L 型全回轉推進器船體支撐結構設計與分析
2021-12-10 17:03:34李文華王燕舞
艦船科學技術 2021年10期
宋 揚,李文華,張 偉,王燕舞
(中國船舶及海洋工程設計研究院,上海 200011)
0 引 言
作為一種新型的船舶推進系統,全回轉推進器具有適裝性好、操縱性優良、布置簡便、可靠性高、維護方便等突出優點。目前市場上存在多種類型的全回轉推進器,包括Z型全回轉推進器、L型全回轉推進器以及吊艙式推進器等。發展到現在,全回轉推進器已在諸如豪華郵輪、海洋工程船、民用運輸船、科考/公務船、破冰船等多種船型上得到應用。
對于不同類型的全回轉推進器,其船體支撐結構的受力形式、構件設計和計算驗證亦隨之有所區別。為此,以中國船舶及海洋工程設計研究院(MARIC)研發的某新型6 000 噸級科考船為例,總結其船體支撐結構設計的思路和特點,并求解L型全回轉推進器梁系簡化模型的承力解析解,再運用有限元方法進行驗證分析。6 000 噸級科考船實船安裝L型全回轉推進器如圖1所示。

圖1 6 000 噸級科考船L型全回轉推進器Fig. 1 L-shaped azimuth thruster of the 6 000 tons scientific research vessel
1 船級社相關規范
1.1 構件布置要求
隨著全回轉推進器在越來越多船型上得到運用,各家船級社也陸續推出了針對全回轉推進器支撐結構的具體要求。全回轉推進器的船體支撐結構系指承托吊臂的底座圈梁及其面板和與其相連及周圍的支撐桁材、肋板所組成的正交格柵板架[8],典型結構如圖2所示。

圖2 全回轉推進器典型支撐結構Fig. 2 Typical support structure of azimuth thruster
1.2 許用應力衡準
對于全回轉推進器的支撐結構各家船級社都要求進行直接計算強度評估,關于直接計算的許用應力衡準,中國船級社(CCS)《鋼制海船入級規范》、英國勞氏船級社(LR)《Rules and Regulations for the Classification of Naval Ships》以及國際船級社協會(IACS)《Common Structural Rules for Bulk Carriers(CSR)》中有關規定,如表1所示。

表1 許用應力衡準Tab. 1 Criteria of allowable stress
由表1可以看出:
1)只有CCS明確給出了正常工況和極限工況的應力衡準,LR規范對于極限工況的應力衡準模糊解釋為可適當放寬,需要針對具體船型進行討論;
2)CCS與LR關于正常工況的許用應力衡準要求相近,但CCS沒有給出細網格合成應力的衡準;
3)CSR規范對散貨船上全回轉推進器支撐結構的許用應力衡準提出了嚴苛的要求,在此類型船的設計中需要特別關注。
基于所選取的研究對象,選定CCS的相關規定作為后續直接計算的許用應力衡準。
2 L型全回轉推進器支撐結構設計
目標船采用羅爾斯·羅伊斯公司的新式L型全回轉推進器,推進器分為上下兩部分,便于設備的交付與維修,其在上部船體內集成了一個高效的永磁電機,盡量減少所占用的船體空間。
對于該推進器,在設計時采用單底支撐的結構形式,利用輻射型的短桁材將基座與底部縱桁、肋板相連,同時將短桁材面板在基座連接處做成圓弧形趾端,增加基座連接強度的同時減小應力集中系數,其支撐結構平面如圖3所示。為了盡量提高基座區域的剛度,滿足設備商關于船體支撐結構剛度的要求,應充分利用推進器周邊平臺甲板、縱艙壁、橫艙壁等剛性更強的構件作為支撐結構的端部,最終形成一個完整的船體支撐結構承力框架。

圖3 6 000 噸級科考船單底支撐結構平面Fig. 3 Support structure plan of 6 000 tons vessel
與其他類型全回轉推進器相比,該推進器整體式的嵌入船體內,典型剖面如圖4所示。盡管此種布置會占用部分船體內部空間,卻可以大幅提升支撐結構腹板圈梁高度,同時船體結構在基座面板連接處和船體外板處對推進器形成有效支撐,最終使得這種L型全回轉推進器支撐結構可以承受更大功率推進器載荷,適用于功率較大、尾部空間較富裕的中型科考船上使用。

