
基于光纖布拉格光柵的精細化多維力觸覺傳感器結構設計與仿真研究
2021-12-13 14:37:24曾佳欣熊鵬文龔思瑾
中國測試 2021年11期
曾佳欣,熊鵬文,,張 強,龔思瑾,黃 鑫
(1.南昌大學信息工程學院,江西 南昌 330031; 2.東南大學儀器科學與工程學院,江蘇 南京 210096)
0 引 言
微創手術是指將手術器具通過一個極小的切口運送到人體內切除病理組織的現代手術,例如胸腔穿刺引流手術便是在人體胸腔內積液過多時通過專業的穿刺引流針將積液抽取出來的精細化微創手術[1]。在實際操作時,微創手術尚有一些缺點使其在醫院里難以實施,如手術中使用的細長器械會降低醫生對接觸力的感知能力,并且實操中手術器械所受的力來自不同的方向,若不能準確感知手術中各方向的接觸力信息,就難以實現手術儀器的精準操作,此時我們需要用到多維力觸覺傳感器;多維力觸覺傳感器指一種能同時測量兩個方向以上力分量的傳感器,相對單維力傳感器可測得更加豐富的接觸力信息,通過多維力觸覺傳感器醫生能得到更精準的接觸力信息,更好判斷自身所施加力是否合適,手術的安全性也大大提升。
近年來,多維力觸覺傳感器和電子皮膚觸覺傳感器以其廣泛的用途和巨大的市場取得了極大的發展,有了很多的成果。宋愛國[2]概述了近50年來機器人觸覺傳感技術的發展情況,并對現有觸覺傳感技術進行了總結;邱瀾[3]等總結了機器人可延展柔性電子皮膚的研究進展;張津源[4]提出了基于三維多孔微結構復合導電材料的新型觸/壓覺傳感器;胡廣宇[5]提出了極端環境下多維力觸覺傳感器基于線性方法的容錯解耦方法及利用非線性BP神經網絡進行信號補償的容錯解耦算法;曹建國[6]等綜述總結了國內外近年來電子皮膚觸覺傳感器的研究進展與發展趨勢;汪浩鵬[7]提出了一種基于AgNWs、PDMS和壓阻橡膠的新型高柔彈性電子皮膚,可較為精準的測量接觸壓力;張庭[8]提出了一種基于觸覺傳感器信息反饋的動態抓取控制方法,提高了假手的觸覺感知及穩定抓取功能;徐菲[9]提出了一種基于新型力敏導電橡膠的柔性三維觸覺傳感器,實現了兼有柔韌性和三維力檢測功能的傳感器設計。
為推進精細化微創手術在醫學界的應用[10],使醫護人員在手術中能獲取更精準豐富的接觸力信息,本文設計了一種基于光纖布拉格光柵傳感的精細化多維力觸覺傳感器,推導其傳感原理,分析其構型設計,并進行受力模擬仿真驗證其傳感性能的優勢。
