水下無人航行器探潛能力建模與仿真分析
2021-12-10 17:03:20李霄霄閆仲秋何希盈
艦船科學(xué)技術(shù) 2021年10期
尤 岳,周 濤,陳 科,李霄霄,閆仲秋,何希盈
(1. 海軍研究院,北京 100161;2. 江蘇自動化研究所,江蘇 連云港 222061;3. 海軍指揮學(xué)院,江蘇 南京 210016)
0 引 言
水下無人航行器作為一種發(fā)展迅速的新型作戰(zhàn)力量,將推動未來戰(zhàn)爭形態(tài)由信息化戰(zhàn)爭向智能化戰(zhàn)爭轉(zhuǎn)變,成為海軍作戰(zhàn)力量體系中的重要組成部分。依據(jù)被動聲吶方程,開展?jié)撏cUUV的探測能力建模估算,并對UUV規(guī)避潛艇開展運動建模和仿真分析,探索水下無人航行器在未來作戰(zhàn)中的使用方式和方法。
1 UUV探測潛艇能力分析
相比于潛艇裝備,UUV具有體積小、隱身性好、機動靈活、成本低、可組網(wǎng)使用等優(yōu)勢,在未來反潛作戰(zhàn)中具有很大的應(yīng)用潛力[1-2]。但隨著現(xiàn)代潛艇隱身性能和探測能力逐漸提升,對UUV反潛提出了更高的要求。由于負(fù)載能力有限,單平臺UUV水下探測能力相對潛艇較弱,在UUV探測潛艇的過程中能否先敵發(fā)現(xiàn)是核心關(guān)鍵,需要綜合兩者的隱身與探測能力進(jìn)行綜合評估[3],本文選取UUV和潛艇的被動聲吶為研究對象,在對各自輻射噪聲仿真的基礎(chǔ)上,分析對比了UUV和潛艇的相互發(fā)現(xiàn)距離。
1.1 潛艇輻射噪聲的特征
潛艇輻射主要包括寬帶噪聲和特征線譜噪聲,噪聲源分為3類:機械噪聲、水動力噪聲和推進(jìn)器噪聲[4]。低航速工況下(約10 kn以下),輻射噪聲以機械噪聲為主,在此階段隨著航速的增加,主要設(shè)備功率逐漸增大,設(shè)備及軸系激勵不斷變大,輻射噪聲也隨之增加;中高航速(超過10~12 kn)下水動力噪聲和螺旋槳噪聲逐漸占主導(dǎo),其中水動力噪聲輻射聲功率隨航速的5~6次方關(guān)系增長;當(dāng)航速超過推進(jìn)器空泡臨界航速時,高頻噪聲顯著增強,空泡出現(xiàn)初始階段高頻段噪聲躍升量約5~10 dB,隨著航速進(jìn)一步提高,空泡噪聲將成為輻射噪聲主導(dǎo)成分,隨航速的7~10次方關(guān)系增長[5]。
1.2 潛艇輻射噪聲估算
考慮到各類潛艇聲學(xué)設(shè)計和性能特點具有較大差異,輻射噪聲隨航速的增長關(guān)系較為復(fù)雜,目前尚無可用于工程應(yīng)用的輻射噪聲與航速關(guān)系的計算方法。為滿足UUV探潛建模仿真中聲吶方程解算需求,本文參考文獻(xiàn)[6],利用輻射噪聲與航速的經(jīng)驗公式,通過合理選擇參數(shù)表征典型潛艇聲學(xué)特性,滿足一般規(guī)律性要求。

