海底地殼形變監(jiān)測(cè)現(xiàn)狀與啟示
2021-12-13 13:09:12喬學(xué)軍王偉林牧陳威劉剛
地球物理學(xué)報(bào) 2021年12期
關(guān)鍵詞:研究
喬學(xué)軍, 王偉, 林牧, 陳威, 劉剛
中國(guó)地震局地震研究所,地震大地測(cè)量重點(diǎn)實(shí)驗(yàn)室, 武漢 430071
0 引言
地殼形變是板塊或斷層運(yùn)動(dòng)的直接反應(yīng),當(dāng)變形積累產(chǎn)生的應(yīng)變超出了巖石的承受能力,就會(huì)發(fā)生破裂從而引發(fā)地震,因此地殼形變監(jiān)測(cè)與研究一直是地震監(jiān)測(cè)、預(yù)測(cè)及孕震機(jī)理研究的重要手段之一(杜瑞林等,2016;周碩愚等,2017).多年來,地殼形變監(jiān)測(cè)技術(shù)不斷進(jìn)步,如以GNSS和InSAR為主的空間對(duì)地觀測(cè)技術(shù),在地震的震間、同震及震后形變研究中一直擔(dān)當(dāng)主力,并取得了較好的成果(王琪等,2020;王敏和沈正康,2020;江在森等,2020),但這些地殼形變監(jiān)測(cè)與研究工作絕大多數(shù)都集中在大陸地區(qū),由于海水對(duì)電磁波的傳播具有很強(qiáng)的吸收作用,適用于陸地的空間觀測(cè)技術(shù)無法在全球70%以上的海洋地區(qū)應(yīng)用,因此海底形變監(jiān)測(cè)與研究成果相對(duì)較少,但是因?yàn)榇箨懪c海洋板塊具有相互作用的地球動(dòng)力系統(tǒng)(Le Pichon et al., 1973;許志琴等,2021),如Coltice等(2019)將地球作為統(tǒng)一的動(dòng)力系統(tǒng)進(jìn)行三維模擬,結(jié)果表明2/3的地球表面運(yùn)動(dòng)速度快于地幔的運(yùn)動(dòng)速度,說明地球內(nèi)部的運(yùn)動(dòng)由地表拖曳控制,而地表其余1/3部分,地幔運(yùn)動(dòng)速率則超過了地表運(yùn)動(dòng),說明大陸被地幔運(yùn)動(dòng)拖曳、聚集而形成超級(jí)大陸,而超級(jí)大陸又被冷卻的海洋板片俯沖下沉撕裂,此過程即威爾遜旋回(Wilson, 1963).另一方面,海洋不但存在許多活躍的地質(zhì)構(gòu)造,如洋中脊、海溝、火山及板塊匯聚處的俯沖帶等,而且還存在頻繁的地震活動(dòng),如環(huán)太平洋地震帶是全球規(guī)模最大的地震活動(dòng)帶(Yang et al., 2019),地球上90%的地震及80%最強(qiáng)烈的地震都發(fā)生在該地帶上(Villaverde, 2009),所以開展海底地殼形變監(jiān)測(cè)與研究,對(duì)于理解一些重要俯沖帶的動(dòng)力學(xué)過程及其對(duì)大陸地震活動(dòng)的潛在影響,具有非常重要的研究?jī)r(jià)值.
針對(duì)海洋與陸地觀測(cè)環(huán)境及其介質(zhì)的不同,海底地殼形變監(jiān)測(cè)經(jīng)過多年發(fā)展,目前形成了以GNSS定位技術(shù)與聲吶測(cè)距(Acoustic Ranging)(以下簡(jiǎn)稱GNSS-A)為主的觀測(cè)系統(tǒng),該技術(shù)通過重復(fù)監(jiān)測(cè)海底測(cè)量標(biāo)志的站間距離、相對(duì)位置、水深及海水介質(zhì)參數(shù)(溫度、鹽度)等,獲取精確的海底地殼形變圖像.經(jīng)過30多年的發(fā)展,基于GNSS-A的海底形變監(jiān)測(cè)技術(shù)逐漸成熟,并得到了較好的應(yīng)用.本文在總結(jié)國(guó)內(nèi)外研究現(xiàn)狀的基礎(chǔ)上,結(jié)合我國(guó)的實(shí)際情況,提出了開展中國(guó)海底地殼形變監(jiān)測(cè)的建議.
1 GNSS-A系統(tǒng)組成及工作原理
GNSS-A系統(tǒng)主要使用了GNSS定位和聲吶測(cè)距技術(shù),其中,GNSS用來實(shí)現(xiàn)海面載體的精確定位,聲吶測(cè)距用來實(shí)現(xiàn)海底目標(biāo)的精確定位.最新的系統(tǒng)由以下4部分組成(圖1)(Fujita et al., 2006; Matsumoto et al., 2008;Ishikawa et al., 2020):
(a) 海底觀測(cè)站
海底觀測(cè)站的核心裝置是一套精密聲納“接收-轉(zhuǎn)發(fā)”裝置(a precision transponder,PXP),通常由一組呈正方形分布的4個(gè)PXP組成,正方形對(duì)角線的長(zhǎng)度大約等于該地區(qū)的水深,該組裝置(陣列)放置于海底,共同構(gòu)成一個(gè)海底觀測(cè)站,類似于陸地上的GNSS測(cè)站.PXP的作用是接收船載觀測(cè)系統(tǒng)調(diào)制的聲吶信號(hào)并將其回傳至船載觀測(cè)系統(tǒng).
