多AUV溫躍層觀測(cè)方法研究
2021-12-30 15:24:50曾俊寶李樹江
海洋技術(shù)學(xué)報(bào) 2021年5期
關(guān)鍵詞:方法
王 琳 ,曾俊寶 ,李樹江,李 良
(1.沈陽工業(yè)大學(xué),遼寧 沈陽 110870;2.中國科學(xué)院沈陽自動(dòng)化研究所機(jī)器人學(xué)國際家重點(diǎn)實(shí)驗(yàn)室,遼寧 沈陽 110016;3.中國科學(xué)院機(jī)器人與智能制造創(chuàng)新研究院,遼寧 沈陽 110169;4.遼寧省水下機(jī)器人重點(diǎn)實(shí)驗(yàn)室,遼寧 沈陽 110169)
海洋是地球上最大的水體,是我們?nèi)祟愘囈陨娴牡诙粒渲校锢砗蜕铿F(xiàn)象對(duì)海洋的生態(tài)環(huán)境以及全球氣候有巨大影響。溫躍層是指海水中溫度在垂直方向上出現(xiàn)突變或不連續(xù)變化的水層[1-2]。在溫躍層中,其上下層海水物理性質(zhì)不同。這種躍變或不均勻的變化會(huì)引發(fā)其他海洋特性也發(fā)生躍變或者不均勻變化,如聲速的躍變、生物化學(xué)特性的躍變、魚群的巡游水層分布等,因此會(huì)對(duì)海洋漁業(yè)、水下通信、海軍潛艇活動(dòng)等產(chǎn)生重大影響[3-4]。傳統(tǒng)的海洋觀測(cè)主要利用浮標(biāo)、潛標(biāo)和船舶走航等方式進(jìn)行,這些傳統(tǒng)方式存在限制范圍、自主性差、實(shí)時(shí)性差等缺點(diǎn)。隨著科技水平的不斷發(fā)展,自主水下機(jī)器人(Autonomous Underwater Vehicle,AUV)越來越多地被應(yīng)用于海洋特征觀測(cè),AUV無論是在觀測(cè)范圍,還是在觀測(cè)精度上較傳統(tǒng)方式都有了質(zhì)的飛躍。如葡萄牙波爾圖大學(xué)(University of Porto)利用MARES型號(hào)AUV[5-7],采用垂直梯度法對(duì)溫躍層進(jìn)行觀測(cè)。美國麻省理工學(xué)院(Massachusetts Institute of Technology,MIT)采用AUV在無人監(jiān)控的情況下,獲取海洋溫躍層四維信息(空間+時(shí)間)。蒙特利灣海洋研究所(Monterey Bay Aquarium Research Institute,MBARI)利用AUV,采用最大梯度值方法,能夠在復(fù)雜海況下獲取標(biāo)準(zhǔn)溫躍層垂直剖面分布圖。中國科學(xué)院沈陽自動(dòng)化研究所田宇[8]提出了一種熱液羽流仿真模型,并且基于該模型,研發(fā)了一個(gè)AUV追蹤熱液羽流仿真研究環(huán)境對(duì)其所研究的算法提供了支持,康小東[9]采用多AUV編隊(duì)控制進(jìn)行熱液羽流跟蹤,并利用仿真平臺(tái)進(jìn)行了驗(yàn)證。