其中:Vm為潛艇航速;T為潛艇的排水量,t,f為噪聲頻率,kHz;k為比例系數(shù),取值范圍為1.5~2;a=0,1,2,3分別代表安靜潛艇、準(zhǔn)安靜潛艇、低噪聲潛艇、普通噪聲潛艇;VT為潛艇的臨界航速;Δ=10~50 dB(Δ的選取依據(jù)不同類型潛艇的實測數(shù)據(jù)指標(biāo)),為潛艇到達(dá)臨界航速后噪聲聲源級的增量;b為潛艇達(dá)到臨界航速后輻射噪聲隨航速變化的斜率,b=1.5~2。
假設(shè)潛艇臨界速度VT為25 kn,噪聲水平為安靜型,a=1,b=1.5,Δ=10 dB,計算潛艇的輻射噪聲級隨航速的變化規(guī)律(見圖1),基本符合各航速階段輻射噪聲的變化規(guī)律。
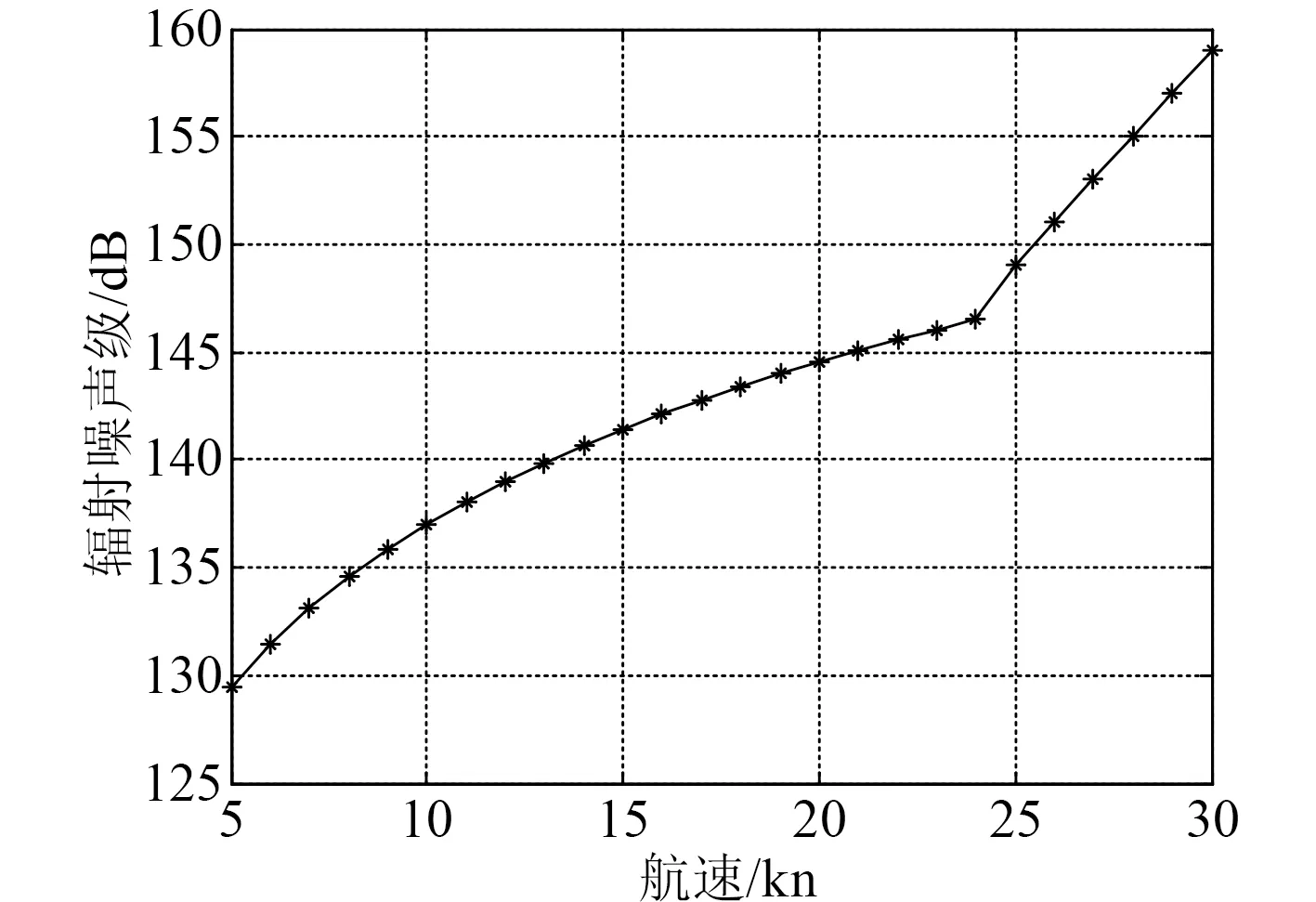
圖1 潛艇輻射噪聲級隨航速變化曲線Fig. 1 Variation of submarine radiation noise level with different velocity
1.3 UUV輻射噪聲估算
因為缺少UUV裝備輻射噪聲數(shù)據(jù),假設(shè)UUV水下排水量為10 t,常規(guī)潛艇和核潛艇的水下排水量分別按3 000 t,7 000 t計,根據(jù)文獻(xiàn)[1]模型計算可知,在相同航速下UUV輻射噪聲級分別比常規(guī)潛艇、核潛艇的低約20 dB,25 dB。考慮到UUV輻射噪聲機械噪聲、水動力噪聲、推進(jìn)器噪聲等三大噪聲源產(chǎn)生,同樣存在推進(jìn)空化噪聲問題,因此本文在潛艇輻射噪聲預(yù)報模型的基礎(chǔ)上通過修正進(jìn)行UUV輻射噪聲評估。將式(2)中的每一項減去一固定值(20 dB),并參考安靜潛艇的噪聲量級進(jìn)行估算,得到UUV的輻射噪聲估算模型:
其中:VT為UUV的臨界航速;Δ1=10~20 dB,為UUV到達(dá)臨界航速后噪聲聲源級的增量;b1為UUV達(dá)到臨界航速后輻射噪聲隨航速變化的斜率,b1=0.5~1。
在臨界航速下,計算UUV的輻射噪聲級為84 dB,這與文獻(xiàn)[7]中設(shè)定的UUV輻射噪聲級為75~90 dB比較接近。假設(shè)UUV航速為1~8 kn,臨界航速為5 kn,Δ1=10 dB,b1=0.5時,UUV輻射噪聲級曲線如圖2所示。