(b) 船載觀測(cè)系統(tǒng)
由海洋觀測(cè)船、GNSS接收系統(tǒng)、姿態(tài)測(cè)量傳感器、換能器、投棄式溫深儀、溫鹽深儀等組成,具有GNSS實(shí)時(shí)定位、姿態(tài)確定、海底聲納發(fā)射、回波探測(cè)接收、聲波信號(hào)處理、數(shù)據(jù)存儲(chǔ)、海水參數(shù)觀測(cè)等一系列功能.
(c) 陸基GNSS參考站
采用差分定位或地基增強(qiáng)系統(tǒng),為船載觀測(cè)系統(tǒng)提供高精度的實(shí)時(shí)定位服務(wù),定位精度取決于海洋觀測(cè)船與陸基GNSS測(cè)站間的距離.
(d) 海底形變觀測(cè)數(shù)據(jù)處理系統(tǒng)

圖1 海底地殼形變監(jiān)測(cè)系統(tǒng)示意圖XBT:投棄式溫深儀, CTD:溫鹽深儀.Fig.1 Schematic of the seafloor crustal deformation monitoring systemXBT: Expendable Bathy Thermograph, CTD: Conductivity Temperature Depth.
對(duì)觀測(cè)數(shù)據(jù)進(jìn)行綜合處理,計(jì)算海底形變測(cè)站的精確坐標(biāo)及形變量,并聯(lián)合陸地GNSS觀測(cè)結(jié)果,獲取統(tǒng)一坐標(biāo)框架下的點(diǎn)位時(shí)間序列及海陸地殼形變速度場(chǎng)信息.
GNSS-A形變監(jiān)測(cè)的工作原理與過程如下:(1)在海底測(cè)站附近,船載測(cè)量系統(tǒng)通過換能器發(fā)射調(diào)制的M序列信號(hào),經(jīng)海底觀測(cè)站接收并反射至換能器,由此獲取聲納的往返時(shí)間,同時(shí)還使用XBT與CTD設(shè)備進(jìn)行海水傳播速度及溫度、深度、鹽度等參數(shù)的觀測(cè);(2)利用陸基GNSS參考站對(duì)船載觀測(cè)系統(tǒng)進(jìn)行GNSS動(dòng)態(tài)定位及姿態(tài)參數(shù)的確定,計(jì)算并獲取換能器的坐標(biāo);(3)基于換能器的連續(xù)位置和對(duì)應(yīng)的聲吶往返行程時(shí)間及海水聲速參數(shù)(如溫度、鹽度、壓強(qiáng)等),通過線性反演,分別估算每個(gè)PXP的位置,最終將它們的平均值作為海底測(cè)站的精確位置(Fujita et al., 2006).
為了精確計(jì)算PXP坐標(biāo),高精度的海水聲速剖面非常重要(Li et al., 2016),為此,在實(shí)際觀測(cè)中,需要在測(cè)前與測(cè)后進(jìn)行CTD觀測(cè),同時(shí)每小時(shí)也要進(jìn)行XBT觀測(cè).另一方面,記錄的聲波往返時(shí)間不僅包括距離信息,還包括沿路徑的聲速結(jié)構(gòu)信息,因此可通過對(duì)先驗(yàn)聲速結(jié)構(gòu)參數(shù)進(jìn)行改正來實(shí)現(xiàn),其中貝葉斯最小二乘反演方法可用來進(jìn)行以上計(jì)算.該方法首先基于某個(gè)先驗(yàn)聲速結(jié)構(gòu),通過迭代確定PXP的位置,然后根據(jù)結(jié)果的殘差,針對(duì)給定的時(shí)間窗口估算聲速結(jié)構(gòu)隨時(shí)間變化的系數(shù),其中時(shí)間窗口寬度從單個(gè)觀測(cè)時(shí)段中選取,最大為一天,通過不斷重復(fù),直到坐標(biāo)參數(shù)收斂.
2 國(guó)內(nèi)外研究現(xiàn)狀
在國(guó)外與海底地殼形變類似的名詞有Seafloor Geodesy,Marine Geodesy及Seafloor Crustal Deformation,而國(guó)內(nèi)類似的名詞有海洋大地測(cè)量和海洋大地控制測(cè)量等,其中在知網(wǎng)的關(guān)鍵詞搜素中,幾乎沒有海底地殼形變的結(jié)果.
