
基于領航跟隨的多機器人編隊控制方法
2021-12-13 14:36:52高繼勛黃全振趙媛媛
中國測試 2021年11期
關鍵詞:實驗
高繼勛,黃全振,趙媛媛
(1.河南工程學院計算機學院,河南 鄭州 451191; 2.河南工程學院電氣信息學院,河南 鄭州 451191;3.鄭州工程技術學院,河南 鄭州450044)
0 引 言
隨著人工智能時代的到來,多機器人的控制已逐漸成為研究熱點[1-6],其應用場景包括但不限于農業、軍事、航空等領域。在多機器人編隊的協同控制過程中,通常所期望隊形是可變的,以便于應對單個機器人無法完成的復雜任務。在極坐標下,利用線性反饋的方法建立“距離-角度”控制器模型,完成對多機器人編隊控制[7]。由于奇異點存在,該控制器存在一定問題。可通過將極坐標投影到笛卡爾坐標系下,重新建立控制模型解決奇異點問題[8-9]。鐘宜生等[10]提出,將多機器人可變編隊問題描述為“不變的隊形在可變的坐標系中運動”的編隊控制問題。在上述基礎上,李清東[11]提出用多個不變隊形互相切換,以完成編隊控制。劉磊[12]采用以差速輪式機器人為研究對象,通過仿真驗證該控制方法的可行性。
