基于YOLO v3 的微生物目標檢測研究
2021-12-13 07:31:36楊龍飛王海龍劉婉瑩張宇軒吳開帥紀曉娜田曦
科學技術創新 2021年33期
楊龍飛 王海龍 劉婉瑩 張宇軒 吳開帥 紀曉娜,3 田曦,3*
(1、長春工程學院,吉林長春 130012 2、吉林省天恒水務工程有限公司,吉林長春 130000 3、吉林省城市污水處理重點實驗室,吉林長春 130012)
活性污泥法污水處理工藝是利用活性污泥中的微生物具有吸附和氧化的能力,分解去除污水中的有機污染物達到凈水目的。活性污泥狀態良好時才可以使出水水質達標,故而活性污泥狀態的檢測是保障出水水質達標的第一道關卡。
利用活性污泥中的指示性微生物種類即可得知活性污泥的狀態。傳統的活性污泥狀態檢測手段使用電子顯微鏡觀察活性污泥中的微生物種類,最終人工判斷活性污泥的狀態。目前其具有如下缺點:需要提取泥樣,制作玻片樣本,操作顯微鏡,人工分析判斷這四個繁瑣的步驟;指示微生物從增殖到生物相處于穩定需要時間,若活性污泥狀態發生急劇變化不能實現即時檢測診斷。針對這一系列問題,使用人工智能目標檢測手段可以實現微生物種類的快速識別的方式即可解決。未來可通過識別出的結果對應當下生物處理池內環境,匹配水廠自動化設備,通過調節池內各項環境因素使活性污泥始終保持良好的狀態。
1 主流的深度學習目標檢測算法
圖像目標檢測是人工智能的關鍵領域之一。基于深度學習的目標檢測算法也愈加成熟,此類算法具有自己學習的能力,檢測速度較快,并且檢測精度較高,已經在各種視覺檢測場景中被采用。目前主流的基于深度學習的目標檢測算法主要分為了如下兩個流派類別。
1.1 兩階段目標檢測算法
此類算法是將目標檢測分為兩個階段,第一階段使用候選區域生成網絡(Region Proposal Network,RPN)生成一個有可能包含待檢物體的候選框,第二階段利用卷積神經網絡完成對候選框中候選目標位置與類別的預測及識別[1]。常見的兩階段目標檢測算法有R-CNN(Region-Conventional Neural Network)、Fast R-CNN[2]、Faster R-CNN。
1.1.1 R-CNN 目標檢測算法
R-CNN 引入卷積神經網絡自動學習如何更好地提取特征。但是R-CNN 算法本身存在很多缺陷在提取特征向量時,每個候選區域都會被單獨地從原圖上裁剪下來,再依次輸入神經網絡,這樣做占用了大量磁盤空間,也帶來了很多重復性計算,導致訓練速度和推斷速度都非常緩慢。
1.1.2 Fast R-CNN 目標檢測算法
Fast R-CNN 不再使用支持向量機進行分類, 其直接訓練CNN 在兩個新的網絡分支上分別進行分類和回歸。這種結構雖然解決了存儲空間的問題,然而在訓練時能及識別精度上改進空間較少。
1.1.3 Faster R-CNN 目標檢測算法
Ren 等人提出了Faster R-CNN 算法。該算法最大的創新點在于設計了RPN 這樣一個候選框生成網絡。有了RPN 取代選擇性搜索算法,Faster R-CNN 最終在GPU 上的檢測速度達到了5FPS。該算法是第一個真正實現了端到端訓練的檢測算法,標志著兩階段檢測器的正式成型,然而兩階段目標檢測算法在真正投入使用中檢測速度遠遠大于單階段目標檢測算法,不能滿足于我們實時微生物檢測的設想。
1.2 單階段目標檢測算法
單階段目標檢測算法不使用RPN,直接在卷積神經網絡中提取特征來預測物體分類和位置信息,是一種端到端的目標檢測算法[3-4],因此單階段目標檢測算法具有更快的檢測速度。常見的單階段目標檢測算法有SSD (Single Shot multibox Detector)、YOLOv1(You Only Look Once)、YOLO V2、YOLO-V3等。
1.2.1 OverFeat 目標檢測算法
Sermanent 等人于2013 年提出的OverFeat 是最早的一階段檢測器。雖然它的精度不如同期R-CNN,但其思想很有前瞻性,使得OverFeat 比R-CNN 的檢測速度快了9 倍。然而OverFeat 采用了多尺度貪婪的劃窗策略,導致計算量很大,沒有考慮多尺度特征融合,對小目標效果差,整體的檢測效果不盡人意。
1.2.2 YOLOv1 目標檢測算法