早在1960年代中期,美國(guó)研究人員開始探索海底形變監(jiān)測(cè)技術(shù),并獲得了米級(jí)的精度(Spiess et al.,1966),但直到1985年,隨著GNSS的出現(xiàn),Spiess(1985)首次研發(fā)了GNSS-A技術(shù)并進(jìn)行了試驗(yàn).多年來Spiess與其他研究人員為提高GNSS-A觀測(cè)技術(shù),在胡安·德富卡板塊的海底開展了卓有成效的工作(Spiess and Hildebrand,1995;Spiess et al.,1998;Chadwell et al.,1998,2002),隨著觀測(cè)設(shè)備、觀測(cè)模式與數(shù)據(jù)處理技術(shù)的不斷改進(jìn),以前需要幾天觀測(cè)才能達(dá)到厘米級(jí)的定位精度(Gagnon et al.,2005;Fujita et al.,2006 ;Chadwell and Spiess 2008),而目前只要數(shù)個(gè)小時(shí)就可能實(shí)現(xiàn)厘米級(jí)甚至亞厘米級(jí)的精度(Honsho and Kido,2017).
GNSS-A觀測(cè)技術(shù)的發(fā)展主要經(jīng)歷了三個(gè)階段,1991年到2008年為第一階段,該階段的海底形變監(jiān)測(cè)主要以桅桿系統(tǒng)(Pole System)為主,觀測(cè)設(shè)備安裝在船尾一根可拆卸的不銹鋼桅桿上,GNSS天線和姿態(tài)傳感器安裝在桅桿頂部,換能器安裝在桅桿底部,在進(jìn)行海洋觀測(cè)時(shí),為了避免螺旋槳產(chǎn)生的噪音,只有當(dāng)船舶關(guān)閉發(fā)動(dòng)機(jī)處于漂流狀態(tài)才能進(jìn)行工作,這樣將無法控制船舶的航跡與軌道,難以確保觀測(cè)船與海底測(cè)站之間良好的觀測(cè)圖形強(qiáng)度,致使觀測(cè)時(shí)間較長(zhǎng),通常需要2~4天才能完成一個(gè)測(cè)點(diǎn),而觀測(cè)期間由于海水參數(shù)的不斷變化也會(huì)導(dǎo)致觀測(cè)精度的降低.2009年到2015年為第二階段,該階段主要以船體固定系統(tǒng)(Hull-Mounted System)為主,GNSS天線固定在船體頂部,姿態(tài)傳感器和換能器固定在船體底部,系統(tǒng)可以在船舶處于驅(qū)動(dòng)的狀態(tài)下連續(xù)觀測(cè),不但確保了觀測(cè)軌跡的可控,而且觀測(cè)時(shí)間也縮短到16~24 h,同時(shí)觀測(cè)精度也得到了提高(Fujita et al.,2006).2016年以后進(jìn)入第三階段,該階段以多聲吶測(cè)距(Multiple Acoustic Ranging)船體固定系統(tǒng)為主,第二階段的觀測(cè)系統(tǒng)在進(jìn)行海上觀測(cè)時(shí),采用的編碼技術(shù)是依次對(duì)每個(gè)測(cè)站的四個(gè)PXP目標(biāo)進(jìn)行順序觀測(cè),而新系統(tǒng)采用了新的信號(hào)編碼技術(shù),可對(duì)四個(gè)PXP同時(shí)進(jìn)行觀測(cè),有效提高了觀測(cè)效率和精度,每個(gè)測(cè)站的觀測(cè)時(shí)間縮短到3~4 h.
正是由于GNSS-A觀測(cè)效率和精度的不斷提高,海底形變監(jiān)測(cè)與研究也得到了很好的推廣應(yīng)用,尤其是在日本取得了較好的研究成果,下面從兩個(gè)方面簡(jiǎn)述GNSS-A在海底形變監(jiān)測(cè)與研究中的應(yīng)用現(xiàn)狀.
2.1 板塊俯沖與洋脊擴(kuò)展
第一個(gè)海底GNSS-A站建于1991年,目的是監(jiān)測(cè)胡安·德富卡板塊的運(yùn)動(dòng)(Spiess et al.,1998).該板塊是利用海底大地測(cè)量研究大洋板塊構(gòu)造運(yùn)動(dòng)與機(jī)理的天然實(shí)驗(yàn)室.根據(jù)NUVEL-1A板塊運(yùn)動(dòng)模型,該板塊沿卡斯卡迪亞俯沖帶以40 mm·a-1的速度向北美板塊俯沖,在板塊西南形成了以洋脊擴(kuò)展和轉(zhuǎn)換斷層為特征的邊界帶.在邊界帶南段以東約25 km處,由GNSS-A監(jiān)測(cè)的結(jié)果顯示,胡安·德富卡板塊的運(yùn)動(dòng)速率與板塊運(yùn)動(dòng)模型一致,連續(xù)80個(gè)小時(shí)的GNSS-A觀測(cè)結(jié)果表明,點(diǎn)位坐標(biāo)的重復(fù)精度可達(dá)±4~6 mm,能滿足很多海底構(gòu)造形變的監(jiān)測(cè)需求(Chadwell and Spiess 2008).