對(duì)于單個(gè)AUV探測(cè)溫躍層的邊界,傳統(tǒng)方法有七點(diǎn)二次平滑算法、最優(yōu)分割法、平均梯度法等。七點(diǎn)二次平滑算法[2]根據(jù)最小二乘法得到七點(diǎn)二次平滑公式,主要解決了由不等距微分法和垂直梯度法所獲取的要素垂直梯度結(jié)構(gòu)可能發(fā)生的震蕩,導(dǎo)致的躍層上、下界位置選取不夠準(zhǔn)確的問題。最優(yōu)分割法[10]主要是對(duì)溫躍層典型剖面以及幾類特殊剖面的溫躍層邊界進(jìn)行計(jì)算,進(jìn)而優(yōu)化了垂直梯度法在計(jì)算深海與淺海過渡區(qū)中躍層發(fā)生不連續(xù)性問題。并且,李鳳岐等[11]證明了該算法,即通過求兩次最優(yōu)二分割的方法求得最優(yōu)三分割。平均梯度法[12]采用的是計(jì)算整個(gè)AUV探測(cè)到的垂直水層溫度的平均溫度梯度,以此為閾值,根據(jù)溫度梯度是否大于這個(gè)閾值,來判斷是否在溫躍層內(nèi)。但這種方法適用范圍局限,只適合溫躍層分布均勻的海域。本文將采用垂直梯度法判別溫躍層的邊界,此方法較為簡(jiǎn)單易實(shí)現(xiàn)。
隨著多AUV集群技術(shù)的發(fā)展,多AUV協(xié)同海洋特征觀測(cè)的優(yōu)勢(shì)越來越明顯。相較于單個(gè)AUV,多AUV具有高度的空間和時(shí)間并行性,能夠有效擴(kuò)展水下任務(wù)的時(shí)空覆蓋范圍,通過多機(jī)交疊覆蓋作用,可以補(bǔ)償單個(gè)水下機(jī)器人獲取數(shù)據(jù)的不確定性和測(cè)量范圍的局限性。當(dāng)單個(gè)AUV在執(zhí)行任務(wù)時(shí),自身需攜帶多種設(shè)備,具備多種功能,造成體積大,控制復(fù)雜,會(huì)出現(xiàn)錯(cuò)誤,從而導(dǎo)致效率低、觀測(cè)效果不理想,所以依賴于多AUV間的信息共享,可構(gòu)建更為強(qiáng)大的數(shù)據(jù)知識(shí)庫,增強(qiáng)對(duì)環(huán)境的感知能力,實(shí)現(xiàn)單個(gè)AUV無法完成或難以完成的復(fù)雜任務(wù)。本文將針對(duì)多AUV溫躍層觀測(cè)這一研究背景,開展協(xié)同探測(cè)方法研究,并按以下順序進(jìn)行展開:第一部分描述了溫躍層的特征,并采用擬合曲線來描述這一特征;第二部分簡(jiǎn)要介紹了本文采用的AUV,由于不同的AUV所采用的驅(qū)動(dòng)方式不同,所以在探測(cè)方法上也有所區(qū)別;第三部分對(duì)單個(gè)AUV溫躍層跟蹤進(jìn)行了研究,介紹了所采用的方法及探測(cè)試驗(yàn)結(jié)果;第四部分對(duì)多AUV溫躍層探測(cè)方法進(jìn)行研究,介紹了探測(cè)方案、實(shí)現(xiàn)方法及探測(cè)結(jié)果。
