震相關聯方法在國家數字地震臺網地震實時監測系統的應用
2021-12-07 01:16:32郭鐵龍閆恩輝鄒立曄
地震地磁觀測與研究 2021年4期
郭鐵龍 閆恩輝 鄒立曄
(中國北京 100045 中國地震臺網中心)
0 引言
同一個地震產生的地震波可被不同臺站記錄,且各臺站記錄的震相到時具有關聯性。使用震相關聯方法進行地震定位,已在地震監測和地震預警軟件中得到廣泛應用(Johnson et al,1994;Dietz,2002;Wu and Teng,2002;Cua et al,2009;Pesaresi,2011;Olivieri and Clinton,2012;方偉華等,2018;Zhang et al,2019),如:德國GEOFON 臺網開發并使用的SeisComP3 系統中的scautoloc 自動定位模塊(徐志國等,2016;徐志國等,2017)、美國地質調查局(USGS)開發并使用的Earthworm 中的binder_ew 定位模塊(USGS et al,2010;方偉華等,2018),以及廣東省地震局開發的JOPENS 地震數據處理系統中的RTS實時處理模塊(吳永權等,2010),均使用該方法進行地震自動定位,可產出準確且穩定的地震事件自動定位結果。
文中利用地震震相關聯方法,對國家數字地震臺網地震實時監測系統軟件(Ecums_rt)的產出速度與精度進行優化,改進系統的“一刀切”(滿足地震臺站觸發數量閾值)觸發模式,并改善臺站定位結果及人工復核效率受到制約等問題。通過特征震相關聯定位的方式,剔除觸發臺站記錄的不相關(問題、誤觸發)震相,產出準確的定位結果,提升地震事件波形人工復核效率,從而使得地震速報工作準確而快速地完成。
1 系統介紹
國家數字地震臺網地震實時監測系統軟件Ecums_rt(宋銳等,2001;Guo et al,2019)“九五”期間編制完成,并作為中國地震臺網中心地震速報波形處理軟件使用至今。
國家數字地震臺網地震實時監測系統由C 語言編寫,架構層次清晰,由地震數據接收模塊、數據解壓與實時波形顯示模塊及多周期自動檢測地震事件模塊3 部分組成,具有數據接收、檢測和顯示(圖1)的功能:①系統經由數據接收進程(rcv)連接數據流服務器,接收地震臺站實時地震波形數據,以mseed 格式儲存至數據接收共享區(rcvBuf);②通過數據解壓進程(sln),讀取數據接收共享區暫存的地震波形數據,解壓為evt 格式的波形數據,存儲至地震數據檢測共享區(detBuf);③地震自動檢測模塊(detc、detL 與detS)逐臺站讀取地震數據檢測共享區的數據,進行地震事件波形觸發檢測。當地震自動檢測模塊檢測到多個臺站滿足系統觸發閾值時,則判定系統檢測到地震事件;④系統產生報警文件,觸發警報進程,并觸發寫入波形進程(wrte),將地震數據檢測共享區存儲的數據以觸發地震事件時刻作為文件名,寫入指定目錄存檔;⑤波形顯示進程(waves)實時讀取數據檢測共享區數據,將波形顯示在屏幕上。