此外,目前該技術(shù)還在秘魯(Gagnon et al.,2005)、哥斯達(dá)黎加(Davis et al.,2011)、西南太平洋的新赫布里底群島(Ballu et al.,2013)和日本等俯沖帶地區(qū)的海底形變監(jiān)測(cè)與研究中得到了廣泛應(yīng)用(Bürgmann and Chadwell,2014).在秘魯近海,納斯卡板塊俯沖至南美板塊下,Gagnon等(2005)利用兩個(gè)GNSS-A測(cè)站,獲得了測(cè)站相對(duì)南美板塊的震間運(yùn)動(dòng)速率達(dá)53 mm·a-1,這種較高的運(yùn)動(dòng)速率表明俯沖帶以下2~40 km是完全耦合的,淺層的強(qiáng)閉鎖狀態(tài)說明發(fā)生在秘魯—智利海溝的地震足以產(chǎn)生巨大的破裂,并在海溝附近形成較大的同震滑動(dòng),由此引起的淺層地震波將使海溝附近的地形劇烈抬升,并導(dǎo)致特大海嘯(Satake and Tanioka,1999),如1996年秘魯海域發(fā)生的7.5級(jí)地震.
自1990年起,日本在其東海布設(shè)了幾十個(gè)海底形變監(jiān)測(cè)站(Fujimoto, 2014;Bürgmann and Chadwell,2014),以研究俯沖帶板塊運(yùn)動(dòng)及地震危險(xiǎn)性,并取得較好的研究成果.Yokota等(2016)利用日本南海海溝15個(gè)GNSS-A測(cè)站10多年的觀測(cè),獲得了該地區(qū)相對(duì)阿穆爾板塊的運(yùn)動(dòng)速度為2~5 cm·a-1,揭示了該地區(qū)存在明顯的滑移虧損率(SDRs),這些以前未知的高SDR區(qū)域具有較高的大震與海嘯風(fēng)險(xiǎn),研究結(jié)果首次揭示了俯沖帶的耦合狀態(tài)可能與當(dāng)?shù)氐牡卣鸹顒?dòng)和地質(zhì)現(xiàn)象有關(guān),為開展特大俯沖帶的地震研究提供了重要參考.
2.2 俯沖帶地震周期形變
板塊的匯聚與能量積累可引起俯沖帶地區(qū)M9及以上特大地震和數(shù)十米的形變,盡管特大俯沖帶的大多區(qū)域在震間被閉鎖在50 km的深度內(nèi),但有部分地區(qū)存在解耦并通過無震蠕滑來釋放能量,因此通過在俯沖帶建立GNSS-A測(cè)站,并進(jìn)行長(zhǎng)期觀測(cè),可以增進(jìn)我們對(duì)俯沖帶地震周期和前兆滑移瞬變的理解(Bürgmann and Chadwell,2014).
2011年的日本3.11M9.0大地震中,有7個(gè)GNSS-A測(cè)站精確地觀測(cè)到海底發(fā)生高達(dá)30多米的同震形變(圖2)(Sato et al.,2011;Kido et al.,2011;Fujiwara et al.,2011; Fujimoto,2014),據(jù)此所獲得的破裂模型顯示,同震的最大水平和垂直滑移超過50 m和10 m.研究結(jié)果對(duì)理解特大地震的震源機(jī)制、海嘯孕育過程及減災(zāi)具有重要作用(Iinuma et al.,2012).同時(shí),這些測(cè)站也為研究日本大地震的震后形變與模式提供了良好的形變約束(Tomita et al.,2017),震后4年的形變圖像顯示了地殼形變場(chǎng)具有明顯的空間變化特征,其中同震形變最大的區(qū)域以顯著的黏彈性松弛為主(圖3).
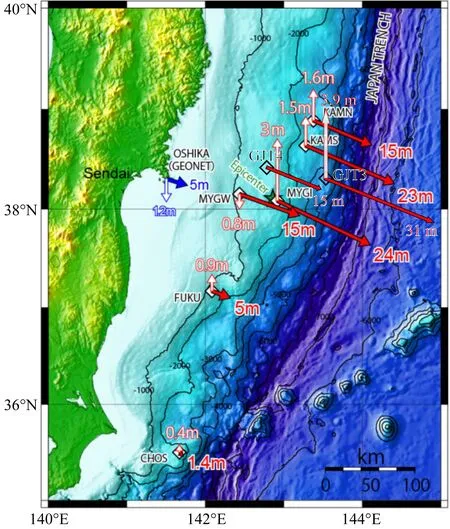
圖2 2011年日本東北M 9.0地震的海底同震形變場(chǎng)紅色實(shí)線箭頭為水平向,白色實(shí)線箭頭為垂直向(Sato et al.,2011;Kido et al.,2011;Fujiwara et al.,2011; Ozawa et al., 2011).Fig.2 Co-seismic seafloor crustal deformation field of the 2011 M 9.0 Tohoku earthquakeThe red solid arrow indicates the horizontal direction and the white solid arrow indicates the vertical direction (Sato et al.,2011; Kido et al.,2011;Fujiwara et al.,2011; Ozawa et al., 2011).
