深空探測器在軌推力器參數辨識方法
2021-12-21 09:09:46信思博趙訓友鄭藝裕李綠萍
中國空間科學技術 2021年6期
信思博,趙訓友,鄭藝裕,李綠萍
上海衛星工程研究所,上海 200240
1 引言
中國火星探測器天問一號于2020年7月23日發射,隨后進入地火轉移軌道。不同于常規地球高軌衛星,天問一號探測器僅需不到一周時間完成變軌,在接下來的任務飛行中,需經歷中途修正、近火制動捕獲、環火軌道調整和保持、器器分離等變軌流程[1-2],涉及推進系統多次工作,其狀態的穩定與健康與否直接決定任務的成敗。此外,地面需根據推力大小、方向偏差、燃料比沖等參數制定軌控策略,其實際工作參數的穩定直接影響策略的制定和修正,因此通過在軌參數辨識,分析推力大小、推力方向、整器質心等參數尤為必要[3-6]。例如日本的隼鳥號小行星探測器利用飛輪轉速變化識別出霍爾推力器故障,采取了相應的補救措施[7],避免了航天器完全失效。
通常在軌推進系統參數標定主要依靠測定軌結果反算推力器產生的沖量。該方法主要針對主發動機的參數標定,可以根據點火時長遙測標定出推力大小和推力方向。而姿控推力器由于推力過小,難以對軌道產生較大影響,因而無法標定。此外,地面還常常根據軌控期間管路壓力變化,估算發動機推力,但該方法嚴重依賴發動機地面試車結果,當衛星在軌的管路溫度、空間外熱流等環境發生變化時,通常該方法無法準確反映發動機推力特性。