目前對于解決多機器人一般性編隊控制問題,公開文獻中尚未見到成熟方案。現階段主要有人工勢場法[13]、基于行為法[14]、虛擬結構法[15]和領航-跟隨法[16]。上述方法各有其優缺點,相比較而言,領航-跟隨法的控制更簡單,只需調整跟隨者與領航者的運動參數即可完成跟蹤控制,具有較好的穩定性和靈活性[17-20]。
根據上述情況,本文提出了一種新穎的機器人編隊控制方法,該方法基于領航-跟隨法,引入“虛擬領航機器人”,將其他機器人作為跟隨者,建立控制模型,從而將編隊問題轉化為跟蹤控制問題。根據提出的控制算法,本文設計了跟隨誤差控制器,分析跟隨誤差及其收斂性。通過仿真與實驗結果分析,驗證本文提出的改進型領航-跟隨控制方法在一致性控制中的有效性與穩定性。
1 問題描述和模型構建
1.1 問題描述
基于領航-跟隨法,可將編隊問題轉化為跟隨機器人對虛擬領航機器人的軌跡跟蹤,該方法只需獲得虛擬領航者的運動參數和位姿即可實現跟蹤控制,一定程度上減少相互之間信息冗余及計算量。通過上述方法,建立虛擬領航機器人與跟隨機器人運動模型,如圖1所示。
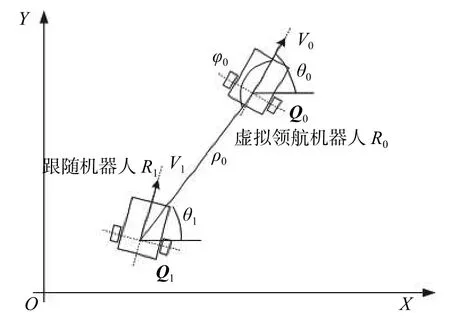
圖1 領航-跟隨結構示意圖
圖中,跟隨機器人R1與虛擬領航機器人R0的距離是ρ0,二者中心線連線與虛擬領航機器人R0軸心線的夾角是φ0。通過虛擬領航者的引入,將編隊控制轉化為跟隨移動機器人R1對虛擬領航機器人R0的軌跡跟蹤,即跟隨機器人R1在一定時間內跟隨虛擬領航機器人R0運動就可組成相應的編隊。