1 光纖布拉格光柵傳感器傳感原理
1.1 光纖光柵
光纖光柵的分類方法很多,根據光柵的折射率及其調制深度可分為光纖布拉格光柵、長周期光纖光柵、傾斜光纖光柵和啁啾光纖光柵等,本文選用光纖布拉格光柵。作為最早出現的光纖光柵之一,FBG具有體積小、質量輕、精度高、抗電磁干擾的優點,在許多領域都有廣泛應用,在醫學微創手術傳感領域也有著遠大的應用前景。
1.2 光纖布拉格光柵的傳感原理
FBG的纖芯折射率沿光纖軸向呈周期性變化,當光源發出的光進入光纖纖芯,到達FBG時,一定范圍內波長的光會被反射回來,另一部分光繼續透射過柵區前進。由光纖光柵的Bragg方程可得反射光的中心波長公式:

式中:λB——反射光中心波長值;
neff——光纖纖芯有效折射率;
Λ——光柵周期。
由式(1)可得,反射光中心波長值λB隨光纖纖芯折射率neff與光柵周期 Λ的變化而變化[11],而外界物理量參數如應力應變和溫度的變化會使neff和Λ發生改變,繼而導致反射中心波長產生偏移,通過光纖光柵解調器等設備測量出反射中心波長偏移量,即可推出應力應變或溫度的值,實現應力與溫度的傳感。
由于FBG具有的彈光效應,應力應變會導致光纖纖芯的折射率產生變化;且應力會使光纖產生形變,進而導致光柵的周期發生改變。在式(1)兩側對應力進行求導可得反射光的中心波長值變化公式:

其中,P和εX分別為FBG的有效彈光系數和其所受的應力應變。
溫度帶來的熱光效應會導致光纖纖芯折射率發生改變,且溫度產生的熱膨脹效應也會使FBG形變導致柵區周期的改變[12]。在式(1)兩側對溫度進行求導推出反射中心波長值與熱光系數和熱膨脹系數關系的公式:

熱光系數常用 ε表示,ε=dneff/neffdT是光纖纖芯折射率隨溫度的變化率;熱膨脹系數 α是溫度升高1 ℃時單位長度或單位體積物體長度或體積的變化量,記作α=dΛ/ΛdT。由此可得溫度對FBG的影響公式:

結合式(2)和式(4)即可得出應力應變和溫度的變化對FBG反射中心波長的影響公式:

2 光纖布拉格光柵傳感器結構設計
2.1 傳感器的整體結構設計
醫學微創手術中,力觸覺信息的獲取相當重要,掌握準確的力觸覺信息有助于醫生實現手術工具的精準操作;而要得到實時精準的接觸力反饋信息往往需要使用傳感器,借由在相關手術器械上安裝力觸覺傳感器,醫護人員能通過獲取的實時反饋力信息檢測人體病理組織,選擇最優的手術方案完成治療。
