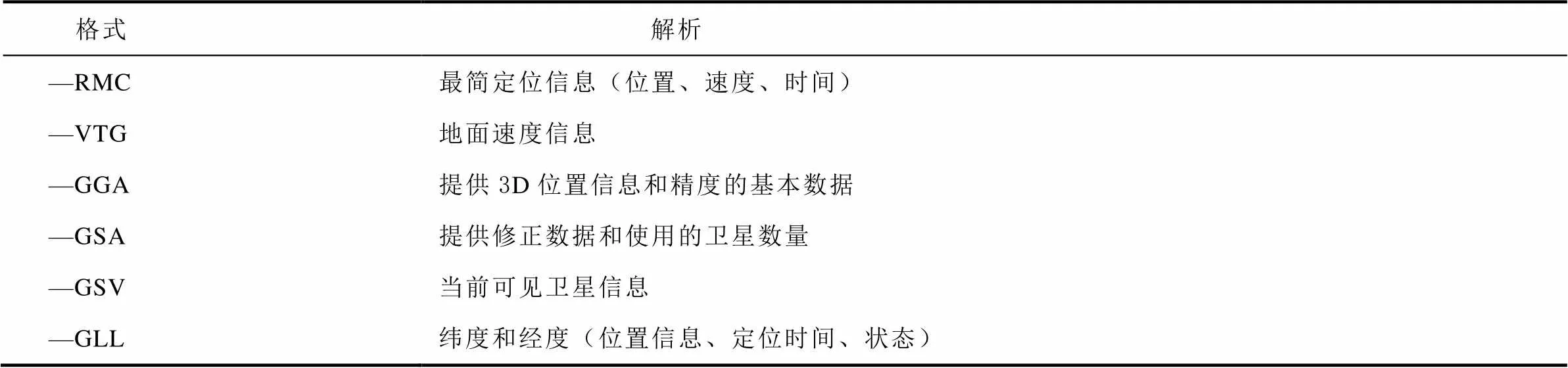
表2 NMEA數據包協議
3.4 用戶端網頁設計
物流信息查詢網頁的設計分為用戶和管理員兩部分。首次登錄的用戶需要注冊,登錄后界面會顯示多個包裹的物流信息,用戶輸入訂單號即可查詢到自己的包裹信息。對于已經簽收的包裹,管理員可以對包裹信息進行手動刪除。網頁設計內容如圖10所示。
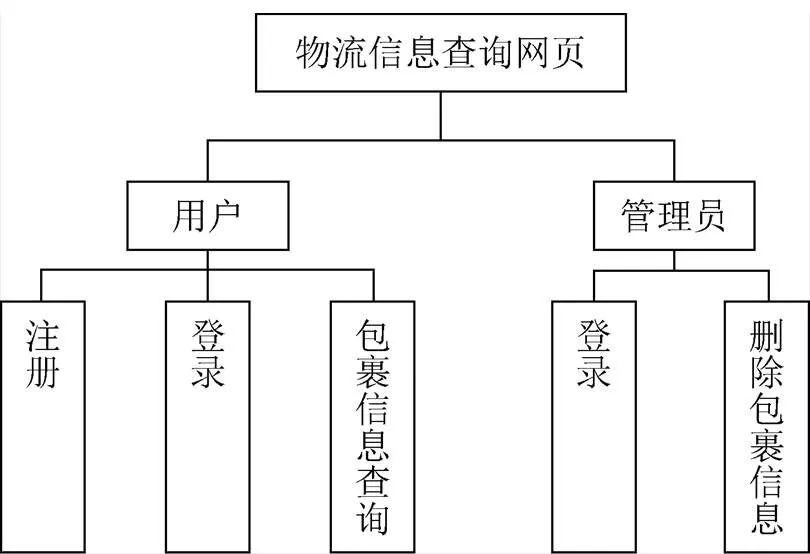
圖10 網頁功能設計
4 系統調試
首先,將終端設備與物聯網云平臺進行對接。步驟分為設置終端設備標識號(identification,ID)、需要對接物聯網平臺的地址與端口號、頻段、核心網(access point name,APN)、終端入網;查詢終端是否獲取到核心網分配的互聯網協議(internet protocol,IP)地址[14-15],如果獲取到IP地址,表示終端入網成功,對接完成。然后,手持設備進行測試,用電腦端打開web網頁,查詢設備信息。
圖11為物流跟蹤系統成品。圖12為物流公司的物聯網云平臺展示的數據,包括包裹的寄出時間、溫濕度情況、震動情況、經緯度信息以及終端的電量情況等。其中,2019年起為調試過程中所測得到的數據,其經緯度符合當時快遞所在區域,震動情況、溫度、電量等也都正常,當電量過低時,發出了相應的警告標志。但是出現了3次溫度為0的情況,考慮可能是因為監測儀震動導致DS18B20與STM32接觸不良,STM32無法穩定獲取到溫度數據。