1.2 模型構建
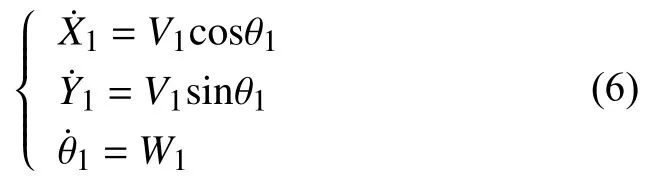
非完整移動機器人的運動學模型[15]如下式:

由圖1可知,當跟隨機器人R1與虛擬領航機器人R0之間的位姿(位置和姿態)誤差趨近于零,即:

假設在t時刻,虛擬領航機器人與期望軌跡運動示意圖如圖2所示。
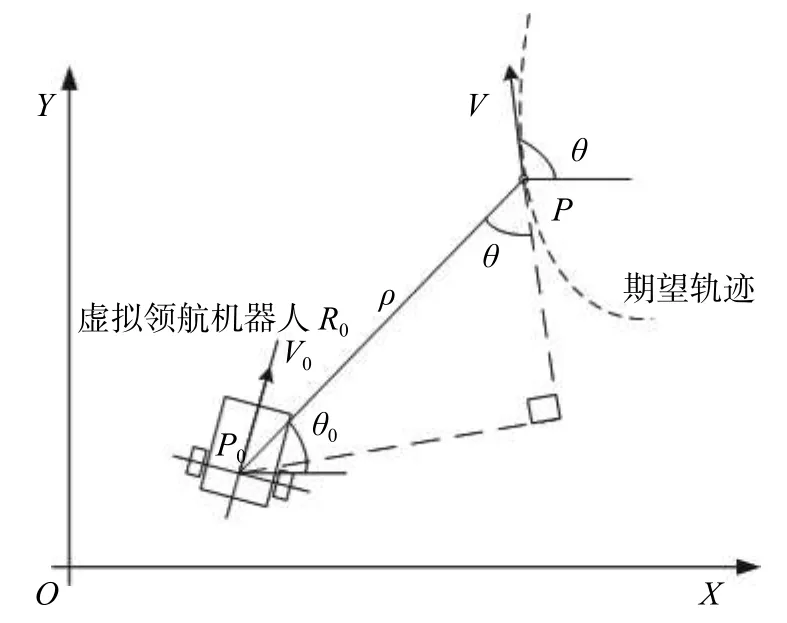
圖2 跟蹤位置示意圖
其中,V為期望軌跡上P點的運動方向,與X軸正方向夾角為θ。P0P為虛擬領航機器人與期望軌跡上P點的連線。P點狀態表示為(X,Y,θ)。
虛擬領航機器人與期望軌跡誤差參數表示為:


通過對參數λ的調整,可完成跟隨機器人相對于期望軌跡的控制。
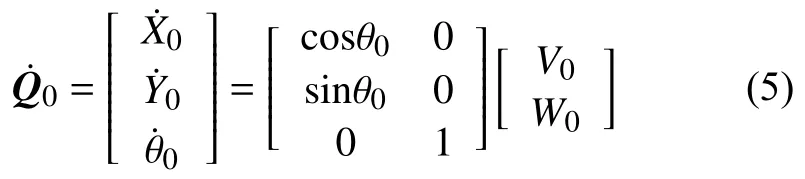
虛擬領航機器人運動學模型可表示為:
跟隨機器人參考軌跡模型為:
根據期望軌跡P點狀態及公式(4)可得到虛擬領航機器人位姿,其數學表達式如下:

2 控制器設計
跟隨機器人R1與虛擬領航機器人R0位姿誤差為ei,則ei可表示為:



