
工業機器人靜態柔順性測量輔助加載裝置研制
2021-12-13 14:37:28唐迅捷張雪梅
中國測試 2021年11期
李 新,陳 力,茅 晨,唐迅捷,馬 濤,張雪梅
(1.江蘇省計量科學研究院,江蘇 南京 210023; 2.南京郵電大學自動化學院、人工智能學院,江蘇 南京 210023)
0 引 言
根據GB/T 12642—2013《工業機器人 性能規范及其試驗方法》,工業機器人檢測一共需要測試工業機器人的14項參數,其中的靜態柔順性是工業機器人整機性能試驗中非常重要的一項。工業機器人靜態柔順性是指在單位負載作用下測量工業機器人末端的最大位移,本質上是表征了工業機器人的靜態剛度性能。在工業機器人越來越多地要進行精細化操作、高精度作業的今天,這一性能的好壞尤為重要。
根據國標規定,工業機器人進行靜態柔順性測量時,輔助加載的作用力應施加在平行于機座坐標軸的三軸六個方向上,每次測量一個方向,加載力應以10%額定負載逐步增加到100%額定負載,在該方向上測量相應的位移[1]。然而,在實際的測試過程中,工業機器人的靜態柔順性測試存在難以實施的問題[2]。問題的關鍵是缺乏合適的力加載裝置。這一問題導致該項參數在測試過程中一般都被放棄測量的現狀,造成工業機器人的該項性能并不能正確反映出來。
為了解決這一問題,很多研究者已經給出了一些解決方案。徐晗等[3]提出了一種負載供給裝置,其功能就是給工業機器人末端施加作用力,使其拉力值與測試所需的負載大小一致。吳建紅等[4]提出了一種機器人柔順性測試裝置,該發明只是設計了一個利用滑輪進行拉力轉向的機械裝置,作用力的加載是需要手動加載,不具備自動加載的能力。