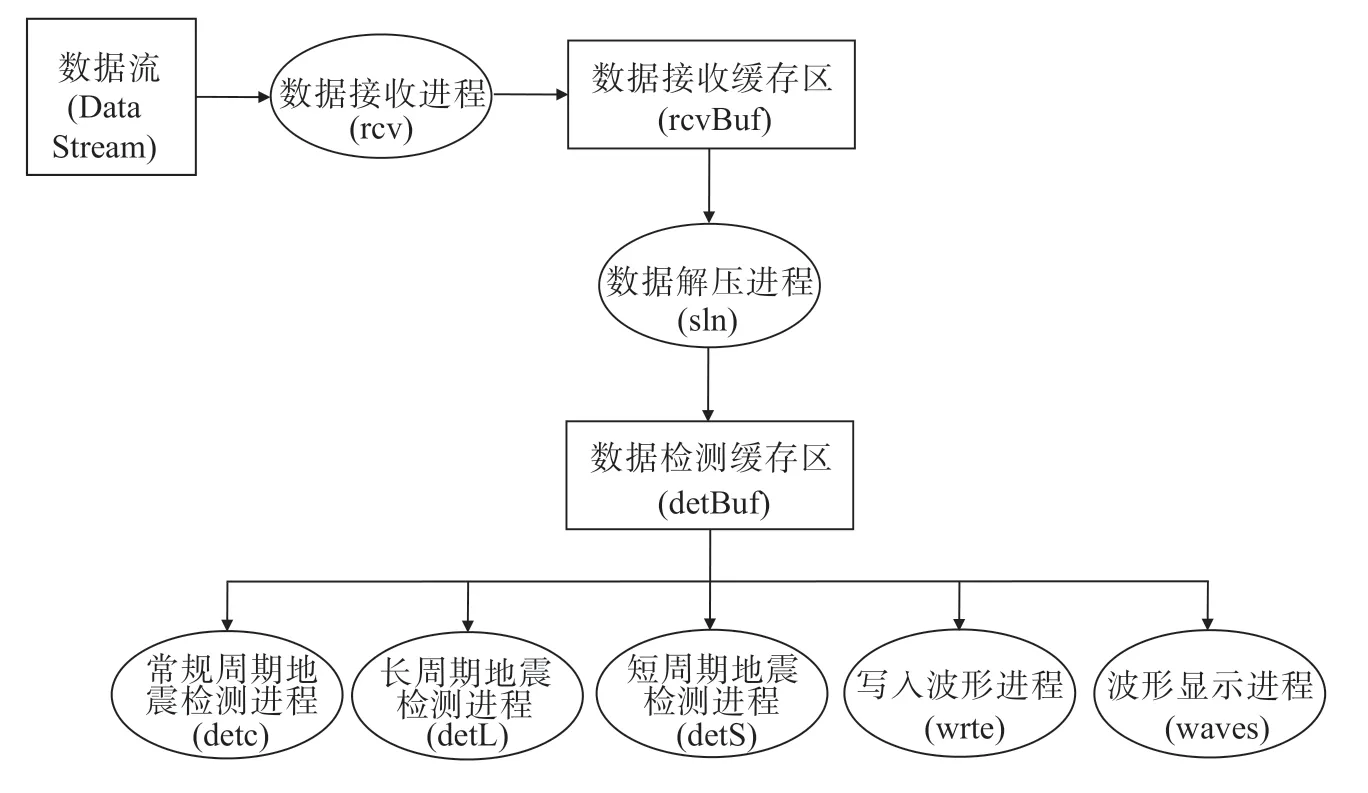
圖1 國家臺網中心Ecums_rt 系統模塊結構(Guo et al,2019)Fig.1 The module structure of the Ecums_rt system in the National Seismic Network Center(Guo et al,2019)
2 系統優化改進
2.1 震相關聯方法
震相關聯方法(Johnson et al,1994;Dietz,2002;Zhang et al,2019)的原理是,根據地震臺站記錄的一系列P 波到達時間與已知對應的觸發地震臺站位置,利用一維地殼速度結構模型,將P 波傳播時間的投影疊加在一個時空網格上,尋找殘差最小格點,作為最近未關聯的拾取震源,根據上述地震信息的關聯性,最終獲取未存檔地震事件。該方法利用地震臺站記錄的最新觸發震相與已歸檔的地震信息進行震相關聯分析,若發現新震相與歸檔地震存在相關性,則將新震相歸檔,有效避免其對后續地震事件自動定位造成干擾。否則,新觸發震相在共享池中等待與更多觸發震相合成新地震事件。
Earthworm 系統中的binder_ew 模塊工作流程(圖2)是,讀取震相存儲區的地震震相信息,根據臺站記錄的P 波到時,計算是否滿足最近觸發地震事件的關聯閾值。
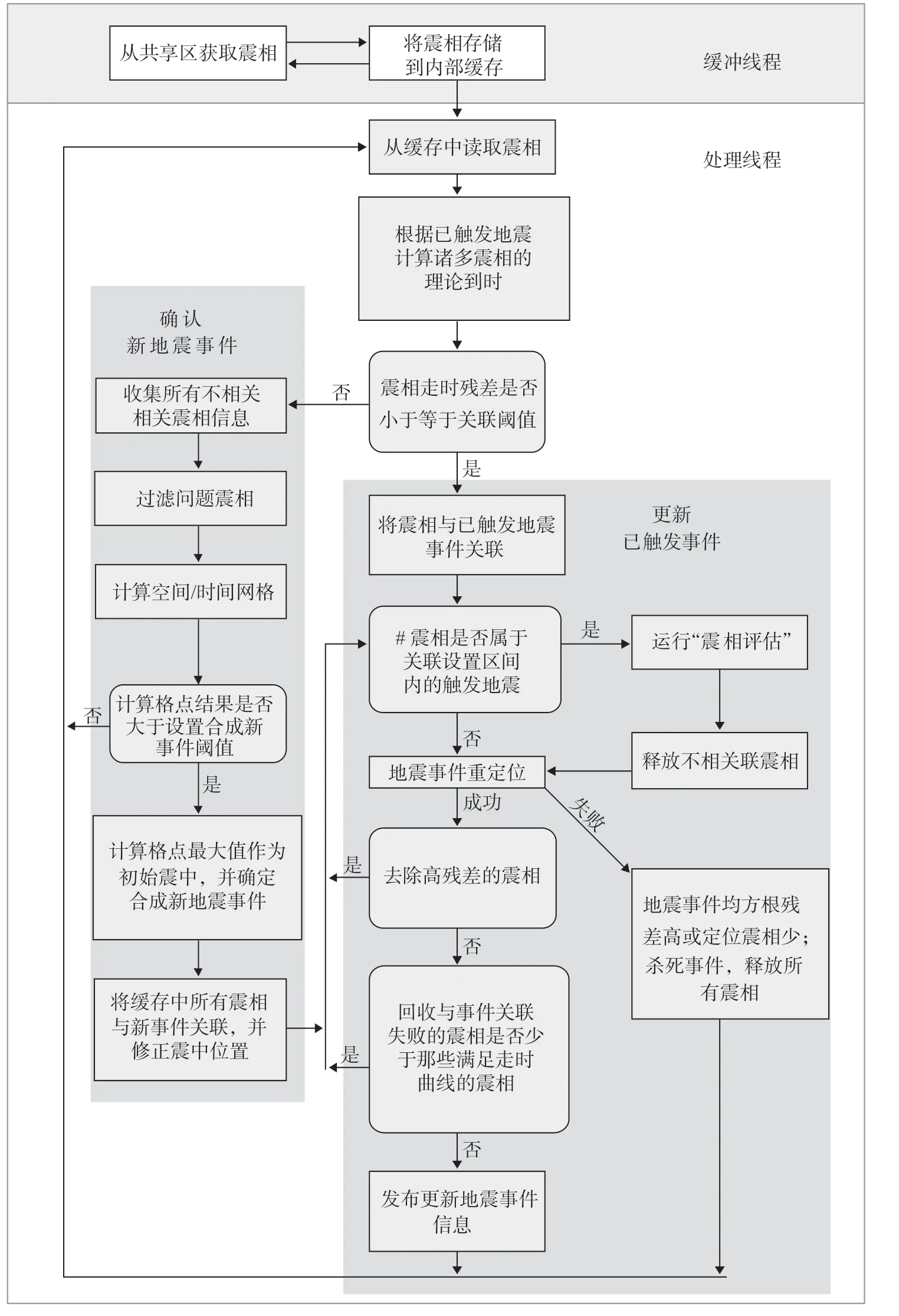
圖2 binder_ew 模塊工作流程(Dietz,2002;USGS et al,2010)Fig.2 Binder_ew module workflow(Dietz,2002;USGS et al,2010)
(1)不滿足閾值時,拾取的震相與已觸發地震事件不相關,則收集所有不相關震相,清除問題震相;根據計算的空間、走時網格閾值,判斷是否產生新地震事件;若震相關聯確認得到新地震事件并產出參數,則將所有待關聯震相參與地震事件定位,否則不相關震相返回震相存儲區。
(2)當滿足震相關聯閾值時,則將拾取的震相關聯至對應的已觸發地震事件,判斷這些被關聯的震相是否處于地震事件區間(在參數文件中配置)中;若滿足條件,則運行“拾取震相評估”程序,釋放不滿足條件的震相,否則對地震事件重新定位,挑選并釋放高殘差震相后迭代重定位,直至可以確定更新的地震事件震源參數;此過程如果無法滿足定位迭代震相數量(參與定位震相數量小于4),模塊將釋放震相。binder_ew 模塊通過挑選同一地震激發的地震震相關聯定位,并通過新震相與地震事件列表比對的方式,歸檔觸發震相,有效解決了地震震相干擾后續地震定位的問題。此外,利用該模塊可以較好地解決同一段時間內發生的多次地震事件(如同時不同地點、余震等)的震相歸集問題。
