基于模糊控制的節水智能灌溉系統設計
2021-12-22 15:24:17劉振奎
安徽農學通報 2021年23期
劉振奎






摘 要:中國是農業大國,在由農業大國向農業強國轉變的道路上,農業灌溉用水量是迫切需要解決的問題。由于土壤含水率是一個復雜的非線性的變化過程且灌溉系統難以建立一個精確的數學模型,因而設計了基于模糊控制的節水智能灌溉系統。該系統以土壤水分誤差和誤差變化率作為輸入量,灌溉時間為輸出量,模糊規則以專家經驗為基礎設置,最后通過Matlab仿真驗證,表明該系統可以有效地實現節水智能灌溉的功能。
關鍵詞:農業灌溉;模糊控制;節水智能;Matlab仿真
中圖分類號 S277 文獻標識碼 A 文章編號 1007-7731(2021)23-0143-03
Design of Water-saving Intelligent Irrigation System Based on Fuzzy Control
LIU Zhenkui
(College of Electrical Engineering, Dalian Jiaotong University, Dalian 116028, China)
Abstract: As China is a large agricultural country, water consumption for agricultural irrigation is an urgent problem to be solved on the road of transforming into a powerful agricultural country. Because the soil moisture content is a complex nonlinear change process and it is difficult to establish an accurate mathematical model for the irrigation system, a water-saving intelligent irrigation system based on fuzzy control is designed. The system is based on soil moisture error and error rate of change as input, irrigation time as output, fuzzy rules set on the basis of expert