線性運(yùn)動(dòng)平臺(tái)多自由度幾何運(yùn)動(dòng)誤差測(cè)量技術(shù)
2021-12-17 15:33:36蔡引娣王路輝高英豪范光照
計(jì)測(cè)技術(shù) 2021年5期
蔡引娣,王路輝,高英豪,范光照
(1.大連理工大學(xué) 微納米技術(shù)及系統(tǒng)遼寧省重點(diǎn)實(shí)驗(yàn)室,遼寧 大連116023;2.大連理工大學(xué) 機(jī)械工程學(xué)院,遼寧 大連116023)
0 引言
線性運(yùn)動(dòng)平臺(tái)在MEMS、芯片制造、生物醫(yī)療、集成電路、顯微觀測(cè)等領(lǐng)域得到了廣泛的應(yīng)用[1-3]。隨著加工和測(cè)量不斷向微觀領(lǐng)域發(fā)展,對(duì)線性運(yùn)動(dòng)平臺(tái)的定位精度提出了更高的要求。誤差補(bǔ)償法具有成本低、效率高、效果顯著的特點(diǎn),因此常被用于提高運(yùn)動(dòng)平臺(tái)的定位精度[4-5]。
誤差測(cè)量技術(shù)是誤差補(bǔ)償技術(shù)的基礎(chǔ)。單一線性軸存在六項(xiàng)運(yùn)動(dòng)誤差(定位誤差、水平直線度誤差、豎直直線度誤差、俯仰角誤差、偏擺角誤差、滾轉(zhuǎn)角誤差)。為了消除這六項(xiàng)運(yùn)動(dòng)誤差對(duì)運(yùn)動(dòng)平臺(tái)定位精度的影響,需要對(duì)其進(jìn)行高精度測(cè)量。傳統(tǒng)的測(cè)量方法單次只能針對(duì)單一誤差進(jìn)行測(cè)量,因此測(cè)量六項(xiàng)運(yùn)動(dòng)誤差耗時(shí)耗力,且傳統(tǒng)測(cè)量?jī)x器體積較大,無法集成在運(yùn)動(dòng)平臺(tái)上,也就無法實(shí)現(xiàn)在線測(cè)量。隨著科技的發(fā)展,激光多自由度誤差測(cè)量方法開始興起,但商用多自由度運(yùn)動(dòng)誤差測(cè)量?jī)x器體積較大、成本高,難以實(shí)現(xiàn)在線測(cè)量。因此,研究并提出體積小、易集成,且能同時(shí)測(cè)量多自由度運(yùn)動(dòng)誤差的方法,對(duì)運(yùn)動(dòng)平臺(tái)的誤差測(cè)量及誤差補(bǔ)償至關(guān)重要。
基于激光準(zhǔn)直原理和自準(zhǔn)直原理,匡萃芳[6]等人提出了一種簡(jiǎn)便的四自由度誤差測(cè)量方法,該方法可以同時(shí)測(cè)量水平和豎直直線度誤差、俯仰角誤差和偏擺角誤差;在此基礎(chǔ)上,翟玉生[7]和Huang[8]等人提出了五自由度運(yùn)動(dòng)誤差同時(shí)測(cè)量系統(tǒng),除上述四項(xiàng)運(yùn)動(dòng)誤差外,還可以測(cè)量滾轉(zhuǎn)角誤差。激光干涉原理也常被用于測(cè)量多自由度運(yùn)動(dòng)誤差。Gillmer[9]等人提出了一種外差干涉儀,通過對(duì)激光器的出射光進(jìn)行聲光調(diào)制,再采用差分波前傳感技術(shù)對(duì)干涉信號(hào)進(jìn)行處理,即可得到位移信息和俯仰角、偏擺角誤差信息。Hsieh[10]等人將激光干涉原理與激光準(zhǔn)直原理和自準(zhǔn)直原理相結(jié)合,提出了六自由度誤差干涉儀測(cè)量方法。在上述測(cè)量方法中,無論是使用高穩(wěn)定性的He-Ne激光器,還是低成本的半導(dǎo)體激光器作為光源,都不可避免地存在激光光束漂移。且上述測(cè)量方法多采用光電探測(cè)器作為誤差信號(hào)接收器,其靈敏度會(huì)受到激光光斑直徑和光強(qiáng)大小的影響。此外,在基于雙光束檢測(cè)法的滾轉(zhuǎn)角測(cè)量方法中,很難保證雙光束的絕對(duì)平行。因此,這些測(cè)量方法多處于研究和測(cè)試階段,未真正得到實(shí)際應(yīng)用。