1 溫躍層特征描述
溫躍層在不同海域形式也各不相同,分為多種形式,但我們一直以來所研究的溫躍層都是在我國近海區(qū)域,主要是在渤海、黃海、東海以及南海。這些區(qū)域的溫躍層有著季風(fēng)性變化,冬季風(fēng)氣候時(shí)期的溫躍層較夏季風(fēng)氣候穩(wěn)定,是觀測(cè)溫躍層形成的良好時(shí)期。根據(jù)溫度在垂直面上的結(jié)構(gòu)特點(diǎn),可將溫躍層分為以下幾類:標(biāo)準(zhǔn)溫躍層、雙溫躍層或多溫躍層、暖中間層和冷中間層、逆溫躍層[13]。在海洋中,溫躍層一般以標(biāo)準(zhǔn)溫躍層(單一溫躍層)的形式存在。溫躍層的主要特征值包括躍層強(qiáng)度、上界深度和厚度。溫躍層上界深度主要指自海表面向下,溫度梯度大于0.05℃/m(水深大于200 m)或0.2℃/m(水深小于200 m)所在的深度[14]。躍層強(qiáng)度主要指上下界取2個(gè)拐點(diǎn),拐點(diǎn)的斜率就是溫躍層強(qiáng)度,上下邊界的深度差就是溫躍層的厚度。圖1為3條線段構(gòu)成的簡(jiǎn)化溫躍層曲線,圖中兩個(gè)拐點(diǎn)對(duì)應(yīng)的上下邊界即為所表示溫躍層的上下邊界,上下邊界之間的深度即為溫躍層的厚度,兩拐點(diǎn)之間的線段斜率表示溫躍層的強(qiáng)度。為了對(duì)溫躍層進(jìn)行精確描述,本文通過對(duì)多個(gè)溫躍層數(shù)據(jù)分析,用式(1)所示的數(shù)學(xué)模型擬合了溫躍層溫度曲線,結(jié)果如圖2所示。
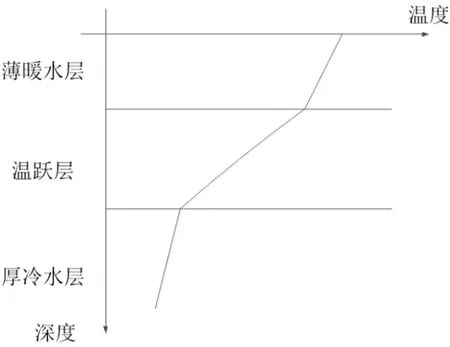
圖1 溫躍層簡(jiǎn)化圖

圖2 擬合的溫躍層曲線
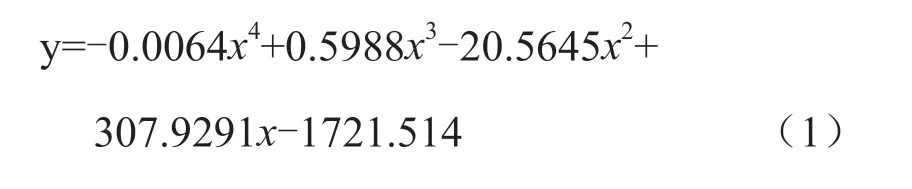
式中,x代表深度(m);y代表溫度(℃)。
2 “探索100”AUV
由于不同的AUV所采用的通信、控制及驅(qū)動(dòng)方式不同,所以探測(cè)方法也有所區(qū)別,本節(jié)主要介紹論文涉及的“探索100”AUV,如圖3所示。
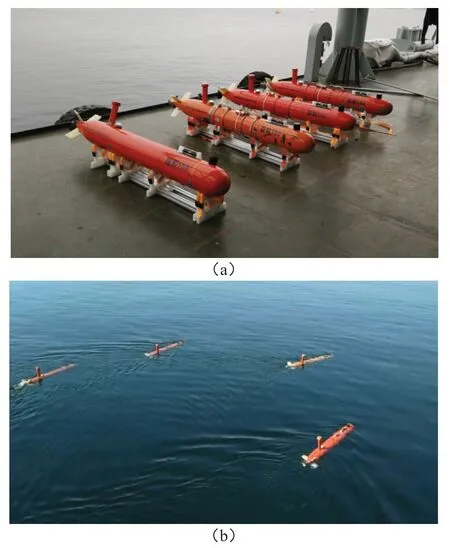
圖3 “探索100”AUV
