基于AI圖像識別技術(shù)的架空乘人裝置智能控制系統(tǒng)設(shè)計及應(yīng)用
2021-12-04 07:16:43楊坤張永福
機(jī)電信息 2021年27期
關(guān)鍵詞:智能控制
楊坤 張永福
摘要:目前國內(nèi)煤礦井下架空乘人裝置大多數(shù)實現(xiàn)了自動或者半自動控制,但大部分沒有實現(xiàn)智能控制,鑒于此,設(shè)計了一套基于AI圖像識別技術(shù)的架空乘人裝置智能控制系統(tǒng),詳細(xì)介紹了系統(tǒng)組成、系統(tǒng)設(shè)計和功能,利用AI圖像識別技術(shù)對上下乘車點、乘車沿途進(jìn)行圖像智能識別分析,并與控制系統(tǒng)聯(lián)動,有效防范了運送人員過程中的不安全因素,實現(xiàn)了架空乘人裝置安全運行、無人值守運行。實踐證明,該系統(tǒng)運行穩(wěn)定,實現(xiàn)了架空乘人裝置的智能運行。
關(guān)鍵詞:架空乘人裝置;AI圖像識別技術(shù);智能控制;無人值守
0 引言
近年來,我國從政府層面先后出臺了一系列政策和規(guī)劃,大力推進(jìn)煤礦智能化建設(shè)[1],實現(xiàn)井下作業(yè)人員的少人化和無人化,提升煤礦本質(zhì)安全水平,而其中人工智能是智能煤礦建設(shè)的關(guān)鍵技術(shù),在實現(xiàn)架空乘人系統(tǒng)無人值守中發(fā)揮著重要作用。架空乘人裝置是煤礦井下常用的輔助運輸設(shè)備之一,主要用于運輸井下人員,節(jié)省人員非必要的體力消耗。目前國內(nèi)煤礦井下大多數(shù)架空乘人裝置已實現(xiàn)自動或者半自動控制,即可以做到定時開停架空乘人裝置或安排井下值班人員開停架空乘人裝置,但無法做到工人到上車點自動啟動架空乘人裝置,下車后自動停止架空乘人裝置;同時,在人員安全保障[2]方面僅僅局限于越位保護(hù)、急停保護(hù)、斷繩保護(hù)、語音報警等,無法對乘車過程中的人員行為進(jìn)行實時監(jiān)控。為了實現(xiàn)架空乘人裝置的智能運行,本文提出了基于AI圖像識別技術(shù)的架空乘人裝置智能控制系統(tǒng)設(shè)計。
1 系統(tǒng)組成
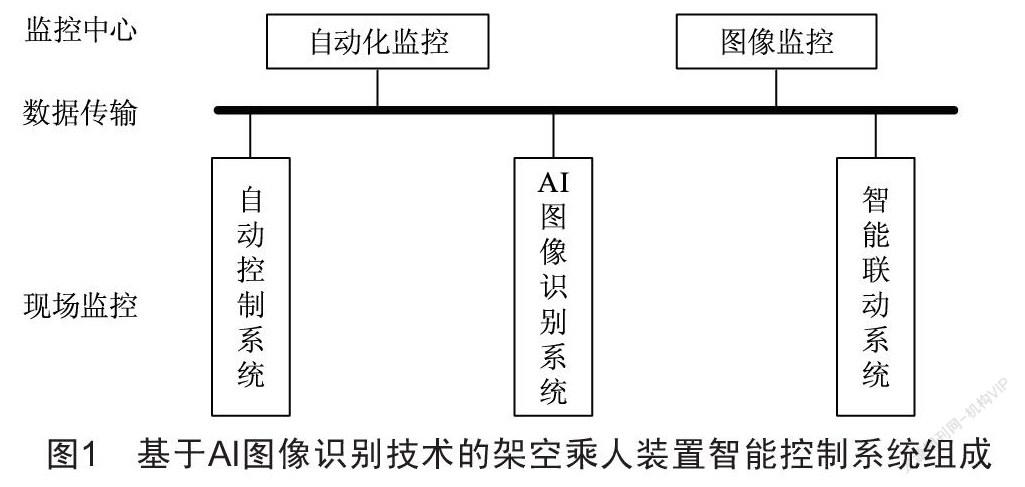
如圖1所示,基于AI圖像識別技術(shù)的架空乘人裝置智能控制系統(tǒng)主要由監(jiān)控中心、數(shù)據(jù)傳輸、現(xiàn)場監(jiān)控等組成。
1.1? ? 監(jiān)控中心
部署在地面集控中心,包括工控機(jī)、顯示器、報警裝置等硬件設(shè)備及配套軟件,顯示部分分為自動化監(jiān)控和圖像監(jiān)控兩部分。自動化監(jiān)控部分可以實時監(jiān)視架空乘人裝置系統(tǒng)數(shù)據(jù),實時顯示緊急停機(jī)區(qū)域、過乘急停保護(hù)區(qū)域、鋼絲繩托槽保護(hù)、沿線急停閉鎖等及故障位置、電機(jī)電流、溫度等數(shù)據(jù);可控制架空乘人裝置的啟停和故障緊急停車;同時,具備操作記錄和故障記錄查詢功能、數(shù)據(jù)曲線分析等功能。圖像監(jiān)控部分可以實時顯示監(jiān)控圖像,可以顯示圖像智能分析及報警畫面,具備報警圖片和報警短視頻截取、存儲功能。