文獻[8-9]用遞推最小二乘法對航天器質心參數進行標定,進而推算出推力器推力大小。缺點是需要建立在空間干擾力矩是偽隨機的條件下,保證多組推力器的噴氣時長盡可能接近,減少系統誤差。文獻[10]以連續小推力航天器為背景,提出了綜合考慮星載加速度計和推力器在軌標定的自主導航方案,但需要長期的軌道變化數據做反演迭代。此外還需建立高精度的引力場模型,在深空環境下各天體的引力攝動極為微弱,太陽系內大天體的引力場建模難以達到迭代需求。文獻[11]描述了嫦娥一號探測器的在軌標定方法,在任務中使用了控前和控后的精密軌道數據以及加速度遙測,對沉底、軌控過程的速度增量進行了測量,同時對加速度計的刻度因數等參數進行了標定。另外將測量數據迭代進下一次軌控策略計算中,以提高控制精度,取得了良好的效果。該方法的缺陷是需要地面測定軌精度直接影響標定精度,在深空探測領域隨著航天器飛行距離越來越遠,測定軌精度逐步下降,發動機標定精度也隨之變差。文獻[12]針對一種海洋測高衛星質心測量的需求,提出了一種更符合工程實際情況的在軌估計衛星質心的改進算法,綜合考慮了實際推力器推力誤差及陀螺儀的測量誤差,采用總體最小二乘法求解,克服了以往算法不能適應實際工程中存在推力誤差的缺陷,具有一定的理論和工程實用價值。