2.2 Ecums_rt 系統優化
2.2.1 新增關聯定位模塊。Ecums_rt 系統中新增關聯定位模塊(圖3 陰影區),包含P 波震相共享存儲區、震相關聯定位方法和地震事件存儲共享區3 部分。模塊中的P 波震相共享存儲區用于存儲系統拾取的觸發震相與關聯定位失敗后釋放震相。當P 波存儲區的震相數目滿足關聯方法設置的關聯閾值時,利用關聯定位方法讀取存儲區的P 波震相,挑選與歸檔地震事件相關聯震相進行存檔,并對其余未關聯震相進行關聯性計算;當未關聯震相關聯成為新的地震事件后,則以列表形式歸檔存儲,并將對應的震相信息存儲到地震事件共享區。
關聯定位模塊是,在原有系統基礎上,將地震事件檢測模塊與相關自動定位模塊替換為新增關聯定位模塊(圖3)。本研究中關聯定位方法借鑒了binder_ew 模塊邏輯(圖2),其目的在于降低自動定位過程中不相關地震震相的干擾,提高定位結果的準確性。
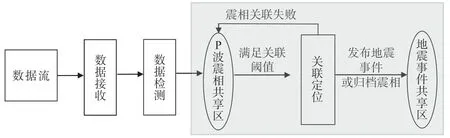
圖3 震相關聯方法流程Fig.3 The workflow of the seismic phase association method
2.2.2 新震相與觸發地震事件的關聯約束條件設置。(1)震相到時約束條件。在震相關聯方法中,對于新震相與觸發地震事件的關聯,要求新震相到時滿足關聯時間約束條件范圍(地震事件發生后前3 —120 s)。為提升震相關聯方法的計算效率,若新震相拾取到時不在該約束范圍內,則系統判斷該震相不能參與觸發地震關聯和歸檔。
(2)震中距約束條件。新震相與觸發地震事件關聯時,根據新震相信息計算的震中距,若大于存檔震相10 倍平均震中距,則認為超出震中距約束條件,從而避免存檔地震事件受到遠距離虛假噪聲干擾而影響自動定位結果。
2.2.3 地震事件重定位。(1)利用震相關聯方法合成新的地震事件時,在P 波震相共享存儲區內,若系統拾取新震相數目滿足震相關聯閾值,則系統對新震相進行關聯定位。本研究中將系統設置3 層迭代網格進行搜索定位,若自動定位殘差小于2.0,則發布新地震事件,并歸檔存入共享區;否則,逐一釋放定位結果中殘差最大的震相,重復迭代搜索定位,直至定位殘差收斂,滿足小于2.0 的要求,或者剩余震相小于震相關聯閾值,則將這些震相釋放,返回震相共享存儲區。
