節能賽車全路段滑行車速預測*
2021-12-22 12:04:22吳展騫吳闖趙治國
汽車技術 2021年12期
關鍵詞:模型
吳展騫 吳闖 趙治國
(同濟大學,上海 201804)
主題詞:節能車 降速模型 反向傳播神經網絡
1 前言
Z182原型車是面向殼牌環保馬拉松與本田中國節能競技大賽研發的比賽車型,其目標是在比賽規則允許的范圍內,實現最低的燃油消耗量。速度分配策略對原型車燃油消耗量有較大的影響,Z182 原型車采取在17 km/h時點火加速,在37 km/h時怠速滑行交替的行駛策略。
國內外節能車隊多從車輛的結構方面著手降低燃油消耗量,通過建立車輛降速模型預測加速點輔助駕駛的相關研究較少。王雪等[1]針對純電動節能車提出一種行車策略及動力匹配方法,但其從電機、電池特性角度分析問題,對燃油車參考價值有限;姜長文等[2]通過采集車載全球定位系統(Global Positioning System,GPS)數據,基于反向傳播(Back Propagation,BP)神經網絡建立了節能車彎道降速模型,但該方法僅適用于彎道工況。在傳統乘用車領域:Li 等[3]基于BP 神經網絡和長短期記憶(Long Short-Term Memory,LSTM)算法建立了長程車速預測模型,但該方法實時性較差;Yan等[4]基于深度學習提出了一種車速預測方法,但該方法僅在城市道路低速工況下有較高的準確率,缺少對于內部道路的驗證。因此,針對節能車全路段滑行降速特性的研究較為缺乏,研究節能車全路段滑行降速特性,預測加速點位置并提醒車手,對提高比賽成績有重要意義。
