基于擾動觀測器的時變負載四旋翼無人機自適應有限時間控制
2021-12-28 07:35:29武曉晶鄭文棪吳學禮甄然邵士凱
河北科技大學學報 2021年6期
武曉晶 鄭文棪 吳學禮 甄然 邵士凱
摘 要:針對具有未知外部擾動和阻力系數的時變負載四旋翼無人機系統,提出了一種復合有限時間控制策略。首先,通過牛頓-歐拉方法建立了完整的四旋翼無人機數學模型。位置環采用自適應參數校正方法對負載進行估計,并與反步遞推控制相結合,在阻力系數未知情況下設計了自適應軌跡跟蹤控制器。其次,采用基于擾動觀測器的有限時間滑模控制器,并利用Lyapunov穩定性理論進行無人機系統位置環和姿態環漸近穩定和有限時間穩定性驗證。最后,通過數值仿真進行驗證。結果表明,所提控制器提高了系統的收斂速度,減少了外界擾動對系統的影響。研究方法克服了已有研究要求阻力系數和負載已知的局限性,提高了系統的抗干擾能力,對于增強四旋翼無人機的實際應用性具有一定的參考價值。
關鍵詞:自動控制理論;四旋翼無人機;時變負載;擾動觀測器;反步遞推控制;滑模控制
中圖分類號:TN958.98?? 文獻標識碼:A
doi:10.7535/hbkd.2021yx06005
Adaptive finite-time control for quadrotor UAV with time-varying load based on disturbance observer
WU Xiaojing1,ZHENG Wenyan1,WU Xueli1,2,ZHEN Ran1,SHAO Shikai1
(1.School of Electrical Engineering,Hebei University of Science and Technology,shijiazhuang,Hebei 050018,China;2.Hebei Provincial Research Center for Technologies in Process Engineering Automation,Shijiazhuang,Hebei 050018,China)
Abstract:For the quadrotor unmanned aerial vehicle (UAV) system with time-varying load,the compound finite-time control strategy was proposed in the presence of unknown external disturbances and unknown drag coefficients.Firstly,a complete mathematical model of quadrotor UAV was established by Newton-Euler method .An adaptive trajectory tracking controller with unknown drag coefficient was designed by combining the adaptive parameter correction method of position loop with backstepping control to estimate load.Then,a finite-time sliding mode controller and Lyapunov stability theory were used so that the position loop and the attitude loop were proved to be asymptotically stable and finite-time