圖4 6 000 噸級科考船支撐結構典型剖面Fig. 4 Typical support structure section of 6 000 tons vessel
3 基于梁系簡化模型載荷計算
根據設備商資料,6 000 噸級科考船L型全回轉推進器受力示意如圖5所示,有重力G,水動力平面載荷(包含舵力和螺旋槳推力)Fres,水動力垂向載荷Fz以及轉舵扭矩Ms。
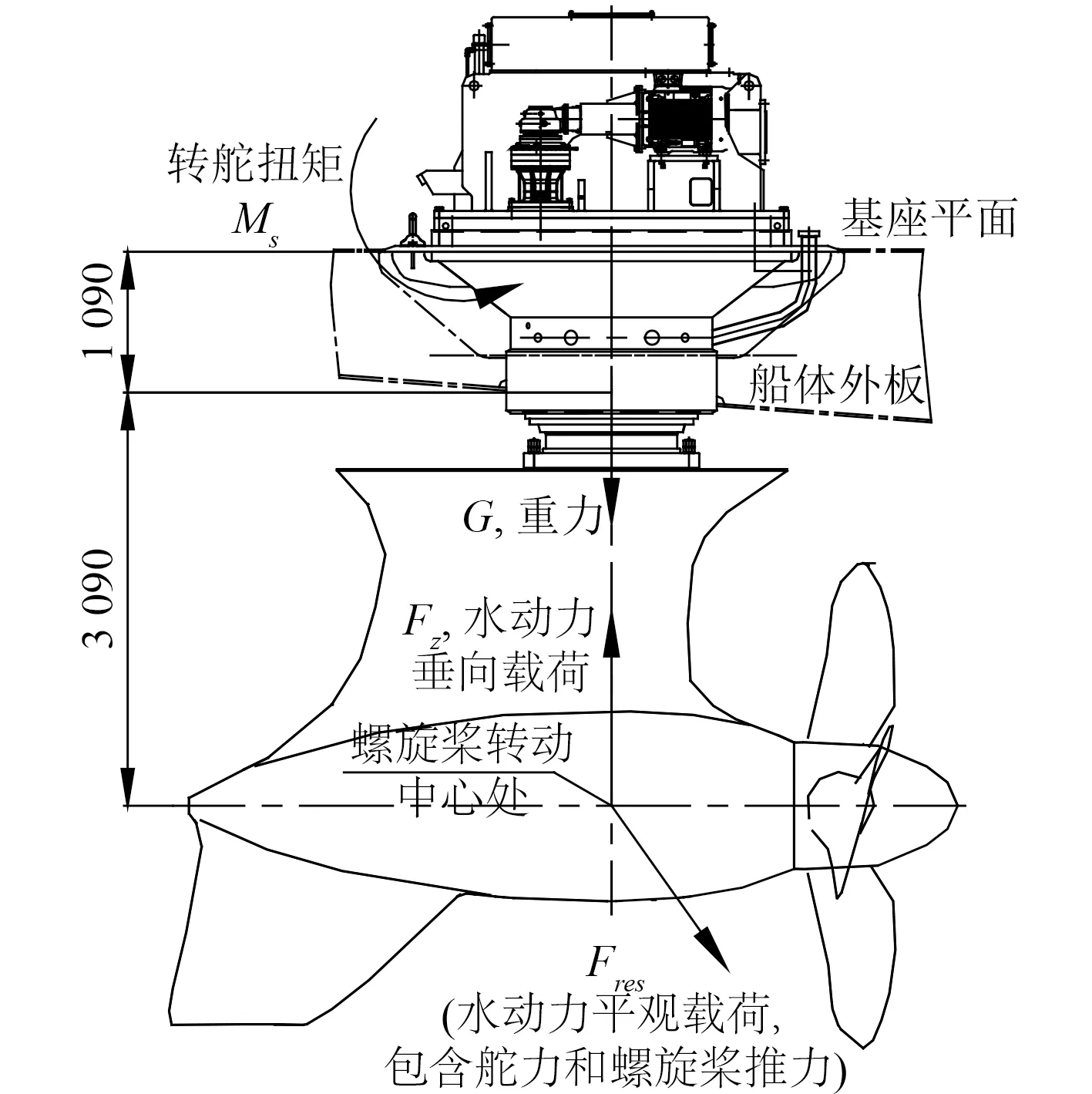
圖5 6 000 噸級科考船推進器受力示意圖Fig. 5 The force of 6 000 tons vessel’s azimuth thruster
由于設備商直接給出了螺旋槳轉動中心處的平面載荷以及垂向載荷,可將其簡化為梁系模型進行分析,其中基座平面處(A點)邊界條件取為剛性固定,船體外板處(B點)邊界條件取為自由支持,螺旋槳轉動中心處(C點)取為自由端,受力簡圖如圖6所示。為求解此超靜定結構,暫不考慮垂直方向的受力,根據力法原理,將其分解為2根單跨梁,如圖7所示。

圖6 推進器受力簡圖Fig. 6 The force sketch of azimuth thruster
利用A點處轉角為0的邊界條件便可求解此梁系結構,其力學方程如下:


圖7 力法分解受力簡圖Fig. 7 The sketch of structural force method
再考慮推進器垂直方向的平衡方程

聯立求解式(1)和式(2),便可最終得出A,B點處的承力解析解:

4 有限元分析驗證
為驗證L型全回轉推進器梁系簡化模型解析解的正確性及合理性,僅以推進器正常工況為研究對象,運用MSC的Patran/Nastran通用軟件進行有限元分析驗證。
4.1 有限元模型
選取全回轉推進器支撐結構作為研究對象,模型縱向范圍為尾封板~FR8水密橫艙壁,橫向范圍為整個船寬,垂向范圍為整個型深。
模型主要采用2D-Shell單元,1D-Beam單元。網格單元大小為200×200 mm左右,高應力區域的網格適當細化。甲板板、艙壁板、主要支撐構件(縱桁和強橫梁)的腹板、基座板用Shell單元模擬,主要支撐構件面板用Beam單元模擬。
模型的邊界條件為在FR8水密橫艙壁處進行簡支,約束X、Y、Z方向的位移,有限元模型如圖8所示。
4.2 載荷工況
推進器載荷(重力G,水動力平面載荷Fres,水動力垂向載荷Fz以及轉舵扭矩Ms)由羅爾斯·羅伊斯公司提供,根據設備商資料,該船全回轉推進器有2種運行模式,即巡航模式和機動模式。

圖8 有限元模型Fig. 8 Finite element model
巡航模式最大允許角度范圍為+/-35°,為推進器在最大功率和轉速下運行;機動模式可以360°旋轉但功率受到限制,僅承受螺旋槳推力且只能在10 kn航速以下使用。最終選定0°,+/-15°,+/-35°,+/-60°,+/-90°,+/-120°,+/-150°以及180°共計14種典型方位角進行有限元校核,在進行有限元分析時重力考慮1.8倍船體加速度,其余載荷考慮1.25倍的安全系數。
選擇2種載荷施加方式來進行推進器支撐結構有限元分析:
1)由于推進器自身剛度足夠強,可將該推進器模擬單元作近似剛性體處理從而建立推進器的3D簡化模型,采用MPC形式,將設備商提供的推進器載荷直接加載到螺旋槳轉動中心處,其加載模型如圖9所示,校核工況如表2所示,此種加載方式后續簡稱簡化模擬加載;
2)去除有限元模型中推進器的模擬單元,運用計算式(3)得到基座平面處(A點)和船體外板處(B點)船體結構的受力解析解,采用MPC形式,將A點和B點載荷分別加載到船體結構處,其加載模型如圖10所示,校核工況如表3所示,此種加載方式后續簡稱解析解加載。

圖9 簡化模擬加載模型Fig. 9 Simplified simulation model

表2 簡化模擬加載校核工況Tab. 2 Loading condition of simplified simulation

圖10 解析解加載模型Fig. 10 Theoretical solution model

表3 解析解加載校核工況Tab. 3 Loading condition of theoretical solution

表4 兩種加載方式計算結果Tab. 4 The result of simplified simulation model and theoretical solution model
4.3 計算結果
通過有限元分析,可得到正常工況下全回轉推進器各角度運轉時支撐結構的正應力、剪應力以及合成應力,應力衡準參照CCS規定。此外,從實船安裝、使用角度出發,座圈結構相對變形即船體支撐結構的剛度問題更值得關注,設備商往往對此相對變形量提出較為嚴苛的要求。所謂相對變形量即全回轉推進器基座法蘭盤安裝面與相鄰區域船體外板間的變形位移差,與設備商確認后將相對變形量的衡準取為1 mm。
讀取有限元結果可得到2種加載方式的應力、變形結果,如表4所示。
由表4可知:
1)該全回轉推進器支撐結構強度滿足CCS規范要求,相對位移量也滿足設備商對船體剛度的要求,其中結構強度裕度較大,這是因為支撐結構的構件尺寸主要由船體剛度決定;
2)2種加載方式應力分布及變形趨勢一致,最大合成應力出現在+35°工況,最大相對變形量出現在-35°工況,但解析解加載方式的計算結果偏安全,這主要源于所采用力學模型在邊界條件、載荷作用形式等方面作出的偏安全簡化。
5 結 語
本文通過對某6 000 噸級科考船L型全回轉推進器船體支撐結構進行設計分析,得出以下結論:
1)單底支撐結構形式在中型科考船上的設計是可行的,能夠同時滿足船級社關于船體強度和設備商關于船體剛度的要求,無須采用剛度更強但形式復雜的雙層底結構,其設計思路和特點可供后續類似船型參考;
2)驗證了L型全回轉推進器梁系簡化模型解析解的正確性與合理性,可用于初始設計階段載荷快速估算,為支撐結構前期設計提供參考,避免后續詳細設計階段的方案修改,亦可直接用于推進器支撐結構的有限元分析。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24