劉毅等[5]提出一種導向機構來實現力的加載,其具有一個立方框架結構,內含多套滑輪組來調節拉繩的方向。李峰等[6]提出了一種也是使用砝碼進行力加載的十字形結構的工裝。李小兵等[7]提出了應用于工業機器人的靜態柔順性能測試裝置,其中作用力的加載裝置是由加載方向調節組件和加載力調節組件組成,在位移測量上是使用激光跟蹤儀進行測量。朱敏杰[8]在基于激光跟蹤儀的工業機器人性能測試研究中進行了三個方向的靜態柔順性測試,也是使用滑輪機構和砝碼進行作用力的施加。對上述各種方案進行分析后,可以發現都是在被測工業機器人外圍采用滑輪機構和拉繩來進行作用力的施加,這里存在兩點不足:1)裝置普遍體積較大,操作不便;2)在變換測試方向時,需要重新安裝或重新調整,測試效率很低。
綜上所述,目前還沒有一種體積小巧、操作高效的輔助加載裝置用于工業機器人靜態柔順性的測量。為解決這一問題,本文研制了一種新型的基于三維力傳感器的工業機器人靜態柔順性輔助加載裝置,可以滿足靜態柔順性測量的需求。
1 工作原理及組成
根據國標中對于靜態柔順性測量的要求,該測量基本上可以描述為:在工業機器人末端的平行于機座坐標系的6個方向上分別施加額定負載范圍內的作用力,如圖1所示,在施加作用力的同時測量工業機器人末端的空間位移。
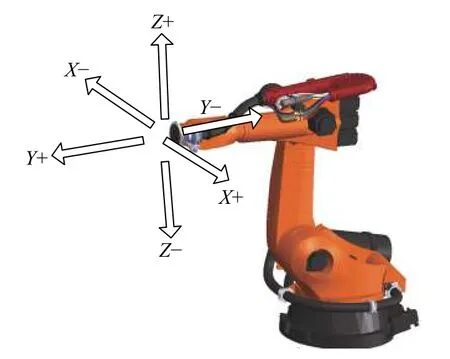
圖1 工業機器人靜態柔順性測量加載方向示意圖
要解決這個測量問題,可以分為兩個步驟:第1步,在工業機器人的末端施加符合要求的標準作用力;第2步,測量工業機器人末端的空間位移。其中,第2步是利用常規測量儀器就可以實現的,例如利用激光跟蹤儀就可以輕松實現對空間位移量進行精準的測量[9]。用激光跟蹤儀實現工業機器人靜態柔順性測量的原理如圖2所示。