本文以同濟大學志遠車隊Z182 原型車為研究對象,建立車輛模型和Z182車型全路段BP神經網絡降速預測模型,并應用于車手加速提醒系統,以達到減少燃油消耗量的目的。
2 節能賽車建模與CarSim仿真
2.1 節能賽車建模
車輛是一個多自由度的“質量-剛度-阻尼”系統[5],對原型車建模時,應在保證模型準確性的同時忽略對目標影響較小的因素。本文針對Z182原型車的特點及所需求解的目標參數,進行了如下假設[6]:
a.Z182 原型車采用點火加速后斷油滑行循環的策略,動力總成工作時間在車輛工作總時間中遠占比小于1%,且本文主要分析賽車斷油滑行時的動力特性,因此建模時將動力總成簡化為一個剛體,并集中質量于底盤。
b.Z182原型車車輪與車架采用剛性連接,因此建模時忽略懸架的影響,不考慮輪胎彈性特性。
c.將Z182 原型車車殼、車架、動力總成、轉向系統、車手均視為質量分布均勻的剛體。
Z182車型的基本外形尺寸和主要部件質量分別如表1、表2所示,各主要部件分布情況如圖1所示。為便于計算,將車手簡化為質量55 kg的圓柱體。
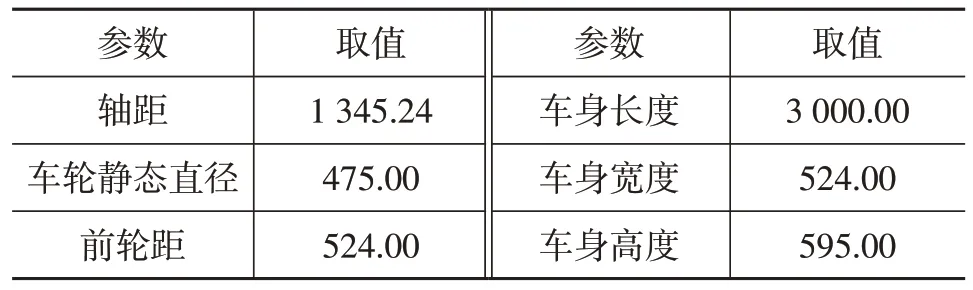
表1 Z182原型車基本外形尺寸 mm
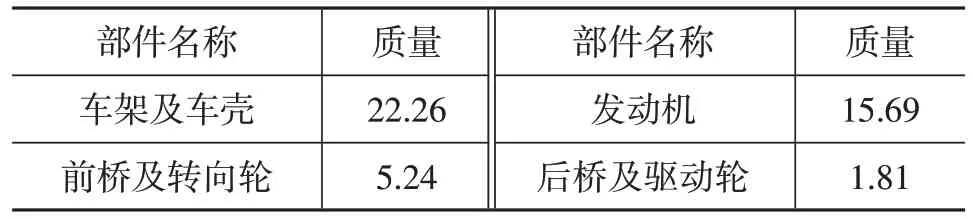
表2 Z182原型車主要部件質量 kg

圖1 Z182主要部件分布示意