其中,K1,K2,K3為正數。
定義Lyapunov函數VL為:


以上構建了基于領航跟隨運動控制方法的控制器,并且證明了該控制器的穩定性。下面對該方法進行仿真與實驗研究。
3 仿真分析與實驗驗證
為驗證系統及控制算法的正確性和有效性,利用仿真軟件和硬件平臺構建模擬/物理實驗系統進行驗證。仿真采取與期望軌跡重合(追蹤)、與期望軌跡保持固定隊形(編隊)兩種情況進行,便于在不同控制場景下對結果分析。
3.1 仿真分析
仿真研究基于Gazebo機器人仿真軟件構建的運動學與控制仿真平臺。仿真固定參數以實際硬件平臺為參考,其固定參數值如表1所示。
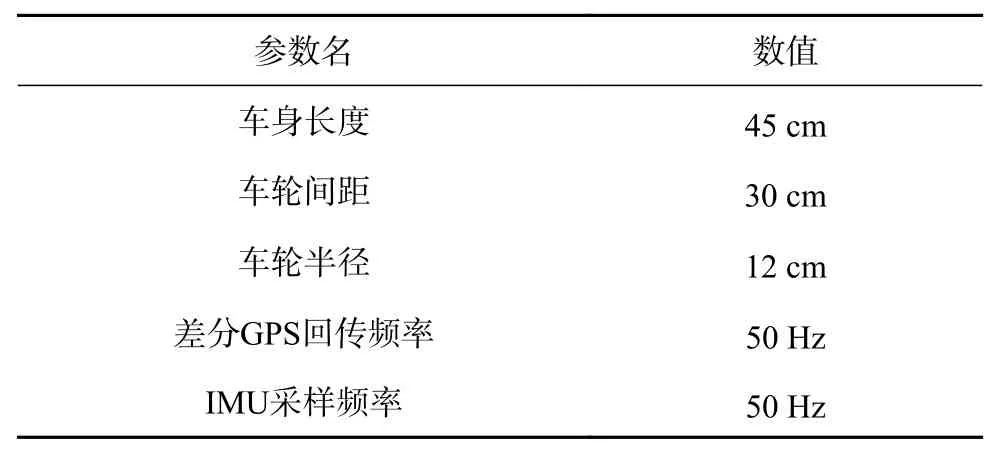
表1 仿真基本參數
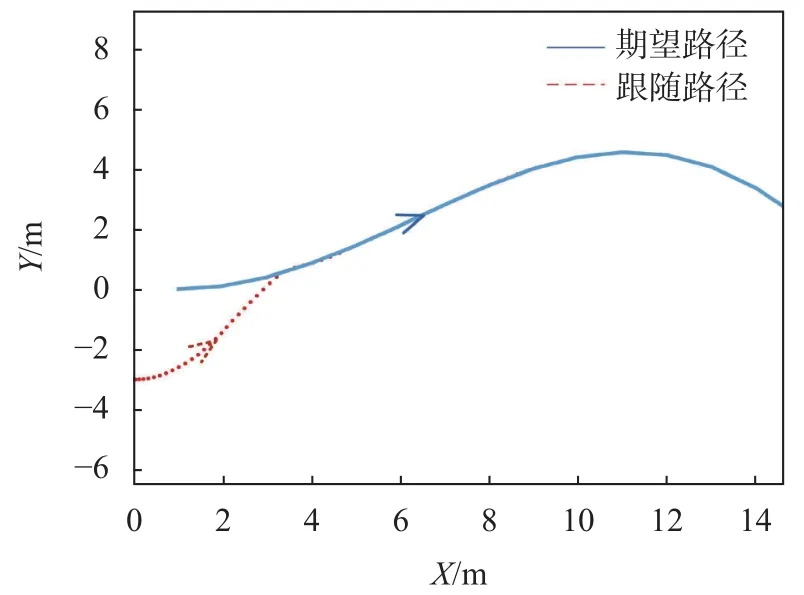
圖3 λ=[0 0]T跟隨機器人仿真運動軌跡
跟隨機器人從任意初始位置開始運動,速度變化曲線如圖4中虛線所示。由圖可以看出,時間T從5 s左右速度開始變化,隨后減小;從20 s左右開始,跟隨機器人速度趨于穩定;30 s時,跟隨機器人速度穩定在 0.8 m/s。
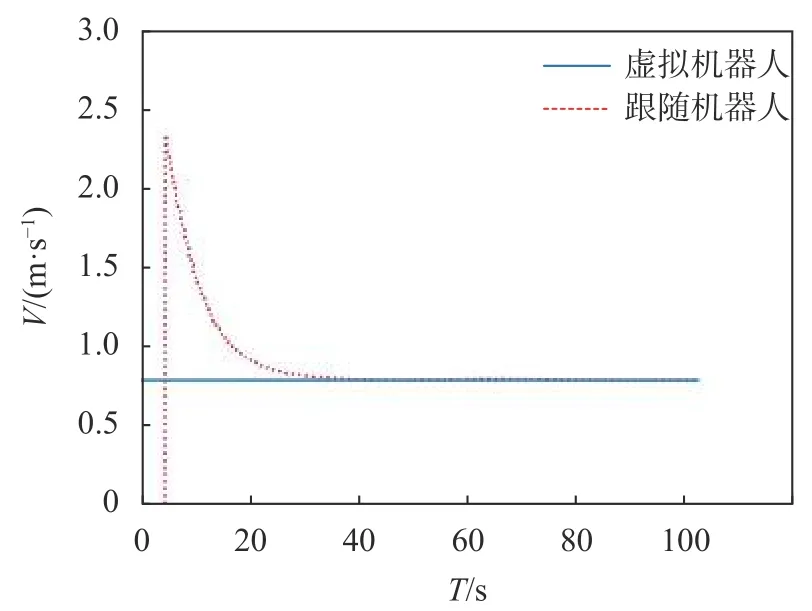
圖4 λ=[0 0]T跟隨機器人仿真速度曲線
