無人機傾斜攝影技術在智慧校園實景三維建模中的應用
2021-12-11 10:01:50占森方李元松陶文華楊毛毛
科技創新與應用 2021年36期
占森方,李元松,陶文華,陳 陣,楊毛毛,姜 珊
(武漢工程大學 土木工程與建筑學院,湖北 武漢430074)
智慧城市理念自2008年誕生以來,在國際上引起廣泛關注并持續發展[1],教育行業作為智慧城市的重要組成部分被社會各界重點關注,2010年浙江大學提出智慧校園概念[2],智慧校園作為未來校園發展的新理念和新實踐,成為學術界和教育界關注的焦點。近年來,國家相關部門相繼出臺了智慧校園建設規范標準,2018年發布的《智慧校園總體框架(GB/T 36342-2018)》提出基于地理信息技術、虛擬現實技術、計算機圖形學等高新技術,以真實校園整體為藍本,構建三維可視化的逼真校園環境和景觀。
傳統的三維建模技術通常使用3ds Max、AutoCAD等建模軟件,基于影像數據、CAD平面圖進行人工建模,這種方法建設周期長、成本高、與真實世界反差大[3];近年來,隨著小型無人機技術的進步與成熟,傾斜攝影測量技術得到迅猛發展,該技術以大范圍、高清晰、高精度的方式全面感知復雜場景,通過高效的數據采集設備及專業的數據處理流程生產的三維模型直觀地反映地物的外觀、位置、高度等屬性,建設周期短、生產效率高、成本低,如今已成為實景三維建模的主流趨勢。
1 無人機傾斜攝影技術
無人機傾斜攝影技術是以無人機作為空中平臺,結合GPS差分定位、攝影機和遙感傳感器等技術,獲取高精度、高分辨率的影像等信息,應用于勘探、測繪、建模等方向的先進新興綜合技術[4]。無人機傾斜攝影技術路線如圖1所示。
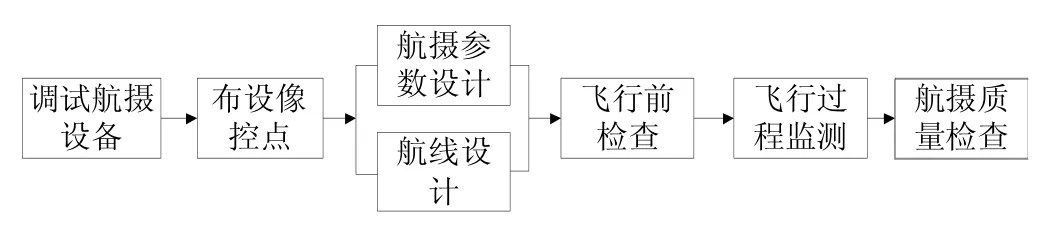
圖1 無人機傾斜攝影技術路線
1.1 布設像控點
像控點是無人機傾斜攝影業內影像解析和建模的基礎,用于糾正無人機因定位受限或電磁干擾而產生的位置偏移、坐標精度過低以及因氣壓計產生的高層差值過大等問題。像控點布設要求均勻分布在航攝區域航向和旁向重疊范圍內,像控點選點應選在平坦、相對固定易于準確測量、目標影像清晰且易于判刺的地方[5],做好易于分辨且不易被破壞的標記,一般采用標靶式或油漆式像控點標記。
1.2 航攝參數設計