針對(duì)上述問題,本文提出了一系列線性運(yùn)動(dòng)平臺(tái)多自由度幾何運(yùn)動(dòng)誤差測(cè)量方法和測(cè)量系統(tǒng)。在這些測(cè)量方法中,采用半導(dǎo)體激光器作為測(cè)量系統(tǒng)的光源,以減小測(cè)量系統(tǒng)的體積,使測(cè)量系統(tǒng)可以集成在線性運(yùn)動(dòng)平臺(tái)中,實(shí)時(shí)在線測(cè)量幾何運(yùn)動(dòng)誤差;針對(duì)半導(dǎo)體激光器存在光束漂移的問題,提出了一種激光光束漂移主動(dòng)抑制方法,實(shí)時(shí)減小光束漂移對(duì)測(cè)量系統(tǒng)測(cè)量準(zhǔn)確性、穩(wěn)定性和重復(fù)性的影響;針對(duì)激光光斑直徑和光強(qiáng)大小對(duì)光電探測(cè)器靈敏度的影響問題,提出了靈敏度補(bǔ)償模型;針對(duì)雙光束平行度對(duì)滾轉(zhuǎn)角誤差測(cè)量準(zhǔn)確性的影響問題,提出了平行度誤差補(bǔ)償模型。本文提出的這些多自由度幾何運(yùn)動(dòng)誤差測(cè)量系統(tǒng)具有體積小、成本低、易集成等優(yōu)點(diǎn),可在精密制造和精密測(cè)量設(shè)備等領(lǐng)域得到實(shí)際應(yīng)用。
1 多自由度運(yùn)動(dòng)誤差測(cè)量原理與系統(tǒng)
1.1 多自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)基本構(gòu)成
四象限光電探測(cè)器(QPD)是一種光電轉(zhuǎn)換元件,由四個(gè)性能相同的光電二極管組合而成。其工作原理為內(nèi)光電效應(yīng)中的光生伏特效應(yīng)。在激光多自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)中,QPD常被作為光斑位移量的測(cè)量元件。
圖1 (a)中,當(dāng)光斑位于QPD的中心位置時(shí),四個(gè)光電二極管將輸出相等的電流。圖1(b)中,當(dāng)光斑在X軸和Y軸偏離QPD中心位置時(shí),四個(gè)光電二極管的輸出電流不相等。此時(shí),四個(gè)光電二極管的輸出電流與光斑偏離位置x和y之間的關(guān)系如式(1)所示。
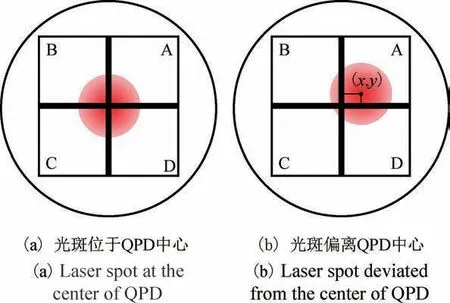
圖1 光斑位置示意圖Fig.1 Schematic diagram of laser spot position
式中:I1,I2,I3,I4分別為QPD四個(gè)光電二極管的輸出電流。
為了減小多自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)的體積,實(shí)現(xiàn)運(yùn)動(dòng)誤差在線測(cè)量,采用半導(dǎo)體激光器作為多自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)的光源。下文提到的多自由運(yùn)動(dòng)誤差測(cè)量系統(tǒng)均以半導(dǎo)體激光器為光源,以QPD為光斑位移量測(cè)量元件。
1.2 四自由度運(yùn)動(dòng)誤差同時(shí)測(cè)量方法
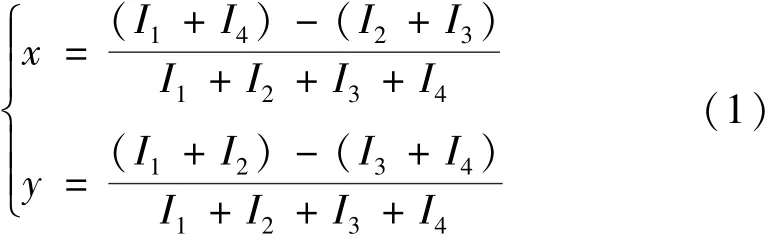
四自由度運(yùn)動(dòng)誤差同時(shí)測(cè)量系統(tǒng)原理如圖2所示。該四自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)由固定端和移動(dòng)端組成,可以同時(shí)測(cè)量豎直和水平直線度誤差、俯仰角誤差和偏擺角誤差。由固定端半導(dǎo)體激光器(LD)發(fā)射的準(zhǔn)直光束經(jīng)分光棱鏡(BS)后分為兩束光,透射光和反射光分別進(jìn)入位于移動(dòng)端的由四象限光電探測(cè)器QPD1組成的二維直線度誤差測(cè)量模塊和由聚焦透鏡(FL)與QPD2組成的二維角度誤差測(cè)量模塊。
圖2 四自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)原理圖Fig.2 Principle of four-degree-of-freedom motion error measurement system
當(dāng)移動(dòng)端在線性平臺(tái)上運(yùn)動(dòng)時(shí),線性平臺(tái)的水平直線度誤差(δx)和豎直直線度誤差(δy)會(huì)使準(zhǔn)直光束光斑在QPD1上發(fā)生沿水平和豎直方向的偏移量Δx1和Δy1。此時(shí),δx和δy可由式(2)計(jì)算得到。
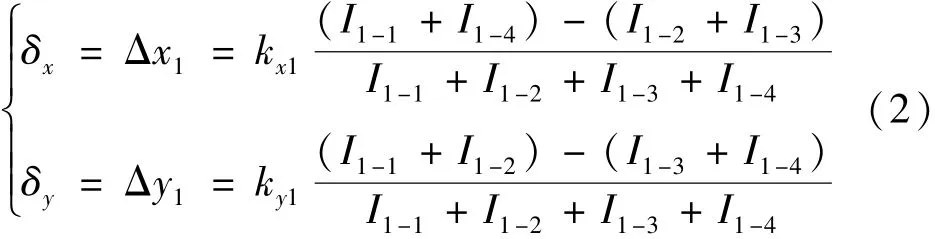
式中:kx1,ky1分別為QPD1在X和Y方向上的靈敏度;I1-i(i=1,2,3,4)為QPD1四個(gè)光電二極管的輸出電流。