“探索100”AUV是針對(duì)海洋生物、化學(xué)、物理等多種要素的高時(shí)空分辨率、立體組網(wǎng)觀測(cè)需求,在“十二五”國家“863計(jì)劃”和“十三五”國家重點(diǎn)研發(fā)計(jì)劃支持下,成功研制的便攜式自主水下機(jī)器人。經(jīng)過多次試驗(yàn),“探索100”AUV已成功應(yīng)用于冷水團(tuán)入侵、岬角渦旋及海洋聲場(chǎng)環(huán)境測(cè)量,并通過水下組網(wǎng)通信,多臺(tái)“探索100”AUV實(shí)現(xiàn)了自主編隊(duì),協(xié)同搜索等演示驗(yàn)證。
“探索100”AUV采用魚雷狀流線型外形,如圖4所示,從前往后依次由無線通信模塊、導(dǎo)航觀測(cè)模塊、聲學(xué)通信模塊、控制能源模塊和艉部推進(jìn)模塊組成。從圖中可以看出,“探索100”AUV艉部采用主推+舵翼的推進(jìn)方式,屬于欠驅(qū)動(dòng)的AUV,所以在探測(cè)策略上需要考慮它的驅(qū)動(dòng)能力,同時(shí)“探索100”AUV在導(dǎo)航觀測(cè)模塊部分安裝了高精度的溫鹽深傳感器,可以對(duì)海洋環(huán)境進(jìn)行感知,尤其是溫躍層的溫度和深度特征。
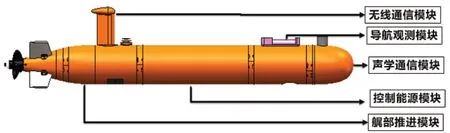
圖4 “探索100”AUV組成
為了實(shí)現(xiàn)組網(wǎng)協(xié)同探測(cè),“探索100”AUV在其艏部安裝了可以水下組網(wǎng)通信的水聲通信機(jī),并設(shè)計(jì)了一種用于水聲網(wǎng)絡(luò)的協(xié)議棧。該協(xié)議棧采用星形結(jié)構(gòu),各網(wǎng)絡(luò)層之間的信息傳遞都通過核心模塊進(jìn)行轉(zhuǎn)發(fā),所以該協(xié)議棧可支持同層多種協(xié)議同時(shí)工作,以支持在單個(gè)節(jié)點(diǎn)上運(yùn)行的各種應(yīng)用程序,同時(shí)提供了一種跨層通信的統(tǒng)一方法。AUV通過通信“感知”周圍的其他AUV,以使多AUV能夠以集群的方式運(yùn)行,如圖5所示。
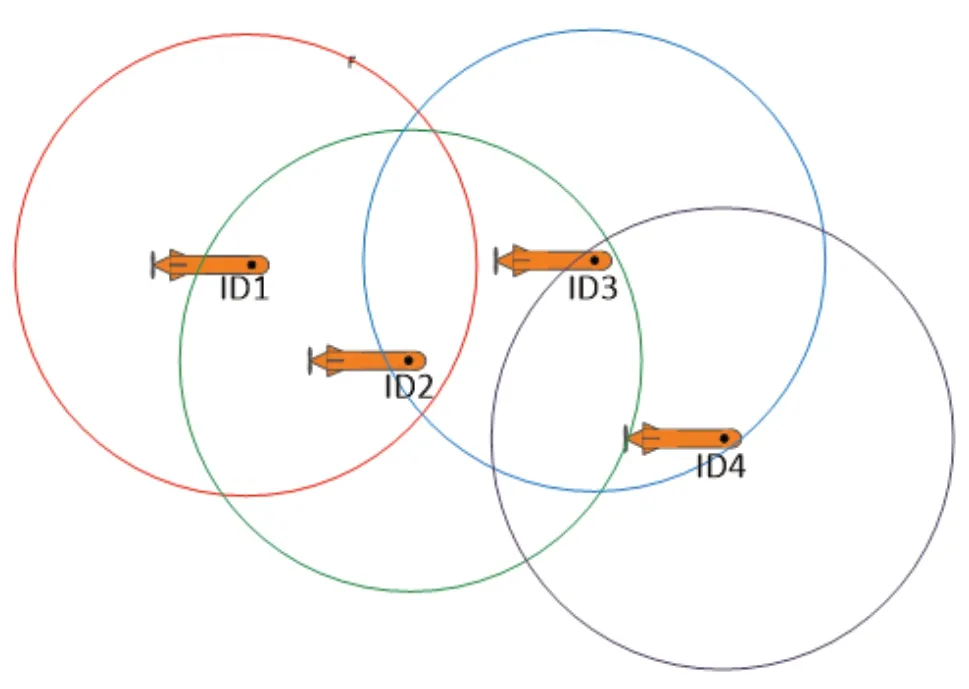
圖5 多AUV節(jié)點(diǎn)分布和通信示意圖
3 單個(gè)AUV跟蹤溫躍層
首先確定水體厚度Z,對(duì)其進(jìn)行分層;接著將傳感器采集到的溫度數(shù)據(jù)進(jìn)行處理,每一個(gè)水層上的溫度用一個(gè)數(shù)值代表;然后基于垂直梯度判別法確定溫躍層上下邊界;最后根據(jù)上下邊界,AUV進(jìn)行YO-YO運(yùn)動(dòng)(周期性運(yùn)動(dòng)),跟蹤溫躍層。
3.1 確定水體分層厚度
