電驅自走式農機測試平臺的設計
2021-12-17 08:38:09余濤劉俊杰楊存志葉巖孫先明李國林
農業科技與裝備 2021年6期
關鍵詞:設計
余濤 劉俊杰 楊存志 葉巖 孫先明 李國林


摘要:為解決測試平臺體積大、結構復雜的問題,設計一種輪距可調的自走式農機測試平臺,利用靜力學分析使平臺主框架輕量化。性能試驗結果表明,平臺性能達到設定值,平道行駛速度5.4 km/h,搭載質量150 kg。
關鍵詞:測試平臺;自走式;設計;受力分析;輕量化
中圖分類號:S220.2? ? 文獻標識碼:A? ? 文章編號:1674-1161(2021)06-0045-03
精準農業需要實時采集農作物生長狀態,測量土壤、空氣等環境指標。自走式農機試驗測試平臺可長時間在田間采集信息,替代人觀測和記錄。近年來,低能耗、無污染、噪聲小、傳動效率高已成為農機的設計方向。然而,現有的測試平臺體積大,結構復雜。為此,采用鋰電池和純電動控制,設計一種輪距可調的自走式農機測試平臺。該平臺以400Ah三元鋰電池為電源,四輪分別由4臺伺服電機110M-06030C5BE驅動,搭載農機、儀器進行田間精準作業,可連續工作8 h。
1 測試平臺原理與參數
1.1 工作原理
試驗檢測平臺以鋰電池為動力能源,車載計算機按規劃路徑選擇行走速度和轉彎半徑,計算每個輪的對應轉速,4臺伺服電機110M-06030C5BE分別驅動四輪行走。同時,車載計算機依據轉彎半徑計算每個輪的轉彎角度,由另外4臺伺服電機80M-02430C5BE分別控制四輪方向,使檢測平臺按預定路線行駛。平臺主要由主框架、伺服減速輪邊電機、轉向電機、輪距調節電缸、動力鋰電池和導航及控制部分組成,具體如圖1所示。
平臺的主要特點有:由四輪獨立驅動,輪轂減速,方便整體布局;提高平臺的離地間隙,可以采用多種轉向方式;通過8臺伺服電機改變擺臂與主框架夾角,實現輪距1.00~1.95 m無級可調,增加平臺的適應性。
1.2 主要技術參數
外形尺寸(工作時):2 400 mm×1 350 mm×1 750 mm;作業速度:0.3~5.4 km/h;輪距:1 000~1 950 mm;離地間隙:850 mm;平臺載重:150 kg;電池容量:400 Ah。
2 測試平臺關鍵部件設計
2.1 驅動電機匹配設計
平臺在田間試驗時的移動速度較慢,因此空氣阻力和加速阻力可忽略,主要受到滾動阻力、坡阻力和牽引阻力,平整田間的坡阻力簡化為零,具體受力情況見圖2。
試驗平臺最大功率PT=(Ff+FT)·V。式中,Ff為滾動阻力,由平臺質量220 kg和滾動阻力系數0.1計算確定為29 kg·f;FT為牽引阻力,根據牽引單犁鏵耕深20 cm、土壤比阻R=0.8計算確定為320 kg·f;V為平臺行駛速度,取6 km/h。
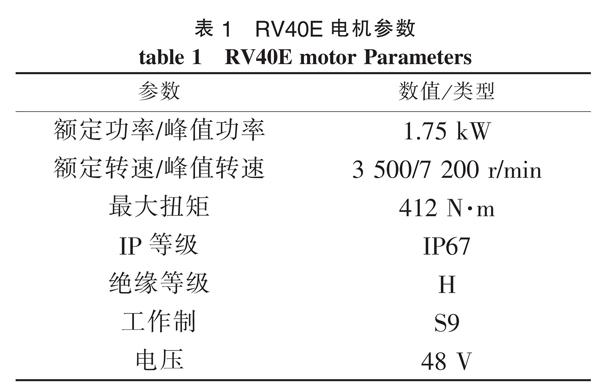
根據試驗平臺額定功率PN=(0.5~0.7)PT可得PN為3.65 kW。機具為四輪驅動,故單輪電機功率應≥0.9 kW,故選定驅動電機RV40E,其相關參數如表1所示。
2.2 主框架設計
主框架為矩形管60 mm×40 mm×3 mm焊合而成,使用Solidworks三維實體建模軟件建模,并簡化成分析模型。用Solidworks CosMos/Works分析零件的靜力學性能,主框架四角加約束,下梁加200 kg法向載荷,設定網格單元48.237 mm,運算單元總數
67 846個。分析得出應力、合位移、應變的分布情況。
在認真分析合位移變形后,在合位移變形最大區域的開口處增加1豎梁,在合位移變形最小處減少4個橫梁。在保證強度和剛度的前提下,主框架質量從136.5 kg減到123.8 kg,輕量化9.3%。優化后主框架開口合位移變形0.92×10-3 mm,遠小于優化前的位移變形(3.37×10-3 mm),說明優化后主機架具在同樣載荷下,機架強度增加,框架結構優化。合位移優化前后比較見圖3.