設定虛擬領航機器人與期望路徑距離為0.5 m,與速度方向夾角為π/6,即λ=[0.5 π/6]T。假設虛擬領航機器人速度為0.8 m/s,角速度為16 rad/s。即在某時刻,虛擬領航機器人中心線與期望軌跡連線長度為0.5 m,與期望軌跡該點切線方向夾角為π/6。跟隨機器人運動軌跡如圖5所示,其中,X、Y為機器人所處平面坐標,三角形為期望結構,端點為運動軌跡與虛擬機器人期望位置。
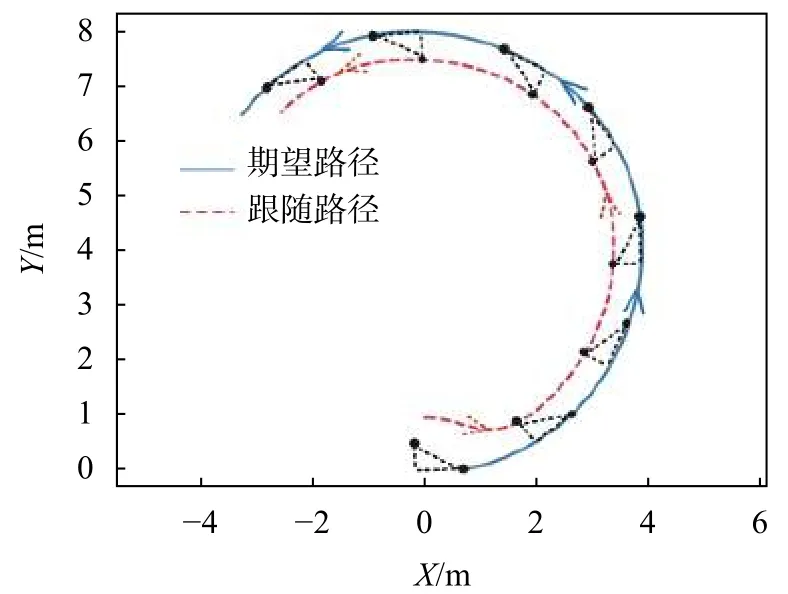
圖5 λ=[0.5 π/6]T跟隨機器人仿真運動軌跡
跟隨機器人速度變化曲線如圖6中虛線所示。當時間T從25 s開始,跟隨機器人速度趨于穩定;40 s時,跟隨機器人速度穩定在0.8 m/s。
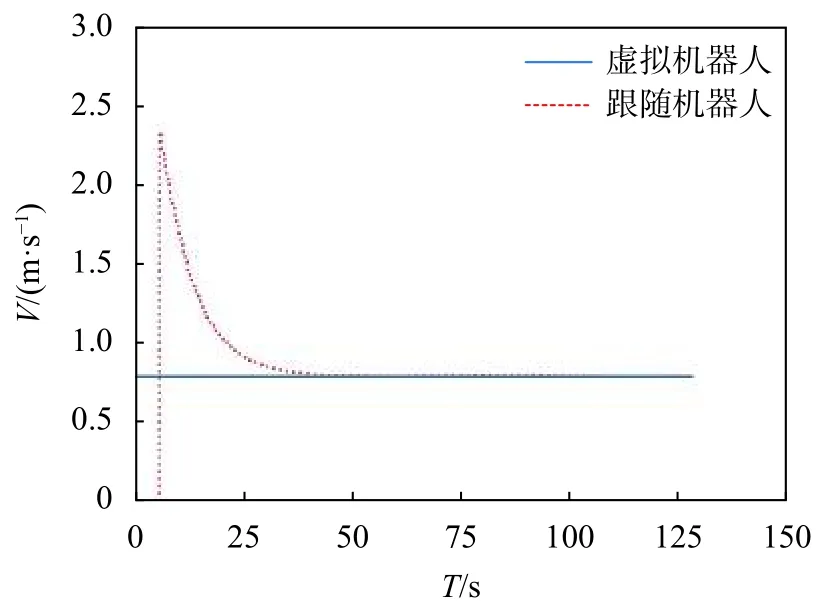
圖6 λ=[0.5 π/6]T跟隨機器人仿真速度曲線
3.2 實驗驗證
為移動機器人控制構建物理實驗系統。該實驗系統的硬件部分主要由雙輪差速驅動底盤、IMU模塊、差分GPS定位模塊(RTK)和主計算機(Raspberry Pi4B)組成。