(2)利用震相關聯方法,將新震相與觸發地震事件進行關聯時,模塊遍歷新震相,并判斷是否與觸發地震事件相互關聯,以降低關聯震相在自動定位過程中的震相干擾。震相關聯過程中,若新震相同時滿足震相到時和震中距約束條件,但在進行迭代網格搜索重定位過程中,導致重定位殘差結果大于2.0,或者計算所得到時殘差大于3.0,則系統將釋放該震相,使其重新返回震相共享存儲區。
運用地震震相關聯方法,采用中國大陸和IASP91 一維地殼速度結構模型參與地震自動定位,可以有效剔除觸發臺站記錄的不相關震相對Ecums_rt 系統自動定位的影響,改善自動定位結果精度,從而保證中國和全球地震定位的準確性。
3 結論
利用震相關聯方法,通過系統拾取地震震相,判斷是否與已觸發地震事件存在關聯性,可降低此類震相在系統自動定位中的干擾性,并根據新震相關聯新地震事件過程中,對震相限制條件的設定與迭代重定位的策略使用,有效提升了系統的自動地震定位能力。
系統新增震相關聯模塊對于同一時間段內發生的多個地震事件,地震臺站先后記錄了不同地震事件的震相信息,利用震相關聯方法,根據臺站記錄震相關聯性,可較好地分離并歸檔、發布這些地震事件,不僅有效提升了地震監測軟件自動識別地震事件的能力,而且提高了地震事件處理核實效率。
借鑒Earthworm 系統中的binder_ew 模塊運行邏輯,運用震相關聯方法,解決了Ecums_rt 系統滿足觸發臺站數目后“一刀切”的窘境,對系統自動拾取的震相進行關聯組合,使具有相關性的臺站震相合理參與到系統自動定位,最大程度地保留未關聯地震臺站,等待由同一地震事件觸發的地震臺站記錄的新震相關聯,從而使系統更加智能地篩選摻雜其中干擾觸發臺站記錄的震相。即使待關聯的P 波震相共享區摻雜著非地震造成的誤觸發臺站記錄震相信息,由于受震相關聯方法策略設置限制,而不能與其他臺站記錄的新震相關聯,自然也不會影響到系統自動定位結果。因此,震相關聯方法對地震監測系統自動定位結果準確性的提升發揮了重要作用。在系統后續改進中,嘗試在震相關聯方法中加入S、Pn波等其他震相信息,提高震相關聯效率,降低方法容錯率,提供快速的自動速報信息參考,提升余震事件處理效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
當代陜西(2021年17期)2021-11-06 03:21:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學苑創造·A版(2018年11期)2018-02-01 06:29:20
家庭影院技術(2017年9期)2017-09-26 03:41:45
讀者(2017年5期)2017-02-15 18:04:18
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56