1.2? ? 數(shù)據(jù)傳輸
可以利用礦井工業(yè)以太網(wǎng)[2]、F5G網(wǎng)絡(luò)或5G/Wi-Fi 6等信息網(wǎng)絡(luò)進(jìn)行數(shù)據(jù)傳輸。
1.3? ? 現(xiàn)場監(jiān)控
現(xiàn)場監(jiān)控包括:(1)自動控制系統(tǒng);(2)AI圖像識別控制系統(tǒng);(3)智能聯(lián)動系統(tǒng)。
自動控制系統(tǒng):實現(xiàn)架空乘人裝置的設(shè)備參數(shù)采集、保護(hù)接入和設(shè)備控制;具備閉鎖邏輯控制,可根據(jù)接收到的信號自動啟停,采用主控器PLC作為控制單元[3]。
AI圖像識別控制系統(tǒng)和智能聯(lián)動系統(tǒng):主要實現(xiàn)各類場景的圖像識別,并與控制系統(tǒng)進(jìn)行聯(lián)動,實現(xiàn)架空乘人裝置的安全高效運行。
2 AI識別算法介紹
在架空乘人裝置的上車點、下車點以及沿線安裝AI智能攝像儀,根據(jù)攝像儀捕捉的畫面,利用視頻處理的方法基于設(shè)定場景對畫面進(jìn)行智能識別分析。
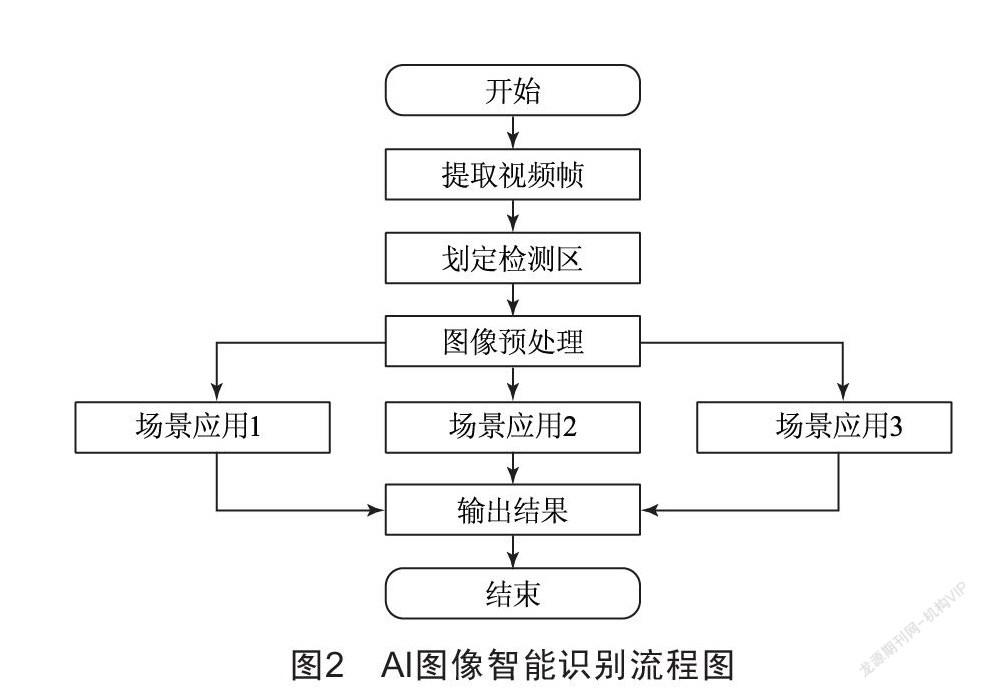
如圖2所示,AI圖像智能識別主要流程如下:(1)提取攝像儀輸出的視頻幀;(2)根據(jù)提取的視頻幀,劃定檢測識別區(qū)域;(3)預(yù)處理檢測區(qū)域的圖像;(4)邊緣提取處理后的圖像特征,與樣本庫特征進(jìn)行比對,并輸出檢測識別結(jié)果。
預(yù)處理:主要分為圖像灰度化和濾波。檢測區(qū)域的圖像為三通道RGB彩色圖像,首先要對其進(jìn)行灰度化,將其從彩色圖轉(zhuǎn)換成灰度圖;其次要對灰度圖進(jìn)行濾波處理,用來去除圖像中的噪點、黑斑和無關(guān)因子。
AI智能識別算法:采用結(jié)構(gòu)化圖像分析處理技術(shù),涉及圖像采集、目標(biāo)檢測、目標(biāo)跟蹤、屬性分類、目標(biāo)軌跡分析、圖像疊加、編碼、RTSP推流等。核心目標(biāo)識別算法采用人工智能領(lǐng)域中卷積神經(jīng)網(wǎng)絡(luò)與全連接層構(gòu)建技術(shù),通過采用一體化卷積網(wǎng)絡(luò)檢測算法,把整張圖像作為數(shù)據(jù)輸入,通過一次前向傳播得到目標(biāo)的定位位置和目標(biāo)類別,然后再采用RPN的多參考窗口技術(shù),進(jìn)一步在多個分辨率不同特征圖上進(jìn)行識別檢測。采用高級的跟蹤算法,通過預(yù)訓(xùn)練的神經(jīng)網(wǎng)絡(luò)模型提取目標(biāo)物理特性,通過該模型計算每個目標(biāo)的外觀特征值,然后計算前后兩幀中目標(biāo)計算特征值之間的“余弦距離”來比較兩個目標(biāo)的相似度,實現(xiàn)有效識別和分析。
3 AI圖像識別控制系統(tǒng)設(shè)計和功能