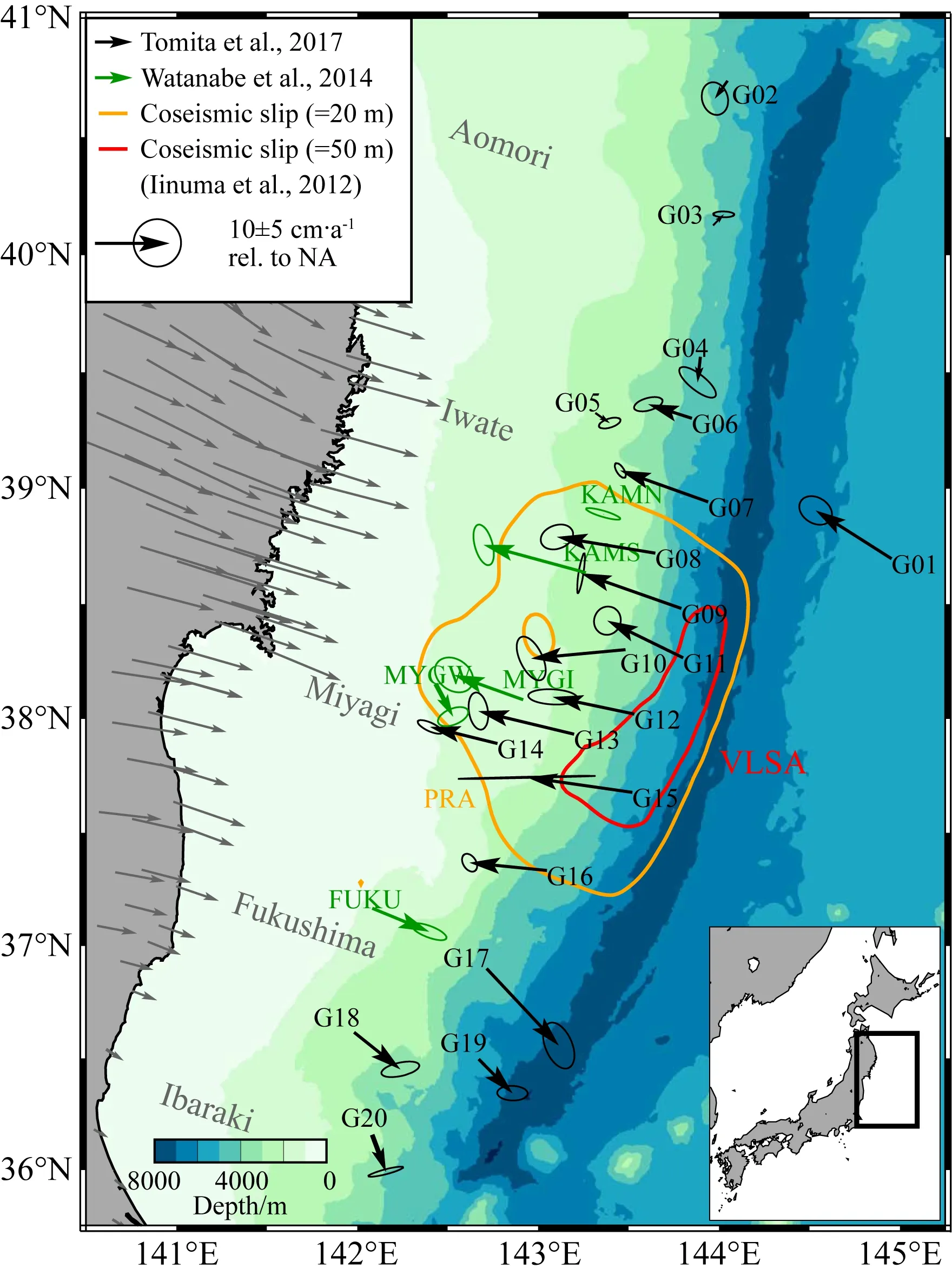
圖3 2011年日本東北M9.0地震的海底震后形變場(chǎng)Fig.3 Post-seismic seafloor crustal deformation field of the 2011 M9.0 Tohoku earthquake
Yokota和Ishikawa(2020)在日本南海海溝利用GNSS-A首次監(jiān)測(cè)到了大的淺層慢滑移地震事件(SSE),結(jié)果顯示在強(qiáng)耦合區(qū)域的淺部周圍存在較大的SSE,其時(shí)空分布與已有研究中預(yù)期的慢地震活動(dòng)有關(guān).該成果有助于揭示俯沖帶深部和淺部慢地震的相似性和差異,對(duì)開展板塊邊界相互作用的物理過程、海底地質(zhì)和地震活動(dòng)等交叉學(xué)科研究具有重要價(jià)值.