由于水體中存在噪聲,若對(duì)整個(gè)水體進(jìn)行溫度數(shù)據(jù)采集不具有代表性,所以將水體進(jìn)行分層,分別對(duì)每一層的水體溫度進(jìn)行采集優(yōu)化,而水體分層厚度Z的選取很重要。在孫龍飛等[15]的基于自適應(yīng)閾值的自主水下機(jī)器人溫躍層探測(cè)方法研究中,經(jīng)過處理場(chǎng)外試驗(yàn)數(shù)據(jù),得出不同Z值對(duì)計(jì)算的溫度梯度有很大差別的結(jié)論。如果Z小,則采樣點(diǎn)較少,噪聲影響大;如果Z大,則曲線過于平滑,無法看出溫躍層邊界峰值點(diǎn),不能很好地確定溫躍層的邊界。需要利用AUV的載體運(yùn)動(dòng)速度v,YO-YO運(yùn)動(dòng)上浮下潛角θ,傳感器CTD的采樣頻率來fCTD確定分層厚度Z,公式如下[15]。
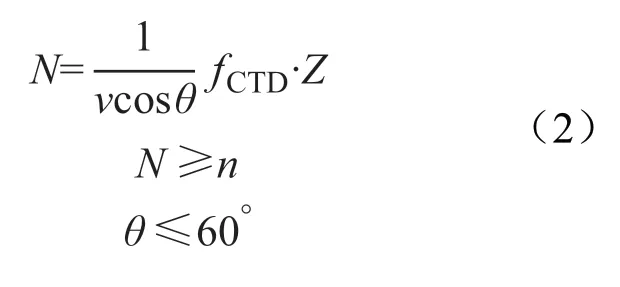
式中,N代表采樣點(diǎn)個(gè)數(shù);n代表最低采樣點(diǎn)數(shù),設(shè)最低采樣點(diǎn)數(shù)為16個(gè),AUV進(jìn)行YO-YO運(yùn)動(dòng)的上浮和下潛角不大于60°。設(shè)AUV的載體速度v=2 m/s,傳感器CTD的采樣頻率fCTD=16 Hz,計(jì)算得到Z=1 m。
3.2 溫躍層溫度數(shù)據(jù)處理
由于同一深度的溫度值不同,故采取溫度均勻指數(shù)法進(jìn)行溫度數(shù)據(jù)處理。首先對(duì)水體分層后的上下層邊界處進(jìn)行溫度數(shù)據(jù)采集,分別采集8個(gè)點(diǎn),然后取其平均值。
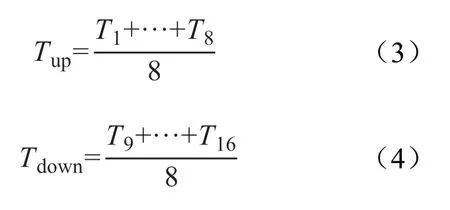
式中,Tup代表薄暖水層的上邊界溫度;Tdown代表薄暖水層的下邊界溫度,將AUV剛進(jìn)入的水層稱為薄暖水層。
最后求出整個(gè)水層的平均值。
式中,Tshallow代表薄暖水層的溫度值,同理,求出厚冷水層的溫度值。
3.3 判斷溫躍層上下邊界
本文將采用垂直梯度法進(jìn)行判別溫躍層的上下邊界,因?yàn)槊恳粋€(gè)水層中溫度用一個(gè)數(shù)值代表,所以先求出兩個(gè)相鄰水層之間的溫度差值,再求出溫度梯度。
式中,Tm+1為m+1的水層溫度;Tm為m的水層溫度;T則為相鄰水層的溫度差值;TGrad為溫度梯度。
判斷溫度梯度值與規(guī)定的閾值大小,根據(jù)下式判斷AUV確定是否在溫躍層內(nèi)。

式中,Tred為閾值,Tred的取值為0.05 °C/m(水深大于200m)。若上式成立,則AUV可能處于溫躍層內(nèi)。
3.4 外場(chǎng)試驗(yàn)結(jié)果與分析
根據(jù)3.1—3.3節(jié)所述的方法對(duì)外場(chǎng)試驗(yàn)進(jìn)行設(shè)計(jì),試驗(yàn)步驟如下。