傳統的胸腔穿刺引流等精細化微創手術傳感器大都只能感知手術中產生的軸向力信息,而無法獲取扭矩力和徑向力反饋信息,且由于結構上的不足接觸力的反饋效果也時常不盡如人意。本研究針對微創手術中接觸力感知缺乏及無法獲取不同方向力觸覺信息的問題,設計了一種基于FBG的精細化多維力觸覺傳感器,該穿刺引流針傳感器能同時感知手術中所受的軸向力、扭矩力和徑向力,經后續進行的傳統結構和新型結構傳感器受力模擬仿真結果對比,證明該多維力觸覺傳感器對各個力應變的檢測效果皆有所提升。
本文在常用穿刺引流針的基礎上參考手術實際需求,經過力學結構分析使用SOLIDWORKS軟件設計了傳感器的結構,如圖1所示為軟件繪制的光纖布拉格光柵傳感器3D構型圖,圖1(a)為穿刺引流針的整體構型圖,圖1(b)為其外部引流套管,圖1(c)為內部穿刺針,其針柱上制有凹槽結構(d)部分[13],在(e)部分的針尖頂部制有一個槽,槽中放有兩個空心管道,另外在(f)部分將穿刺針針尖設計為空心結構,并且拆分為上下兩部分,其內部放有空心圓管,管道的4個盡頭略微凸出針尖壁0.1 mm。
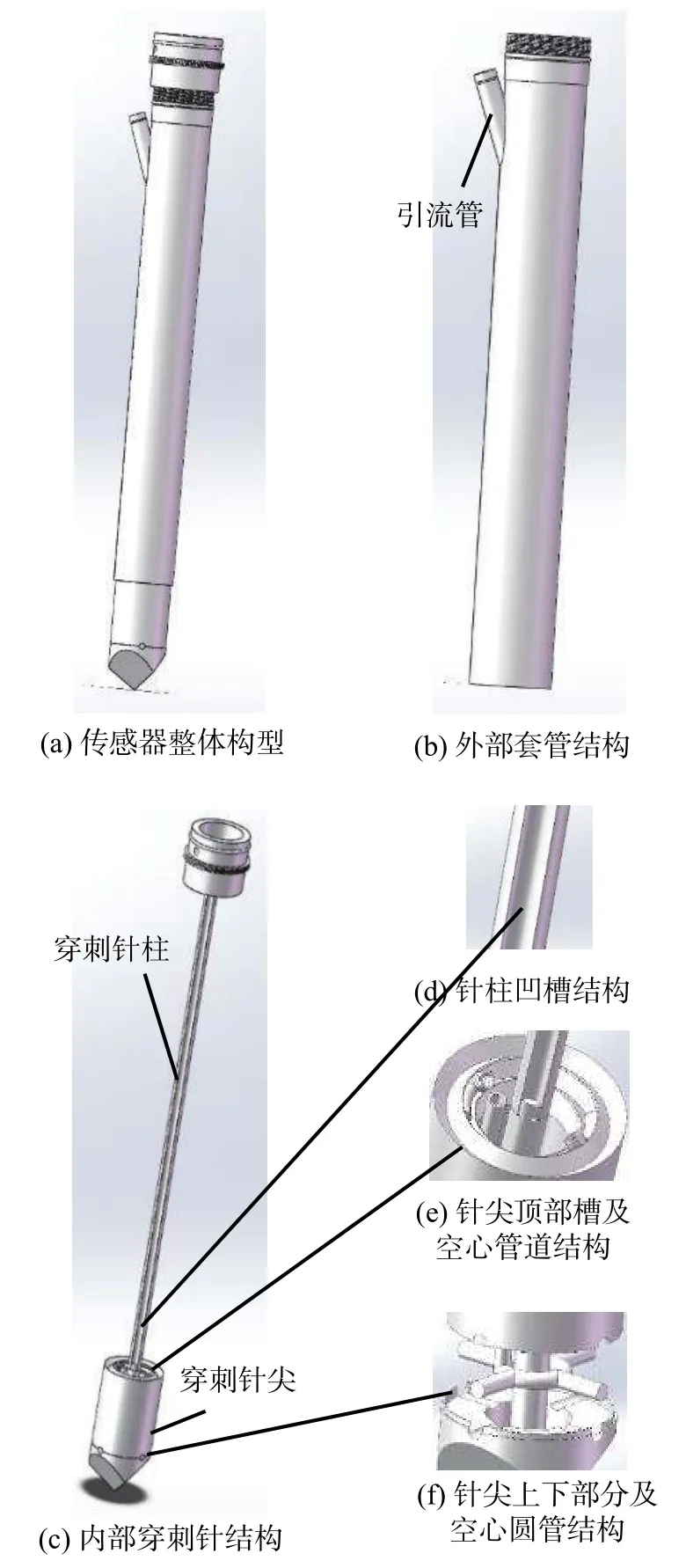
圖1 光纖布拉格光柵傳感器構型圖
要使穿刺針傳感器能檢測到手術穿刺過程中的力觸覺信息,需在其相應部位上粘貼FBG作為傳感元件感受其所受的應力應變。本研究選取幾個光纖布拉格光柵分別作為軸向力傳感元件、扭矩力傳感元件和徑向力傳感元件,其中將軸向力傳感元件FBG編號為FBG1,再選取2個扭矩力傳感元件FBG并分別編號為FBG6、FBG7,徑向力傳感元件選用寫入4種不同周期光柵的分叉光纖,將它們分別編號為FBG2、FBG3、FBG4和FBG5。如圖2所示為微創手術中光纖布拉格光柵傳感器的受力分析圖,手術時穿刺針穿刺進入人體胸腔,與人體組織發生相互作用,穿刺針柱會受到一個軸向力Fa并產生形變,將軸向力傳感元件FBG1粘貼在穿刺針柱凹槽內即可實現軸向力應力應變的檢測[11];穿刺過程中針尖頂部槽內會受到一個扭矩力M的影響,槽中的空心管道受力發生形變,產生應力,將扭矩力傳感元件FBG6、FBG7分別粘貼在兩個空心管道的內壁上感受應力的影響,進行扭矩力應變的檢測;穿刺時徑向力Fr會在凸出針尖壁的4個空心管道盡頭面上產生,使空心圓管產生形變,將徑向力傳感元件分叉光纖放入空心管道內并分別粘貼4個FBG在空心管道盡頭面內壁上,可完成徑向力應變的測量。