航攝參數設計主要包括地面分辨率、航行高度和像片重疊度等。
1.2.1 地面分辨率
地面分辨率(GSD)是指每毫米所能辨別的黑白相隔的線對數(線對/毫米),通常以像元的大小來表示,一般像元越小,地面分辨率越高,信息量越大。GSD應根據航攝成圖的比例尺、地形等條件確定,通常參考表1。

表1 地面分辨率取值參考
1.2.2 航行高度
航行高度由相機參數和地面分辨率所決定,計算公式如式(1)所示。對提高建模精度而言,適當調低航行高度有一定效果,但如果航高過低會導致像片數量過多,增加外業像控和內業建模的工作量,并且航高過低會增大安全風險[6]。《低空數字航空攝影規范》規定:攝影分區內地形高差不應大于1/6航高。因此,應綜合考慮建模精度、工作量、規范和安全等因素,在滿足各項技術精度指標的前提下,確定相對適宜的航高。

式中:H-航行高度,單位為m;f-鏡頭焦距,單位為mm;GSD-地面分辨率,單位為m;α-像元尺寸,單位為mm。
1.2.3 重疊度
航向重疊度是指一條航線上兩張相鄰像片的重復率,一般取60%~80%;旁向重疊度是指兩條相鄰航線上像片之間的重復率,一般取30%~75%。重疊度計算公式如式(2)所示。由式(2)可知,重疊度由相較于基準面的高差Δh決定,Δh為0時,重疊度與標準值相同,因此在設計像片重疊度時要考慮高差因素,一般適當增加重疊度以滿足精度要求。

式中:pX,qY-像片上的航向重疊度和旁向重疊度(%);p′X,q′Y-航攝像片的航向和旁向標準重疊度(%);Δh-相對于攝影基準面的高差,單位為m;H-攝影航高,單位為m。
1.3 航線敷設
確定航高、重疊度之后,計算航線距離,航線距離即為相鄰兩航帶間隔,其計算公式如式(3)所示。通過計算確定航線距離后,按測區實際情況計算航線條數,敷設航線,航線通常按照東-西向敷設,帶狀范圍沿著窄邊飛行為宜。航線規劃完成后,需勘察地形,選擇合適的起降場地,應避開禁飛區或影響飛行安全的建筑,選擇行人較少、視野開闊的區域。

式中:Sx-航線距離,單位為m;Mi-旁向重疊度(%);Ki-絕對航高,單位為m;Ji-最高點高程,單位為m;b-鏡頭焦距,單位為mm;m-底片寬度,單位為mm。
2 實景三維建模技術