Z182原型車的轉動慣量如表3所示,空氣動力學參數設置如表4所示,其中車輛坐標系原點位于車輛縱向對稱面與前軸左右輪心連線的交點在地面的投影點處,X軸為車輛前進方向,向前為正,Z軸為鉛錘(垂直)方向,向上為正,Y軸由右手螺旋原則確定。
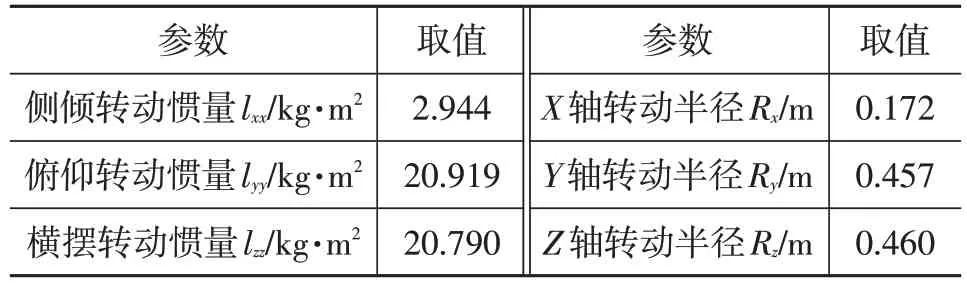
表3 Z182原型車轉動慣量及相關參數
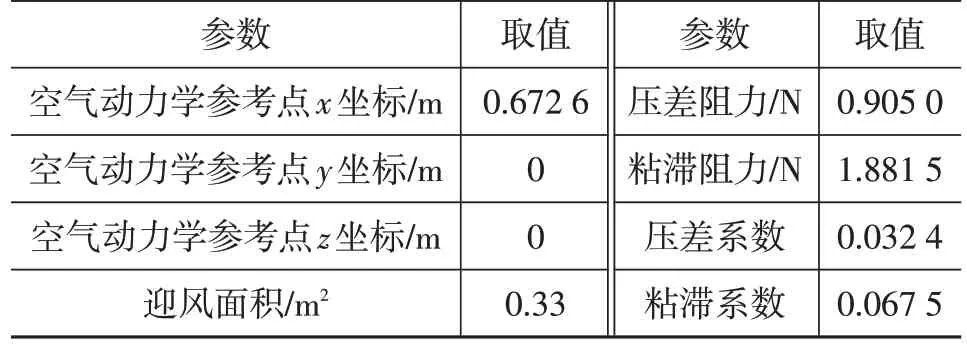
表4 Z182原型車空氣動力學參數
Z182原型車輪胎特性設置如表5所示。

表5 Z182原型車輪胎特性參數
2.2 節能賽車降速特性仿真
仿真條件設置為:選擇標準柏油路面,氣溫為25 ℃,路面附著系數為0.85,初始車速為37 km/h,空擋滑行,終點速度為17 km/h。選取直道和曲率半徑30~70 m的彎道進行仿真。
通過CarSim 仿真采集數據點,繪得Z182 原型車不同工況下的降速曲線如圖2所示。
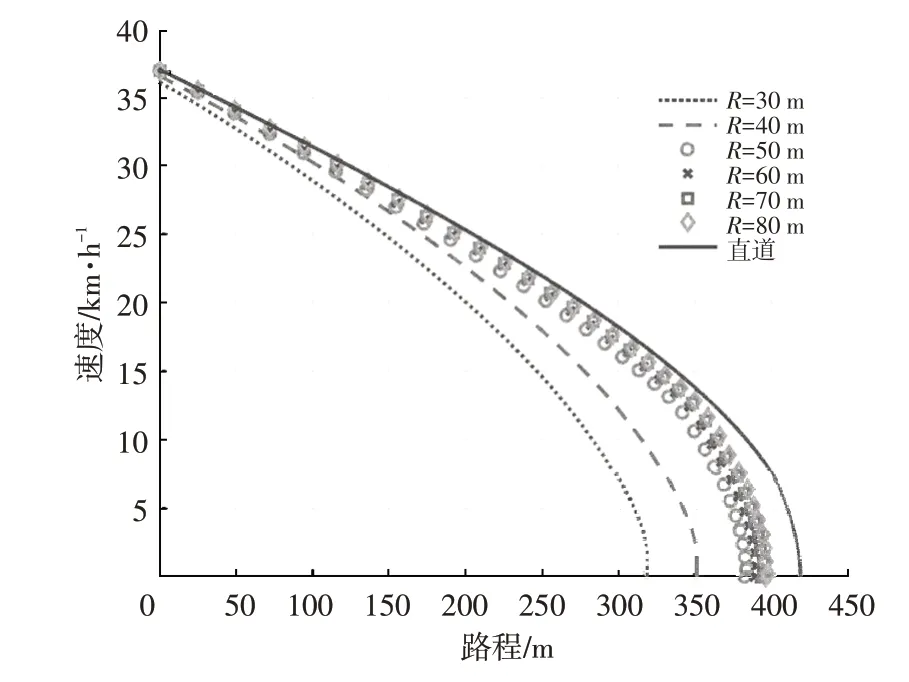
圖2 Z182原型車多工況仿真降速特性曲線
由圖2 可知,道路曲率半徑越小,影響節能車速度下降的非線性因素影響越顯著,因此本文選取實車試驗數據中道路曲率半徑最小的一組數據與仿真結果進行對比。道路曲率半徑R=50 m時模型仿真結果與實車在相同條件下獲取的試驗數據對比結果如圖3所示,由圖3 可知:該模型在5~37 km/h 的速度區間內同一坐標位置下與實車試驗數據誤差小于0.6 km/h,能較好地表現Z182車型速度下降的特性;在小于5 km的非線性段,由于非線性影響因素部分作用顯著,模型速度下降特性與實車速度下降特性誤差逐漸增大。