將DS18B20傳感器重新與STM32焊接,重新調試,測試結果如圖12中2020年所示,溫度、震動情況、經緯度全都在正常范圍內,能夠完成對快遞包裹的穩定跟蹤。

圖11 物流跟蹤系統

圖12 物流信息展示
經過多個經緯度數據計算,得出3個方向的位置誤差在2.5 m以內。東北天3個方向的偏差曲線如圖13所示,定位結果較為準確,滿足對包裹位置跟蹤的要求。測試表明,該系統基本能夠完成運送過程中對物流信息的穩定跟蹤和數據上傳。
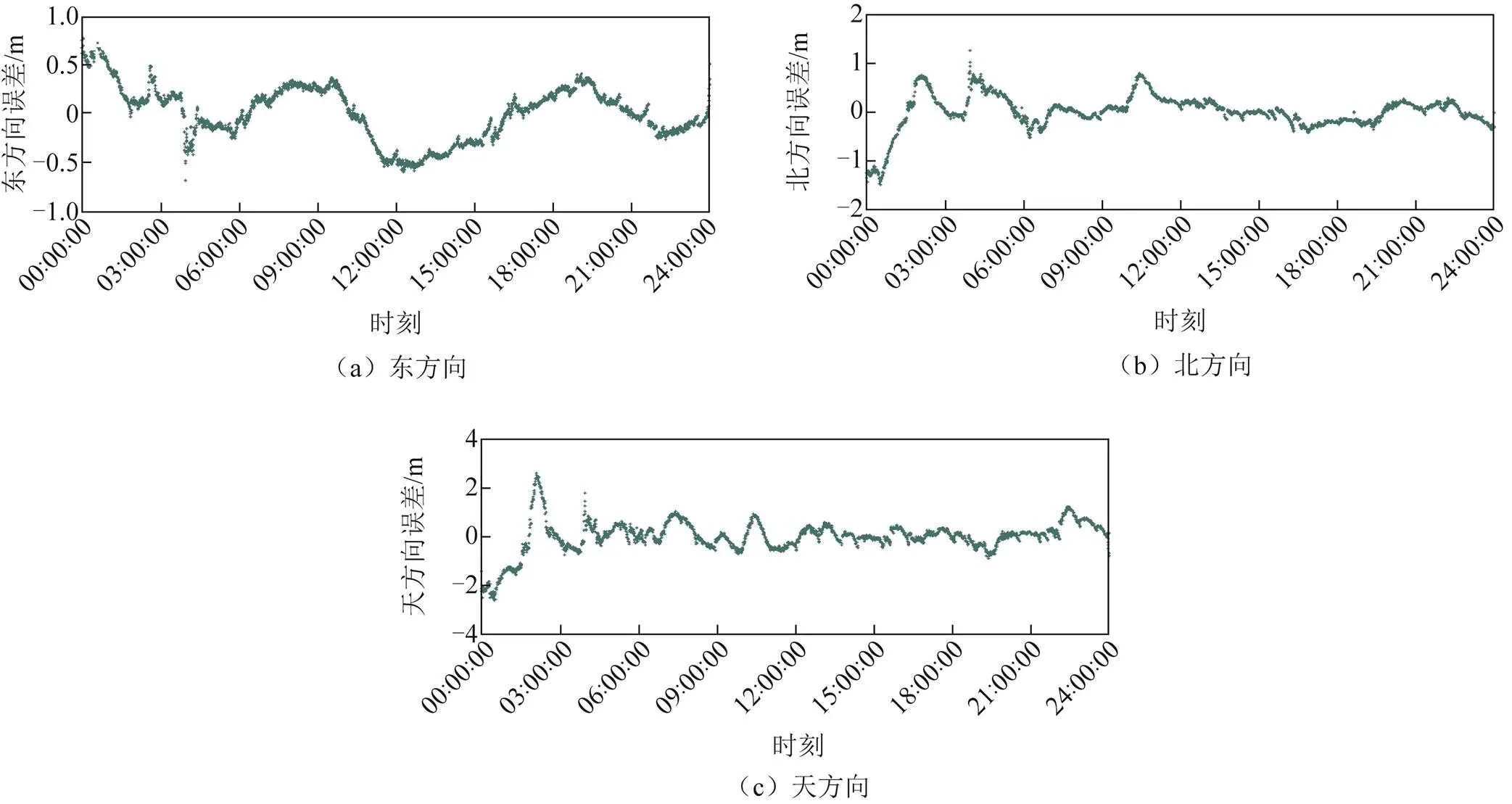
圖13 東北天方向偏差曲線
5 結束語
本文提出了一種基于GNSS的物流信息跟蹤系統設計,以STM32L151RCT6為主控制器,利用NB-IoT通信將包裹的位置信息、溫濕度信息、運動狀態等穩定上傳至遠程服務器,用戶從web網頁可以實時查詢包裹的物流信息。經測驗,該系統能夠完成對包裹信息的跟蹤和穩定上傳,其定位跟蹤精度在2.5 m以內,為用戶的財產安全提供了保障,為快遞公司物流的正常運轉提供了保證,為規模化、集中化管理快遞包裹提供了途徑。
[1] REN H. Design of port enterprise logistics vehicle location tracking system based on big data[J]. Journal of Coastal Research, 2020(103): 873-876.
