大型起重機金屬結構無人機自動巡檢技術研究
2021-12-21 07:21:28劉洋
中國設備工程 2021年23期
劉洋
(湖北特種設備檢驗檢測研究院荊州分院,湖北 荊州 434000)
就目前的情況來看,我國在檢測起重機金屬結構的時候,一般就是讓有關的檢測人員攜帶著檢測的儀器爬到受力的重要結構位置上進行檢查,但是,這樣的檢測方式只能夠通過目視還有儀器的方式來對缺件、裂紋、損壞和腐蝕等問題進行檢查,但是,對盲區卻不能夠進行有效的檢查,而且這樣的檢測方式存在效率低、勞動強度大、危險作業等方面的問題。而運用無人機自動巡檢技術就可以有效地解決這些問題。因此,本文就大型起重機金屬結構無人機自動巡檢技術開展有關的研究,以此使飛行操作的安全性和穩定性得到有效的提高,進而使無人機自動巡檢作業可以更加標準化、規范化地進行。
1 大型起重機金屬結構無人機自動巡檢方法以及系統
在檢測橋梁、光伏電站還有輸電線路等領域中都對無人機自動巡檢有著一定程度的運用和研究,但是,在檢測大型起重機復雜鋼結構方面的有關研究還是比較少的。對于起重機的結構而言,主要包括工字梁、箱型梁等結構形式,并且在檢測方面還涉及三維曲面和多平面等比較復雜的檢測表面,而且對于起重機來說,大多數的時候都是處于在電磁干擾比較強,存在較多障礙物還有場景混雜的作業環境中,所以運用無人機自動巡檢技術對大型起重機的金屬結構進行有關的檢測工作還存在著比較多的難點。而針對這些存在的主要問題,在對大型起重機金屬結構進行檢測的時候,就提出了飛機打點結合航跡飛行的多旋翼無人機自動巡檢的檢測方式,并且在其中還將圖像識別技術引入進去,以此使智能化的機巡數據處理實現,進而構建了新的大型起重機自動智能巡檢作業的一種模式。在這種檢測模式下,一定要科學地規劃塔式起重機、門式起重機和門座式起重機巡檢的路徑,并且對路徑全覆蓋的規劃方式應該要進行研究,以此充分地考慮影響航跡規劃的因素。接著,依據所規劃的路徑讓有關的人員對于無人機進行操控,以此進行初步的巡檢,這個過程中對于若干航點的高度數據和經緯度等應該要進行有效的采集,然后將有關的記錄工作做好。在巡檢的過程中,可以依據航跡對飛行的速度進行控制,一旦發現有缺陷存在時,要對其進行有效的記錄拍攝,這樣在下次飛行的時候,就可以依據所記錄的缺陷點的位置和起飛點的位置來生成新的飛行航跡,然后讓無人機自動的飛行到有缺陷的位置處來對其進一步的進行甄別還有拍攝。
2 在大型起重機金屬結構無人機自動巡檢中存在的關鍵技術
2.1 規劃多旋翼無人機巡檢路徑的方式
就大型起重機的金屬結構來說,主要是通過螺栓連接、焊接、銷軸連接還有鉚接等連接的方式組成的,對于大型起重機的結構來說,主要有工字梁還有箱形梁等結構形式。在運用無人機自動巡檢技術來對這些金屬結構進行巡檢的時候,其無人機自動巡檢的主要路徑就是使用牛耕式全覆蓋的巡檢路徑。其巡檢的路徑如圖1所示,就圖1我們可以明顯地看出來,其相機拍攝的方向其實就是圖中表示出的截面箭頭。對于結構來說,無人機結構尺寸的3倍以上其實就是安全距離,換句話說,假如其旋翼展開后的軸距是1m,那么與結構之間的安全距離至少應該是3m。對于電池的能耗以及規避逆光代價來說,其實就是在牛耕式巡檢路徑前提下的最小函數目標,所以在對路徑進行優化和規劃時,就可以使用改進A*混合算法以及改進蟻群算法來進行,具體來說,主要的步驟流程分為以下五點:
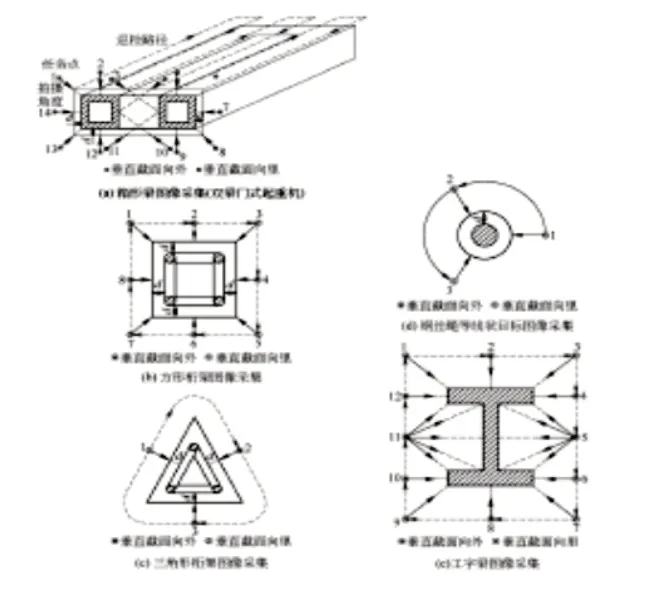
圖1 大型起重機金屬結構無人機牛耕式巡檢的路徑圖
(1)在巡檢的過程中,對于規避光代價還有電池能耗的最小函數目標一定要建立好,這樣才能夠使得無人機自動巡檢的低能耗性以及安全性得到有效的保障。(2)為了可以更好地將巡航能耗和懸停能耗確定下來,那么對于會干擾到多旋翼無人機巡檢電池能耗的主要影響因素應該要進行深入的分析。(3)對于多旋翼無人機巡檢的航跡以及和太陽光照之間的關系應該要進行有效的確定。(4)在建立三維模型的時候,要按照結構的設計尺寸對等待進行檢測的位置建模,然后將巡航過程中所有的視點坐標輸進去。(5)為了得到最優的航跡,就可以使用改進蟻群算法還有改進A*混合算法來進行,這樣就可以得到最佳的輸出航跡。
2.2 無人機自動巡檢及精密定位方法
就大型起重機的金屬結構而言,對其為了能夠實現自動的檢測,那么就要不斷地提升無人機的定位性能。而對于信號的質量而言,為了可以使其有效地提高,所以在進行定位的時候就運用了GPS+Glonasss雙系統融合的精密單點定位方式,并且可以發現其衛星數得到明顯的增加。與此同時,對于這樣系統融合的方式來說,對其進行有效的運用可以將單系統定位性能在高度角加大時而造成性能迅速變差的缺點有效地克服,這樣就可以讓定位導航的穩定性以及精度有效地提高。而就嚴重遮擋信號的區域而言,就可以運用主副無人機協同定位的方式來開展自動巡檢作業,這樣的方式可以使得檢驗無人機的定位精度得到有效的提高。對于副無人機的路徑規劃來說,在雙機協同定位檢測中是十分重要的,所以在設計巡檢路徑的時候,就可以依據主無人機的巡檢路徑來進行,一般來說,為了避免主副兩架無人機在飛行的過程中發生碰撞,主無人機飛行的高度應該要低于副無人機。
2.3 在多傳感器基礎上的無人機自主避障技術
就現階段的大型起重機而言,其金屬結構和形狀等都具備復雜的特征,并且在起重機作業的現場人物機的作業比較混亂,而且還存在著具有比較多動態障礙物的問題。而在多傳感器當中,將超聲、視覺和紅外等融合其中,以此建立無人機定位和建圖的方式,進而使得無人機的環境感知能力得到有效的提高。
在無人機自動巡檢作業的過程中,可以和設備之間設置一段安全距離,這樣在無人機自動懸停的時候可以有效地避免碰撞和墜落等事故的發生,進而使無人機檢測作業的安全性得到有效的提升。與此同時,對于無人機懸停多方面拍攝的待檢測部位圖像,在無人機自動巡檢的時候也可以進行控制,并且設置好安全距離,這樣一旦超出安全距離的時候就可以自動地進行報警,以此使飛行操作的安全性和穩定性得到有效的提升。
3 結語
綜上所述,就現階段我國的大型起重機金屬結構的檢測而言,在運用無人機自動巡檢的方式時還存在著一定困難,而與人工智能圖像識別等技術結合,就可以有效自動地評估、檢測、量化、識別出其金屬結構中存在的缺陷,并且還可以將無人機自動巡檢作業的新模式建立起來,這樣就可以有效地檢測出那些人工不能夠檢測或者是不能夠達到的位置,以此可以使事故發生的概率得到有效的控制和預防,進而使設備和人員的生命財產損失有效地減少,有效地推動企業的健康發展以及安全生產。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