experience, and finally through Matlab simulation verification, shows that the system can effectively achieve the function of water-saving intelligent irrigation.
Key words: Agricultural irrigation; Fuzzy control; Water-saving intelligence; The Matlab simulation
近三十年來,我國農業生產一直占全國用水總量的主要部分。水是生命之源,隨著我國農業生產的大力發展,農業灌溉的方式越來越多元化,在由農業大國向農業強國的轉變道路上,灌溉用水量增多和水資源浪費問題是我們需要去重視和改善的。從節水的角度出發,農業用水量的焦點主要在灌溉用水的利用率這個問題上。根據水利部的統計,我國節水灌溉面積達到0.378億hm2,農業灌溉用水量約占全社會的56%左右,在保證糧食產量穩步增加的情況下,農業用水總量基本保持穩定,這都得益于節水灌溉。
目前,大多數的節水灌溉主要依靠于人工經驗來手動控制灌溉時間,還有少數一部分是半自動控制,即設置電磁閥開啟和持續時間自動運行。以上灌溉方式都比較粗糙,不能根據植物在不同生長階段的不同環境進行靈活灌溉[1]。
為此,本研究設計了一種基于模糊控制的節水智能灌溉系統,主要由以下3個部分組成,分別是有Tinker board和TFT液晶屏組成的總控端,ESP8266單片機搭配繼電器組成終端節點來控制土壤濕度測試儀,路由器OpenWrt系統組建的局域網絡。最終通過設置模糊控制器來具體控制終端節點上電磁閥打開的時間,即灌溉的時間,從而最大化地達到節水地目的。
1 系統總體設計
本設計是基于模糊控制的節水智能灌溉系統,從節水和智能的角度出發,將模糊控制和智能設備結合起來,以提高農業用水利用率,從而達到節水的目的。智能灌溉系統的結構如圖1所示。
路由器作為整個網絡的中心,實現整個系統聯網工作。路由器通過刷入OpenWrt系統,然后在路由器中綁定服務器Mac地址,這時路由器會自動分配IP地址給服務器,當然也可以通過路由器手動分配給服務器IP地址,最后通過終端節點上ESP8266單片機上的Wi-Fi模塊聯網到作為服務器的總控端,最終組建好整個系統的局域網,使系統穩定有效的執行操作命令。根據終端節點上的土壤濕度測試儀實時地能夠檢測到土壤的體積含水率,即土壤濕度。