當(dāng)線性平臺(tái)存在俯仰角誤差(θx)和偏擺角誤差(θy)時(shí),經(jīng)FL聚焦后的聚焦光斑在QPD2上會(huì)產(chǎn)生沿水平和豎直方向的偏移Δx2和Δy2。此時(shí),θx和θy可由式(3)計(jì)算得到。
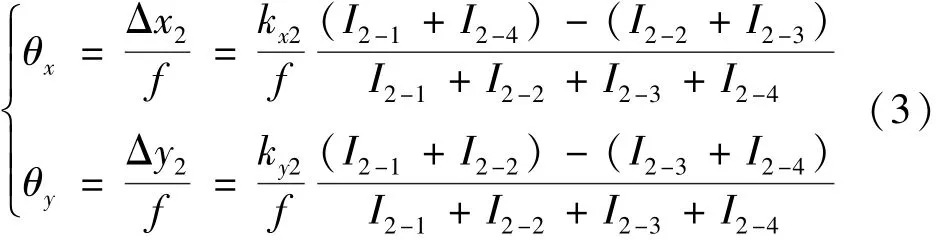
式中:kx2,ky2分別為QPD2在X和Y方向上的靈敏度;I2-i(i=1,2,3,4)為QPD2四個(gè)光電二極管的輸出電流;f為聚焦透鏡的焦距。
1.3 五自由度運(yùn)動(dòng)誤差同時(shí)測(cè)量方法
圖3 為線性平臺(tái)五自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)原理圖,其中M為平面反射鏡,AMM為角度調(diào)整架,Beam為光束,PZT為壓電陶瓷。該系統(tǒng)在四自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)的基礎(chǔ)上增加了滾轉(zhuǎn)角誤差(θz)測(cè)量模塊。同時(shí),該系統(tǒng)的固定端加入了1個(gè)偏振分光棱鏡(PBS)和2個(gè)四分之一波片(QWP1,QWP2),用于分光和防止由光學(xué)元件表面產(chǎn)生的反射光回射到半導(dǎo)體激光器諧振器內(nèi)引起光束震蕩;移動(dòng)端增加了1個(gè)四象限光電探測(cè)器(QPD3),和QPD1組合用于測(cè)量滾轉(zhuǎn)角誤差。
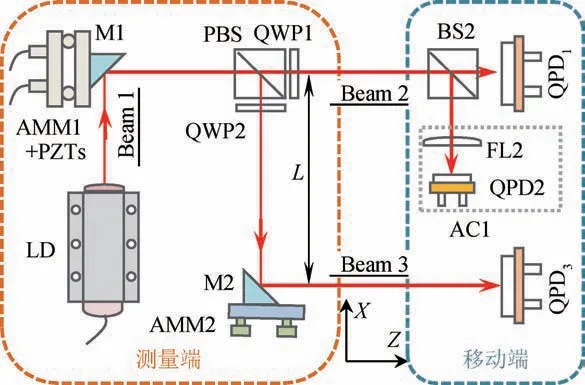
圖3 五自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)原理圖Fig.3 Principle of five-degree-of-freedom motion error measurement system
五自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)針對(duì)豎直和水平直線度誤差、俯仰角誤差和偏擺角誤差的測(cè)量原理與四自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)中的測(cè)量原理相同,此處不再贅述。本系統(tǒng)采用雙平行光束法原理測(cè)量滾轉(zhuǎn)角誤差,其測(cè)量原理如圖4所示。當(dāng)線性平臺(tái)不存在滾轉(zhuǎn)角誤差時(shí),光束2和光束3的光斑將位于QPD1和QPD3的中心處。當(dāng)線性平臺(tái)存在滾轉(zhuǎn)角誤差時(shí),兩個(gè)光斑在對(duì)應(yīng)QPD的Y軸方向上會(huì)有產(chǎn)生相應(yīng)的偏移量Δy1和Δy3。由幾何關(guān)系可得滾轉(zhuǎn)角誤差(θz)測(cè)量公式如式(4)所示。
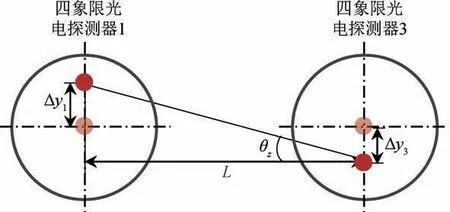
圖4 雙平行光束法原理圖Fig.4 Principle of double parallel laser beam method
式中:L為光束2和光束3之間的距離;ky1,ky3分別為QPD3在Y方向上的靈敏度;I3-i(i=1,2,3,4)為QPD1和QPD3四個(gè)光電二極管的輸出電流。由式(4)可知,θz的分辨力不僅取決于四象限光電探測(cè)器的分辨力,還取決于雙平行光束之間的距離。
1.4 六自由度運(yùn)動(dòng)誤差同時(shí)測(cè)量方法
本文提出的六自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)的原理如圖5所示。
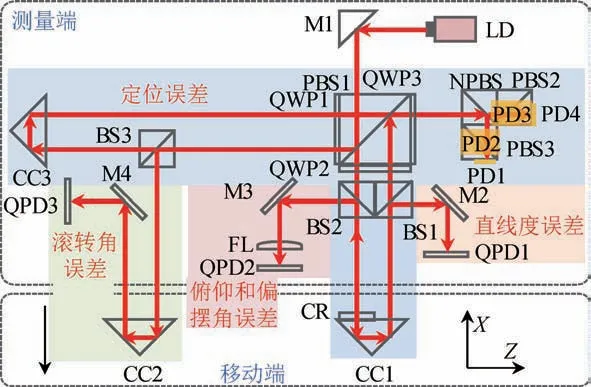
圖5 六自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)原理圖Fig.5 Principle of six-degree-of-freedom motion error measurement system
六自由度運(yùn)動(dòng)誤差同時(shí)測(cè)量系統(tǒng)由移動(dòng)端和固定端兩部分組成。移動(dòng)端由2個(gè)角錐棱鏡(CC1,CC2)和半透半反膜(CR)組成,無源的設(shè)計(jì)方式避免了移動(dòng)端線纜拖拽的問題,滿足高速高精度測(cè)量場(chǎng)合的應(yīng)用需求。