本文所涉及的速度區間為17~37 km/h,在該速度區間下,該模型具有較高的準確性。
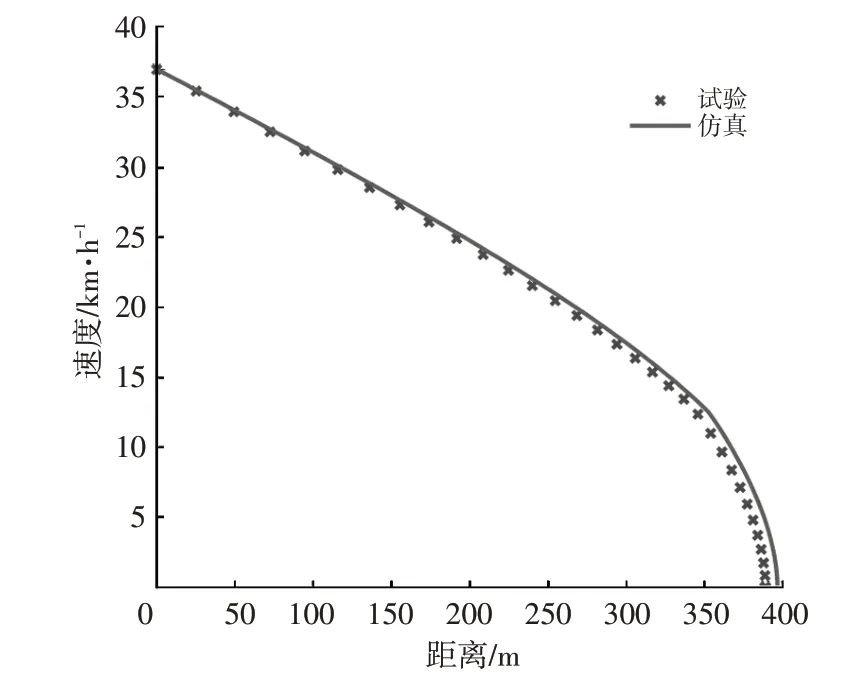
圖3 模型準確性驗證
3 基于BP神經網絡的節能車全路段降速模型
3.1 BP神經網絡搭建
由模型仿真結果可知,節能車降速過程是非線性的,受到車型、彎道曲率半徑、速度等多種因素影響,傳統的線性預測方法存在一定的局限性。BP神經網絡可以不斷利用誤差進行反向傳播,是良好的學習特征和自組織學習方法,對于特征復雜和不清晰的數據進行分類和識別具有良好效果[7],由于其良好的非線性逼近能力而得到了廣泛的應用[8]。因此,本文選用BP神經網絡預測節能車降速過程。
n輸入的人工神經元模型如圖4 所示,主要包括連接權值、求和單元及激活函數3 個部分[9]。其中x1~xn為神經元i的n個輸入變量,為對系統模型有關鍵影響的自變量,ωi1~ωin為神經元i的n個連接權值,ui為神經元i的激活函數φ()的輸入,定義為:

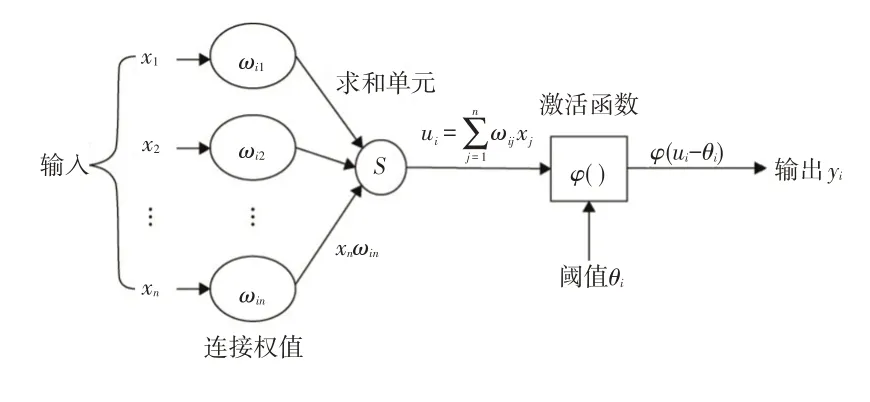
圖4 人工神經元模型
Sigmoid 由于在正半軸的函數性質與常規的神經元模型LIF 模型十分相似,曾一度作為深度學習的激活函數而廣泛使用[10]。故本文所選激活函數φ()采用Sigmoid函數:

神經元i的輸出yi定義為:

式中,θi為神經元i的閾值。
將單一神經元通過圖5 所示的方式連接構成本文所使用的BP神經網絡,其中輸入層神經元數量為4個,隱含層神經元數量為10個,輸出層神經元數量為1個。
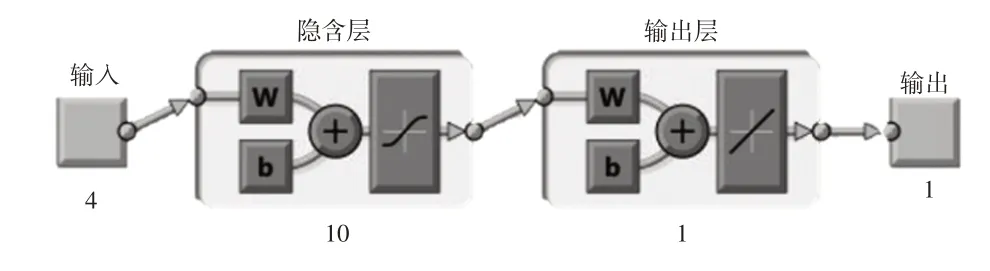
圖5 BP神經網絡結構
節能車在無坡度無風環境下直道滑行時的阻力F為:

節能車在無坡度無風環境下直道滑行時的加速度a為:

而在轉彎行駛時,車輛的滾動阻力接近直線行駛的150%~200%[11]。
因此,影響節能車降速特性的主要因素有車輛自身特性、車輛行駛速度及道路曲率半徑。為了預測節能車在特定路段的速度下降特性,選取車型序號、初始速度v、道路曲率半徑p與預測段道路長度s的CarSim仿真數據作為輸入,其中車型序號用以表征車輛自身特性,仿真輸出為節能車在預測路段末端的速度。
為解決輸入數據集變量單位數量級不統一的問題,引入歸一化函數將數據樣本映射到0~1的區間內:

式中,y(x)為離差化標準值;xmin、xmax分別為該變量最小值和最大值。
隱含層節點數量q為[10]:

式中,L為輸入層神經元數量;M為輸出層神經元數量;C為1~10范圍內的常數。
由式(7)可知,q的取值范圍為5~14。通過選取不同的隱含層節點數量q訓練模型,通過驗證得出q=10個時模型具有最小誤差,故該模型最佳隱含層神經元數量為11個。
本文利用MATLAB BP 神經網絡工具箱搭建BP 神經網絡模型,采用Levenberg-Marquardt法對模型進行訓練。訓練集、測試集、驗證集比例為70%、15%、15%,其中訓練集、測試集為2.2節中的數據集,驗證集為實車數據。