主計算機主要通過傳感器模塊采集到的數據進行運動狀態計算,并且通過輸出控制指令完成對底盤的運動控制;底盤執行主計算機的控制指令,按照控制指令完成運動;IMU模塊為九軸慣性測量模塊,用于測量機器人的運動狀態,包括加速度和航向角等;差分GPS定位模塊實現機器人的實時定位功能,具體實現為:將差分GPS移動接收端安裝于機器人的底盤上,通過接收衛星與基準站數據進行差分計算,從而提高機器人的定位精度。
實驗平臺示意圖及實物圖如圖7、圖8所示。
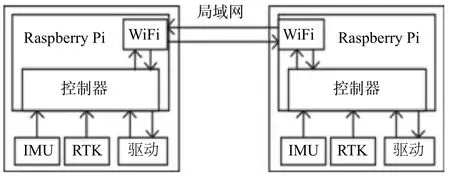
圖7 實驗平臺示意圖
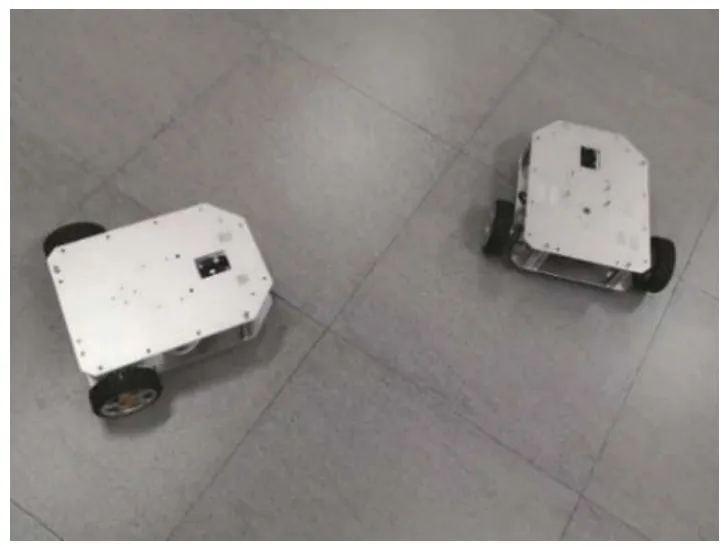
圖8 實驗平臺實物圖
程序流程如圖9所示。首先對跟隨機器人進行狀態初始化;然后根據GPS和IMU回傳數據計算,并于期望位姿做姿態解算;通過結算結果,得到控制輸入參數;最后輸出給控制單元,并實時對跟隨機器人狀態進行監測,判斷其是否達到預期位姿。
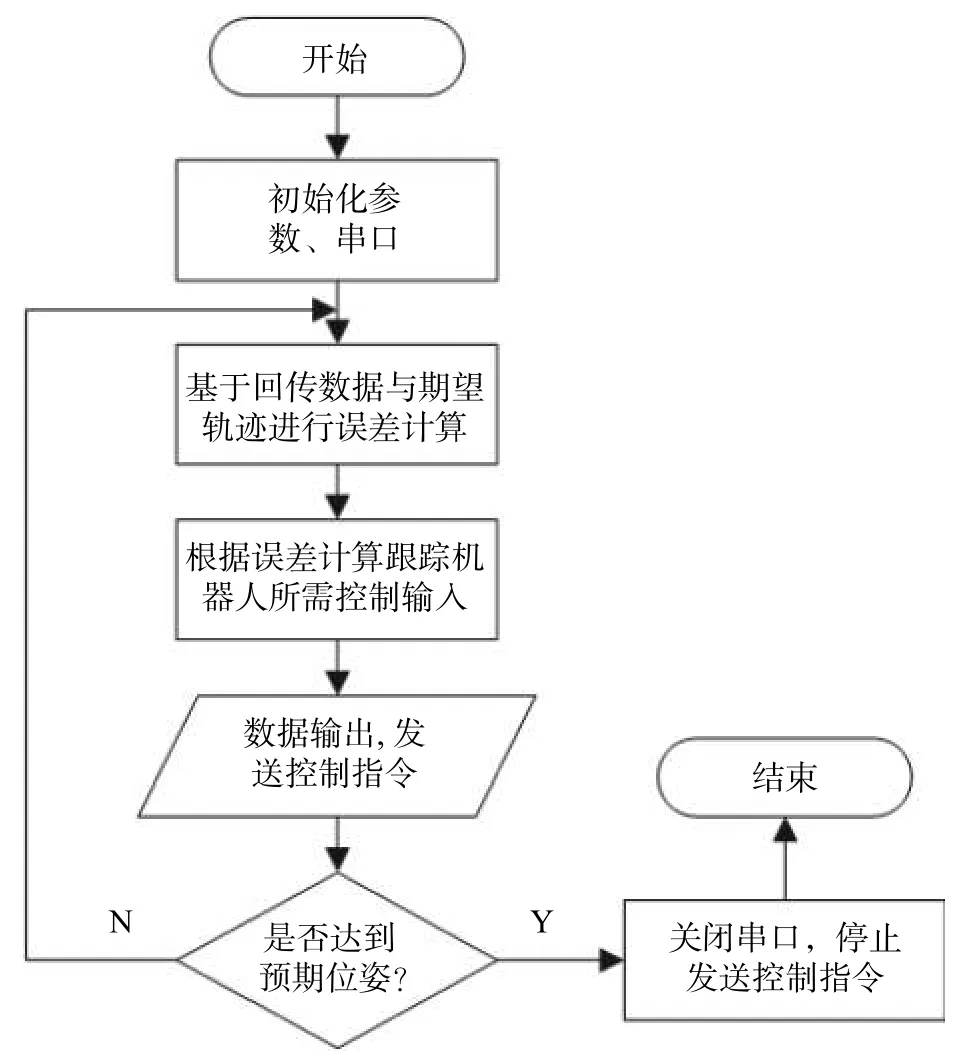
圖9 跟隨機器人控制實驗流程圖
根據預設期望軌跡與虛擬領航機器人的當前位姿誤差,計算跟隨機器人所需控制輸入參數,然后通過串口將運動控制指令發送給運動底盤。如此循環。