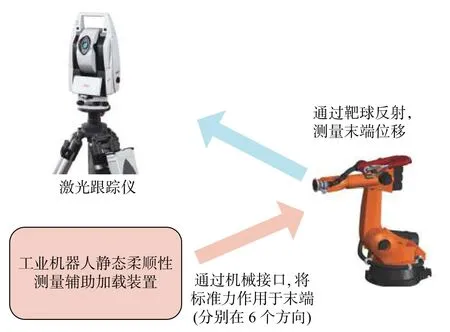
圖2 工業機器人靜態柔順性測量原理圖
因此,當前的關鍵問題就是研制一臺可以給工業機器人末端在平行于機座坐標系的6個方向上分別施加標準作用力的輔助加載裝置。按照這個思路,本文創新地提出使用推力作為作用力的解決方案,該方案是一種基于三維力傳感器的作用力加載裝置。其工作原理為:在工業機器人末端安裝一個球籠機構,再由一個三維電控滑臺控制一個球桿,該球桿的工作部分(即:球頭)在球籠的內部與球籠的內壁接觸,這樣就可以對工業機器人末端以“推力”的方式施加不同方向的作用力,而這個球桿的作用力又通過移動平臺上的三維力傳感器反饋給控制系統,從而保證了施加作用力的大小準確可靠。
該裝置的具體結構由機械接口、傳感器組件、三軸電控滑臺機構和電控系統四部分組成。機械結構包括連接被測工業機器人末端的球籠和安裝在加載裝置上的球桿;傳感器組件包括連接固定的三維力傳感器和傳感器底座;傳感器底座連接三軸電控滑臺機構;電控系統控制整個系統按照軟件設定工作。裝置結構示意圖如圖3所示。
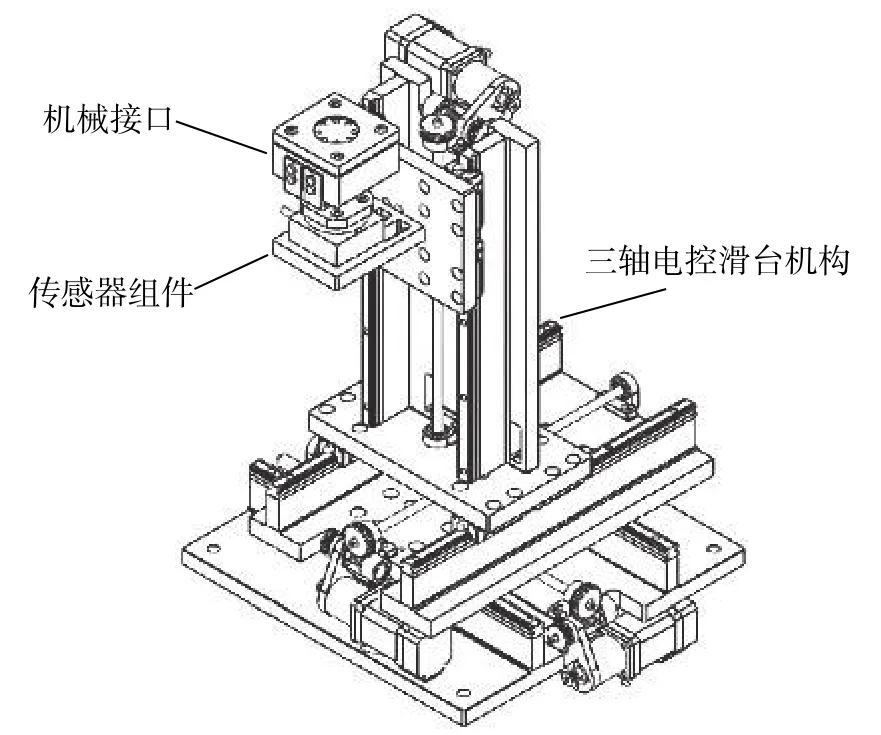
圖3 工業機器人靜態柔順性輔助加載裝置的結構示意圖
該裝置的工作狀態示意圖如圖4所示。再將激光跟蹤儀的反射靶球固定在工業機器人的末端,就可以實現工業機器人靜態柔順性的測量。
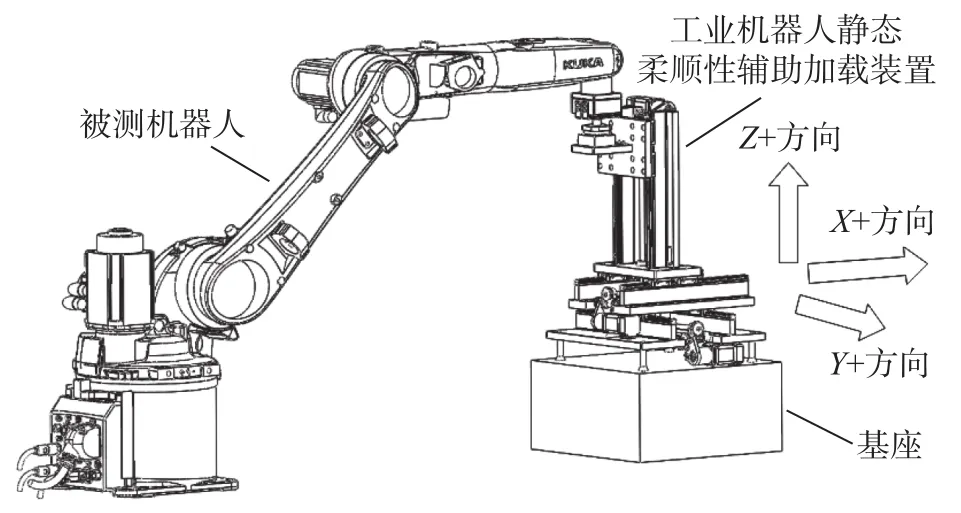
圖4 工業機器人靜態柔順性輔助加載裝置工作狀態示意圖
2 關鍵技術
2.1 三維力傳感器的選擇