由于采用了角錐棱鏡和半透半反膜作為直線度誤差和角度誤差的敏感元件,測(cè)量豎直和水平直線度誤差、俯仰角誤差、偏擺角誤差和滾轉(zhuǎn)角誤差的分辨力均提高了一倍。
移動(dòng)端位移量z的測(cè)量基于激光干涉原理。從半導(dǎo)體激光器(LD)中出射的光經(jīng)過45°平面鏡(M1)反射,進(jìn)入偏振分光棱鏡(PBS1)后被分成兩束光,其中透射光P光為測(cè)量光,反射光S光為參考光。P光穿過四分之一波片(QWP2),相位改變45°,之后穿過分光棱鏡(BS2)和半透半反膜(CR),經(jīng)角錐棱鏡(CC1)回射,經(jīng)過分光棱鏡(BS1)后再次透過QWP2,此時(shí)測(cè)量光的相位改變了90°,P光變?yōu)镾光,并回到PBS1中。PBS1中測(cè)量光的偏振態(tài)E1為
式中:GQ3,GPBS1-P,GQ1,GPBS1-S為各光學(xué)元件的瓊斯矩陣參數(shù);E0為激光器發(fā)出光的偏振態(tài);i為虛部單位。
S光穿過四分之一波片(QWP1)和分光棱鏡(BS3),經(jīng)角錐棱鏡(CC3)回射,再次穿過QWP1,此時(shí)參考光的相位改變了90°,S光變?yōu)镻光,并回到PBS1中,PBS1中的參考光的偏振態(tài)E2為
式中:GQ2為光學(xué)元件的瓊斯距陣參數(shù)。
兩束光在PBS1內(nèi)匯聚并形成干涉,再經(jīng)過由消偏振分光棱鏡(NPBS),PBS2和PBS3組成的鑒相模塊,將干涉光分成偏振方向依次正交的四束光,分別由4個(gè)光電探測(cè)器(PD1,PD2,PD3,PD4)接收,其光強(qiáng)信號(hào)(IPD1,IPD2,IPD3,IPD4)分別為
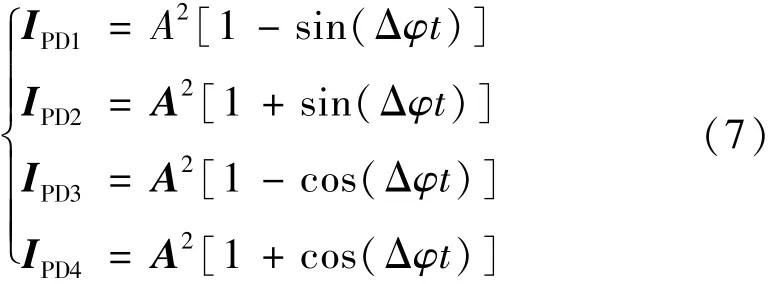
式中:A為干涉光的振幅;Δφ為兩束光的相位差;t為時(shí)間。
當(dāng)移動(dòng)端移動(dòng)Δz時(shí),根據(jù)波的疊加原理,光強(qiáng)信號(hào)I可以表示為

式中:I0為形成干涉光的光強(qiáng)大小;λ為激光的波長(zhǎng);n為介質(zhì)折射率。
位移z和相位變化量Δφ之間的關(guān)系可表示為

線性運(yùn)動(dòng)平臺(tái)的定位誤差Δz可以表示為

式中:d為線性運(yùn)動(dòng)平臺(tái)的系統(tǒng)位移輸出量;z為線性運(yùn)動(dòng)平臺(tái)的實(shí)際位移輸出量。
2 多自由度運(yùn)動(dòng)誤差測(cè)量精度影響因素
在基于半導(dǎo)體激光器的多自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)中,半導(dǎo)體激光器的穩(wěn)定性、四象限光電探測(cè)器的靈敏度和雙平行光束的平行度將影響多自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)的測(cè)量精度。下面對(duì)各影響因素及解決方法進(jìn)行具體分析說明。
2.1 半導(dǎo)體激光器穩(wěn)定性對(duì)測(cè)量結(jié)果的影響
理論上,半導(dǎo)體激光器的出射激光是一條直線,而實(shí)際上,由于半導(dǎo)體激光器自身諧振腔熱變形、激光器外部固定裝置緩慢機(jī)械位移、空氣各介質(zhì)折射率不同、大氣擾動(dòng)等原因,激光器的出射激光并非一條直線,存在激光光束漂移。激光光束漂移將影響以半導(dǎo)體激光器為光源的多自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)的穩(wěn)定性、精度和重復(fù)性。因此,需要對(duì)激光光束漂移進(jìn)行抑制。
常見的光束漂移抑制方法可以分為主動(dòng)抑制和被動(dòng)抑制,被動(dòng)抑制方法是指將漂移量測(cè)量出來,在最終的角度誤差和直線度誤差中對(duì)其進(jìn)行補(bǔ)償[11]。但是,偏移量是實(shí)時(shí)變化的,且多次測(cè)量中偏移量是任意的,不具有重復(fù)性,所以很難保證補(bǔ)償后數(shù)據(jù)的準(zhǔn)確性。主動(dòng)抑制是指采取主動(dòng)控制的方法將測(cè)量過程中產(chǎn)生的漂移量“消除”[12-13],角度誤差和直線度誤差的測(cè)量結(jié)果將不會(huì)受到漂移量的影響。本項(xiàng)研究提出了一種小型化、易集成、易操作的光漂主動(dòng)抑制方法[14-15]。為了方便敘述,將提出的光漂主動(dòng)抑制方法嵌入四自由度誤差測(cè)量系統(tǒng)中,如圖6所示。