3.2 BP神經網絡訓練
該BP 神經網絡的訓練過程曲線如圖6 所示,該BP神經網絡最小均方差出現在第136次,其最優均方差為0.005 829 7,符合預期指標,故依據該組迭代結果,獲得最終的BP神經網絡。
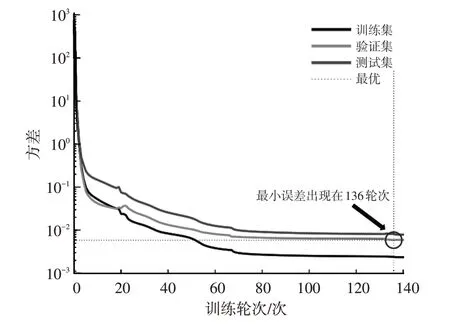
圖6 BP學習過程曲線
本文使用決定系數R2作為預測結果準確度的衡量標準:
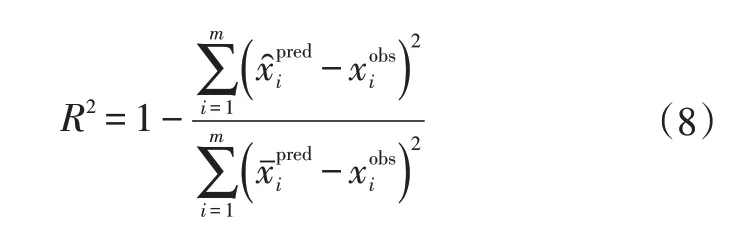
式中,m為測試集樣本數量;xipred為末端速度預測值;xiobs為實際末端速度。
圖7 所示分別為訓練集、驗證集、測試集和全部數據集擬合值與試驗值的線性回歸比較結果,通過驗證,該網絡R2>0.999,擬合效果良好,能夠充分反映Z182原型車在不同條件下的降速特性。
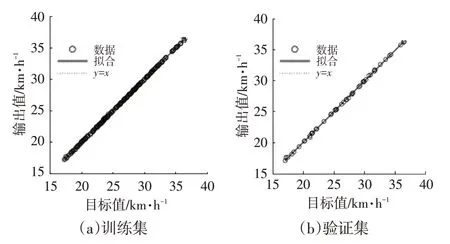
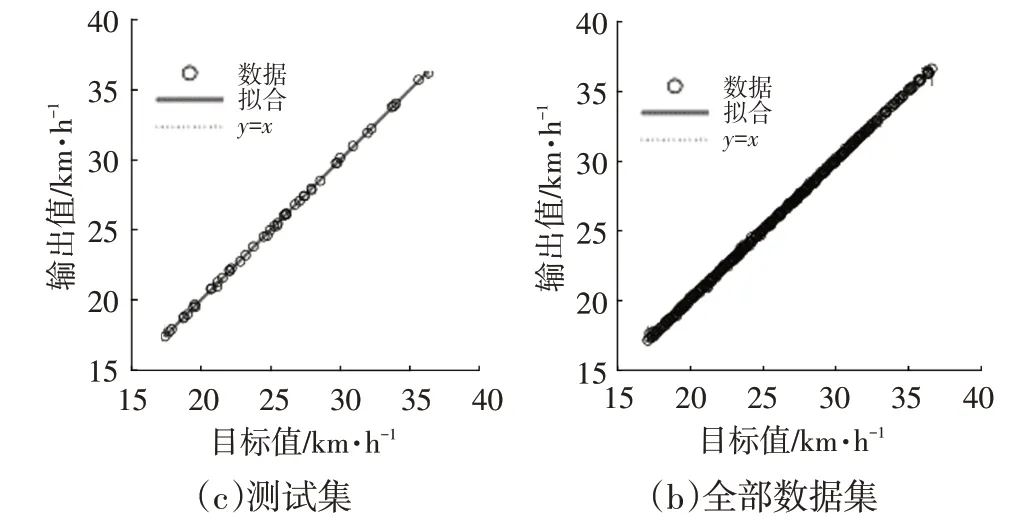
圖7 擬合值與真實值線性回歸比較
3.3 BP神經網絡驗證
為進一步檢驗該網絡的實用性,本文使用Z182 原型車在北京京港國際賽車場和同濟大學試車場分別進行4組降速測試。試驗車輛行駛路徑如圖8所示,所選取的行駛工況能夠覆蓋節能車行駛的全部工況。
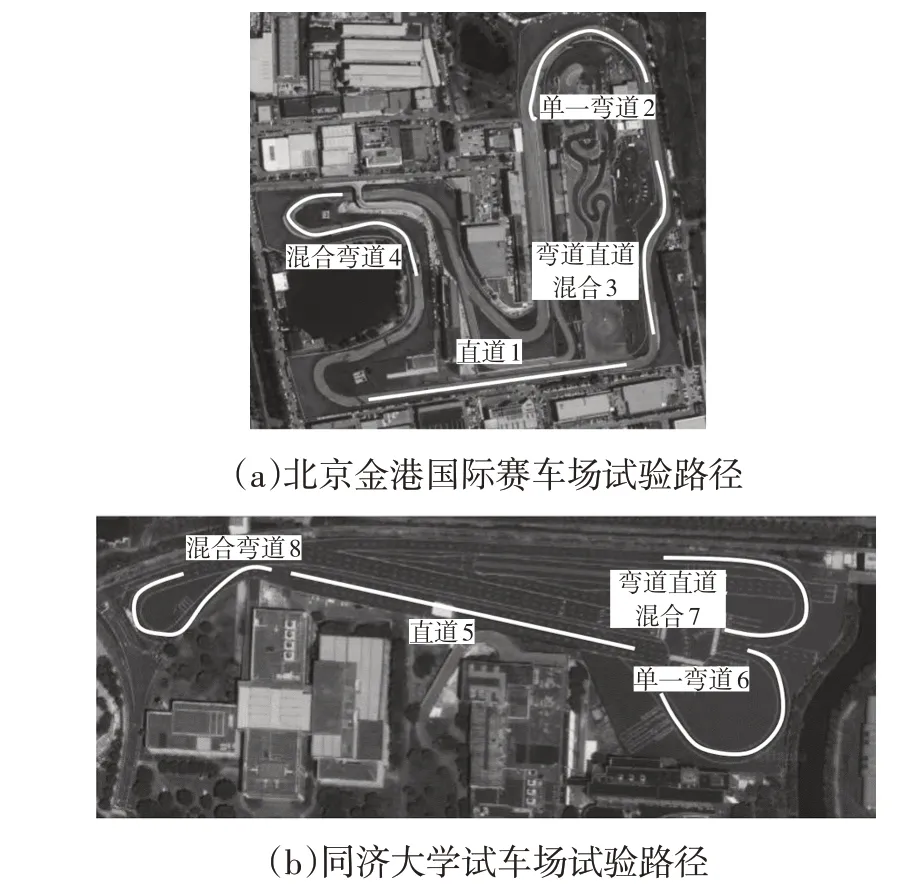