如果采用單維力傳感器分布在滑臺機構不同的軸上,那么會因為分布位置的不同引入力矩的影響,導致測量力值不準確[10]。而三維力傳感器可以在作用點不變的情況下測量三維的作用力,即測量6個方向的作用力,這樣就可以避免上述問題的產生。輔助加載裝置的設計只是用到了三維力傳感器的單向測量精度,使用時只需要測量單軸的力值,并不需要測量維間耦合輸出的其他軸的力值,所以在選擇傳感器時,只需要考察其單軸的精度即可。
本文選定的檢測對象是額定負載為20 kg的工業機器人,所以研制的輔助加載裝置的技術要求如下,量程范圍應為:0~200 N,作用力的最大示值誤差應為:≤±1%,也就是≤2 N。為了確保所施加作用力的準確性,根據計量學中“校準儀器的準確度要達到被校對象的準確度的1/3~1/10”的原則,對裝置中所使用的三維力傳感器的技術要求便可確定為:直線度絕對值:≤±0.3%(力值傳感器的測量準確度使用直線度表示)[11]。在裝置研制的過程中,需要對所選擇三維力傳感器進行校準,以判斷其是否符合技術要求。校準實驗使用測量范圍為:10 N~1 kN、精度等級為:0.01級的全自動靜重式力標準機對定制的三維力傳感器進行校準。實驗現場如圖5所示。

圖5 三維力傳感器校準實驗現場
根據校準實驗得到的傳感器不同方向上的數據計算三維力傳感器各個方向上的直線度,實驗結果如表1所示。
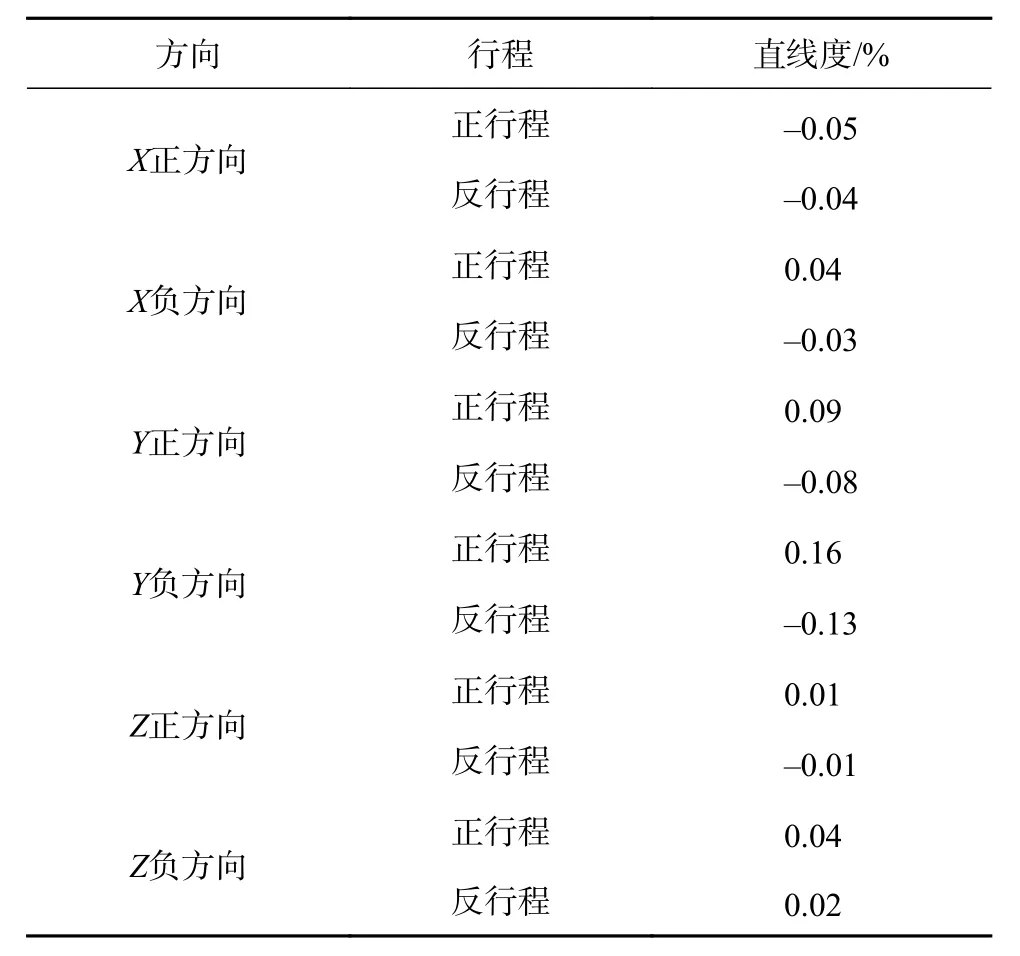
表1 三維力傳感器校準實驗結果
根據實驗結果,各方向正負行程中直線度絕對值最大為0.16%,優于設計要求的±0.3%,因此,該三維力傳感器可以應用于所設計的工業機器人靜態柔順性測量輔助加載裝置。
2.2 機械接口的設計