stable,respectively.Finally,it was verified by numerical simulation.The results show that the proposed controller improves the system convergence rate,and reduces the influence of outside disturbance to the system.This method overcomes the limitations of known drag coefficients and load in the existing research,improves the anti-interference ability of the system,and has certain reference value for enhancing the practical application of the quadrotor UAV.
Keywords:
automatic control theory;quadrotor unmanned aerial vehicle (UAV);time-varying load;disturbance observer;backstepping control;sliding mode control
四旋翼無人機具有體積小、攜帶方便、使用簡單、價格便宜、機動性較強等特點。近年來,其應用范圍逐漸從軍事領域擴展到民用領域[1]。在工業生產線巡檢、農作物生長情況監測、實時畫面轉播、道路監管等領域被廣泛使用[2],因此,無人機的控制問題受到了廣泛關注。眾所周知,四旋翼無人機是一種典型的非線性、欠驅動、強耦合系統,又由于其質量較小、易受風擾動,給無人機在實際應用中的控制問題帶來了巨大挑戰[3]。
針對四旋翼無人機的控制問題,傳統的PID控制算法[4-5]、LQR控制算法[6-8]等線性控制方法先后被應用于無人機控制上,但是這些線性控制方法不能保證無人機系統具有較好的控制性能。隨后,反步控制、自適應控制、滑模控制等一系列非線性控制方法被相繼提出[9-13]。文獻[9]針對存在參數不確定性和外部擾動的四旋翼無人機系統,設計了基于擾動觀測器的自適應滑模控制策略。文獻[10]結合魯棒自適應反推控制方法和快速終端滑模控制方法,確保系統的穩定性和控制器的魯棒性。文獻[11]研究了一類具有未知外部復合擾動的四旋翼無人機姿態系統,提出一種新的指數式非奇異終端滑模控制,使系統獲得了較好的控制性能。為了實現存在參數不確定性的四旋翼無人機系統姿態軌跡的全局漸近跟蹤,文獻[12]提出了一種自適應滑模反推控制方案。文獻[13]針對存在外部風擾的無人機系統,設計了基于非線性擴張觀測器的滑模控制器,并通過仿真實驗,驗證了跟蹤誤差的收斂性。然而,上述研究都是針對具有固定負載的無人機進行研究,而在實際應用中,四旋翼無人機經常被用于運輸貨物和噴灑農藥等工作,負載可能是時變的。
為了解決上述問題,文獻[14—16]研究了具有時變負載的四旋翼無人機的控制方法。其中,文獻[14]為四旋翼無人機系統設計了一種自適應控制器,用來補償負載質量的不確定性。文獻[15]提出了一種基于反推法的分數滑模控制器用于具有時變負載的四旋翼無人機系統,該控制器實現了控制系統跟蹤軌跡的漸近穩定。文獻[16]基于滑模控制方法設計了一種魯棒控制方案,實現了存在時變負載的四旋翼無人機姿態跟蹤誤差的漸近穩定。