圖8 神經網絡驗證試驗路徑
圖9 示分別為賽車通過某一特定區間路段的尾速的實車數據和在該區間終點前25 m 處使用BP 神經網絡預測的賽車通過該特定區間路段的尾速。從圖9 中可以得出,該BP 網絡對車輛在特定區間路段下的尾速預測結果誤差均小于0.3 km/h,能夠較為準確地反映節能賽車速度下降特性。
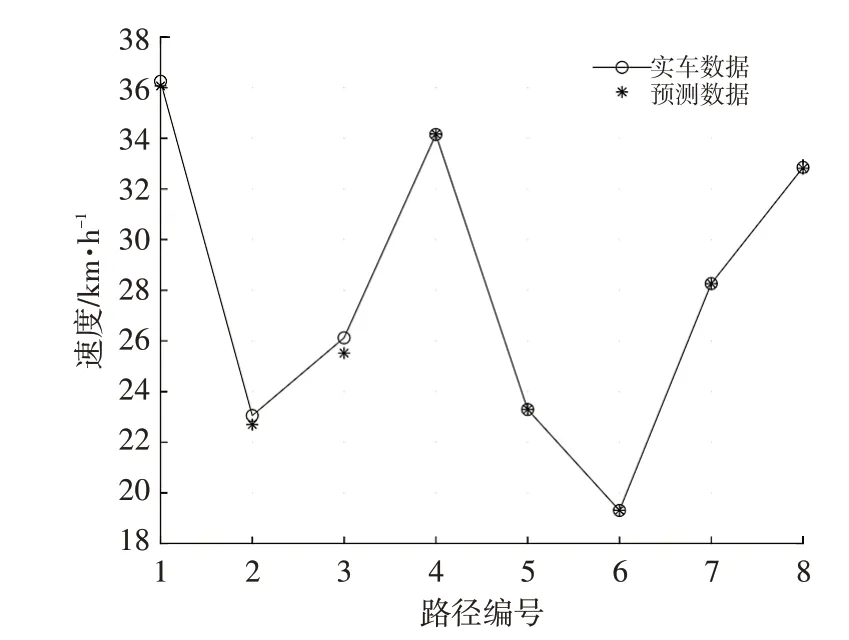
圖9 BP神經網絡驗證
4 試驗與結果分析
基于上述研究,為了進一步驗證全路段BP 神經網絡降速預測模型的有效性,在Z182 車型上進行試驗。與傳統節能車相比,該車加裝了霍爾輪速傳感器、GPS傳感器和用于與電腦上位機通訊的433 MHz 無線發射模塊。試驗車輛如圖10所示。

圖10 試驗車輛
在試驗過程中,首先建立道路GPS 坐標地圖,由霍爾輪速傳感器、GPS 傳感器采集車輛位置和速度信息,通過433 MHz 無線發射模塊與MATLAB 進行通訊,BP神經網絡根據回傳的信息解算出加速點與當前位置的距離,將該預測結果與車速實際降低到最優加速值(17 km/h)的位置進行對比,驗證其準確性。
實車試驗地點為同濟大學試車場,車輛行駛路徑包含圖8b 中的路徑,覆蓋節能車行駛的全部工況。上位機反饋結果如圖11所示。
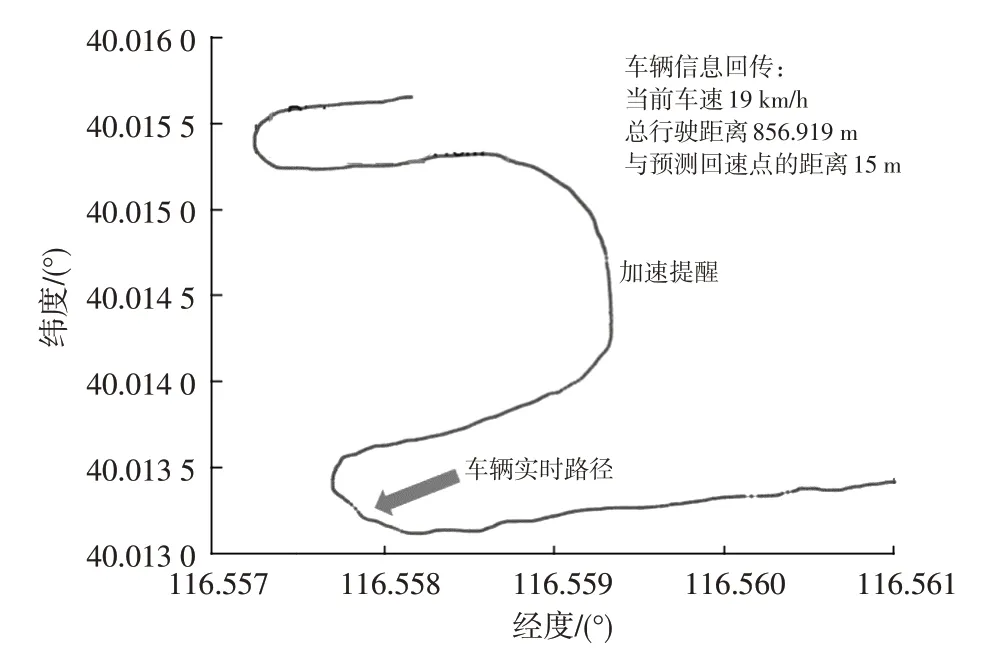
圖11 MATLAB上位機反饋界面