圖2 UUV在不同航速時的輻射噪聲級Fig. 2 Variation of UUV radiation noise level with different velocity
1.4 UUV與潛艇相互發(fā)現(xiàn)距離估算
1)潛艇發(fā)現(xiàn)UUV的距離估計
根據(jù)被動聲吶方程:

定義被動聲吶優(yōu)質(zhì)因素FOM為[8]:

FOM在被動聲吶中,等于允許有最大單程傳播損失,且在該距離上聲吶的發(fā)現(xiàn)概率為50%。其中,S L為潛艇及UUV不同航速下對應(yīng)的輻射噪聲級,NL為聲吶基陣所處環(huán)境的背景噪聲,以下重點分析DT與DI的計算方法。
1)潛艇被動聲吶的檢測閾DT
假設(shè)潛艇被動聲吶利用寬帶平方律檢波器對接收到的噪聲信號進(jìn)行檢波[9],因此檢測閾DT為:

式中:d為檢測指數(shù),檢測概率Pd和虛警概率Pfa依賴于d;B為信號帶寬(通常為一個倍頻程);Te為積分時間,即檢測信號在波束內(nèi)的滯留時間;n為操作者或自動系統(tǒng)在判斷時使用的相繼時間樣本的個數(shù)。
在不同類型潛艇對UUV目標(biāo)進(jìn)行檢測時的DT存有差別,根據(jù)文獻(xiàn)[9]中5lgd的值及建議的適用范圍,選取為5,6,7,8。文獻(xiàn)[9]中將對魚雷和潛艇的積分時間Te分別設(shè)為2 s和10 s,由于UUV的航速要遠(yuǎn)小于魚雷的航速,因此不同類型潛艇對UUV目標(biāo)的積分時間分別設(shè)為30 s,25 s,20 s和15 s。文獻(xiàn)[9]中將操作者在判斷時使用的相繼時間樣本的個數(shù)n,對魚雷和潛艇的分別設(shè)為30,60,同樣考慮到UUV航速較低,不同類型潛艇對UUV目標(biāo)判斷時使用的樣本個數(shù)分別設(shè)為180,140,100和60。
假定聲吶處理信號帶寬B=2 000 Hz,通過求解聲吶方程,可以得到不同類型潛艇的檢測閾如表1所示。

表1 不同類型潛艇的檢測閾Tab. 1 Detection index of different submarine type
2)潛艇被動聲吶的指向性指數(shù)DI
文獻(xiàn)[4]中潛艇被動聲吶利用長8 m、高4 m的舷側(cè)基陣接收信號,該基陣的設(shè)計頻率為2 000 Hz,則λ/2=375 mm,且基陣有10行,每行有20個陣元。假設(shè)潛艇的自噪聲與2級海情相當(dāng),背景噪聲是海洋環(huán)境噪聲,二者強度相當(dāng)。在3 000 Hz時指向性指數(shù)為:

同時在低頻段,由于舷側(cè)基陣被殼體隔離起來,所以DI不能小于3 dB。因此,做如下設(shè)定,安靜潛艇、準(zhǔn)安靜潛艇、低噪聲潛艇、普通噪聲潛艇的指向性指數(shù)DI為在寬帶時為35 dB,33 dB,31 dB和29 dB,窄帶時均為3 dB。
3)潛艇發(fā)現(xiàn)UUV的距離
在FOM公式中,UUV的輻射噪聲級S L可以由式(2)得出,環(huán)境噪聲級設(shè)為90 dB,因此可以求出UUV在不同輻射噪聲級下,潛艇發(fā)現(xiàn)UUV的距離。其中,發(fā)現(xiàn)距離根據(jù)球面擴展加吸收損失計算得到:

式中:K=α×10?3;lambertw為朗伯函數(shù);r為發(fā)現(xiàn)距離,m。
2)UUV發(fā)現(xiàn)潛艇的距離估計
UUV利用寬帶平方律檢波器進(jìn)行信號檢測時,假設(shè)其檢測閾與普通噪聲潛艇的接近,并設(shè)為DT=-21 dB。
與估計潛艇的被動聲吶的指向指數(shù)相似,假設(shè)UUV被動聲吶,利用長1 m、高0.5 m的舷側(cè)基陣接收信號,該基陣的設(shè)計頻率為2 000 Hz,則λ/2=375 mm,且基陣為線列陣,長4.125 m,共有10個陣元。假設(shè)潛艇的自噪聲與2級海情相當(dāng),背景噪聲是海洋環(huán)境噪聲,二者強度相當(dāng)。在2 000 Hz時指向性指數(shù)為:

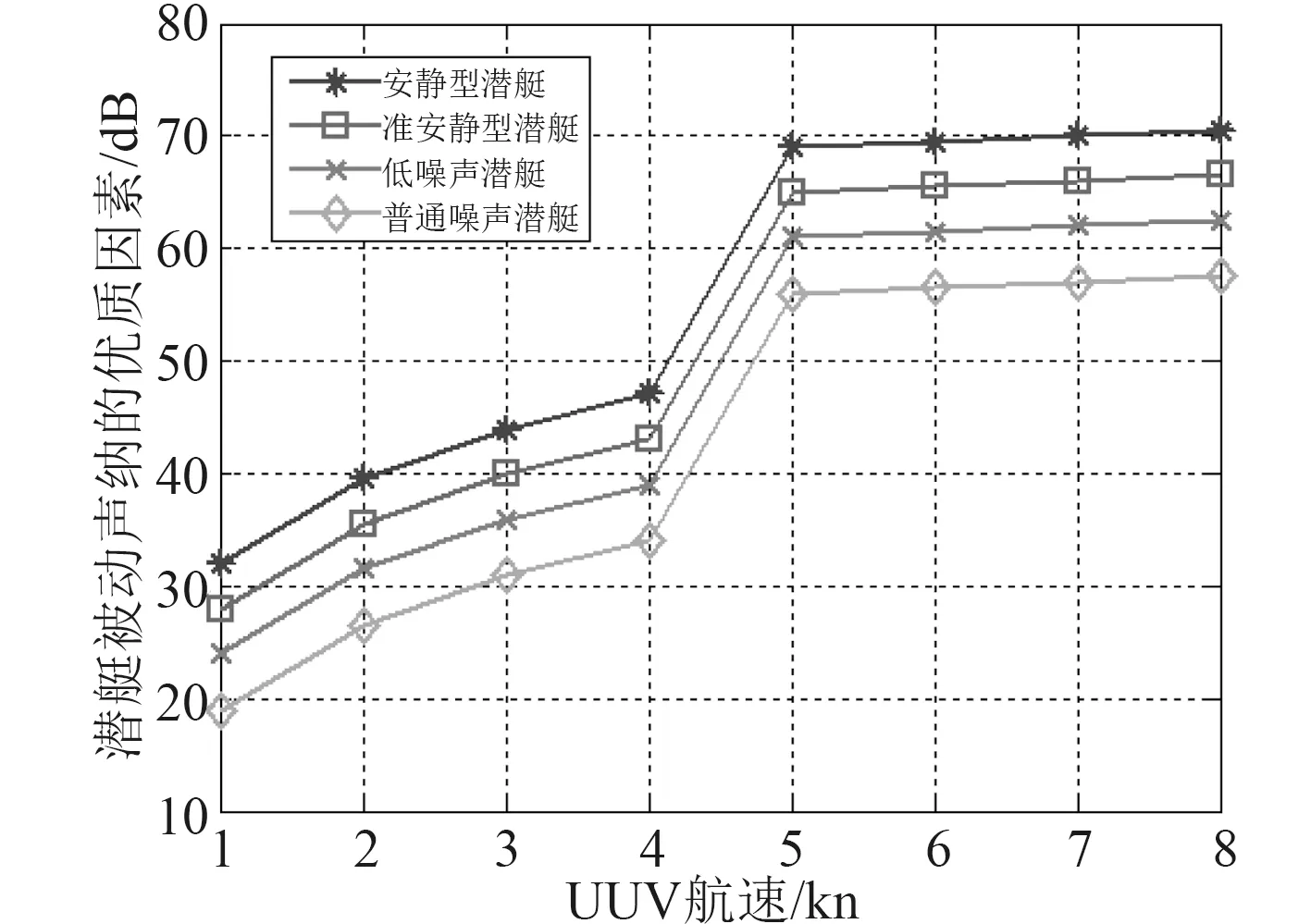
圖3 UUV不同航速下潛艇被動聲吶的優(yōu)質(zhì)因素Fig. 3 Submarine passive sonar FOM with different UUV velocity