2.3 輪距調整設計
將輪側支撐與主框架橫向連接部位設計為擺動式套接,使輪距可調,如圖4所示。由電動推桿2接受控制器信號,推拉范圍43~10 mm,擺臂3繞O點從A位置轉動到B位置,角度擺動范圍0~75 °,輪距調整從1.0~1.8 m。同時,四輪端面可反向轉動,以保持互相平行,適應各種的行距和作業空間。
3 測試平臺性能試驗
為驗證試驗平臺的性能指標,結合國家相關標準試驗方法,搭建試驗平臺電驅動的控制系統。于2020年10月對額定載荷下的試驗平臺進行平地試驗,各種工況下的實測結果如表2所示。由試驗結果可以看出,試驗平臺的各參數均達到設計目標;平道行駛速度5.4 km/h,搭載質量150 kg。
4 結論
電驅自走式農機試驗測試平臺采用四輪轉向控制,轉向靈活多樣;離地間隙大于850 mm,通過性高。該機通過調節電缸改變輪距,輪距調幅達100~1 800 mm,能夠適應多種行距的作物試驗。由4臺伺服減速輪邊電機驅動,實現電子差速和無級變速,提高行走性能和驅動力,可滿足各種轉向方式要求。目前,整機控制中的通用性有待模塊化,需要完善相應的控制模型,提高平臺功能模塊的適用性和易擴展性。
參考文獻
[1] 丁幼春,詹 鵬,周雅文,等.北斗定位田間信息采集平臺運動控制器設計與試驗[J].農業工程學報,2017,33(12):178-183.
[2] 陳黎卿,詹慶峰,王韋韋,等.純電動試驗平臺電驅動系統設計與試驗[J].農業機械學報,2018,49(8):388-392.
[3] 張鐵民,黃 翰,黃鵬煥.電動輪式移動小車控制系統設計與試驗[J].農業工程學報,2014,30(19):12-17.
[4] 張超,朱思洪,王軍洋,等.太陽能園藝拖拉機驅動系統匹配設計與性能分析[J].農業工程學報,2015,31(11):24-30.
[5] 馬旭穎,張智勇,高德華,等.基于云服務架構的田間信息采集與分析系統設計[J].農業機械學報,2019,50(S1):122-127.
[6] 李玲玲,孟長伊,張磊,等.拖拉機懸掛系統田間作業信息感知技術應用研究[J].價值工程,2019,38(8):167-169.
Design of Electric Drive Self-Propelled Agricultural Machinery Testing Platform
YU Tao, LIU Junjie, YANG Cunzhi, YE Yan, SUN Xianming, LI Guolin
(Heilongjiang Institute of Agricultural Mechanical Engineering Science, Harbin 150081, China)
Abstract: In order to solve the problems of large size and complex structure of test platform, a self-propelled agricultural machinery test platform with adjustable wheel base was designed, and the main frame of the platform was lightweight by statics analysis. The performance test results show that the performance of the platform reaches the set value, the speed on flat road is 5.4km /h, and the carrying mass is 150 kg.
Key words: test platform; self-propelled; design; force analysis; light weight
收稿日期:2021-06-22
作者簡介:余 濤(1968—),男,高級工程師,從事畜牧養殖機械和農機測試設備的設計研究工作。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04