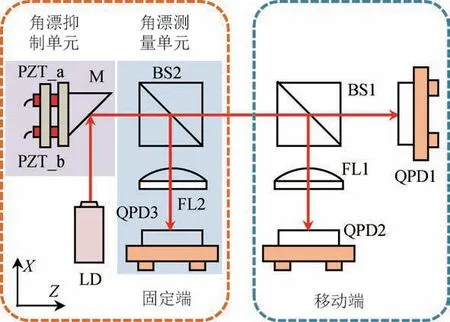
圖6 嵌入激光光束漂移主動(dòng)抑制系統(tǒng)的四自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)原理圖Fig.6 Four-degree-of-freedom motion error measurement system with an active laser drift compensator
LD的出射激光經(jīng)反射鏡M反射后射入BS2中,反射光射入由FL2和QPD3組成的角漂測(cè)量單元,實(shí)時(shí)測(cè)量半導(dǎo)體激光器的角漂。然后將測(cè)量得到的角漂量反饋到由精密二維角度調(diào)整架、PZT和直角反射鏡組成的角漂抑制單元,對(duì)角漂進(jìn)行實(shí)時(shí)主動(dòng)抑制。經(jīng)抑制后,BS2的透射光將不再包含激光光束偏移量,測(cè)量得到的四自由度運(yùn)動(dòng)誤差將不再受光束偏移的影響。
下面對(duì)角漂測(cè)量和抑制原理進(jìn)行介紹。當(dāng)激光器存在X和Y方向角漂Δεx和Δεy時(shí),角漂測(cè)量單元中QPD3上的光斑位置會(huì)隨之發(fā)生偏移(ΔxQPD3和ΔyQPD3)。半導(dǎo)體激光器的角漂(Δεx和Δεy)可由式(11)求得。
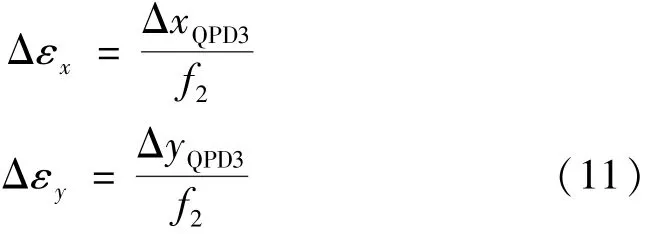
式中:f2為聚焦透鏡FL2的焦距。
根據(jù)測(cè)量得到的Δεx和Δεy,改變高精度二維角度調(diào)整架的角度,使從直角反射鏡M反射的光束傳播方向產(chǎn)生Δβx和Δβy的變化,從而使反射光平行于理想光軸,如圖7所示。
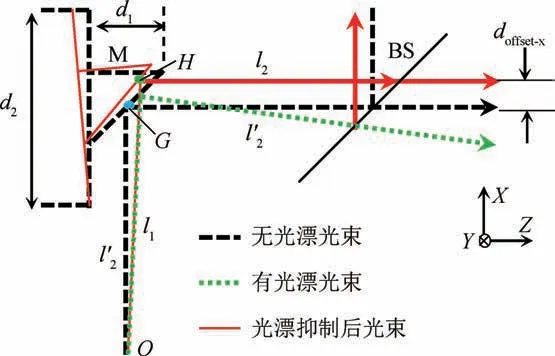
圖7 激光光束漂移主動(dòng)抑制原理圖Fig.7 Principle of active compensation of laser drift
設(shè)激光出射點(diǎn)為O(0,0,0),當(dāng)激光器不存在角漂時(shí),出射光線l1與反射鏡M的交點(diǎn)為G(l1,0,0)。當(dāng)激光器發(fā)射的激光存在角漂Δεy和Δεp時(shí),l1的方向向量由無角漂時(shí)的[1 0 0]T變?yōu)閇1 ΔεpΔεy]T,此時(shí),出射光線l′1與反射鏡M的交點(diǎn)為H。l′1可由以下直線方程表示

設(shè)反射鏡M在x,y方向上旋轉(zhuǎn)的角度分別為Δβx和Δβy,消除高階項(xiàng)后,反射鏡M的旋轉(zhuǎn)方程可表示為
因此,反射鏡M旋轉(zhuǎn)后,M′的法向量變?yōu)?/p>
因此,M′與l′1的交點(diǎn)H點(diǎn)的坐標(biāo)(xH,yH,zH)可表示為
此時(shí),M′反射光線l′2的方向向量為
式中:RM′為旋轉(zhuǎn)后反射鏡M′的反射矩陣。
當(dāng)激光器的角漂被完全抑制時(shí),l′2的方向向量應(yīng)為

聯(lián)立式(16)和式(17)可得二維角度調(diào)整架轉(zhuǎn)角(Δβx和Δβy)和激光器的角漂(Δεx和Δεy)之間的關(guān)系為
需要注意,提出的激光光束漂移主動(dòng)抑制方法中,由于反射鏡M的轉(zhuǎn)動(dòng),會(huì)引起激光光束與反射鏡交點(diǎn)的變化,即點(diǎn)G變?yōu)辄c(diǎn)H,從而使光漂抑制后的光束與無光漂的光束不重合,并在X方向和Y方向存在偏位doffset-x和doffset-y。doffset-x和doffset-y不會(huì)影響光束漂移抑制的結(jié)果,但是doffset-x和doffset-y將影響四自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)中直線度誤差的測(cè)量結(jié)果,所以需要在測(cè)量得到的直線度誤差測(cè)量結(jié)果中減去doffset-x和doffset-y帶來的影響,其中doffset-x和doffset-y可以表示為
式中:d1為激光器到反射鏡M的距離。
圖8 為激光光束漂移主動(dòng)抑制系統(tǒng)控制流程圖。系統(tǒng)的角漂測(cè)量單元測(cè)量得到激光角漂Δεx和Δεy,經(jīng)I/V轉(zhuǎn)換和放大后輸入至采集卡,之后傳輸至計(jì)算機(jī),在計(jì)算機(jī)中通過PID控制得到PZT的驅(qū)動(dòng)電壓,并通過采集卡將驅(qū)動(dòng)電壓發(fā)送到PZT驅(qū)動(dòng)器,改變PZT的長(zhǎng)度,以改變二維角度調(diào)整架的角度,實(shí)現(xiàn)激光角漂的主動(dòng)抑制。