圖4 UUV不同航速下潛艇發(fā)現(xiàn)UUV的距離Fig. 4 UUV detection range of submarine passive sonar with different UUV velocity
假設(shè)潛艇的臨界航速均為6 kn,根據(jù)實際情況分析,潛艇航速一般在低于臨界航速下工作,因此下面僅分析UUV對低于6 kn航速潛艇的發(fā)現(xiàn)距離。
根據(jù)潛艇輻射噪聲級模型,計算潛艇的輻射噪聲級,再計算優(yōu)質(zhì)因素,然后利用式(7),求出UUV對潛艇的發(fā)現(xiàn)距離。利用Matlab軟件計算得到在潛艇不同航速時,UUV對潛艇的發(fā)現(xiàn)距離,如圖5所示。
圖5 潛艇不同航速下UUV發(fā)現(xiàn)潛艇的距離Fig. 5 Submarine detection range of UUV passive sonar with different submarine velocity
在UUV指向性指數(shù)為10 dB,環(huán)境噪聲90 dB,檢測閾為-21 dB時,從圖5可以看出,UUV在5 km外就可以發(fā)現(xiàn)普通噪聲潛艇,對低噪聲潛艇發(fā)現(xiàn)距離也大于0.8 km,對于航速5 kn準(zhǔn)安靜型潛艇的發(fā)現(xiàn)距離不大于0.6 km,對于航速5 kn安靜型潛艇的發(fā)現(xiàn)距離不大于60 m。
假設(shè)UUV在反潛中采用4 kn的速度搜索,潛艇以5 kn的速度航行,其余參數(shù)與上述2個仿真情形相同,那么各自對對方的發(fā)現(xiàn)距離如表2所示。因此,UUV在與潛艇的對抗過程中,除了不能先發(fā)現(xiàn)安靜型潛艇外,對其余類型潛艇均可以先敵發(fā)現(xiàn)。
2 UUV規(guī)避潛艇運動模型建模與仿真
UUV的運動模型對于作戰(zhàn)模擬、裝備論證有著重要的意義。針對UUV規(guī)避潛艇搜索進(jìn)行分析、建模,針對不同的初始距離、轉(zhuǎn)向時間對UUV采取不同的規(guī)避航向、航速進(jìn)行計算機仿真,得到了UUV機動規(guī)避成功率較高的航向航速設(shè)置,并深入分析了初始距離和轉(zhuǎn)向時間對敵潛艇搜索的影響。最后對UUV的機動能力和探測能力提出了要求。