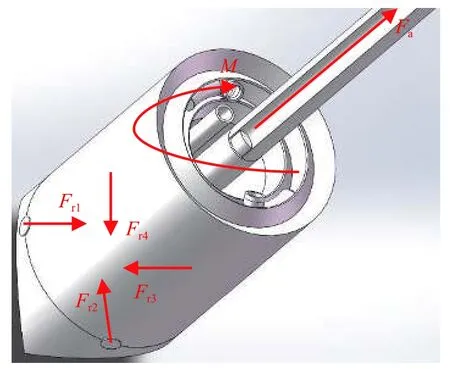
圖2 光纖布拉格光柵傳感器受力分析圖
如圖3所示為各光纖布拉格光柵的粘貼結構示意圖,本研究將軸向力傳感元件FBG1粘貼在針柱凹槽內檢測軸向力的應力應變,扭矩力傳感元件FBG6、FBG7各自集成在針尖頂部槽內的兩個空心管道內壁上感應扭矩力應力應變,徑向力傳感元件分叉光纖放入針尖內空心圓管并將其4個FBG分別一端粘貼在對應管道盡頭面上,另一端粘貼在管道內壁上,完成徑向力應力應變的檢測。
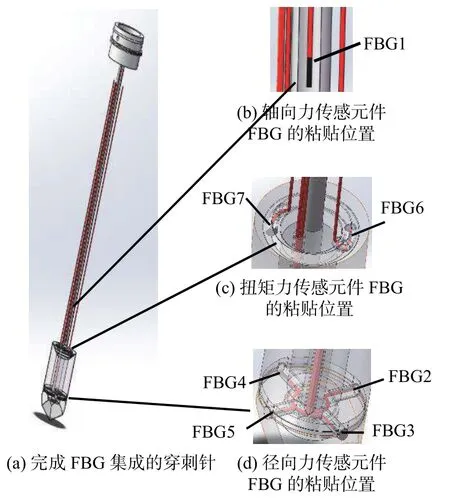
圖3 FBG粘貼結構示意圖
2.2 光纖布拉格光柵傳感器的構型分析
本研究在現實中通用的穿刺針結構基礎上,結合手術實際需求設計了能夠檢測多維力的新型結構穿刺針傳感器,其改進之處主要體現在軸向力應變、扭矩力應變和徑向力應變的相關檢測結構上。
在軸向力應變的檢測上,本設計在穿刺針柱表面制有一個凹槽。考慮實際手術中穿刺針需要刺入人體胸膜腔抽取積液,針的尺寸需要足夠微小,這里設計穿刺針柱的半徑為2 mm,針尖半徑為10 mm,針柱凹槽的制作方法為以原先的圓柱體針柱底面離圓心一定距離的一點為圓心繪制一個一定半徑的圓,再用該圓拉伸切除過整個針柱。本研究對凹槽的尺寸設計進行了對比分析,在切除圓與針柱底面圓圓心距為2.5 mm的情況下,制作了多個切除圓半徑不同的穿刺針模型并分別進行了軸向力受力仿真,如表1所示為穿刺針不同凹槽尺寸受力模擬分析結果,隨著圓半徑的減小,產生的應力強度也越來越小,由此可得切除圓的半徑應設為1.4 mm,可得到最佳的軸向力檢測效果。凹槽的設計能提升穿刺針結構對軸向力的敏感度,增加傳感器測量軸向力的精度,同時凹槽結構也使FBG的集成較原先更為便利。
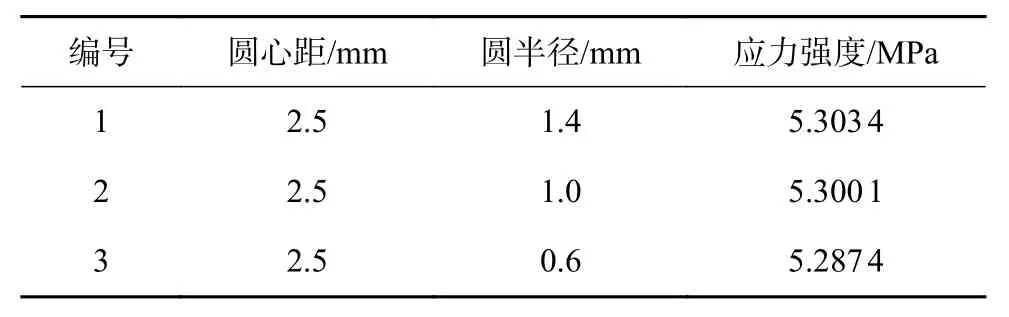
表1 穿刺針不同凹槽尺寸受力模擬分析結果