我國(guó)在海底大地測(cè)量及形變監(jiān)測(cè)方面已經(jīng)開展了技術(shù)跟蹤和理論研究(寧津生等,2014;楊元喜等,2017,2020;李林陽(yáng)等,2018),李明(1992)對(duì)海底控制網(wǎng)的精度及影響因素進(jìn)行了分析和模擬,吳永亭(2013)研制了長(zhǎng)基線水下差分GNSS 定位系統(tǒng),國(guó)家863計(jì)劃也開展了“水下GPS 高精度定位系統(tǒng)”研發(fā),實(shí)現(xiàn)了在淺水水域(幾十米)的成功測(cè)試,李林陽(yáng)等(2018)和劉經(jīng)南等(2019)指出我國(guó)在海底大地測(cè)量控制網(wǎng)建設(shè)和研究方面還存在很大差距,楊元喜等(2020)針對(duì)海底大地基準(zhǔn)網(wǎng)建設(shè)現(xiàn)狀及關(guān)鍵技術(shù)提出了中國(guó)的方案.雖然我們?cè)诤5仔巫儽O(jiān)測(cè)的某些方面已經(jīng)開展了預(yù)研工作,但由于某些自主技術(shù)和關(guān)鍵設(shè)備的研究稍顯滯后,目前在此領(lǐng)域的實(shí)際應(yīng)用尚屬空白,近年隨著我國(guó)海洋強(qiáng)國(guó)戰(zhàn)略的實(shí)施,國(guó)內(nèi)已開展了相關(guān)項(xiàng)目研究和實(shí)驗(yàn),其中楊元喜等(2020)研制的海底基準(zhǔn)方艙,在水深3000 m的海域進(jìn)行了測(cè)試,結(jié)果表明海底基準(zhǔn)點(diǎn)的坐標(biāo)分量?jī)?nèi)符合精度達(dá)1.2~4.7 cm.
綜上所述,經(jīng)過多年的發(fā)展,雖然GNSS-A技術(shù)已經(jīng)初步具備了與陸地相當(dāng)?shù)挠^測(cè)能力,并能滿足局部海底形變監(jiān)測(cè)的精度需求,但是高昂的費(fèi)用及技術(shù)難點(diǎn)極大地限制了海底地殼形變監(jiān)測(cè)的廣泛應(yīng)用(楊元喜等,2020),存在的主要挑戰(zhàn)如下:1)每天一艘海洋測(cè)量船的運(yùn)行和后勤保障費(fèi)用高達(dá)3萬(wàn)美元(Bürgmann and Chadwell,2014),經(jīng)濟(jì)性能較差;2)海底觀測(cè)站的PXP單元依靠?jī)?nèi)置電池保持連續(xù)待機(jī)狀態(tài),電池的壽命為10年左右,當(dāng)電池耗盡后,PXP將無法工作,因此需要定期維護(hù);3)GNSS-A在垂直向的觀測(cè)精度較差;4)難以開展大規(guī)模建站并實(shí)現(xiàn)連續(xù)和實(shí)時(shí)監(jiān)測(cè).
3 討論及展望
3.1 海底形變監(jiān)測(cè)關(guān)鍵技術(shù)
GNSS-A技術(shù)在海底形變監(jiān)測(cè)尤其是地震形變監(jiān)測(cè)與研究方面取得了較好的應(yīng)用成果(Bürgmann and Chadwell,2014;Ishikawa et al., 2020),但依然有很多關(guān)鍵問題需要解決,第一是觀測(cè)精度的提高,目前的觀測(cè)精度已經(jīng)達(dá)到厘米級(jí),通過提高單次觀測(cè)時(shí)間和觀測(cè)頻次,觀測(cè)精度可達(dá)亞厘米級(jí)(Bürgmann and Chadwell,2014),為了實(shí)現(xiàn)更高的觀測(cè)精度,必須減少以下誤差:GNSS定位誤差,GNSS天線到換能器偏差參數(shù)的測(cè)量誤差,海洋測(cè)量船的航跡測(cè)定誤差、姿態(tài)測(cè)定誤差以及聲學(xué)測(cè)距誤差等,目前隨著多模多頻GNSS精密定位技術(shù)的發(fā)展與進(jìn)步,GNSS定位精度也將不斷提高,如我國(guó)已建成的北斗三號(hào)衛(wèi)星導(dǎo)航定位系統(tǒng),采用了三種軌道衛(wèi)星組成的混合星座,其特有的高軌衛(wèi)星,有效提高了抗遮擋能力和觀測(cè)精度;第二是觀測(cè)模型與策略的優(yōu)化,主要涉及聲速剖面與觀測(cè)模式(Bürgmann and Chadwell,2014; 楊元喜等,2020),其中聲速剖面與水深密切相關(guān),在GNSS-A觀測(cè)期間,其垂向變化遠(yuǎn)大于水平變化,如何精確反演聲速剖面仍然存在一定的挑戰(zhàn)(Watanabe et al., 2020).