針對深空任務的特殊性,探測器在飛行過程中通常需進行多次點火用于變軌、減速剎車等動作,在此過程中整器質心發生劇烈變化,發動機推力參數嚴重影響變軌精度。且深空探測器飛行距離遠,軌道定位精度差,常規地球衛星依靠的測定軌的標定方法在此無法適用。深空環境下溫度、光照處于時變狀態,無法為探測器提供穩定的推進管路工作環境,因此也無法通過上一次的點火標定結果預測后續的推力器工作性能[13-15]。在深空環境下航天器的推進系統參數需依靠自身相關遙測進行辨識。
2 質心和推力矢量估計算法
火星探測器在地火轉移階段正常飛行時保持對日姿態,由于此時已遠離地月系統,重力梯度和氣動力矩微乎其微,空間環境中僅有光壓力矩作用于航天器上。在對日姿態基準下探測器慣性姿態角一天僅變化不到0.2°,因此短期內可認為探測器保持慣性姿態,且空間干擾力矩為常值。探測器通過周期性的噴氣卸載減少干擾力矩累積,每次卸載時滿足姿態動力學方程[16]。
(1)
式中:Tp為噴氣力矩;Te為空間干擾力矩;HB和Hw分別為整器和飛輪的角動量。火星探測器在卸載前后的穩定狀態下,整器慣性姿態角速度變化極小,忽略不計,主要由飛輪對角動量進行吸收,由此可根據飛輪轉速變化直接得到外力矩產生的角動量:
(2)
探測器保持對日固定姿態,空間干擾力矩短期內近似常值,可通過穩態時飛輪轉速變化曲線進行擬合,斜率即為干擾力矩幅值。由此解出每次噴氣卸載產生的角動量[17]。
噴氣卸載力矩為:
Tp=(rp-r0)×Fp
(3)
式中:rp為推力器喉部坐標;r0為探測器在軌質心坐標;Fp為推力器推力矢量。推力器喉部坐標根據整器布局可事先確定,整器質心和推力矢量為求解目標參數。根據各組推力器工作時角動量的不同變化,組成方程組聯合求解參數。