在扭矩力應變的檢測中,本設計在穿刺針尖頂部制作有一個槽,槽中放有兩個空心管道。在傳統設計中,為檢測穿刺針所受的扭矩力通常會在其針柱上安放一個輪輻式彈性梁結構,然而該結構仍會受到軸向力影響扭矩力的測量精度,本文直接在穿刺針尖的頂部制作一個寬度為2 mm的槽,槽內放入兩個內徑為1.5 mm、外徑為2 mm的空心管道,再在空心管道內集成光纖布拉格光柵,實現扭矩力的檢測。該設計能增強扭矩力的應力應變強度,提升檢測扭矩力的靈敏度。
在徑向力應變的檢測中,本研究將穿刺針尖設計為空心結構,并且拆分為上下兩部分以方便在其內部放入空心管道,管道的4個盡頭略微凸出針尖壁0.1 mm。后續對設計的穿刺針進行了徑向力的受力模擬分析,在凸出的管道盡頭面上施加了徑向力載荷,仿真結果顯示空心管道最大應力強度較大,應力敏感區域較廣,可得到良好的徑向力應變檢測效果。
2.3 光纖布拉格光柵傳感器的受力仿真
本研究在傳統穿刺針的基礎上提出了一種適用于胸腔穿刺引流等精細化微創手術的光纖布拉格光柵多維力觸覺傳感器結構設想,能夠同時感知手術過程的軸向力、扭矩力和徑向力。為了驗證改進的傳感器結構是否合理可行,相對傳統的穿刺針是否具有更佳的傳感性能,本文分別將傳統穿刺針傳感器結構和設計的新型穿刺針傳感器結構導入有限元分析軟件ANSYS進行受力模擬分析,對比分析二者在受到同等大小的軸向力、扭矩力或徑向力時,新型構型傳感器的形變量是否較大,產生的最大應力應變強度及應力敏感區域是否有所提升,進而得出新型傳感器傳感性能是否更佳[11]。
2.3.1 有限元分析操作步驟
有限元分析分為靜力學分析、模態分析、熱分析等多個種類,此處我們需要用到靜力學分析。首先打開 ANSYS Workbench 軟件,在 Toolbox(工具箱)窗口選擇 Analysis Systems(分析系統)中的Static Structural,即靜力學分析模塊;其次雙擊打開Static Structural模塊的 Engineering Data 單元格設置組成結構體的材料屬性,這里我們使用軟件初始默認的 Structural Steel結構鋼材料;再次設置Geometry單元格將SOLIDWORKS繪制的穿刺針模型導入進來;最后雙擊Model單元格進入ANSYS Mechanical分析程序,對模型進行網格劃分,這里本研究直接采用軟件自主劃分網格,并且分別施加載荷和約束,求解受力模擬仿真結果。
2.3.2 模型的建立