然而,上述研究所提出的控制方法都只能保證四旋翼無人機系統漸近穩定,即:系統狀態只有當時間趨近于無窮大的時候才能收斂到平衡點。實際應用中,對四旋翼無人機系統收斂的快速性提出了更高的要求,有限時間控制可以確保狀態變量在限定的時間內收斂到平衡點。因此,四旋翼無人機系統的有限時間控制研究具有非常重要的意義。文獻[17]針對四旋翼無人機姿態子系統,基于指定姿態軌跡,提出了一種基于有限時間控制的姿態跟蹤算法,但是,此系統阻力系數已知,而且沒有考慮位置子系統的控制器設計。文獻[18]針對具有未知外部擾動的四旋翼無人機系統,基于改進的Overtorque等效控制算法,提出了一種自適應多變量有限時間穩定控制算法,但是沒有考慮無人機的時變負載。文獻[19—20]基于擾動觀測器,針對四旋翼無人機設計了有限時間控制器,然而,此研究未考慮阻力系數未知和時變負載對系統的影響。
基于以上分析,本文面向具有未知外部擾動、時變負載和未知阻力系數的四旋翼無人機系統,分別針對位置環和姿態環,提出了自適應反步遞推控制方法和基于擾動觀測器的有限時間滑模控制方法。
1 四旋翼無人機數學模型
四旋翼無人機“Ⅹ”形機身結構如圖1所示。
無人機的4個旋翼分別由4個電機驅動,2個相鄰旋翼的旋轉方向相反。Ωii=1,2,3,4為轉子的角速度。慣性參考坐標系E=ex,ey,ez描述無人機相對于地面的位置變化。機身固定坐標系B=bx,by,bz描述四旋翼的空間位置坐標。三維空間中,狀態變量ξ=x,y,zT和δ=,θ,ψT分別描述無人機系統的位置信息和姿態信息。其中姿態角,θ,ψ分別代表滾轉角、俯仰角、偏航角。根據設計要求,給出姿態角的范圍(-π/2<<π/2)、(-π/2<θ<π/2)、(-π/2<ψ<π/2)。為了建立準確并適合于控制器設計的數學模型,對四旋翼無人機系統進行以下假設:
假設1四旋翼無人機是一類剛體;
假設2四旋翼無人機的機體結構是對稱的;
假設3四旋翼無人機飛行過程中,重力加速度不隨位置的變化而變化;
假設4慣性參考系是地面,機身重心與剛體固定坐標系的原點重合。
3 數值仿真
為了驗證定理1和定理3中所提出的四旋翼無人機自適應反步控制器和有限時間滑模控制器的有效性和優越性,采用Matlab軟件進行仿真,并在設計參數相同的條件下與不考慮時變負載的控制器進行對比。四旋翼無人機系統的初始狀態值設置為(x,y,z)=(0.1,2.5,2) m和(,θ,ψ)=(0.4π,0.4π,0.4π) rad,選取參考軌跡xd=2cos t,
yd=2sin t,zd=0.5t,ψd=0,
外部擾動
機模型參數和控制器設計參數分別如表1和表2所示。
為了探究時變負載對控制器的影響,將四旋翼的質量和負載變化模擬為正弦函數,靜態過載和指數下降的連續狀態,飛行過程中的負載變化曲線如圖3所示。相應的仿真結果如圖4—圖8所示。
該系統的三維軌跡圖和各個方向的投影圖如圖4所示。圖5和圖6分別表示位置子系統和姿態子系統的跟蹤曲線。位置子系統x,y,z的跟蹤誤差曲線ex=x-xd,ey=y-yd,ez=z-zd和姿態子系統,θ,ψ的跟蹤誤差曲線e=-d,eθ=θ-θd,eψ=ψ-ψd如圖7和圖8所示。由圖4—圖8可知,所設計的控制器使得四旋翼無人機系統具有較好的跟蹤性能。
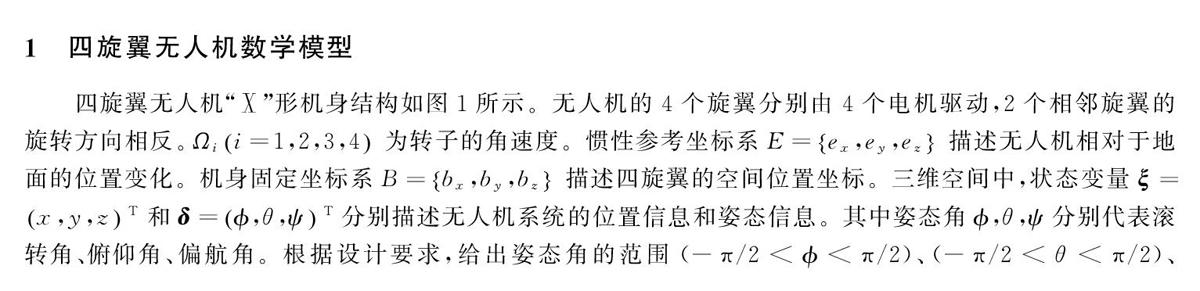
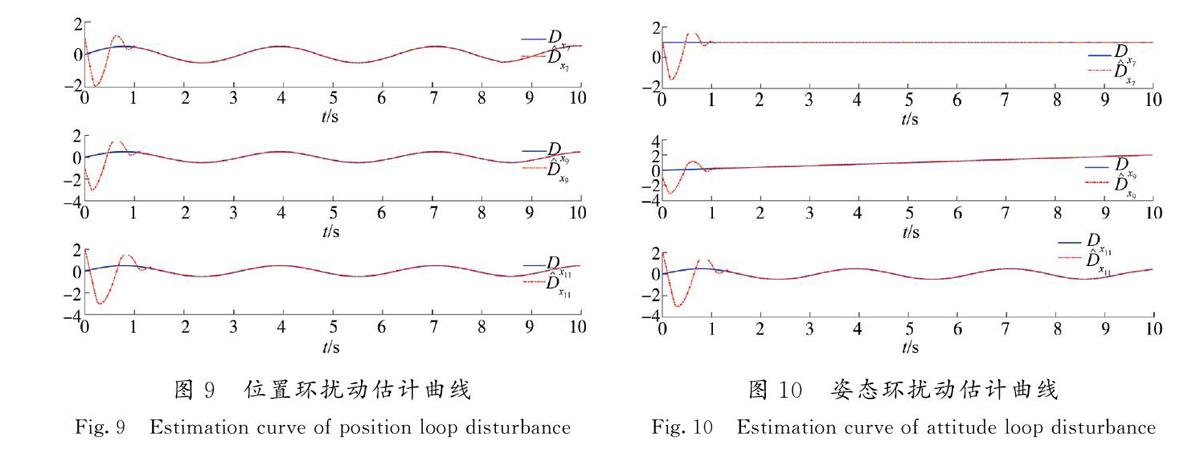
擾動觀測器對外部擾動的估計曲線如圖9所示,觀測器可以準確地估計外部擾動。此外,為了驗證擾動觀測器對不同擾動的有效性,圖10顯示了擾動觀測器針對不同外部擾動Dx7=1,Dx9=0.2t,Dx11=0.5sin2t的估計曲線。由圖9和圖10可知,擾動觀測器可以在有限時間內準確地估計未知的外部擾動。
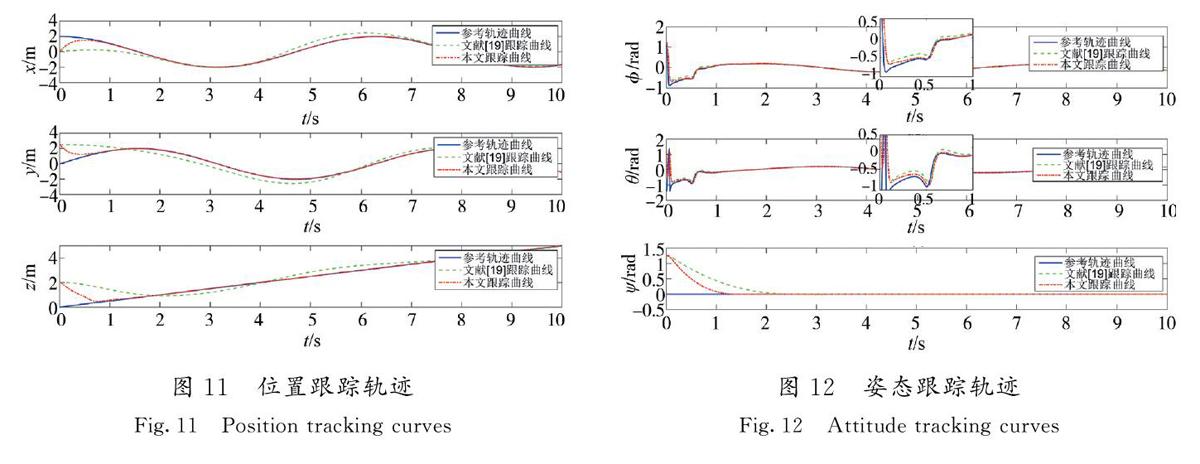
為了說明本文控制方法的優越性,與文獻[19]的控制方法進行對比仿真。得到的對比仿真結果如圖11—圖12所示。其中,位置子系統軌跡跟蹤曲線如圖11所示,姿態子系統軌跡跟蹤曲線如圖12所示。由圖11可知,本文提出的控制策略具有更好的跟蹤性能。由圖12可知,本文所提出的有限時間控制方法可以提高姿態子系統的跟蹤速度。