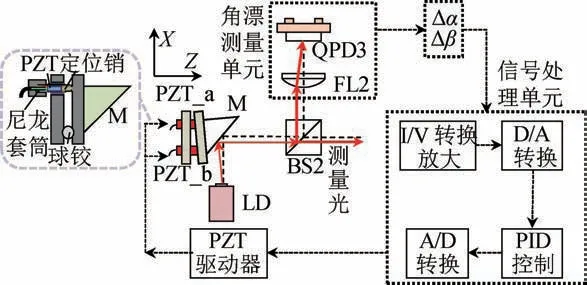
圖8 激光光束漂移主動(dòng)抑制系統(tǒng)控制流程Fig.8 Flowchart of control system of laser drift active compensation
激光光束漂移主動(dòng)抑制系統(tǒng)中,基于PZT的二維角度調(diào)整裝置制作方法如下:對(duì)高精度二維角度調(diào)整架的螺紋軸進(jìn)行鉆孔加工,然后將PZT置于孔中,PZT的前端用定位銷與二維角度調(diào)整架的前端連接,PZT的兩根導(dǎo)線從螺紋軸后端的通孔處延伸出來并與供電電源連接。紋軸尾端外部與尼龍?zhí)淄补潭ㄔ谝黄?以固定PZT。通過PID控制PZT伸長(zhǎng)或縮短,從而自動(dòng)改變二維角度調(diào)整架的角度,實(shí)現(xiàn)對(duì)激光角漂的實(shí)時(shí)抑制。
將上述激光光束漂移主動(dòng)抑制系統(tǒng)嵌入四自由度測(cè)量系統(tǒng),研究光漂抑制前后系統(tǒng)的穩(wěn)定性,測(cè)量數(shù)據(jù)如圖9所示。測(cè)量端和固定端之間的距離設(shè)置為1000 mm,采樣時(shí)間和采樣頻率分別設(shè)置為30 min和100 Hz。采用巴特沃斯濾波器濾除數(shù)據(jù)采集過程中噪聲信號(hào)的干擾。從圖9中可以看到俯仰角信號(hào)的穩(wěn)定性從角漂抑制前的2.6 arcsec提高到了角漂抑制后的0.5 arcsec,滾轉(zhuǎn)角信號(hào)的穩(wěn)定性從角漂抑制前的2.8 arcsec提高到了角漂抑制后的0.6 arcsec,證明本文提出的激光光束漂移主動(dòng)抑制方法可以有效地消除角漂對(duì)系統(tǒng)穩(wěn)定性的影響。
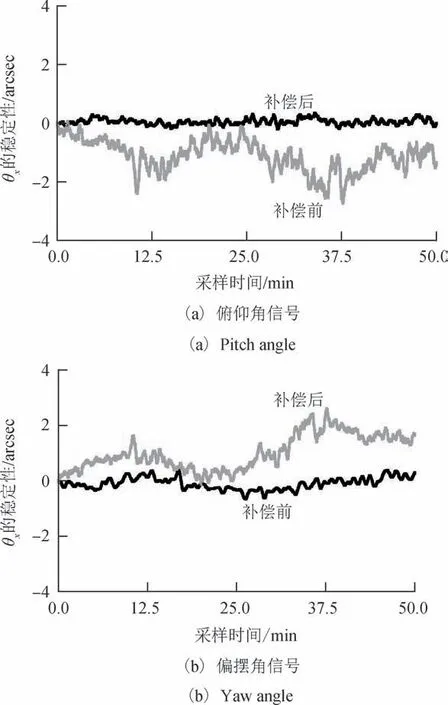
圖9 激光光束漂移抑制前后系統(tǒng)穩(wěn)定性Fig.9 System stability before and after active compensation of laser drift
2.2 靈敏度對(duì)測(cè)量精度的影響
由水平和豎直直線度誤差、俯仰角誤差、偏擺角誤差和滾轉(zhuǎn)角誤差的計(jì)算公式可知,四象限光電探測(cè)器的靈敏度將影響運(yùn)動(dòng)誤差的測(cè)量精度。用于測(cè)量直線度誤差和角度誤差的四象限光電探測(cè)器的靈敏度可以利用高精度位移傳感器和角度傳感器通過標(biāo)定實(shí)驗(yàn)得到。在測(cè)量過程中,通常假設(shè)四象限光電探測(cè)器的靈敏度固定不變,但是實(shí)際上激光器的光強(qiáng)和光斑直徑會(huì)隨著測(cè)量距離的變化而變化,這將會(huì)影響四象限光電探測(cè)器的靈敏度。為了消除四象限光電探測(cè)器的靈敏度變化對(duì)測(cè)量結(jié)果的影響,需要在測(cè)量過程中對(duì)四象限光電探測(cè)器的靈敏度進(jìn)行補(bǔ)償[14]。
補(bǔ)償方法如下:首先,采用傳統(tǒng)的四象限光電探測(cè)器靈敏度標(biāo)定實(shí)驗(yàn)分別標(biāo)定出移動(dòng)端位于測(cè)量起始位置(do)和測(cè)量終點(diǎn)(df)處四象限光電探測(cè)器的靈敏度,并定義為kmi_o和kmi_f(其中m=x,y;i=2,3)。通過前期的研究可知,四象限光電探測(cè)器的靈敏度與測(cè)量距離呈線性關(guān)系,因此在任意測(cè)量位置處(dm),四象限光電探測(cè)器的靈敏度可由式(20)求得。

通過式(20)即可消除因激光器的光強(qiáng)和光斑直徑隨測(cè)量距離變化而引起的四象限光電探測(cè)器靈敏度誤差,進(jìn)而消除其對(duì)五自由度運(yùn)動(dòng)誤差測(cè)量精度產(chǎn)生的影響。
在六自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)中,采用三個(gè)高精度四象限光電探測(cè)器測(cè)量水平和豎直直線度誤差、俯仰角誤差、偏擺角誤差和滾轉(zhuǎn)角誤差。以六自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)中QPD1的靈敏度為例,驗(yàn)證所提出的補(bǔ)償公式的有效性。