在國標中,靜態柔順性測量要求作用力應施加在平行于機座坐標軸方向上,且要有正負兩個方向,這種要求對作用力接觸的機械結構提出了較高的要求,所以加載裝置與工業機器人的機械接口的設計也成為了一個關鍵問題。
本文提出了一個球籠結構的機械接口,包括接觸球罩、接觸球罩過渡件、兩個拉力卡板、接觸球桿和接觸球桿過渡件5個部分,如圖6所示。接觸球罩過渡件的作用是保證工業機器人末端和接觸球罩可以緊固連接。同樣,接觸球桿過渡件的作用是保證接觸球桿和三維力傳感器可以緊固連接。接觸球罩和兩個拉力卡板合圍成了一個類似球籠的結構,將接觸球桿的球頭包裹在里面。在不拆除拉力卡板的情況下,球頭無法脫離。接觸球罩的內腔包括內腔半球面和內腔圓柱面結構,這種設計可以確保施加作用力的方向正確,如圖7所示。
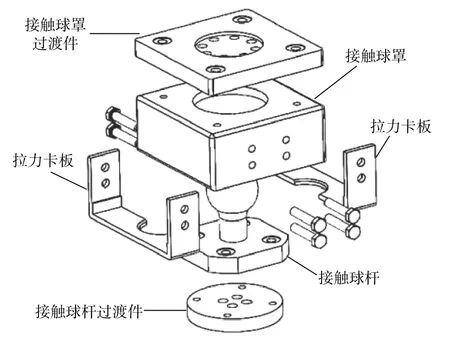
圖6 機械接口爆炸圖
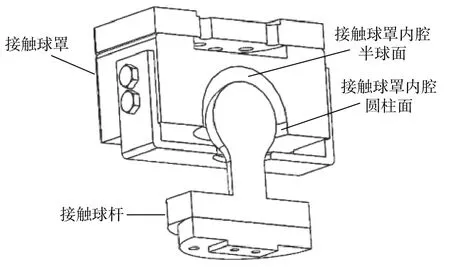
圖7 機械接口剖面圖
該機械接口在初始狀態下是非接觸的,作用力為零。在給被測工業機器人施加水平4個方向的作用力時,接觸球桿的球頭與接觸球罩內腔圓柱面分別在X+、X–、Y+、Y–4個方向上接觸,這樣便可以完成對被測工業機器人在4個方向上施加作用力。在給被測工業機器人施加數值向上的作用力時,接觸球桿與接觸球罩內腔半球面在Z+方向上接觸,這樣便可以完成對被測工業機器人施加向上頂的作用力。當需要施加Z–方向作用力時,接觸球桿向Z–方向移動,球桿的球頭下部會壓在兩個拉力卡板上,這樣便對被測工業機器人施加了Z–方向的作用力。以此實現對被測工業機器人末端6個方向的作用力的施加。另外,這種設計可以在測量時快速轉換測量方向,不需要再對整個測量裝置進行重新設置,極大地提高了測量效率。