對(duì)于觀測(cè)模式,雖然通過提高觀測(cè)頻率和時(shí)長(zhǎng)可以提高精度,但由于海洋測(cè)量船的使用成本很高,在一定程度上限制了GNSS-A技術(shù)的推廣應(yīng)用,因此如何有效提高海底形變監(jiān)測(cè)的經(jīng)濟(jì)效能,是目前需要解決的問題之一,無人波浪滑翔機(jī)已被用于GNSS-A海底形變的自動(dòng)觀測(cè),結(jié)果證明該方法是可行的(Iinuma et al., 2021),但由于波浪滑翔機(jī)的航速很慢,效率低,不宜在強(qiáng)洋流地區(qū)使用,同時(shí)也難以消除海水聲速結(jié)構(gòu)的不均勻性影響;第三是海底觀測(cè)單元與系統(tǒng)的長(zhǎng)期穩(wěn)定與運(yùn)維,海底觀測(cè)設(shè)備不但要抗壓、防腐, 還必須具備長(zhǎng)期工作能力,為此需要配備高性能的材料和電池,為實(shí)現(xiàn)原位維護(hù),可將海底測(cè)站設(shè)計(jì)為方艙模式(楊元喜等,2020),在條件允許時(shí)可在海底鉆孔以固定海底測(cè)站,同時(shí)也可采用有線連接進(jìn)行供電和數(shù)據(jù)傳輸?shù)炔呗?Bürgmann and Chadwell,2014);第四是多種海底觀測(cè)技術(shù)的聯(lián)合,海底壓力計(jì)可以提高垂直向的觀測(cè)精度,與GNSS-A聯(lián)合可以獲得精確的三維形變信息,但海底壓力計(jì)的漂移增加了觀測(cè)結(jié)果的不確定性;第五是采用特制的浮標(biāo)裝置實(shí)現(xiàn)海底形變的連續(xù)和實(shí)時(shí)監(jiān)測(cè),即將海洋測(cè)量船上的觀測(cè)系統(tǒng)轉(zhuǎn)移到海上的系泊浮標(biāo)上,通過太陽(yáng)能供電及衛(wèi)星通訊,實(shí)現(xiàn)海底測(cè)站的連續(xù)實(shí)時(shí)觀測(cè)(Tadokoro et al., 2020),該技術(shù)主要受制于太陽(yáng)能供電系統(tǒng)的連續(xù)性.
綜上所述, GNSS-A技術(shù)在精度、效率、穩(wěn)定性及實(shí)時(shí)性等方面還有待提高,部分技術(shù)有望在未來3~5年內(nèi)得到突破.
3.2 海底形變監(jiān)測(cè)與地震預(yù)測(cè)研究
GNSS-A在近海地震的同震、震間及震后形變監(jiān)測(cè)中具有不可替代的優(yōu)勢(shì),并能揭示地震活動(dòng)周期中的形變場(chǎng)特征,可為開展地震孕育及機(jī)理研究提供明確的約束和證據(jù)(Iinuma et al.,2012;Tomita et al.,2017;Yokota et al., 2020),因此利用GNSS-A技術(shù)開展海底形變監(jiān)測(cè),將為沿海地區(qū)地震預(yù)測(cè)預(yù)報(bào)研究提供一項(xiàng)關(guān)鍵技術(shù)支撐.
21世紀(jì)以來,印尼和日本由于特大地震及引發(fā)的海嘯分別造成30多萬(wàn)和7萬(wàn)多人死亡,并造成了巨大的經(jīng)濟(jì)損失及嚴(yán)重的次生災(zāi)害(如核污染).我國(guó)近海海域位于西太平洋西側(cè),擁有近300萬(wàn)平方公里的海域與32000 km長(zhǎng)的海岸線,其中東南沿海地處菲律賓板塊與歐亞板塊碰撞帶,應(yīng)力變化及積累較快,地震頻發(fā),該地區(qū)的M>7.0地震大多發(fā)生在近岸海域,如1604年的泉州8.0地震為該地區(qū)的最大地震(馬杏垣,1989).位于南海的濱海斷裂帶是華南塊體與臺(tái)灣海峽海盆的分界線,斷裂兩側(cè)地形差異大,地震活動(dòng)頻繁,曾發(fā)生過多次破壞性地震(曹敬賀等,2014; 鄧克,2019),其中1600年和1918年發(fā)生過兩次7級(jí)地震,而1918年的南澳7.3地震,還產(chǎn)生了海嘯(彭承光等,2017),造成巨大的人員和財(cái)產(chǎn)損失.位于東部的郯廬斷裂帶渤海段,第四紀(jì)以來活動(dòng)廣泛而強(qiáng)烈,主要受NEE-SWW向作用擠壓,中段地震活動(dòng)性最強(qiáng)(胡惟等,2013),1969年7月15日曾發(fā)生7.4級(jí)地震(李西雙等,2009).黃海也多次發(fā)生6級(jí)以上地震(彭艷菊等,2008).總之,我國(guó)近海的地震活動(dòng)與斷裂帶、俯沖帶等構(gòu)造密切相關(guān),地震的活動(dòng)性表明, 南海北部、渤海及臺(tái)灣海峽的地震活動(dòng)性較強(qiáng),黃海次之,東海最弱(王華玉,2014).