3 推力器布局
探測器的環繞器部分共安裝了1臺3 000 N發動機和6組標稱推力25 N的姿控推力器,用于飛行過程中軌道調整以及角動量卸載等操作。在衛星底板-x面布置了4組姿控推力器,用于Y、Z軸控制,另外2組布置在環繞器+Z側控制X軸,推力器布局和局部坐標系定義如圖1所示。
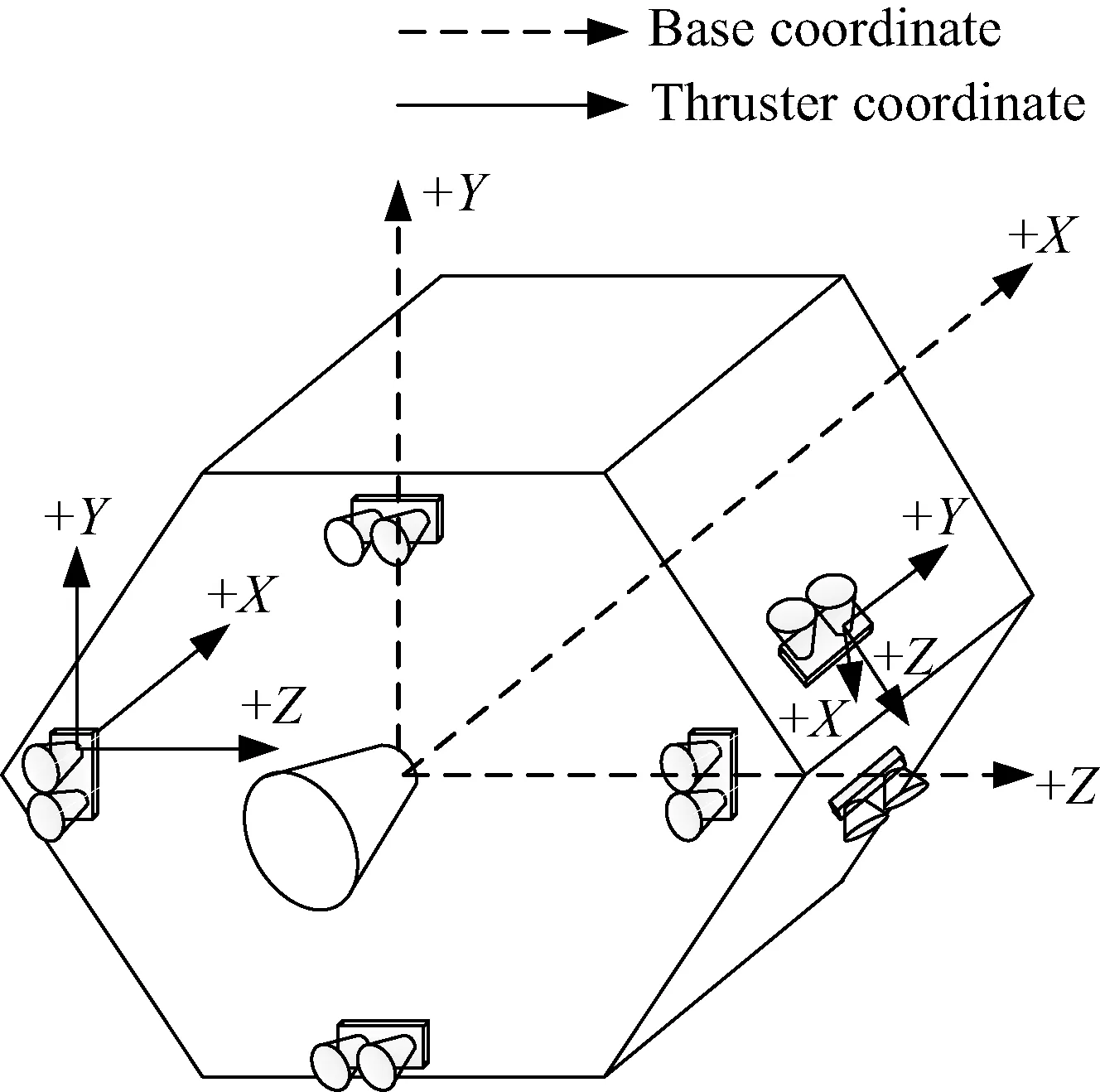
圖1 推力器布局示意Fig.1 Layout diagram of thrusters
每組推力器包含2個噴嘴,安裝在同一個支架上,考慮到2個噴嘴距離較近且采用了共基準安裝,空間外部熱環境狀態接近,可認為二者的推力方向產生相同方向的偏差。推力器坐標系到衛星本體系的標稱安裝矩陣用Cbp表示。由式(3)可知,推力器每次噴氣可得3組等式,質心坐標為未知量,用3個參數表示坐標值。同樣的方式,推力矢量在空間中用推力大小|F0|、推力橫向角度偏差θ、推力縱向角度偏差φ三個參數表示。因此每個推力器噴氣用含6個未知參數的3個等式表示:
(4)
由于在軌飛行過程中各推力器每次噴氣受管路壓力、溫度、電磁閥閥芯運動特性等因素影響,推力大小存在一定波動,每次產生的噴氣沖量不完全相同,上式中參數推力大小|F0|為噴氣脈沖的平均推力。