2015 年,Redmon 提出的YOLOv1 算法則真正地實現了實時性目標檢測。YOLOv1 的缺點有定位不夠準確,找回率低。并且YOLOV1 預訓練的時候會導致分類切換到檢測的時候,模型需要適應圖像分辨率的改變,該算法還有極大的改進空間。
1.2.3 YOLOv2 目標檢測算法
YOLOv2 吸取了很多深度學習的技巧,最終在速度、精度上均得到提高。但是YOLOv2 把多尺度考慮到訓練的data 采樣上,導致相鄰很近的物體還有很小的物體檢測的效果不是很好,尤其同一類物體中出現的不常見的長寬比和其他情況時,泛化能力會弱一些,對于如微生物這種小目標的檢測能力不足。
1.2.4 YOLOv3 目標檢測算法
Redmon 等人再次進行升級,提出了YOLOv3。其實現了最好的速度與精度的權衡,逐漸提升對小目標的檢測能力,同時實現了對高覆蓋率圖像的精準檢測,且結構簡單、背景誤檢率低,也是目前工業界目標檢測的首選算法之一。在保持速度優勢的前提下,提升了預測精度,尤其是加強了對小物體的識別能力,綜合其檢測能力及檢測速度是目前最適合識別微生物的深度學習算法。
2 基于YOLOv3 的目標檢測平臺特點
2.1 使用Darknet53 主干特征提取網絡
YoloV3 所使用的主干特征提取網絡為Darknet53,它具有一個重要特點是使用了殘差網絡,特點是容易優化,能夠通過增加相當的深度來提高準確率。殘差塊的使用了跳躍連接,緩解了在深度神經網絡中增加深度帶來的梯度消失問題。
2.2 構建FPN 特征金字塔和利用Yolo Head
從特征中提取預測結果,在此過程中可分為兩個部分,分別是構建FPN 特征金字塔進行加強特征提取和利用Yolo Head對三個有效特征層進行預測,特征金字塔可以將不同shape 的特征層進行特征融合,有利于提取出更好的特征。
利用Yolo Head 獲得預測結果,利用FPN 特征金字塔,我們可以獲得三個加強特征,然后我們利用這三個特征層傳入Yolo Head 獲得預測結果。
圖1 為YOLOv3 深度學習思想搭建目標檢測平臺的思路示意圖。
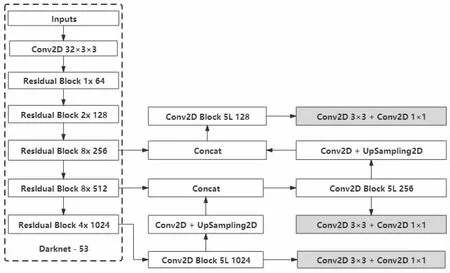
圖1
3 基于YOLOv3 的微生物目標檢測平臺展望
3.1 使用YOLOv3 解決微生物識別的問題
針對在活性污泥中微生物的檢測場景中往往會出現受到遮擋,且有些微生物移動速度較快相機難以捕捉等問題。憑借YOLOv3 算法極快的檢測速度,以及對微小物體準確的識別能力,可以實現活性污泥中微生物種類的精準快速識別。
以aeroplane ;Bicycle;bird;等傳統圖像作為識別目標為例,該算法有較強特征提取能力,有著較高的精確度且在識別速度在40ms-60ms,能夠滿足微生物識別的所需的準確及快速的要求。(圖2)

圖2
3.2 使用YOLOv3 在微生物識別中的能力表現
使用復雜場景中包含多目標的圖片進行測試表明:基于YOLOv3 的微生物目標檢測平臺,具備復雜環境下對于較小型目標的檢測能力。(圖3)
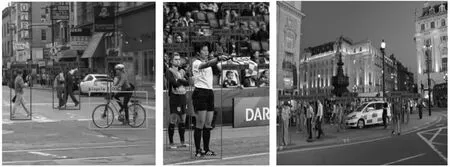
圖3
基于YOLOv3 目標檢測算法搭建的目標檢測平臺是適用于微生物種類識別的,還有提高檢測能力并改進的方向:
(1)在制作活性污泥中微生物的數據集時,使用高分辨率相機拍攝圖片,通過圖片預處理手段進行數據集特征增強。要針對某一微生物進行大量的數據集制作。
(2)在訓練階段,選取合適的預訓練權重,訓練時關注loss和val-loss 值的變化,規避過擬合。
(3)加入如今的針對小尺度目標檢測的新思想,如引進基于上下文信息的小目標檢測思想,改進錨點分布思想等。
4 結論
目前基于深度學習的目標檢測方法已經涉及各行各業,若在傳統的污水處理領域加以利用,可實現對于活性污泥中微生物種類的快速識別,未來通過對比微生物種類及當下生物處理池中的各項環境指標,實時判斷出活性污泥的狀態是否異常。配套污水處理廠的自動化控制系統,調節生物處理池內的環境參數,保證活性污泥的良好狀態,如此設想可為污水處理保駕護航的同時大大降低人工勞動成本。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54