2.3 減速機構的設計
針對工業機器人靜態柔順性測量的特點,本文設計了一套減速機構,可以有效實現裝置的傳動。該減速機構是一套三級減速機構,將電機的轉動減速之后傳遞給傳動絲杠,從而帶動各軸滑臺移動。三級減速分別為:一級齒輪減速機;二級同步帶減速機;三級蝸輪蝸桿減速機。減速機構設計圖如圖8所示。壓緊彈簧和轉動軸的作用是確保三級蝸輪蝸桿減速機的蝸桿始終壓緊在蝸輪上,從而可以有效地避免齒間間隙造成的傳遞誤差,保證了作用力的平穩傳遞。

圖8 減速機構示意圖
2.4 控制邏輯的設計
根據國標中的要求,“力應以10%額定負載逐步增加到100%額定負載”,所以工業機器人靜態柔順性測量輔助加載裝置需要能夠在輸出范圍內對輸出的標準力進行設置,并自動進行力的加載。本文采用的控制原理是經典的反饋控制,如圖9所示。在工作的初始狀態,接觸球桿不與球籠結構接觸,作用力為0 N。工作狀態下,在某一方向設定好需要施加的作用力,電控系統的控制器會控制相應的電機轉動,電機的轉動經過減速傳動機構控制滑臺移動,這樣接觸球桿便會在相應方向上與球籠機構接觸,產生作用力,該作用力的大小可以由三維力傳感器反饋給電控系統進行控制。當傳感器反饋的作用力值小于設定力值時,電控系統繼續控制滑臺移動,作用力則會繼續增大;當傳感器反饋的作用力值與設定的力值相等時,電控系統控制滑臺停止移動,作用力會保持;當傳感器反饋的作用力值大于設定力值時,電控系統會反向控制電機運動,不斷減小作用力,直至作用力值與設定力值相等。
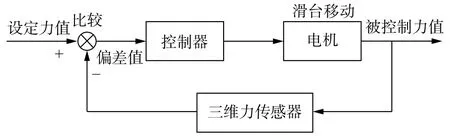