顯然單個推力器噴氣得到的解算方程組,待求解參數數量大于線性方程數量,無法得到有效解析解。使用安裝在同一個支架上的2個推力器噴氣數據時,得到6個方程,待求解參數包括質心坐標(3個參數)、推力角度偏差(橫向和縱向偏差2個參數)、推力大小(A和B推力器推力大小2個參數),共7個。以此類推,使用3組推力器數據時,可得到18個方程,而由于質心參數相同,待求解參數只有15個,因此可得到有效的解析數值。
第m個推力器噴氣產生的姿態擾動動力學方程為:
(5)
當標稱推力方向與坐標軸平行時,在該坐標軸方向上的質心坐標的解算方程易出現奇異,造成解析精度不高。為保證解析精度,選取的參與計算的3組推力器,至少有1組不與坐標軸重合。
4 在軌數據驗證
采用中國首顆火星探測器天問一號在巡航段的噴氣卸載數據進行分析。此時探測器距地球超過3×106km,并且尚未到達火星影響球,空間外力矩僅有光壓力矩。姿態保持對日巡航姿態,姿態角速度變化極小,在數天的時間尺度內可以視作慣性姿態,是研究空間光壓力矩的理想測試平臺。
表1給出了探測器6組推力器喉部的坐標以及標稱推力矢量,即式(4)(5)中的參數rp。
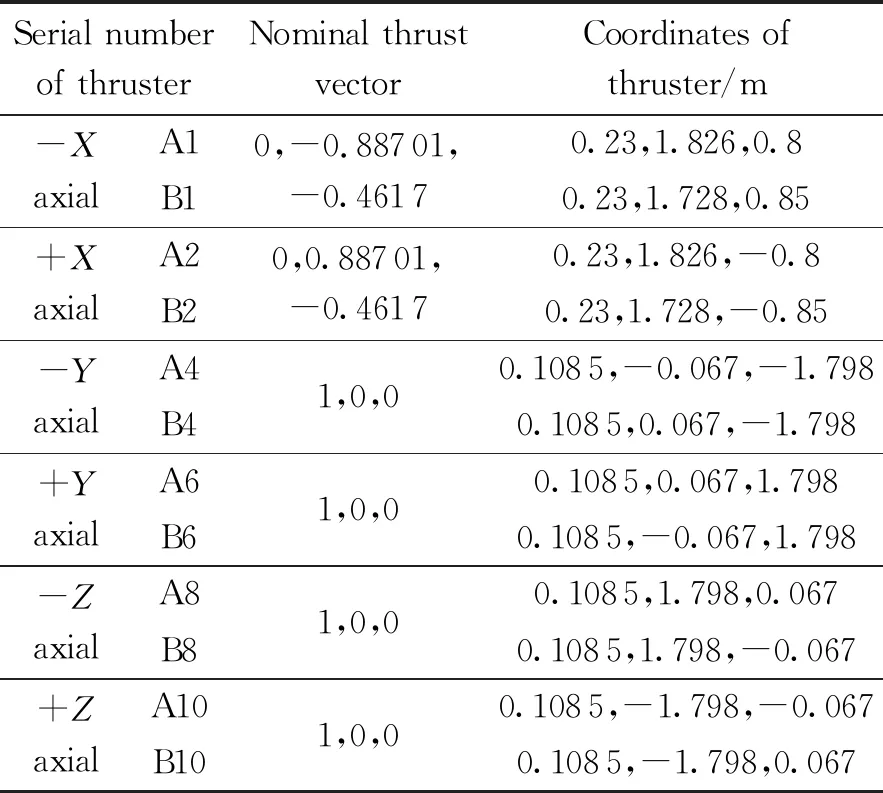
表1 推力器布局參數
根據布局關系,Y軸、Z軸推力器裝在底面,標稱安裝矩陣Cbp為單位陣。X軸推力器裝在側面,根據布局關系可知正負兩組推力器安裝矩陣為:
選取2020年8月的6次不同推力器的噴氣卸載數據,噴氣前后三軸飛輪轉速的變化情況如圖2~圖7所示。