4 結 語
本文針對具有未知阻力系數、未知外部擾動和時變負載的四旋翼無人機系統設計了位置環和姿態環控制器。考慮了實際飛行過程中,四旋翼無人機系統同時具有時變負載、未知外部擾動和未知阻力系數的情況,利用自適應控制策略,打破了已有研究的局限性,提高了系統的收斂速度和魯棒性;同時,針對四旋翼無人機系統姿態環,提出了一種新的滑模面。基于所設計的滑模面和擾動觀測器,設計了有限時間控制策略,提高了系統的收斂速度,減少了外界擾動對系統的影響。
本文所設計的控制器雖然使得系統能夠在有限時間內收斂,但尚未實現系統狀態未知時的有限時間控制。接下來需要進一步完善數學模型和控制器,使四旋翼無人機系統能夠實現輸出反饋控制,更符合實際需求,進而達到更好的控制效果。
參考文獻/References:
[1] 方璇,鐘伯成.四旋翼飛行器的研究與應用[J].上海工程技術大學學報,2015,29(2):113-118.
FANG Xuan,ZHONG Bocheng.Research and application of four-rotor aircraft[J].Journal of Shanghai University of Engineering Science,2015,29(2):113-118.
[2] PHILLIPS B,HRISHIKESHAVAN V,YEO D,et al.Flight performance of a package delivery quadrotor biplane[C]//7th American Helicopter Society Technical Meeting on VTOL Unmanned Aircraft Systems and Autonomy.[S.l.]:American Helicopter Society International,2017:1-11.
[3] BERGAMASCO M,LOVERA M.Identification of linear models for the dynamics of a hovering quadrotor[J].IEEE Transactions on Control Systems Technology,2014,22(5):1696-1707.
[4] GARCA R A,RUBIO F R,ORTEGA M G.Robust PID control of the quadrotor helicopter[J].IFAC Proceedings Volumes,2012,45(3):229-234.
[5] ZHONGHAO D Y.PID control of four-rotor aircraft based on quaternion[J].Applied Mechanics and Materials,2014,484/485:1071-1075.
[6] ALOTHMAN Y,GUO M H,GU D B.Using iterative LQR to control two quadrotors transporting a cable-suspended load[J].IFAC-Papers-OnLine,2017,50(1):4324-4329.
[7] 王志方,付興建,李同.四旋翼飛行器的LQR優化控制[J].傳感器世界,2017,23(3):17-23.
WANG Zhifang,FU Xingjian,LI Tong.LQR optimal control for quadrotor aircraft[J].Sensor World,2017,23(3):17-23.