圖9 輔助加載裝置的反饋控制方框圖
3 裝置的標定和應用
3.1 裝置的標定
根據上述工作原理和關鍵技術,將本文設計的工業機器人靜態柔順性測量輔助加載裝置實現,如圖10所示,由運動工作主體和電控箱兩部分組成。

圖10 工業機器人靜態柔順性測量輔助加載裝置
裝置完成后,需要對裝置整體進行標定,以確保裝置輸出作用力的準確。因此,設計并制作了一臺標定架,通過標準增砣砝碼來對裝置的6個方向進行標定[12]。標定架定的滑輪機構為可調節的機構,這樣就可以避免在標定方向上的幾何誤差。利用標尺和角度尺來調節定滑輪位置,從而調整了拉繩的方向,確保砝碼施加的拉力方向與裝置的XYZ軸方向一致。標定現場如圖11所示。

圖11 裝置標定現場
標定完成后,對所研制裝置的各個軸進行力的測量,測量結果如表2、表3、表4所示。
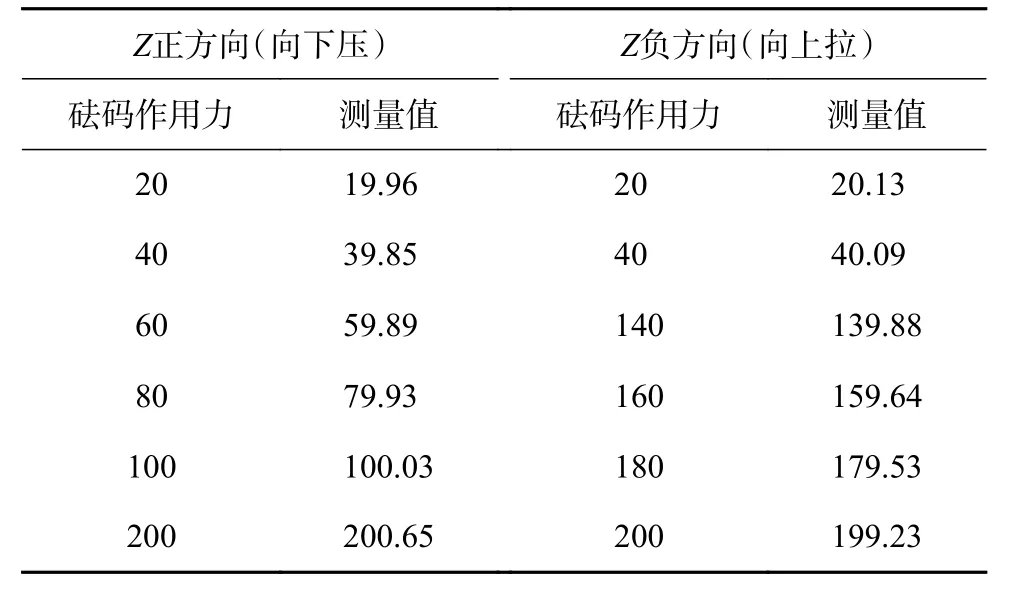
表2 Z方向測量值 N
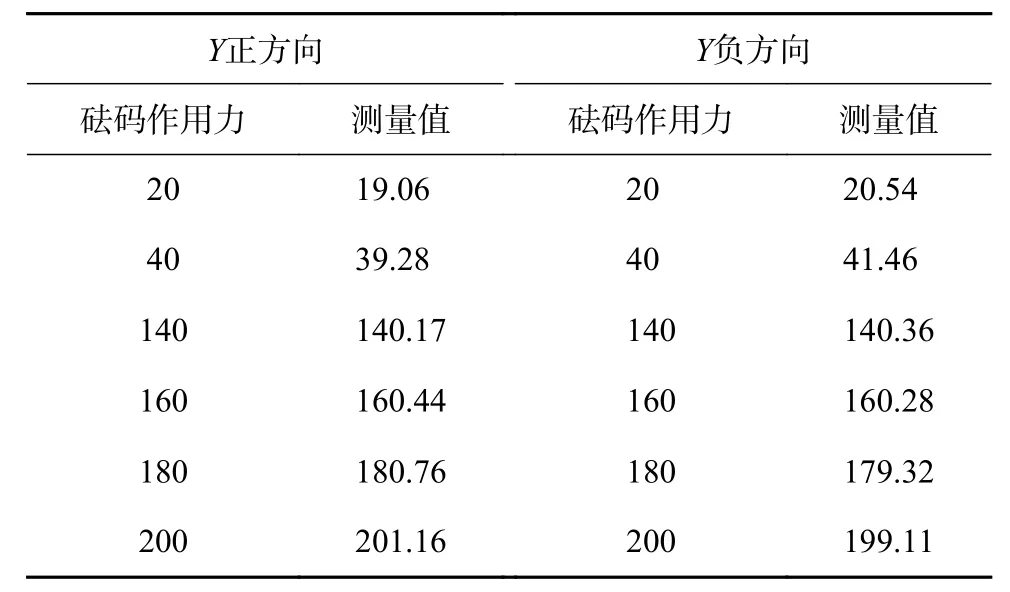
表3 Y方向測量值 N
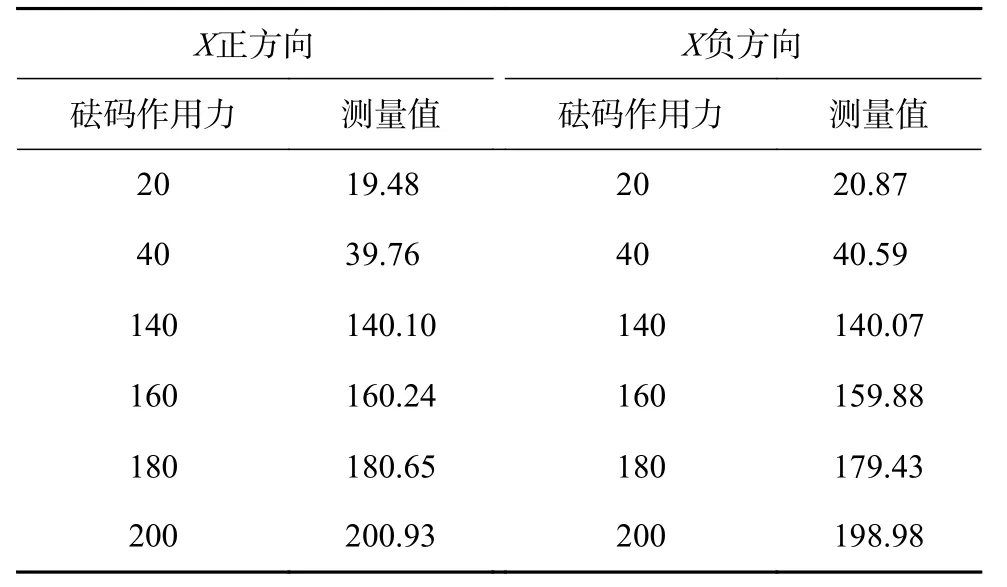
表4 X方向測量值 N
從測量結果可以計算得出,所研制的輔助加載裝置的最大示值誤差絕對值為:0.7%,該結果滿足設計時提出的優于±1%的要求。
3.2 裝置的應用
對于靜態柔順性較好的工業機器人,在末端施加標準的作用力后,末端位移量應該較小且應基本呈現線性變化。將本文研制的輔助加載裝置應用于庫卡KR10R1420型工業機器人的靜態柔順性測量。該機器人的額定負載為10 kg,約為98 N。