首先,采用Sylvac公司生產(chǎn)的型號(hào)為P12D HR的高精度位移傳感器分別在測(cè)量起始位置(do=80 mm)和測(cè)量終點(diǎn)(df=1160 mm)對(duì)QPD1的靈敏度進(jìn)行標(biāo)定。高精度位移傳感器的測(cè)量分辨力為0.01 μm,最大測(cè)量誤差為±0.22 μm。圖10是在do和df處標(biāo)定得到的X方向(kx2_o,kx2_f)和Y方向(ky2_o,ky2_f)QPD2的靈敏度。利用最小二乘法擬合得到的斜率值即為四象限光電探測(cè)器的靈敏度。可以看到do處和df處靈敏度不同,這也進(jìn)一步證明了測(cè)量距離的變化會(huì)引起靈敏度的變化。do處和df處QPD2X方向的靈敏度(kx2_o,kx2_f)分別為2112.95 μm/V和1683.28 μm/V,Y方向的靈敏度(ky2_o,ky2_f)分別為-1441.56 μm/V和-1093.40 μm/V。
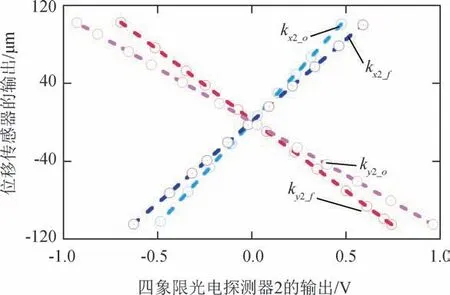
圖10 QPD2的X和Y方向的靈敏度Fig.10 Sensitivity of QPD2 in X and Y directional
將圖10中標(biāo)定得到的QPD2在do處和df處的靈敏度代入式(20),即可得到任意位置dm處QPD2的靈敏度km2_f(m=x,y),如圖11所示。
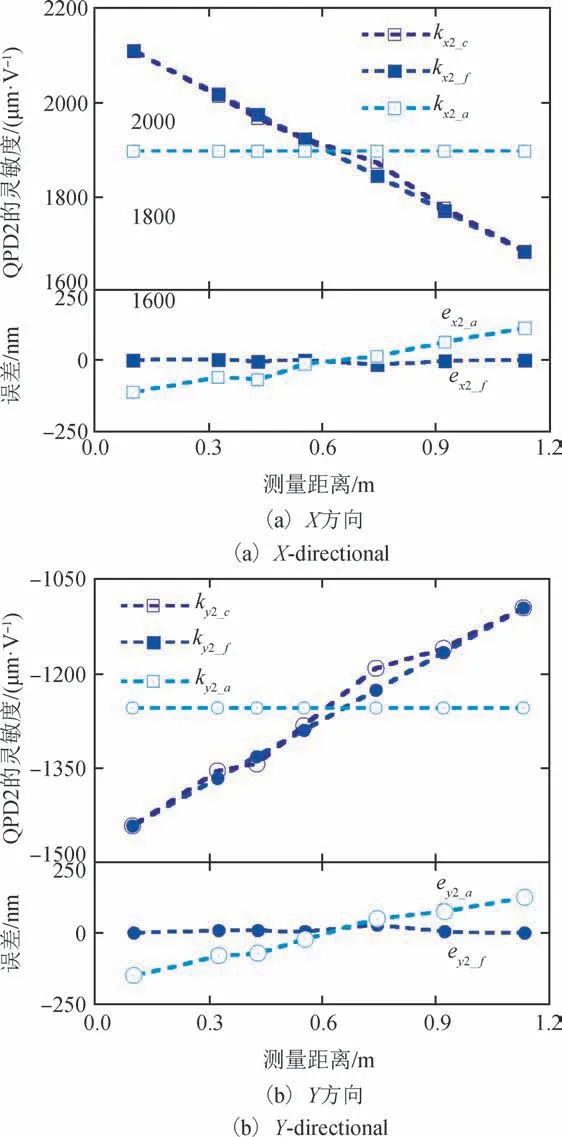
圖11 QPD2靈敏度造成的測(cè)量誤差Fig.11 Measurement error caused by sensitivity of QPD2
為了方便比較,采用高精度位移傳感器標(biāo)定出任意位置dm處QPD2的靈敏度km2_c。在之前的研究中,很多學(xué)者采用平均法計(jì)算四象限光電探測(cè)器的靈敏度,即根據(jù)do處和df處得到的靈敏度求平均作為QPD2在測(cè)量全程中的靈敏度km2_a。將km2_c和km2_a同時(shí)畫在圖11中。由圖11(a)可知,計(jì)算得到的km2_f與實(shí)際測(cè)量得到的km2_c很接近。當(dāng)光斑在QPD2上移動(dòng)1 μm,由X方向靈敏度kx2_f引起的測(cè)量誤差ex2_f在2~-15 nm;而由靈敏度kx2_a引起的測(cè)量誤差ex2_a大約為±112 nm。由圖11(b)可知,當(dāng)光斑在QPD2上移動(dòng)1 μm,由Y方向靈敏度ky2_f引起的測(cè)量誤差ey2_f在0~28 nm;而由靈敏度ky2_a引起的測(cè)量誤差ey2_a在127~-150 nm。由此可知,本研究提出的靈敏度補(bǔ)償公式可以有效消除由靈敏度變化所造成的測(cè)量誤差。
2.3 光束不平行對(duì)測(cè)量精度的影響
在基于雙平行光束的滾轉(zhuǎn)角誤差測(cè)量方法中,雙光束的平行度將直接影響滾轉(zhuǎn)角誤差的測(cè)量精度。在實(shí)際測(cè)量中,由于光束漂移、機(jī)械結(jié)構(gòu)蠕動(dòng)等因素的影響,很難保證兩束測(cè)量光束完全平行。本文提出了補(bǔ)償由不平行光束引起測(cè)量誤差的方法[14],原理如圖12所示。該方法借助商用水平儀完成補(bǔ)償,在補(bǔ)償前,將光束2調(diào)整至與線性平臺(tái)的運(yùn)動(dòng)軸同軸,即保證在測(cè)量起始位置和測(cè)量終點(diǎn)位置處光斑始終位于QPD2的中心位置。同樣,調(diào)整光束3,使其光斑在測(cè)量起始位置和測(cè)量終點(diǎn)位置處始終位于QPD3的線性測(cè)量區(qū)域。

圖12 雙平行光束不平行度引起測(cè)量誤差的補(bǔ)償原理Fig.12 Compensation principle of measurement error caused by non-parallelism of doube parallel beams
如圖12(a)所示,首先將移動(dòng)端移動(dòng)至do處,此時(shí)多自由度誤差測(cè)量系統(tǒng)和商用水平儀測(cè)量得到的滾轉(zhuǎn)角誤差分別記為θo_R和θo_L。然后,將移動(dòng)端移動(dòng)至df處,如圖12(b)所示,記錄兩個(gè)儀器測(cè)量得到的滾轉(zhuǎn)角誤差,分別為θf_R和θf_L。理論上,在兩個(gè)位置處,由兩個(gè)測(cè)量?jī)x器測(cè)量得到的滾轉(zhuǎn)角誤差應(yīng)該是相同的。但是由于兩平行光束的不平行度θp的存在,兩儀器在測(cè)量起始位置(do)和測(cè)量終點(diǎn)位置(df)處的輸出有如下關(guān)系