AI圖像識別控制系統(tǒng),通過實時讀取場景行為視頻數(shù)據(jù),基于深度學(xué)習(xí)、視頻大數(shù)據(jù)分析和計算機(jī)視覺目標(biāo)跟蹤等技術(shù),有效識別人員進(jìn)入?yún)^(qū)域或闖入危險區(qū)域、未佩戴安全帽、乘距等。首先需要完成樣本視頻中行為事件的標(biāo)注;其次完成基于行為事件標(biāo)注數(shù)據(jù)的模型訓(xùn)練;然后對訓(xùn)練完成的模型進(jìn)行測試和優(yōu)化;最后完成行為事件識別的接口開發(fā),返回視頻中行為事件識別的檢測結(jié)果。
AI圖像識別控制系統(tǒng)的架構(gòu)包括圖像智能分析、系統(tǒng)聯(lián)動和效果展示。圖像智能分析主要由圖像采集單元、智能分析檢測單元、就地報警單元等組成;系統(tǒng)聯(lián)動由網(wǎng)絡(luò)傳輸、信號傳遞和設(shè)備控制單元組成;效果展示是AI圖像識別控制系統(tǒng)識別效果的最終呈現(xiàn),同時負(fù)責(zé)業(yè)務(wù)數(shù)據(jù)存儲轉(zhuǎn)發(fā)、報警信息推送、報警錄像存儲及回放。
3.1? ? 定義報警和控制規(guī)則
根據(jù)系統(tǒng)應(yīng)用需求,視頻分析檢測人員、乘距、人員行為等情況,以實現(xiàn)對人員安全的保護(hù)。根據(jù)視頻分析結(jié)果定義如下規(guī)則。
報警規(guī)則:根據(jù)預(yù)設(shè)的場景識別功能,識別結(jié)果包括是或否;識別后智能攝像儀就地語音報警,地面軟件進(jìn)行存儲記錄。
控制及聯(lián)動規(guī)則:智能攝像儀通過以太網(wǎng)通信輸出數(shù)據(jù)到自動控制系統(tǒng)或通過攝像儀的干接點直接控制架空乘人裝置停車。
智能攝像儀內(nèi)置AI智能處理芯片,采用AI智能算法圖像語義分割技術(shù),對移動的物體進(jìn)行邊緣提取,找出各類物體的區(qū)域,從而進(jìn)行智能識別;具備報警開關(guān)量輸出功能,具備RS485串口通信功能,支持標(biāo)準(zhǔn)的Modbus協(xié)議。通過此協(xié)議智能攝像儀可以與主控器PLC相互通信,從而實現(xiàn)數(shù)據(jù)對接、系統(tǒng)聯(lián)動。
3.2? ? 主要應(yīng)用場景及功能
3.2.1? ? 人員識別
基于深度學(xué)習(xí)的檢測算法,對上車點、下車點、變坡點以及沿線關(guān)鍵區(qū)域進(jìn)行人員識別檢測,識別后可與控制系統(tǒng)聯(lián)動。即人員到上車點后,能自動識別,實現(xiàn)自動啟動架空乘人裝置;到下車點后,如果人員未下車則自動停車;在變坡點及沿線關(guān)鍵區(qū)域,進(jìn)行實時監(jiān)控,結(jié)合計算機(jī)視覺目標(biāo)檢測算法,當(dāng)指定區(qū)域有人體出現(xiàn)時,進(jìn)行報警。
3.2.2? ? 乘距識別與聯(lián)動