在ANSYS有限元分析中,模型可在Workbench軟件中自行創建,也可從其他建模軟件中直接導入[14],本文使用SOLIDWORKS軟件繪制出穿刺針模型,并導入Workbench中進行受力仿真。如圖4所示為導入DesignModeler的穿刺針模型,針尖的半徑為10 mm,針柱的半徑為2 mm,針尖內部和頂部空心管道的內徑為1.5 mm,外徑為2 mm。模型導入后進行網格劃分,劃分的單元類型為Solid186,單元數目為27 316個,節點數目為54 225個,在穿刺針的底座面上施加有一個固定約束。本研究計劃對穿刺針傳感器模型分別進行軸向力、徑向力和扭矩力的受力模擬仿真,通過對比新型結構穿刺針與傳統結構穿刺針的仿真結果數據來驗證改進的傳感器傳感性能是否更佳。
圖4 SOLIDWORKS導入 DesignModeler的穿刺針模型圖
2.3.3 結構靜力學分析
在軸向力應變的檢測中,本設計在穿刺針柱表面挖有凹槽。分別對傳統構型的穿刺針柱和新型的穿刺針柱施加相同的軸向力載荷,其中新型穿刺針的載荷施加面為其針尖內空心管道的4個盡頭面,傳統結構穿刺針的載荷施加面為其針尖壁上與新型穿刺針空心圓管盡頭面面積相等的4個圓形區域,對各自4個面分別施加4個3 N的與針柱平行方向的軸向力,合計為12 N,進行受力模擬仿真求解,如圖5所示為解得的二者位移云圖),在各自受到12 N大小軸向力載荷時,新型穿刺針的最大形變量為0.011 857 mm,傳統穿刺針的最大形變量為0.000 956 61 mm,在針尖處穿刺針的形變量最大,距離針尖越遠,模型形變量越小。由此可得,穿刺針柱的凹槽結構能夠提升應力應變強度,提高軸向力檢測的靈敏度,并且將軸向力傳感元件FBG1集成在穿刺針柱凹槽內接近針尖部位可使其感受到最大的軸向力應力應變強度。
圖5 傳統結構與新型結構穿刺針柱施加軸向力載荷仿真位移云圖(單位:mm)
在徑向力應變的檢測中,本研究將穿刺針尖設計為空心結構并在其內部放入空心管道,管道的4個盡頭凸出針尖壁0.1 mm。分別對傳統構型穿刺針尖和新型穿刺針尖施加同等大小的徑向力載荷,其中新型穿刺針載荷施加面為空心管道的4個盡頭面,傳統構型穿刺針載荷施加面為其針尖壁上與新型穿刺針空心管道盡頭面等大的4個圓形區域,分別施加4個3 N的垂直于各自4個面的徑向力,進行受力模擬分析求解,如圖6所示為解得的二者壓力云圖,當施加相同徑向力載荷時,新型穿刺針的空心管道產生的最大應力強度為3.855 7 MPa,相對傳統穿刺針尖壁的1.212 1 MPa更高,應力敏感區域也更為廣闊,且在空心管道4個盡頭面上產生的應力應變最大。