式中:Δy2_o和Δy3_o分別為QPD2和QPD3在測(cè)量起始位置(do)處的輸出;Δy2_f和Δy3_f分別為QPD2和QPD3在測(cè)量終點(diǎn)位置(df)處的輸出。
因此,不平行度θp可以表示為

因此,可以通過式(24)來補(bǔ)償由雙平行光束的不平度引起的任意位置dm處的滾轉(zhuǎn)角誤差。

式中:θz_R為多自由度誤差測(cè)量得到的滾轉(zhuǎn)角誤差。
用搭建的六自由度誤差測(cè)量系統(tǒng)測(cè)量線性平臺(tái)的滾轉(zhuǎn)角誤差。線性平臺(tái)的行程為1160 mm,設(shè)光束2和光束3之間的距離為120 mm。QPD2和QPD3的分辨力為0.1 μm,因此,六自由度誤差測(cè)量系統(tǒng)中滾轉(zhuǎn)角誤差的理論分辨力應(yīng)為0.17 arcsec。
同時(shí)采用商用水平儀測(cè)量線性平臺(tái)的滾轉(zhuǎn)角誤差。商用水平儀的最大測(cè)量誤差為±0.2 arcsec。圖13為滾轉(zhuǎn)角誤差測(cè)量結(jié)果,其中θr-R和θr-L分別為由多自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)和商用水平儀測(cè)量得到的滾轉(zhuǎn)角誤差;θr-C為補(bǔ)償后的滾轉(zhuǎn)角誤差。由圖13可知,由于不平行度的存在,多自由度運(yùn)動(dòng)誤差測(cè)量系統(tǒng)和商用水平儀測(cè)量得到的滾轉(zhuǎn)角誤差存在7.63 arcsec的殘差。將測(cè)量結(jié)果代入提出的誤差補(bǔ)償公式,對(duì)多自由度誤差測(cè)量系統(tǒng)的測(cè)量值進(jìn)行補(bǔ)償后發(fā)現(xiàn)測(cè)量殘差減小為±1.1 arcsec,證明本文提出的補(bǔ)償公式可以有效地補(bǔ)償由不平行度引起的滾轉(zhuǎn)角誤差測(cè)量誤差。
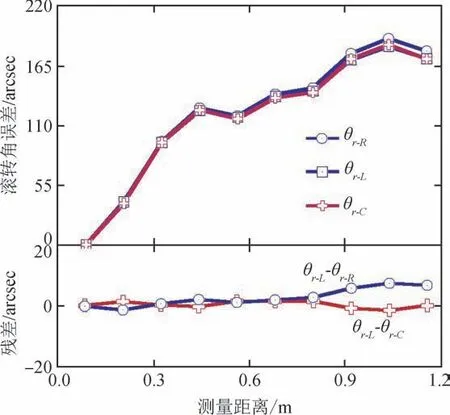
圖13 滾轉(zhuǎn)角誤差測(cè)量結(jié)果Fig.13 Measurement results of roll error
3 結(jié)論
線性運(yùn)動(dòng)平臺(tái)的多自由度幾何運(yùn)動(dòng)誤差將影響精密制造和測(cè)量的準(zhǔn)確性。誤差補(bǔ)償技術(shù)可以減少線性運(yùn)動(dòng)平臺(tái)多自由度幾何運(yùn)動(dòng)誤差對(duì)精密制造和測(cè)量準(zhǔn)確性的影響。為了提高誤差補(bǔ)償技術(shù)的準(zhǔn)確性,需要高精度地測(cè)量各項(xiàng)幾何運(yùn)動(dòng)誤差。為了實(shí)現(xiàn)對(duì)線性運(yùn)動(dòng)平臺(tái)多自由度運(yùn)動(dòng)誤差的高精度、多參數(shù)測(cè)量,本文根據(jù)測(cè)量需求,提出了一系列多自由度運(yùn)動(dòng)誤差測(cè)量方法。基于這些測(cè)量方法搭建的幾何運(yùn)動(dòng)誤差測(cè)量系統(tǒng)具有體積小、精度高和易集成等優(yōu)點(diǎn),可以安裝在精密制造和測(cè)量設(shè)備中,實(shí)時(shí)、在線、高精度地測(cè)量幾何運(yùn)動(dòng)誤差,為后續(xù)的誤差補(bǔ)償技術(shù)提供所需的誤差數(shù)據(jù)。這些測(cè)量方法將有效提高線性運(yùn)動(dòng)平臺(tái)多自由度幾何運(yùn)動(dòng)誤差測(cè)量的時(shí)效性和準(zhǔn)確性,為提高精密制造準(zhǔn)確性和精密測(cè)量準(zhǔn)確性提供有力的技術(shù)支撐,且具有實(shí)際應(yīng)用價(jià)值。未來將進(jìn)一步開展線性運(yùn)動(dòng)平臺(tái)多自由度幾何運(yùn)動(dòng)誤差測(cè)量?jī)x器的研發(fā),以推動(dòng)我國(guó)重要儀器國(guó)產(chǎn)化發(fā)展。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45