近海地震不但會(huì)造成沿海區(qū)域活動(dòng)斷裂帶的應(yīng)力變化而增加發(fā)生地震的風(fēng)險(xiǎn)(Stein et al., 1992),而且也可能遠(yuǎn)程觸發(fā)內(nèi)陸地震(Yao et al.,2015),2011年日本大地震發(fā)生后,研究人員于2012年沿日本海溝又新建了20個(gè)海底監(jiān)測(cè)站,用于研究震后形變及未來地震的風(fēng)險(xiǎn)(Tomita et al.,2017).我國(guó)沿海地區(qū)人口密集,經(jīng)濟(jì)發(fā)達(dá),如粵港澳大灣區(qū)、環(huán)渤海、東部沿海、東南沿海等經(jīng)濟(jì)快速發(fā)展與驅(qū)動(dòng)的重要地區(qū),對(duì)防震減災(zāi)有強(qiáng)烈的需求,因此為更好地服務(wù)沿海地區(qū)的經(jīng)濟(jì)建設(shè)與21世紀(jì)海上絲綢之路等,加強(qiáng)海底構(gòu)造運(yùn)動(dòng)監(jiān)測(cè)與近海地震預(yù)測(cè)研究,對(duì)提高抵御地震災(zāi)害風(fēng)險(xiǎn)的能力和保持經(jīng)濟(jì)可持續(xù)發(fā)展具有重要的現(xiàn)實(shí)意義和經(jīng)濟(jì)價(jià)值.
3.3 構(gòu)建統(tǒng)一框架下的陸海形變監(jiān)測(cè)網(wǎng)
大陸板塊與海洋板塊之間的相互運(yùn)動(dòng)導(dǎo)致海洋俯沖帶地區(qū)強(qiáng)烈的地殼變形和頻繁的強(qiáng)震活動(dòng),因此在海洋俯沖帶地區(qū)進(jìn)行地殼形變監(jiān)測(cè)與地震動(dòng)力學(xué)的研究中,聯(lián)合開展陸地與海洋的形變監(jiān)測(cè)非常必要,如在2011年日本大地震的破裂模型反演計(jì)算中,相對(duì)于單獨(dú)利用陸地GNSS觀測(cè)結(jié)果,聯(lián)合使用陸海同震形變資料,可更好地分辨出斷層的位錯(cuò)分布特征(刁法啟等,2012).另一方面,構(gòu)建統(tǒng)一框架的陸海形變監(jiān)測(cè)網(wǎng),獲取具有相同參考和基準(zhǔn)的地球物理場(chǎng)參數(shù)(地殼運(yùn)動(dòng)速度場(chǎng)、應(yīng)力應(yīng)變場(chǎng)及斷層滑移速率等),有助于深入而系統(tǒng)地理解沿海及周邊斷層的運(yùn)動(dòng)學(xué)特征及相互作用的動(dòng)力學(xué)機(jī)制.
目前我國(guó)陸地區(qū)域以“中國(guó)大陸構(gòu)造環(huán)境監(jiān)測(cè)網(wǎng)絡(luò)”、國(guó)家與省級(jí)連續(xù)運(yùn)行參考站網(wǎng)及國(guó)家2000網(wǎng)等高精度形變監(jiān)測(cè)工程為基礎(chǔ),構(gòu)建了具有統(tǒng)一框架的中國(guó)大陸現(xiàn)今地殼運(yùn)動(dòng)監(jiān)測(cè)體系,在陸地地殼形變監(jiān)測(cè)及地震機(jī)理研究方面發(fā)揮了重要作用(王琪等,2020;王敏等,2020),隨著我國(guó)對(duì)海洋資源、海洋經(jīng)濟(jì)及海洋安全等領(lǐng)域的需求日益強(qiáng)烈,加強(qiáng)海底形變監(jiān)測(cè)與研究已成為國(guó)家防震減災(zāi)事業(yè)的緊迫需求.
在海底形變監(jiān)測(cè)領(lǐng)域,我國(guó)雖然起步稍晚,但已積累了一定的研究與實(shí)踐基礎(chǔ),可通過借鑒國(guó)外已有技術(shù)的優(yōu)缺點(diǎn),在關(guān)鍵技術(shù)上實(shí)現(xiàn)自主創(chuàng)新和突破 (楊元喜等,2020),因此依托國(guó)家海底大地基準(zhǔn)網(wǎng)的建設(shè),結(jié)合我國(guó)沿海地區(qū)的構(gòu)造運(yùn)動(dòng)和地震監(jiān)測(cè)、研究及工程建設(shè)之需求(李小軍等,2020; 吳德城等,2020;謝卓娟,2020),建立中國(guó)的海底形變監(jiān)測(cè)網(wǎng),實(shí)現(xiàn)亞厘米級(jí)的監(jiān)測(cè)精度,并在此基礎(chǔ)上,構(gòu)建統(tǒng)一參考框架的陸海形變監(jiān)測(cè)系統(tǒng)是完全可行的(楊元喜等,2017, 2020;李林陽(yáng)等,2018;劉經(jīng)南等,2019).
致謝謹(jǐn)此祝賀陳颙先生從事地球物理教學(xué)科研工作60周年.感謝兩位評(píng)審專家對(duì)本文提出的寶貴意見和建議.
猜你喜歡
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
天津外國(guó)語(yǔ)大學(xué)學(xué)報(bào)(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學(xué)報(bào)(2017年2期)2017-07-05 08:13:02
國(guó)際商務(wù)財(cái)會(huì)(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19