[2] TRENTA N M, JOUBERTA J W, GIDOFALVI G, et al. A matching algorithm to study the evolution of logistics facilities extracted from GPS traces[J]. Transportation Research Procedia, 2020, 46: 237-244.
[3] DUNKE F, NICKEL S. Improving company-wide logistics through collaborative track and trace IT services[J]. International Journal of Logistics Systems and Management, 2020, 35(3): 329-353.
[4] 劉彥彥. 基于DGPS和電子感應技術的魚雷罐車定位跟蹤系統研究[D]. 合肥: 合肥工業大學, 2016.
[5] 王志辰, 蘇新彥, 姚金杰. 基于北斗衛星的定位與跟蹤系統設計[J]. 國外電子測量技術, 2018, 37(3): 73-76.
[6] 張超, 顧濟華. 基于GPS/BDS的移動目標定位追蹤系統設計[J]. 現代電子技術, 2015, 38(17): 121-123, 126.
[7] XING J J. An intelligent logistics tracking system based on wireless sensor network[J]. International Journal of Online Engineering, 2018, 14(1): 53-56.
[8] 王志偉, 許江淳, 李玉惠, 等. 基于MEMS傳感器的物流車輛位置及姿態追溯系統設計[J]. 軟件, 2017, 38(9): 23-27.
[9] MOON K, LEE D H, CHAE S H. Active radio frequency identification tag applied to logistics tracking system and communication method: US 9697399 B2[P]. 2017-07-04.
[10] 楊磊, 田立偉. 基于無線傳感器網絡的物流跟蹤管理系統研究[J]. 電腦知識與技術, 2016, 12(22): 203-205.
[11] 黃軼文. NB-IoT動物定位跟蹤系統的設計與實現[J]. 工程技術研究, 2019, 4(23): 236-238.
[12] 王青平, 肖健, 鄭超, 等. 基于北斗短報文的震源船跟蹤系統設計與實現[J]. 應用海洋學學報, 2019, 38(1): 135-140.
[13] 劉英杰, 郭文科, 秦文虎. 基于MEMS傳感器的汽車試驗場道路識別系統[J]. 傳感器與微系統, 2020, 39(7): 72-75.
[14] 董露, 石磊, 胡德正, 等. 基于北斗衛星的手機定位跟蹤系統設計與實現[J]. 軟件導刊, 2017, 16(6): 110-112.
[15] 鄒美廣. 基于貨品跟蹤定位的倉儲信息系統設計與實現[D]. 南京: 南京理工大學, 2019.
Design of logistics information tracking system based on GNSS
YIN Haibo1,2, XU Xiong2, GUO Hang1,2
(1. Institute of Space Science and Technology, Nanchang University,Nanchang 330031, China; 2. School of Information Engineering, Nanchang University, Nanchang 330031, China)
Aiming at the loss and damage of express delivery in the transportation process in modern life, and the customer’s worry about important packages in transit, a logistics information tracking system design based on the Global Navigation Satellite System (GNSS) was proposed. Based on the embedded real-time operating system, the STM32L151RCT6 single-chip microcomputer was the main control module, which drived the sensing part (GNSS position sensor, temperature and humidity sensor, acceleration sensor) to collect various logistics information of the package, and logistics information was transmited to the cloud platform of the internet of things of the express company through the Narrow Band Internet of Things (NB-IoT) communication. Users could query the logistics information of the package through the web page, including the precise location, temperature and humidity, and movement status. The test results showed that the system could complete the tracking and stable upload of package information, and its positioning and tracking accuracy was within 2.5 meters, which could realize centralized and large-scale management of express packages.
logistics tracking; narrow band internet of things communication; global navigation satellite system; microcontroller unit; embedded real-time operating system
P228
A
2095-4999(2021)06-0096-08
尹海博,徐熊,郭杭. 基于GNSS的物流信息跟蹤系統設計[J]. 導航定位學報, 2021, 9(6): 96-103.(YIN Haibo, XU Xiong, GUO Hang. Design of logistics information tracking system based on GNSS[J]. Journal of Navigation and Positioning, 2021, 9(6): 96-103.)
10.16547/j.cnki.10-1096.20210615.
2021-01-08
國家自然科學基金資助項目(41764002)。
尹海博(1997—),男,湖南湘潭人,碩士研究生,研究方向為GNSS導航定位。
郭杭(1960—),男,江西南昌人,博士,教授,博士生導師,研究方向為GNSS導航定位。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
物流技術與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
現代企業(2015年2期)2015-02-28 18:45:09
中外會展(2014年4期)2014-11-27 07:46:46
商界(2014年12期)2014-04-29 00:44:03