對獲取的無人機遙感影像進行處理,首先確定所采用的坐標系統,將采集到的坐標數據向目標坐標系進行轉換,結合影像的POS數據、布設的像控點等信息進行空中三角測量[7],然后通過圖像幾何畸變校正、圖像增強、影像拼接等處理,生產三維模型。處理遙感影像的三維建模過程如圖2所示。
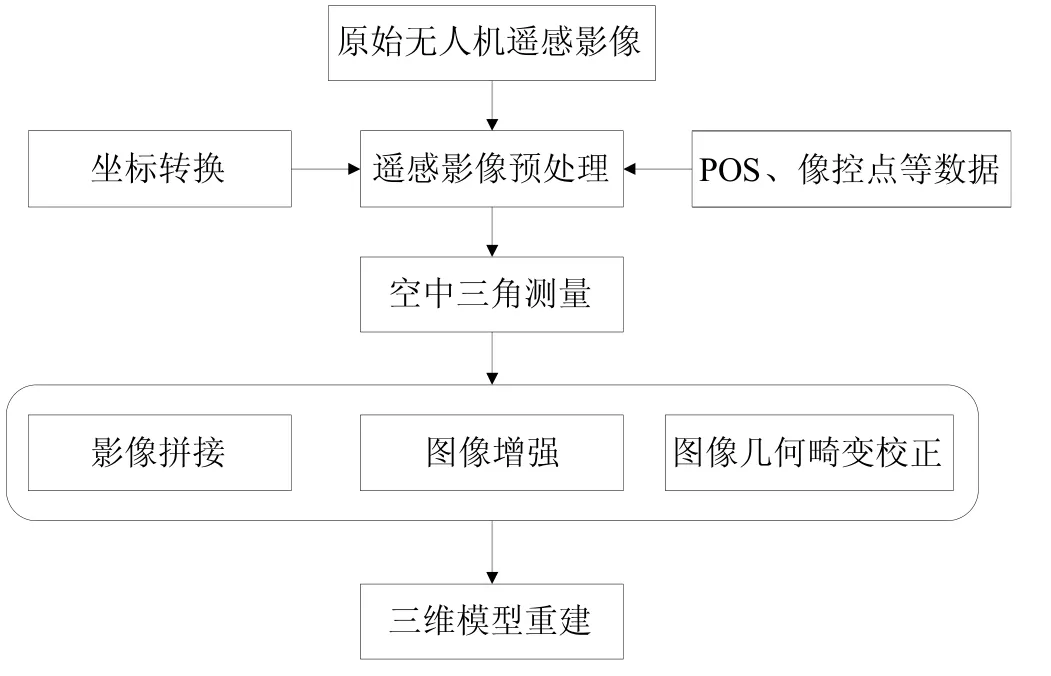
圖2 遙感影像三維建模流程
目前,Context Capture、PhotoScan以及Pix4Dmapper是業界主流的傾斜攝影建模平臺,通過建模速度、模型精度、工作量等方面對三款軟件進行對比,如表2所示,綜合考慮選擇Context Capture作為校園實景三維模型建模平臺。在模型生產過程中,受到航攝盲區、像片質量及POS參數準確度等問題的影響,會造成模型部分區域空洞、扭曲、映射錯誤、紋理丟失等[8],Dp Modeler可以對實景三維模型進行踏平、橋接、補洞、紋理修改等操作,實現模型整體修飾,因此本文采用Dp Modeler對實景三維模型進行精細化處理。
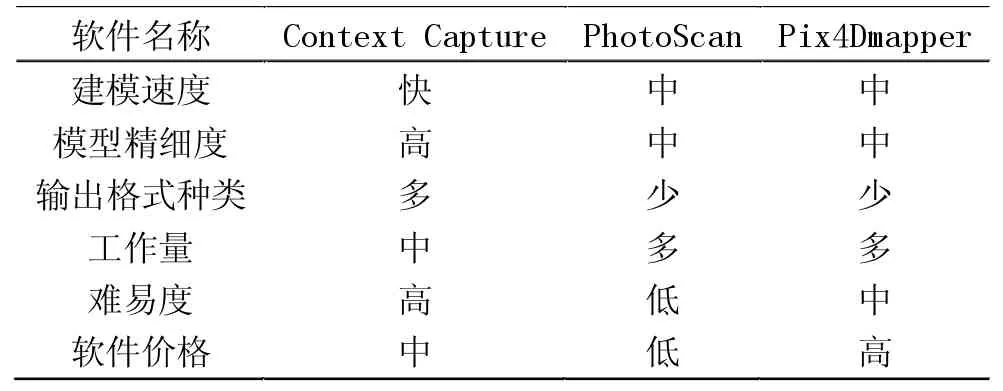
表2 建模軟件綜合對比
3 校園實景三維建模應用
3.1 獲取校園遙感影像
以武漢工程大學武昌校區為例,使用大疆御Mavic 2雙光行業版無人機作為航攝設備,飛行器參數見表3,相機參數見表4。由于學校附近存在禁飛區,因此選取遠離禁飛區的校園區域作為試驗區,試驗區面積500m×500m,劃分為一個航攝區域,使用航拍板在航攝區域內均勻布設五個像控點并測量像控點坐標、高程。由于試驗區面積不大,因此成圖比例尺取1:500,根據表1將地面分辨率設置為5cm,由表4可知相機像元尺寸為0.012mm,根據表4將相機焦距設置為35mm,通過式(1)計算航行高度,應設置為150m。試驗區內建筑密集,根據《低空數字航空攝影規范》規定和大疆御Mavic 2航攝設備精度要求,適當提高重疊度,航向重疊度設置為70%,旁向重疊度設置為60%。試驗區最高建筑30m,根據式(3)和表4相機參數計算航線距離,應設置為90m,試驗區寬度500m,故應布設6條航線。
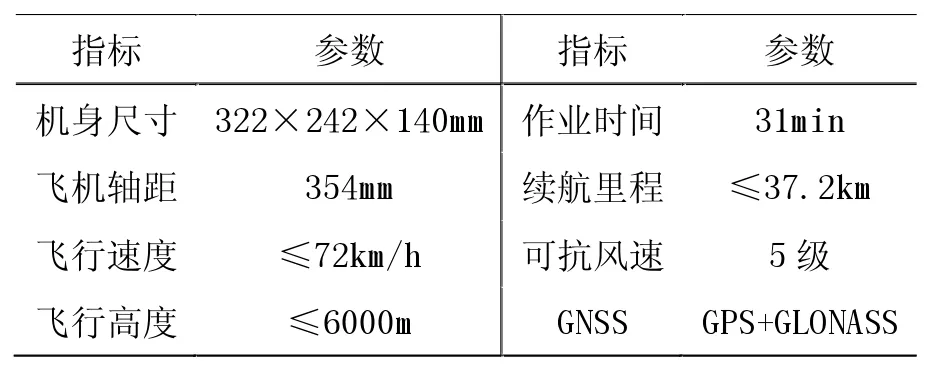
表3 飛行器參數
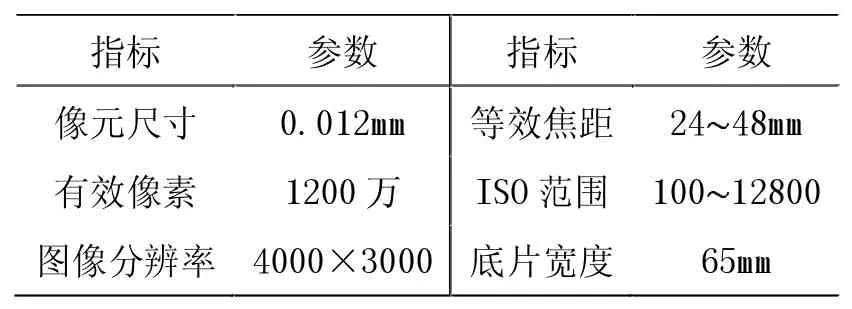
表4 相機參數