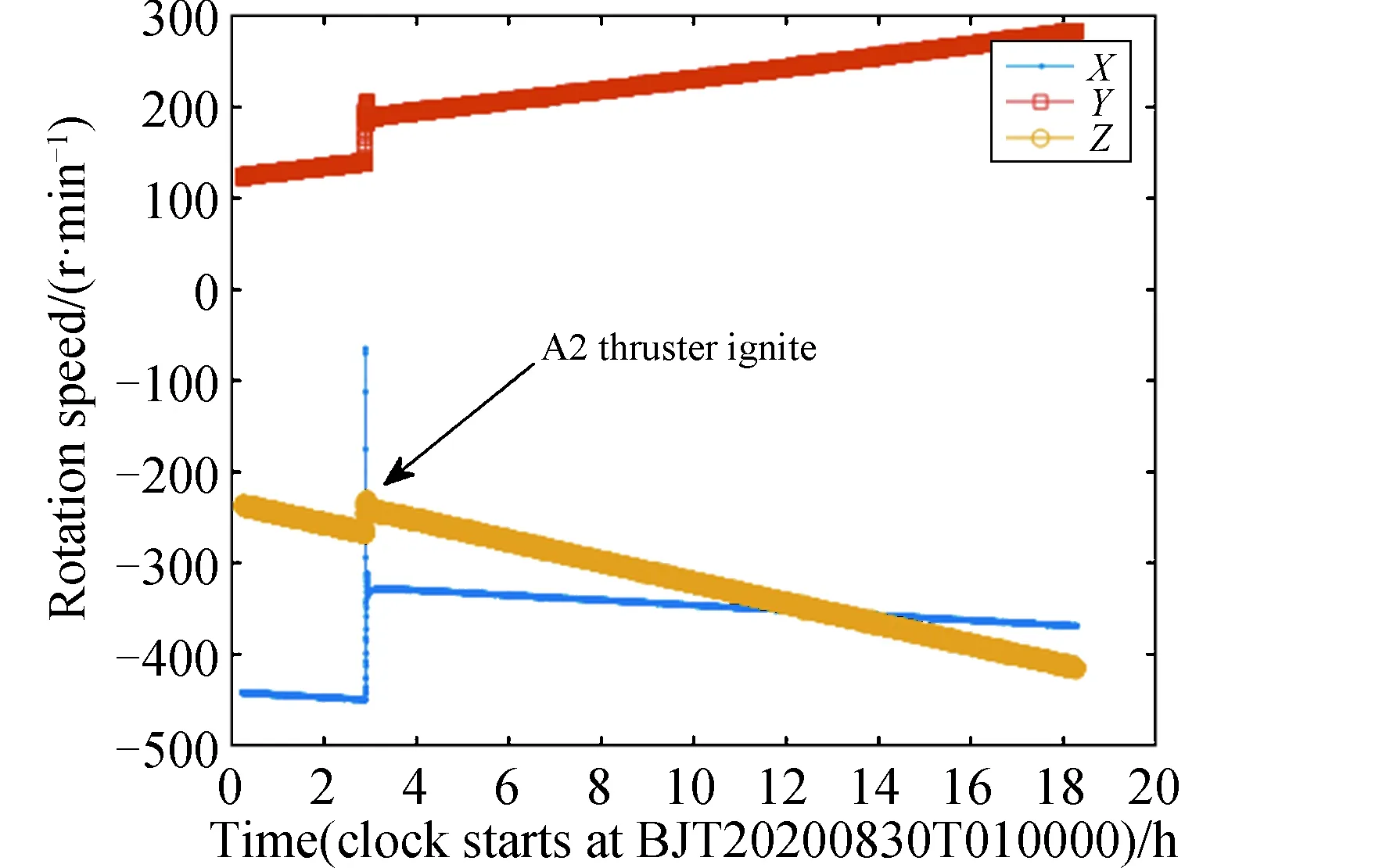
圖2 X軸(A2推力器)噴氣前后飛輪轉速變化Fig.2 Flywheel rotation changes of X axial before and after ignition (A2 thruster)
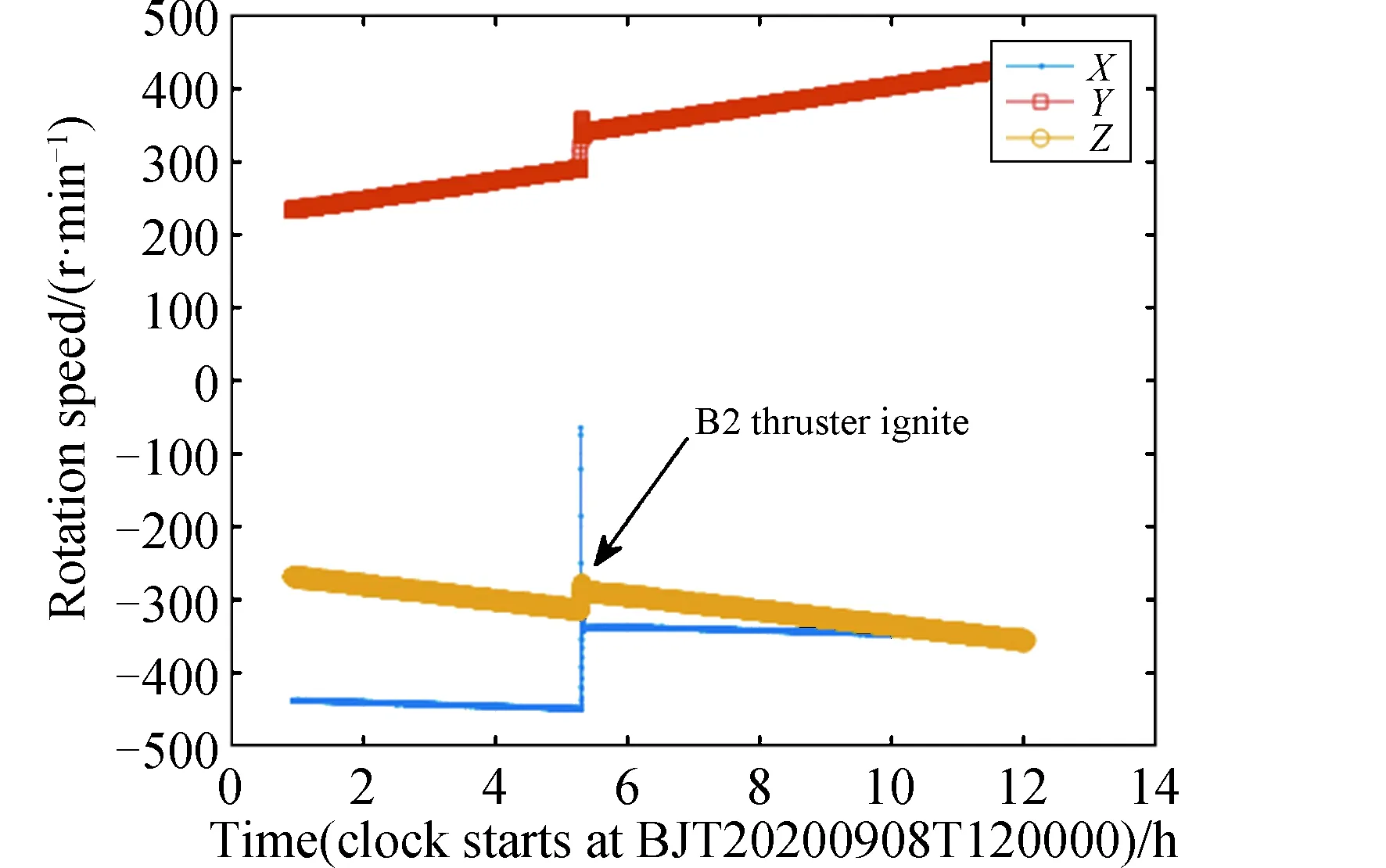
圖3 X軸(B2推力器)噴氣前后飛輪轉速變化Fig.3 Flywheel rotation changes of X axial before and after ignition (B2 thruster)
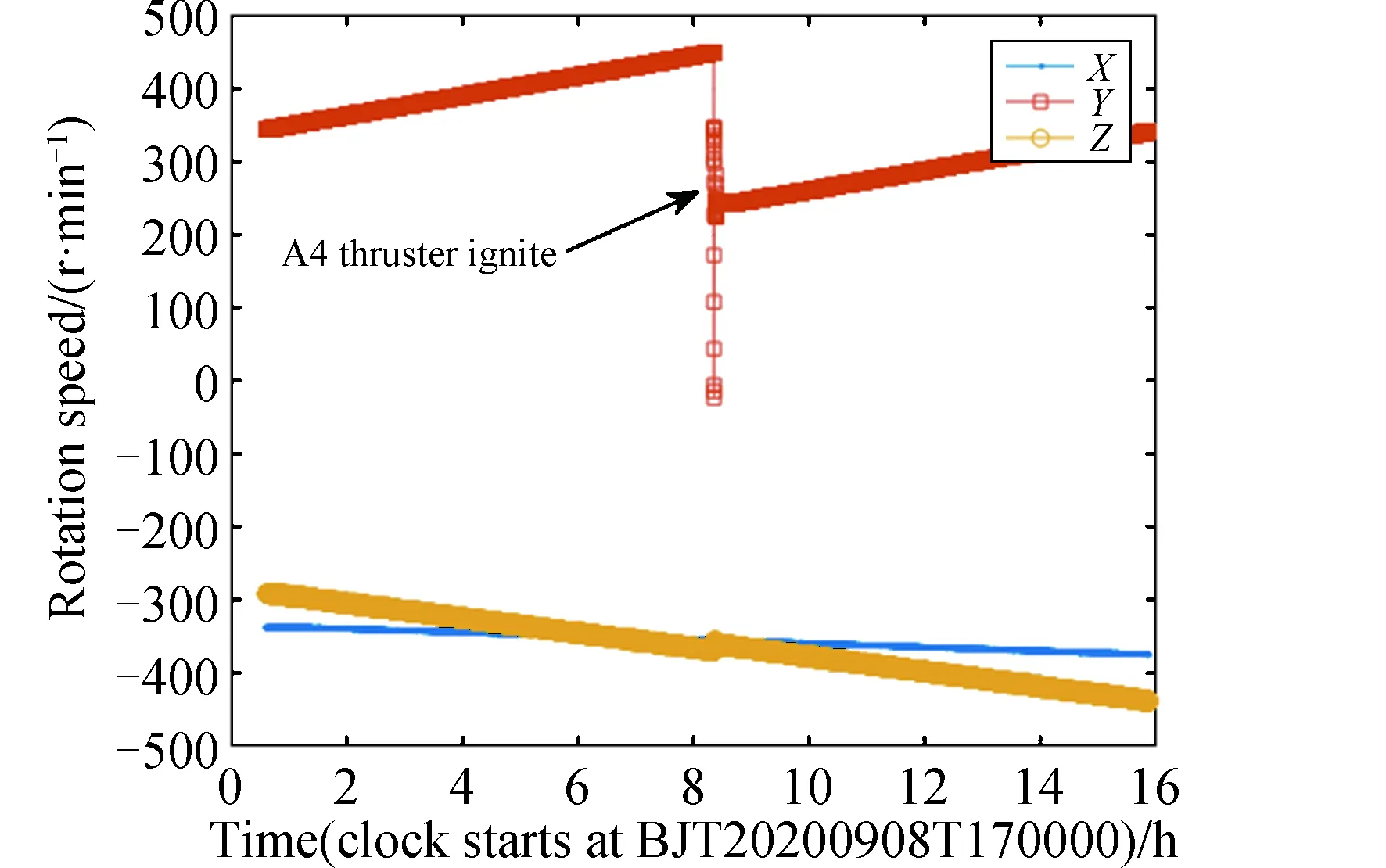
圖4 Y軸(A4推力器)噴氣前后飛輪轉速變化Fig.4 Flywheel rotation changes of Y axial before and after ignition (A4 thruster)
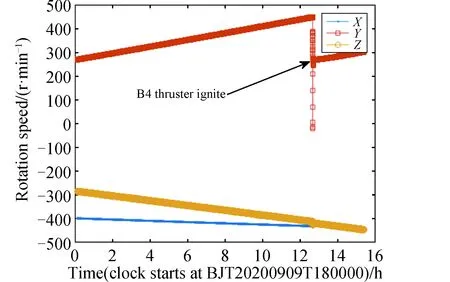
圖5 Y軸(B4推力器)噴氣前后飛輪轉速變化Fig.5 Flywheel rotation changes of Y axial before and after ignition (B4 thruster)