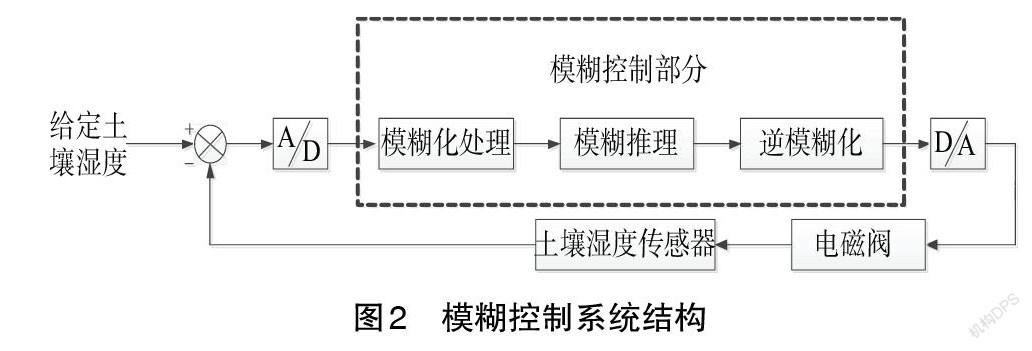
由土壤濕度傳感器測到的土壤具體濕度,實時地反饋到總控端的顯示屏上,然后采用模糊控制策略計算出作物灌溉的需水量,最終設置終端節點上電磁閥打開的時間,實現節水灌溉的目的[2]。模糊控制系統結構如圖2所示。
2 模糊控制決策設計
2.1 模糊控制理論基礎 模糊控制是以模糊集合理論和模糊推理為基礎,可類比人完成特定的控制工作。模糊控制是用于非線性控制的方法,適合于非線性時變和純滯后的系統控制[3]。在灌溉中,作物是否需要灌水主要取決于土壤濕度。本文設計的模糊控制器是根據專家對于灌溉的經驗總結并歸納出控制規則,通過計算機來實現自動控制。根據模糊推理的設計,來實時地調整灌溉的時間,且調整的是精確值,即電磁閥打開的時間。
2.2 模糊控制器
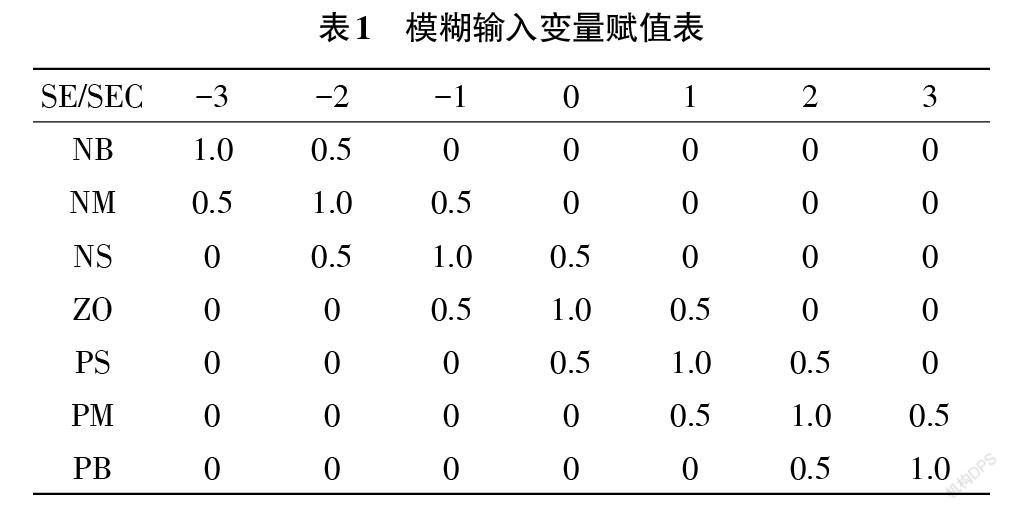
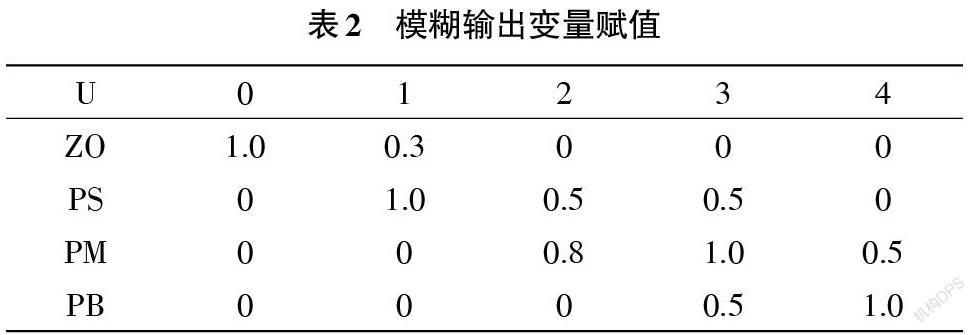
2.2.1 模糊化 模糊控制器的設計包括的部分有輸入模糊化,根據專家經驗和數據總結建立規則庫,模糊推理和逆模糊化。本設計中,設r為最適合作物生長的土壤濕度值,y為當下實際測得的土壤濕度值,則輸入為e=r-y,即土壤水分誤差。那么,土壤水分誤差變化率ec=e(i+1)/ei(i∈N,即不同時刻下記錄的e的值)。設置誤差e的基本(物理)論域為[-6%,6%],誤差變化率ec的基本論域為[-1%,1%]。設e和ec相對應的模糊變量為SE和SEC,在建立模糊集的時候并非越多越好,因為數量的增多會加大模糊推理的計算量,故3至10個為最適宜,從這個角度出發,定義SE和SEC的模糊子集各取的7個語言值,即{負大,負中,負小,零,正小,正中,正大},簡記為{NB,NM,NS,ZO,PS,PM,PB},則變量的量化(模糊)論域均為{-3,-2,-1,0,1,2,3}。模糊控制最終控制的是電磁閥打開的時間U,定義其基本論域為[0,60],模糊子集為{零,短時,中時,長時},簡記為{ZO,PS,PM,PB},量化論域為{0,1,2,3,4}。
2.2.2 模糊變量賦值 從模糊集同時滿足完備性和一致性的角度出發,將模糊輸入變量SE和SEC、模糊輸出變量U合理賦值,如表1和表2所示。
2.2.3 模糊控制規則和決策設計 本文采用的是Mamdani直接推理法,根據農業部門長期對于農業灌溉的實踐和經驗總結,可設置模糊規則如表3所示。當SE為NB或NM時,SEC無論怎樣變化都不進行灌溉,即表中為ZO。在表中間內容的ZO、PS、PM、PB指的是灌溉時間從0~60min依次增多。在實際應用中可根據具體情況合理調整模糊規則,以達到最佳的灌溉效果。