選擇晴朗、無風、少云的天氣進行航攝任務,在無人機遙感控制器中劃分測區,輸入上述參數,無人機自動生成最優航攝路線、飛行速度、攝影間隔等,選擇空曠無人、視野開闊的起降地點,開始航攝任務,在無人機執行任務時監測無人機狀態,確保航攝設備正常工作,無人機任務結束后檢查影像質量,共獲得242幅有效影像。
3.2 校園實景三維建模
使用Context Capture處理傾斜攝影獲取的遙感影像,新建一個工程,導入遙感影像,檢查影像完整性,將外業測量的控制點信息通過像片刺點輸入到建模系統中,將像片POS信息輸入系統中,進行空中三角測量運算。空中三角測量運算完成后提交模型重建項目,輸入空間參考坐標,為模型生產項目劃分瓦片,進行實景三維模型重建。三維模型重建完成后使用Dp Modeler對模型進行精細化優化,填補模型空洞,將模型扭曲部分踏平,修飾紋理,試驗區實景三維建模結果如圖3所示。校園實景三維模型通過LOD Tree Export向校內師生和社會人士展示,能夠提高模型的渲染度,并且提供漫游功能,完美展現校園風貌。
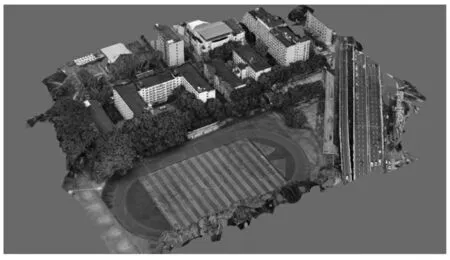
圖3 試驗區實景三維模型
4 結束語
通過無人機傾斜攝影技術、三維建模技術,以武漢工程大學武昌校區為試驗區,進行實景三維建模試驗,其效果良好,可以應用于智慧校園建設。還可以進一步使用GIS處理三維模型,為模型各建筑物、道路等創建節點,基于物聯網技術,在現實中使用近場通信等技術關聯各節點,實時更新節點信息,用戶通過點擊模型節點可以查詢實時信息,例如教學活動情況、社團活動情況等,實現虛擬世界與現實世界的關聯,進一步實現校園智慧化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2018年9期)2018-10-23 19:25:02
南方周末(2018-06-28)2018-06-28 08:11:04
琴童(2017年3期)2017-04-05 14:49:04
小天使·二年級語數英綜合(2017年3期)2017-04-01 17:17:48
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中學生天地(A版)(2015年5期)2015-06-01 02:46:03