根據每次推力器噴氣前后的飛輪轉速變化,利用式(2)計算噴氣產生的角動量,同時需扣除空間干擾力矩的影響。由于火星探測器在巡航段僅受光壓力矩這一種空間力矩影響,在數天時間內光壓力矩可認為是常值,因此可用一段時間的飛輪轉速曲線線性擬合得到,即式(2)中的Te,結果見表2中空間力矩這一項。
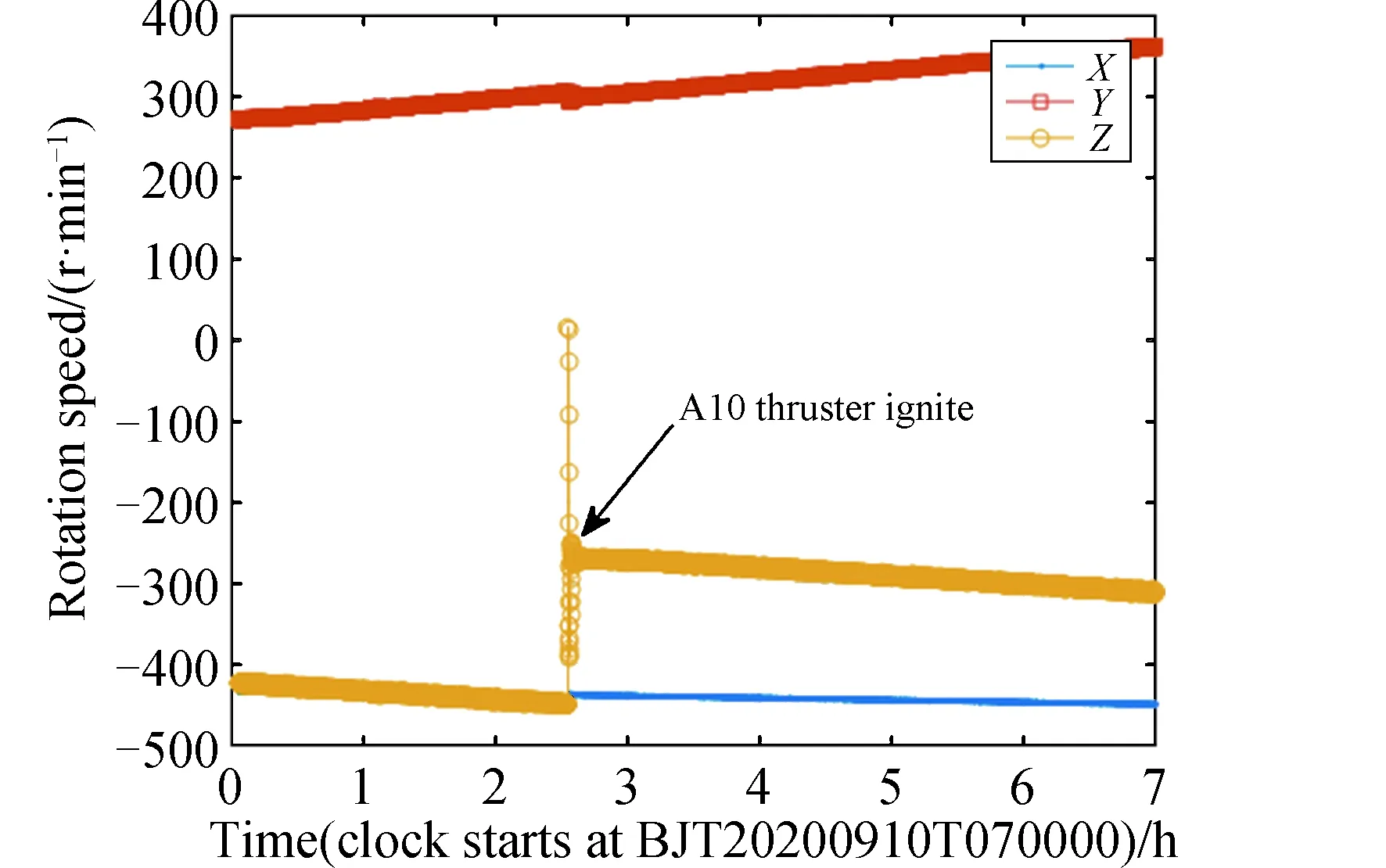
圖6 Z軸(A10推力器)噴氣前后飛輪轉速變化Fig.6 Flywheel rotation changes of Z axial before and after ignition (A10 thruster)

圖7 Z軸(B10推力器)噴氣前后飛輪轉速變化Fig.7 Flywheel rotation changes of Z axial before and after ignition (B10 thruster)
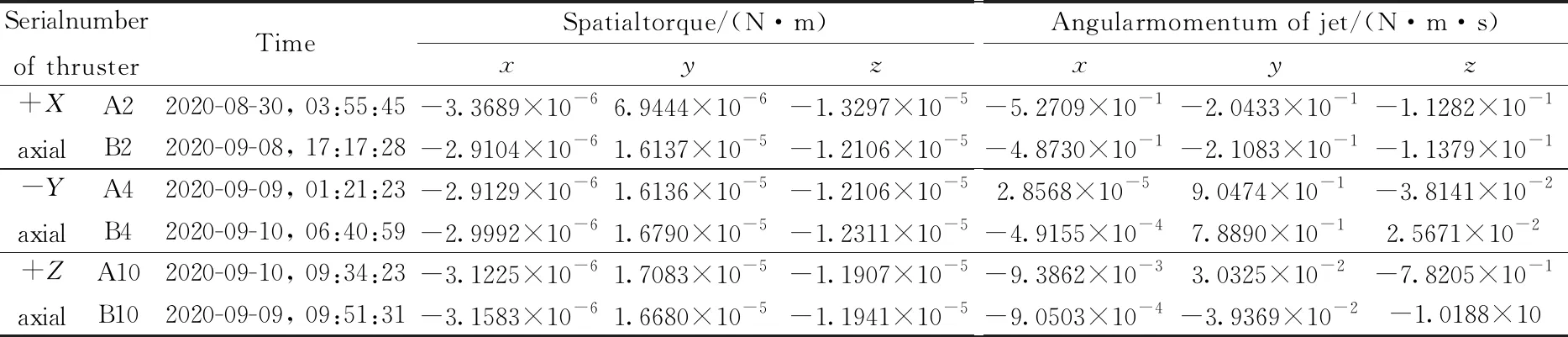
表2 噴氣卸載前后干擾力矩計算結果
從上表看出,不同時段空間力矩有一定差異。在排除空間力矩影響后,每次噴氣卸載引起的整器角動量變化也有較大不同,即使同一組推力器的兩個分支,由于推力作用點,產生的角動量方向有一定區別。
根據式(5),僅有質心r0和推力矢量Fp未知(包括推力大小|F0|、推力橫向角度偏差θ、推力縱向角度偏差φ三個參數),利用6次噴氣卸載數據得到18個等式,而由于質心參數相同,待求解參數只有15個,最小二乘違逆求解推力器和質心偏差方向,結果如表3、表4所示。