由上述模糊控制規則和隸屬度函數,可利用Matlab提供的模糊控制工具箱,構建模糊推理控制系統。采用最大隸屬度法進行逆模糊化,即可求得電磁閥打開時間的模糊控制表,如表4所示。表4所得到的是控制量的量化等級,然后在與比例因子相乘才能得到執行結果 [4]。當為1,則表示灌溉的時間為15min,2表示灌溉時間為30min,依次類推[5]。
3 模糊控制試驗仿真`
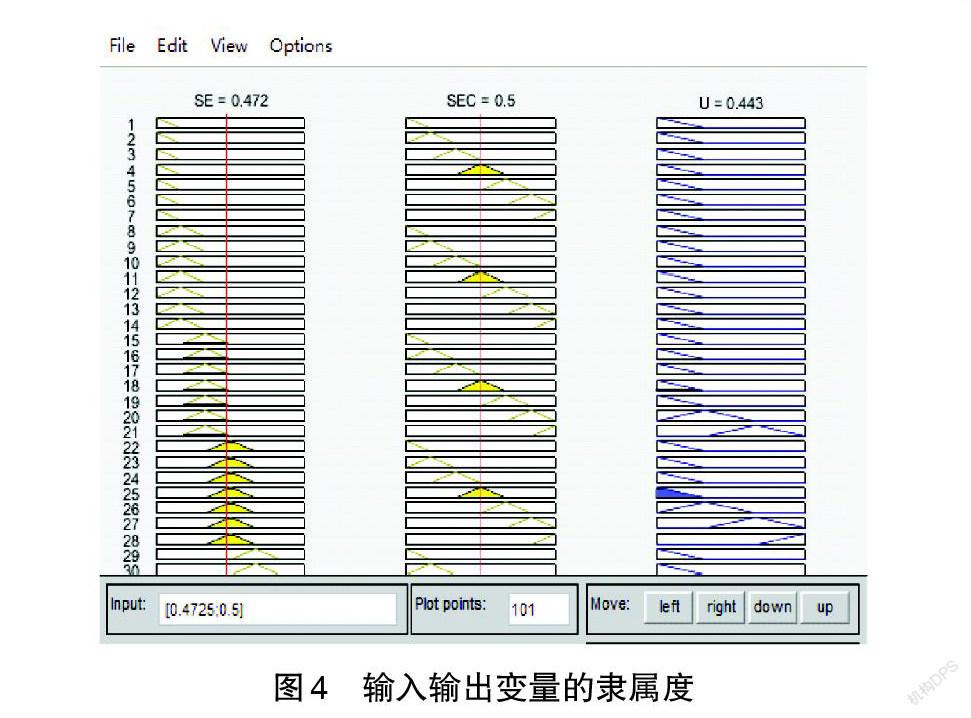
3.1 Matlab設置參數 可根據隸屬度賦值和模糊控制規則建立模糊控制系統,通過Matlab實現設置的49條模糊控制規則和Rule Viewr如圖3、圖4所示。
3.2 模糊控制Simulink仿真 為了驗證節水智能灌溉的有效性,使用Simulink工具箱對上述模糊控制建立模型,如圖5所示。模型仿真結果如圖6所示。
通過語言中模糊邏輯工具箱和模塊對節水模糊控制器進行輸入輸出變量曲面分析和模糊控制器建模和仿真,結果表明,智能節水模糊控制器超調量小、響應快、無振蕩、系統平穩性好[6]。
4 結論
基于灌溉系統具有大慣性、非線性與時滯的特點,并且土壤含水率是一個非線性且復雜的變化過程,很難對其建立準確的數學模型,采用傳統的噴灌、滴灌等很難實現有效地節水灌溉的效果,而通過模糊控制能很好地彌補該缺陷。為此,本研究設計了基于模糊控制的節水智能灌溉系統。經過驗證,該系統運行效果良好,解決了根據土壤水分適時、適量、自動灌溉的問題,并能保證土壤合適的水分,對于作物生長、發育、節約用水等都具有非常重要的意義。
參考文獻
[1]吳迪,劉天宇,宋濤,等.基于模糊控制的智能節水灌溉控制系統設計[J].江蘇農業科學,2018,46(23):245-249.
[2]李聰聰,高立艾,李云亮.基于物聯網技術和模糊控制的智能節水灌溉系統[J].節水灌溉,2013(12):83-86.
[3]梁月云,崔天時,何亞非.溫室節水灌溉系統模糊控制器設計及MATLAB仿真[J].農機化研究,2014,36(06):202-205,209.
[4]郭正琴,王一鳴,楊衛中,等.基于模糊控制的智能灌溉控制系統[J].農機化研究,2006(12):103-105,108.
[5]周李涌,高麗麗,高鷺.論模糊控制器中量化因子和比例因子的作用[J].內蒙古科技與經濟,2004(19):61-62.
[6]羅杰.基于模糊控制智能灌溉控制系統研究[D].吉林:吉林大學,2011.
(責編:張宏民)