在試驗中,當車速降至25 km/h時,開始采集車輛參數并發送至上位機解算。試驗結果如表6所示,準確度用誤差率(預測誤差距離與單次滑行總距離的比值)表征。在本文試驗條件下,該模型能夠平均提前5.15 s預測加速點位置,單次平均誤差率小于0.1%,具有較好的實用價值。
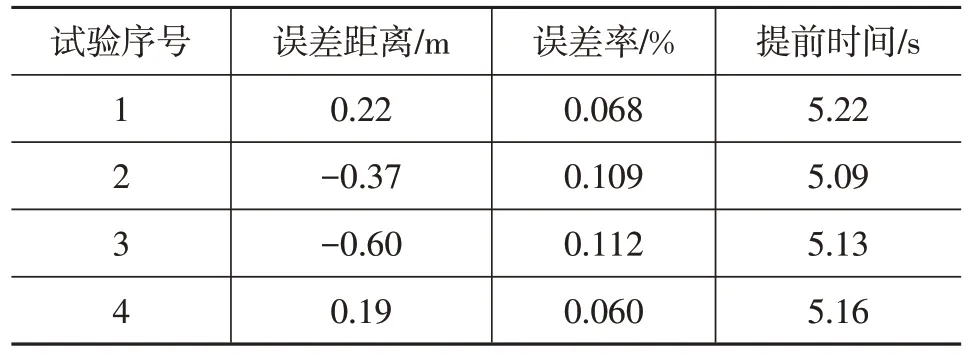
表6 BP神經網絡預測試驗結果
通過將該模型引入車載系統,在車速降至25 km/h時,開始采集車輛參數并發送至上位機解算,并通過聲音頻率的高低表征車輛與理論最優加速點的距離,提醒車手及時采取操作。該系統的作用以誤操作次數表征,誤操作指車手加速位置與理論最優加速點偏差大于±5 m。如表7所示,使用該系統后,平均減少4.07%的燃油消耗量。
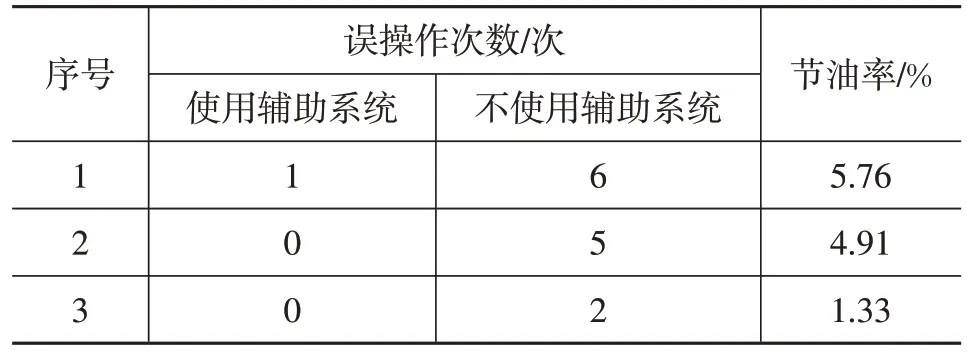
表7 輔助系統使用前后成績對比
5 結束語
本文基于BP 神經網絡構建了Z182 節能車全路段降速模型,可實現對節能車加速位置的預測。自主搭建了試驗平臺,通過實車試驗,該模型平均能夠提前5.15 s預測加速點位置,單次平均誤差率小于0.1%,通過引入該模型,結合相應的車載輔助設備,單次試車平均能減少4.07%的燃油消耗量。
試驗結果表明,該模型能夠準確預測節能車加速位置,同時,本文為研究節能車比賽速度分配提供了一種新的思路,但是本文僅將其用于輔助車手操作,后續可將其應用于車輛控制系統,實現車輛最優速度分配的自動控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