[8] RYAN T,JIN KIM H.LMI-based gain synthesis for simple robust quadrotor control[J].IEEE Transactions on Automation Science and Engineering,2013,10(4):1173-1178.
[9] WANG B,YU X,MU L X,et al.Disturbance observer-based adaptive fault-tolerant control for a quadrotor helicopter subject to parametric uncertainties and external disturbances[J].Mechanical Systems and Signal Processing,2019,120:727-743.
[10]LABBADI M,CHERKAOUI M.Robust adaptive backstepping fast terminal sliding mode controller for uncertain quadrotor UAV[J].Aerospace Science andTechnology,2019,93.doi:10.1016/j.ast.2019.105306.
[11]LIU H B,WANG H P,SUN J L.Attitude control for QTR using exponential nonsingular terminal sliding mode control[J].Journal of Systems Engineering and Electronics,2019,30(1):191-200.
[12]CHINGOZHA T,NYANDORO O.Adaptive sliding backstepping control of quadrotor UAV attitude[J].IFAC Proceedings Volumes,2014,47(3):11043-11048.
[13]ZHAO L,DAI L W,XIA Y Q,et al.Attitude control for quadrotors subjected to wind disturbances via active disturbance rejection control and integral sliding mode control[J].Mechanical Systems and Signal Processing,2019,129:531-545.
[14]DAI S C,LEE T,BERNSTEIN D S.Adaptive control of a quadrotor UAV transporting a cable-suspended load with unknown mass[C]//53rd IEEE Conference on Decision and Control.[S.l.]:IEEE,2014:6149-6154.
[15]VAHDANIPOUR M,KHODABANDEH M.Adaptive fractional order sliding mode control for a quadrotor with a varying load[J].Aerospace Science and Technology,2019,86:737-747.
[16]WU X W,XIAO B,QU Y H.Modeling and sliding mode-based attitude tracking control of a quadrotor UAV with time-varying mass[J/OL].ISA Transactions.[2019-08-17].https://pubmed.ncbi.nlm.nih.gov/31439392/.
[17]ZHANG J,DU H B,ZHU W W,et al.Attitude trajectory planning and finite-time attitude tracking control for a quadrotor aircraft[C]//IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society.[S.l.]:IEEE,2018:6167-6171.
[18]TIAN B L,CUI J,LU H C,et al.Adaptive finite-time attitude tracking of quadrotors with experiments and comparisons[J].IEEE Transactions on Industrial Electronics,2019,66(12):9428-9438.
[19]WANG N,DENG Q,XIE G M,et al.Hybrid finite-time trajectory tracking control of a quadrotor[J].ISA Transactions,2019,90:278-286.
[20]SHARMA M,KAR I.Finite time disturbance observer based geometric control of quadrotors[J].IFAC-PapersOnLine,2020,53(1):295-300.
[21]SHEN Y J,HUANG Y H.Uniformly observable and globally Lipschitzian nonlinear systems admit global finite-time observers[J].IEEE Transactions on Automatic Control,2009,54(11):2621-2625.
[22]SHTESSEL Y B,SHKOLNIKOV I A,LEVANT A.Smooth second-order sliding modes:Missile guidance application[J].Automatica,2007,43(8):1470-1476.
[23]ZHANG J Q,GU D W,REN Z H,et al.Robust trajectory tracking controller for quadrotor helicopter based on a novel composite control scheme[J].Aerospace Science and Technology,2019,85:199-215.
收稿日期:2021-04-21;修回日期:2021-09-10;責任編輯:馮 民
基金項目:國家自然科學基金(62003129,61903122);河北省研究生創新資助項目(CXZZSS2021098);國防基礎計劃研究項目;河北省重點研發計劃項目(19250801D)
第一作者簡介:武曉晶(1985—),女,河北石家莊人,副教授,博士,主要從事非線性系統控制及無人機自主飛行控制、協同控制方面的研究。
通訊作者:甄 然教授。E-mail:zhenranzr@126.com
武曉晶,鄭文棪,吳學禮,等.
基于擾動觀測器的時變負載四旋翼無人機自適應有限時間控制
[J].河北科技大學學報,2021,42(6):579-590.
WU Xiaojing,ZHENG Wenyan,WU Xueli,et al.
Adaptive finite-time control for quadrotor UAV with time-varying load based on disturbance observer
[J].Journal of Hebei University of Science and Technology,2021,42(6):579-590.