對比任務指標,各推力器偏斜量均小于0.6°的任務指標,滿足指標需求。
和理論質心位置相比,由于燃料裝填量因素不可控,以及器上電纜等附件質量難以精確計算,質心在X軸上有一定偏差,其余兩軸質心得到較好的控制。
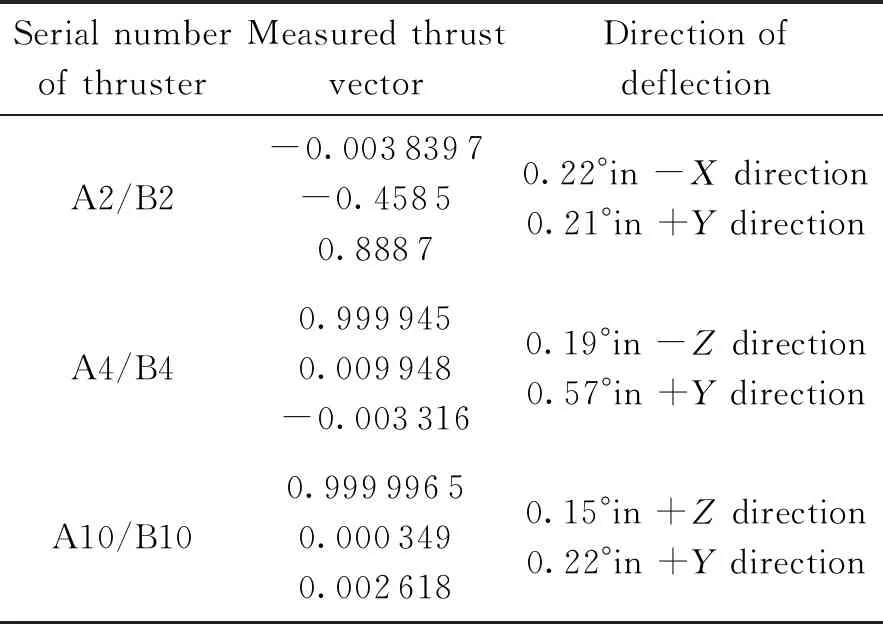
表3 推力器偏斜量計算結果
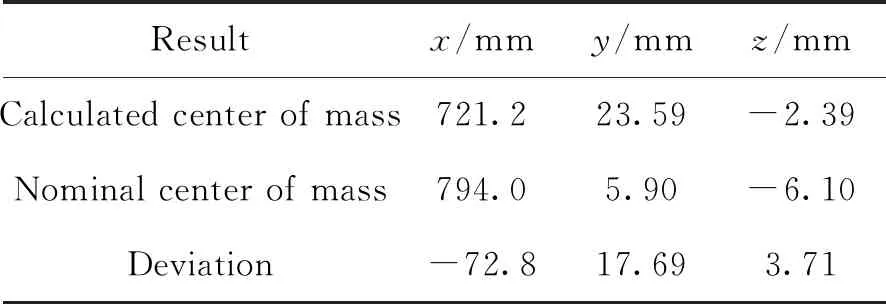
表4 質心偏差計算結果
5 結論
1)本文針對深空探測器飛行距離遠、無法通過測定軌精確標定推力器參數的難點,利用探測器飛行過程中空間干擾力矩穩定的特點,提出了一種利用噴氣卸載前后飛輪轉速變化辨識整器質心和卸載推力器推力矢量的方案。和已有方法相比,脫離了額外的器上單機、地面測定軌的約束,任務面影響小。
2)在使用天問一號火星探測器的遙測數據進行推進系統參數辨識的過程中,由于A4、B4、A10、B10推力器方向與X軸平行,質心解析產生一定耦合,YZ軸質心具有較高的辨識精度,X軸質心辨識精度稍差。若要進一步提高精度,需在各軸上均進行噴氣,在6個姿態維度上進行解析。
3)質心估計和推力器方向偏斜辨識可為后續軌控任務的點火方向制定、燃料預算提供輸入依據,提高軌控精度,降低軌控風險。
4)后續主要針對推力軸與質心測量軸耦合問題、復雜空間干擾力矩影響問題開發解耦的辨識方法,進一步擴展本方法在航天器推進系統辨識上的應用。