設定虛擬領航機器人與期望軌跡重合,即λ=[0 0]T。假設任意初始位置,虛擬領航機器人以速度為0.8 m/s,角速度為0勻速運動。跟隨機器人運動軌跡如圖10所示。其中,X、Y為機器人所處二維平面。
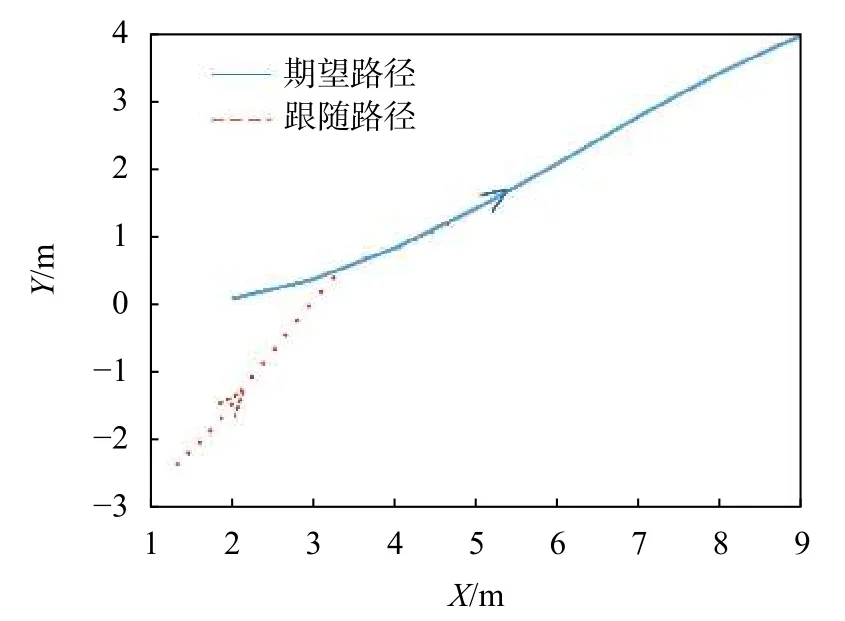
圖10 λ=[0 0]T跟隨機器人實驗運動軌跡
跟隨機器人速度變化曲線如圖11中虛線所示。當時間T從20 s開始,跟隨機器人速度趨于穩定;35 s時,跟隨機器人速度穩定在0.8 m/s。
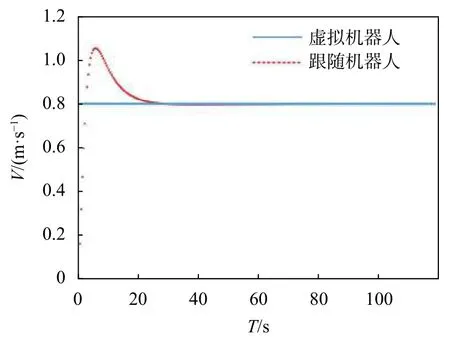
圖11 λ=[0 0]T跟隨機器人實驗速度曲線
設定虛擬領航機器人與期望路徑距離為0.5 m,與速度方向夾角為π/6,即λ=[0.5 π/6]T。假設虛擬領航機器人速度為0.8 m/s,角速度為16 rad/s。即在某時刻,虛擬領航機器人中心線與期望軌跡連線長度為0.5 m,與期望軌跡該點切線方向夾角為π/6。跟隨機器人運動軌跡如圖12所示,其中,X、Y為機器人所處平面坐標,三角形為期望結構,端點為運動軌跡與虛擬機器人期望位置。
圖12 λ=[0.5 π/6]T跟隨機器人實驗運動軌跡
領航機器人以0.8 m/s速度運動時,跟隨機器人變化曲線如圖13虛線所示。當時間趨于50 s時,跟隨機器人速度穩定在0.8 m/s。