根據國家標準,使用所研制的輔助加載裝置給該工業機器人末端的作用力從10 N逐步加載到98 N,由于該型號工業機器人靜態柔順性較好,所以當作用力逐步加載后,末端位移量的變化應表現為線性變化,即末端位移量數據點的直線度較小。利用激光跟蹤儀測量被測工業機器人末端的位移量[13],如圖12所示,工業機器人靜態柔順性測量結果如表5所示,數據為6個方向在不同大小作用力下的位移量。根據測量結果可以得到,在額定負載范圍內,6個方向施加作用力后,工業機器人末端的位移是線性變化,直線度分別為:X正方向2.90%;X負方向4.78%;Y正方向1.96%;Y負方向3.23%;Z正方向3.84%;Z負方向3.62%,直線度均在5%以下,與預期結果一致。
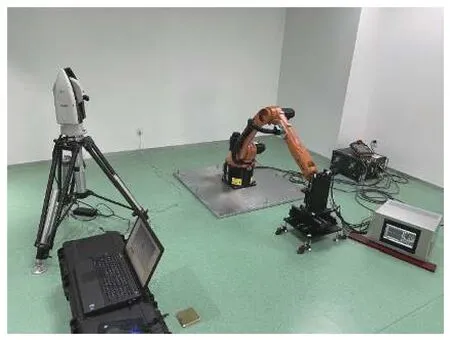
圖12 輔助加載裝置應用現場
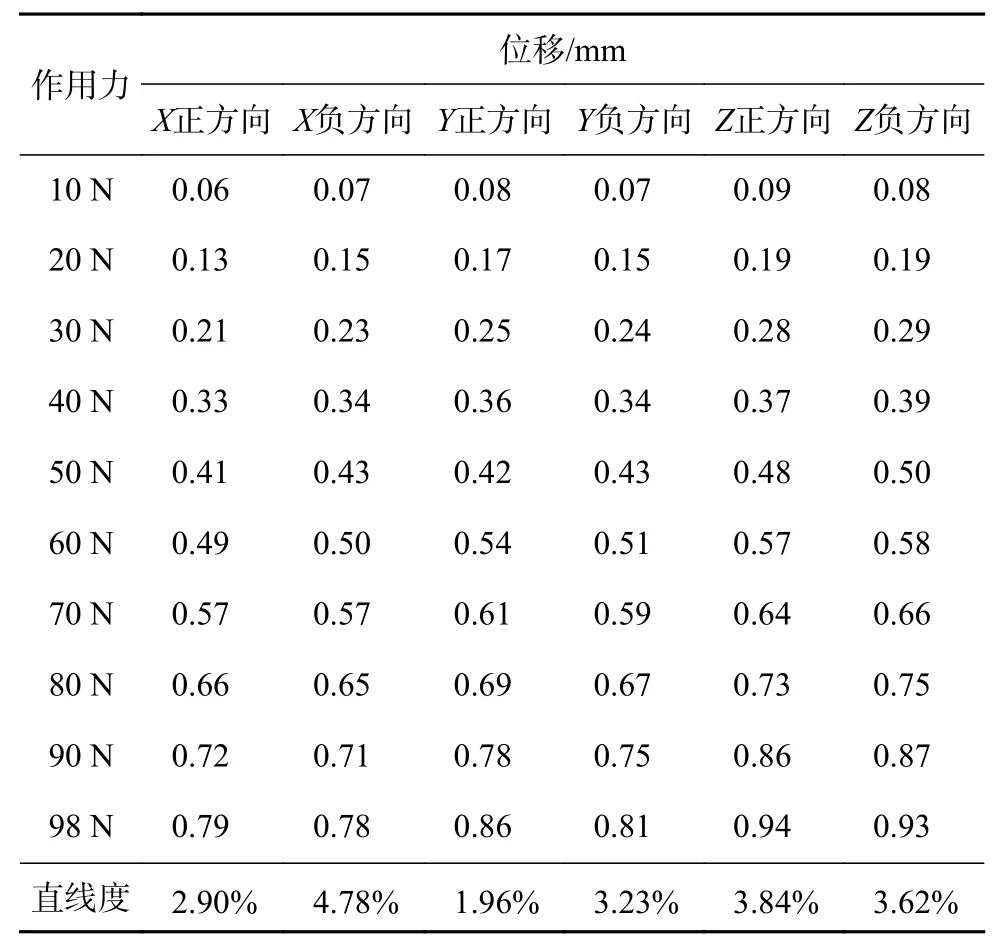
表5 工業機器人靜態柔順性測量結果
4 結束語
本文對工業機器人靜態柔順性難以測量的問題進行了分析,得出了目前的測量難點在于缺乏合適的輔助加載裝置。根據這一難點,本文提出了一種基于三維力傳感器的工業機器人靜態柔順性測量輔助加載裝置。該裝置與其他方案相比,具有體積小巧、工作效率高的特點,而基于三維力傳感器的反饋系統也確保了輸出作用力的準確性。通過標定實驗和應用試驗,既驗證了該輔助加載裝置示值誤差滿足設計的技術要求,同時也驗證了該加載裝置在測量工業機器人靜態柔順性時的有效性。本文對工業機器人靜態柔順性的測量方法研究具有一定的參考意義。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