表2 UUV與潛艇各自發(fā)現(xiàn)對方的距離表Tab. 2 Detection range of submarine and UUV
2.1 初始態(tài)勢及相關(guān)參數(shù)計算
由于UUV體積小、航速低,輻射噪聲要遠(yuǎn)小于潛艇,但是UUV的巡航速度小于潛艇的巡航速度,且不能高速機動,因此,在UUV與敵潛艇遭遇過程中,必須要能先發(fā)現(xiàn)對方。UUV與敵潛艇遭遇可以有多種情況,為便于研究假設(shè)敵潛艇與UUV相向而行,而且在UUV發(fā)現(xiàn)潛艇后,潛艇仍按原方向航行。此時,潛艇與UUV的運動態(tài)勢如圖6所示。

圖6 潛艇與UUV的運動態(tài)勢Fig. 6 Motion potential of enemy submarine and UUV
圖6中,Hu為UUV規(guī)避航向;Vu為UUV規(guī)避航速;tz為UUV轉(zhuǎn)向時間;θ為UUV與敵潛艇航向之間的夾角;L0為UUV與敵潛艇之間的初始距離;R為敵潛艇發(fā)現(xiàn)UUV的距離;Hs為潛艇航向;Vs為潛艇航速;r(t)為t時刻UUV轉(zhuǎn)向后與潛艇之間的距離;t=0為UUV轉(zhuǎn)向完畢后的時刻。
因此,根據(jù)余弦定理得:

且,L0>R。
UUV能夠成功規(guī)避敵潛艇的條件為:

2.2 仿真計算
1)仿真參數(shù)設(shè)置
在良好水文條件下,UUV航速2~8 kn時,對航速3~12 kn的潛艇發(fā)現(xiàn)距離為10~25 cab;初始距離L0為10~25 Cab,UUV轉(zhuǎn)向時間為2~8 min;敵我航向夾角θ=-30°~60°。上述因素都是影響UUV對潛艇的探測與規(guī)避效果,針對上述6個因素分別選取4個水平,得到正交試驗設(shè)計表,如表3所示。

表3 正交試驗設(shè)計表Tab. 3 Design table of orthogonal experiment
2)仿真結(jié)果分析按照表3給出的影響因素正交設(shè)計表進(jìn)行仿真,得到不同探測距離、不同UUV航速、不同轉(zhuǎn)向時間、不同初始距離、不同潛艇航速和不同航行夾角下UUV與潛艇間相對距離隨時間的變化情況,分別如圖7 ~圖12所示。可以看出除去潛艇航速3 kn的情況之外,在仿真開始的0.4 h時間范圍內(nèi),均存在UUV與潛艇之間的相對距離小于UUV對潛艇發(fā)現(xiàn)距離的時間段。因此,UUV可在大部分情況下發(fā)現(xiàn)潛艇,并做出規(guī)避動作。
圖7 不同探測距離Fig. 7 Different detection range

圖8 不同UUV航速Fig. 8 Different UUV velocity
圖9 不同轉(zhuǎn)向時間Fig. 9 Different turning time
圖10 不同初始距離Fig. 10 Different original range

圖11 不同潛艇航速Fig. 11 Different submarine velocity
3 結(jié) 語
依據(jù)被動聲吶方程,在分析潛艇與UUV被動聲吶檢測閾和指向性指數(shù) 基礎(chǔ)上,結(jié)合輻射噪聲與航速的經(jīng)驗公式,對潛艇和UUV之間的相互發(fā)現(xiàn)距離進(jìn)行了仿真計算,得出UUV在與潛艇的對抗過程中,除了不能先敵發(fā)現(xiàn)安靜型潛艇外,對其余類型潛艇均可以先敵發(fā)現(xiàn)。在UUV對潛探測能力分析的基礎(chǔ)上,構(gòu)建UUV規(guī)避潛艇運動模型,設(shè)計正交實驗,對不同探測距離、不同UUV航速、不同轉(zhuǎn)向時間、不同初始距離、不同潛艇航速和不同航行夾角下UUV與潛艇間相對距離隨時間的變化情況進(jìn)行了仿真計算,仿真結(jié)果表明UUV可在大部分情況下發(fā)現(xiàn)潛艇,并做出規(guī)避動作。

圖12 不同航行夾角Fig. 12 Different heading angle