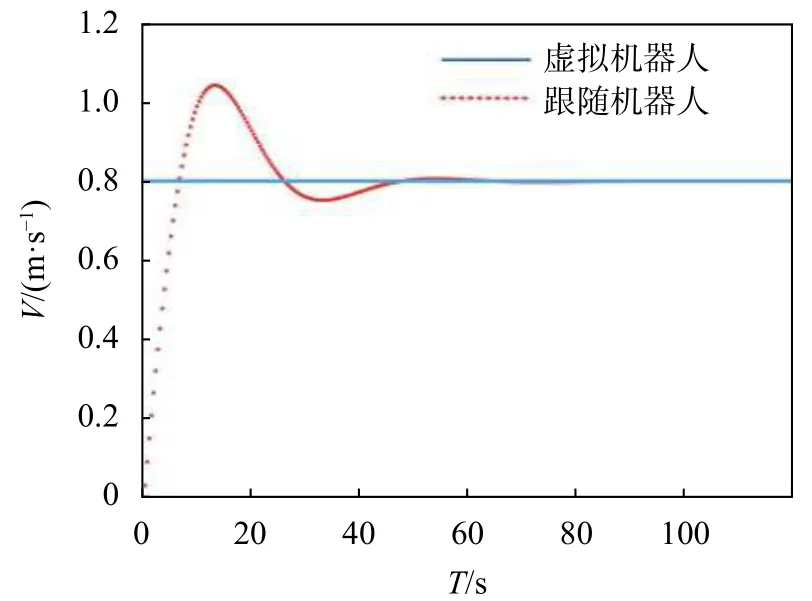
圖13 λ=[0.5 π/6]T跟隨機器人實驗速度曲線
通過對比表2及前文中速度曲線可以看出,跟隨機器人速度、位姿誤差在仿真中收斂較快。并且,跟隨期望軌跡比保持固定距離收斂耗時較少。
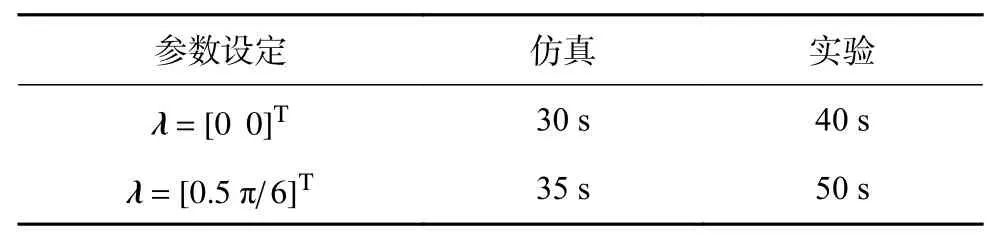
表2 仿真、實驗結果
在一定時間內,跟隨機器人運動速度逐漸收斂至預期,V0?V1在一定時間內趨于穩定。同時,跟隨機器人與虛擬領航機器人位姿誤差也趨近于穩定,系統達到穩定狀態。
4 結束語
本文以輪式差分驅動機器人為實驗對象,其由兩個獨立驅動的后輪控制,完成姿態變化。在此基礎上,通過對差分驅動機器人運動學模型分析,設計了控制器并生成相應控制算法。利用仿真和硬件實驗平臺,在兩種不同運動情況下,完成對控制算法的驗證。仿真和實驗結果表明:位姿誤差收斂及速度收斂均能滿足一般跟隨控制需求,驗證了控制算法與控制器的有效性與穩定性。
此外,本文提出的控制策略易于實現,只需合理設置 λ參數即可完成對機器人編隊控制狀態的調整,可為多種復雜場合下實際應用提供有益借鑒。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