主要對上車階段的乘車距離進(jìn)行識別,一旦識別到乘車距離過近時,AI攝像儀自動報警。乘距可設(shè)置報警距離和停車距離,根據(jù)設(shè)置距離判斷是否自動停車。
3.2.3? ? 人員行為識別與聯(lián)動
主要對人員是否佩戴安全帽、是否攜帶超長/超高物品,使用人工智能方法,對監(jiān)測區(qū)域進(jìn)行全天候監(jiān)視,對未佩戴安全帽或攜帶超限物品等行為及時發(fā)現(xiàn)并上報,做到及時發(fā)現(xiàn)、主動報警、必要時停車。
3.2.4? ? 人數(shù)統(tǒng)計
對上車點區(qū)域進(jìn)行監(jiān)測,當(dāng)監(jiān)測區(qū)域內(nèi)人員超出設(shè)定人員數(shù)量時,可自動報警,就地提醒擁擠人員,閾值可靈活設(shè)置。
4 結(jié)語
隨著礦井“新基建”[4]的不斷推進(jìn),人工智能技術(shù)必將在智能化煤礦建設(shè)中發(fā)揮重大作用。基于AI圖像識別技術(shù)的架空乘人裝置智能控制系統(tǒng),其核心技術(shù)是人工智能圖像識別,核心目的是保障人身安全,實現(xiàn)手段是系統(tǒng)聯(lián)動,最終目標(biāo)是實現(xiàn)系統(tǒng)的無人值守、智能化運行。該系統(tǒng)已在平煤股份十一礦得到應(yīng)用,實踐表明系統(tǒng)運行穩(wěn)定可靠,值得推廣應(yīng)用。
[參考文獻(xiàn)]
[1] 孫繼平.煤礦物聯(lián)網(wǎng)特點與關(guān)鍵技術(shù)研究[J].煤炭學(xué)報,2011,36(1):167-171.
[2] 黃濤,肖仁喜.礦用架空乘人保護(hù)裝置及安全設(shè)施[J].煤礦機(jī)電,2020,41(2):92-95.
[3] 張漢燾.基于物聯(lián)網(wǎng)的架空乘人裝置無人值守系統(tǒng)的應(yīng)用[J].機(jī)械管理開發(fā),2019,34(8):214-215.
[4] 劉峰,王世雅.清楚認(rèn)識我國煤礦智能化發(fā)展進(jìn)程[N].中國煤炭報,2020-11-21(004).
收稿日期:2021-08-20
作者簡介:楊坤(1984—),男,河南平頂山人,工程師,主要從事煤礦智能化、信息化相關(guān)工作。
猜你喜歡
卷宗(2016年10期)2017-01-21 15:33:38
科技創(chuàng)新與應(yīng)用(2016年34期)2016-12-23 16:04:06
科技創(chuàng)新與應(yīng)用(2016年34期)2016-12-23 09:52:55
電子技術(shù)與軟件工程(2016年20期)2016-12-21 11:36:49
電子技術(shù)與軟件工程(2016年20期)2016-12-21 11:00:56
計算機(jī)教育(2016年10期)2016-12-19 12:15:52
演藝科技(2016年10期)2016-11-26 22:11:21
科學(xué)與財富(2016年28期)2016-10-14 04:41:37
科技視界(2016年4期)2016-02-22 19:51:01