由此可得,改進后穿刺針的結構設計能提升其應力強度,增大其應力敏感區域,并且將徑向力傳感元件分叉光纖的4個FBG各自粘貼在針尖空心管道4個盡頭面內壁上可得到最佳的穿刺針徑向力應力應變檢測效果。
圖6 傳統結構與新型結構穿刺針尖施加徑向力載荷仿真壓力云圖(單位:MPa)
在扭矩力應變的檢測中,本設計在穿刺針尖頂部制作有一個槽,槽內放有兩個空心管道。分別對傳統構型和新型的穿刺針施加5 N·mm的扭矩力載荷,其中傳統構型穿刺針的扭矩載荷施加處為其針柱上所固定彈性梁的外輪轂,新型穿刺針的扭矩載荷施加處為其針尖頂部槽面,進行受力分析求解,如圖7所示為解得的二者各自的位移云圖,在分別受到5 N·mm大小扭矩力載荷的情況下,新型結構穿刺針的最大形變量為0.004 807 mm,大于傳統穿刺針的 0.004 439 7 mm。由此可得,穿刺針尖頂部的槽及空心圓管結構能夠提升扭矩力應變強度,增加扭矩力檢測的精度,增強傳感器檢測扭矩力的傳感性能。
圖7 傳統結構與新型結構穿刺針施加扭矩力載荷仿真位移云圖(單位:mm)
如表2所示為傳統結構和新型結構穿刺針施加各種載荷的最大形變量與最大應力強度,在受到的載荷相同時,新型結構穿刺針的最大形變量與最大應力強度均比傳統構型穿刺針大。由此可得改進后的新型穿刺引流針傳感器相對傳統結構軸向力、徑向力和扭矩力的檢測靈敏度皆有所提升,具有較優良的傳感性能。
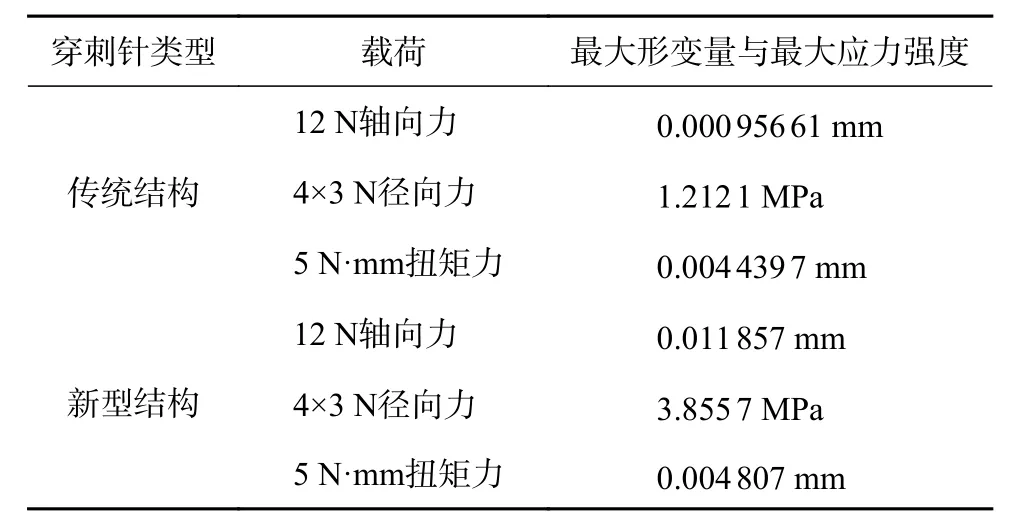
表2 傳統結構和新型結構穿刺針的靜力學分析結果
3 結束語
本文針對胸腔穿刺引流等精細化微創手術中接觸力反饋不佳及無法感知不同方向力觸覺信息問題,設計了一種基于光纖布拉格光柵的精細化多維力觸覺傳感器,該穿刺引流針傳感器能同時感知到穿刺過程中所受的軸向力、扭矩力及徑向力。同時,對FBG的傳感原理及觸覺傳感器的構型設計進行了介紹和分析,并采用有限元分析軟件ANSYS對傳感器結構進行各個力的受力模擬仿真,仿真結果顯示改進后新型的傳感器相比傳統構型最大應力強度與應力敏感區域皆有所增大,能夠更精準的檢測手術穿刺過程中的軸向力、扭矩力和徑向力,實現三維空間中各方向力的感知。