AUV按照預(yù)編程的深度先進(jìn)行一次最大深度的YO-YO運(yùn)動(dòng),第二次進(jìn)行YO-YO運(yùn)動(dòng)時(shí),當(dāng)TGrad≥Tred時(shí),則計(jì)數(shù)器Count= 1;重復(fù)YO-YO進(jìn)行運(yùn)動(dòng),如果TGrad≥Tred,則計(jì)數(shù)器Count++=2否 則Count=0;當(dāng)Count=3時(shí),則 認(rèn) 為AUV探測(cè)到溫躍層的上邊界并開始進(jìn)入溫躍層;同理當(dāng)AUV在溫躍層里且TGrad≥Tred時(shí),Count= 1;重復(fù)YO-YO運(yùn)動(dòng),如果TGrad≥Tred,則計(jì)數(shù)器Count++=2;當(dāng)Count=3時(shí),則認(rèn)為AUV探測(cè)到溫躍層的下邊界并駛出溫躍層。AUV在上下邊界內(nèi)持續(xù)做YO-YO運(yùn)動(dòng),直到預(yù)定時(shí)間結(jié)束后,完成溫躍層探測(cè)任務(wù),返航至母船附近。
2019年12月,在千島湖按照上述步驟進(jìn)行了單AUV跟蹤溫躍層試驗(yàn),其溫度與深度在場(chǎng)外的試驗(yàn)數(shù)據(jù)繪制如圖6所示。
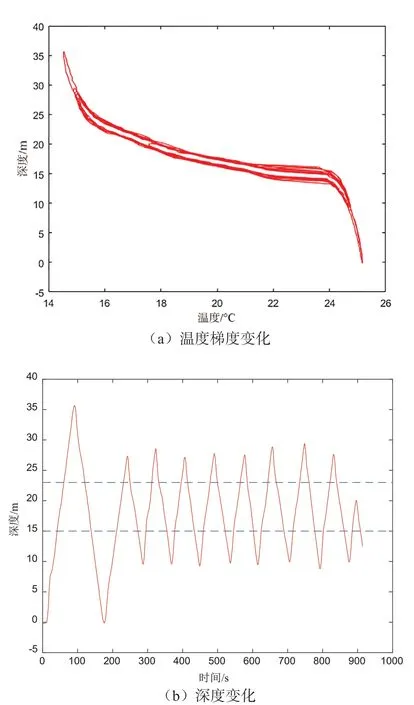
圖6 單AUV跟蹤溫躍層
由圖6(a)可知,深度在15~23 m時(shí),溫度變化大,是溫躍層區(qū)域;而由圖6(b)可以看出,AUV能 在10~25 m深度范圍內(nèi)進(jìn)行YO-YO運(yùn)動(dòng),很好地跟蹤了溫躍層的上下邊界,達(dá)到了單臺(tái)AUV跟蹤溫躍層的效果(由于AUV在運(yùn)動(dòng)航行時(shí)存在慣性,深度控制存在滯后性,所以跟蹤范圍較大,圖中虛線部分為實(shí)際溫躍層的范圍)。
4 多AUV協(xié)同跟蹤溫躍層
由于單個(gè)AUV進(jìn)行跟蹤溫躍層,無法實(shí)現(xiàn)實(shí)時(shí)跟蹤的效果,會(huì)對(duì)溫躍層的跟蹤出現(xiàn)差異,所以引入多AUV協(xié)同跟蹤溫躍層。針對(duì)溫躍層的特點(diǎn),本文采用3臺(tái)“探索100”AUV編隊(duì)執(zhí)行溫躍層觀測(cè)任務(wù),其中一臺(tái)AUV作為領(lǐng)航者在垂直面上做大范圍的YO-YO運(yùn)動(dòng),并對(duì)采集的溫度信息進(jìn)行處理后,將溫躍層上邊界和下邊界信息,以及自身的航行位置信息通過水聲傳遞給另外兩臺(tái)AUV,由它們?cè)诒3峙c領(lǐng)航者一定隊(duì)形的前提下,分別執(zhí)行對(duì)上下邊界的跟蹤,如圖7所示。圖中,1#AUV為領(lǐng)航者,2#AUV與3#AUV為跟隨者。
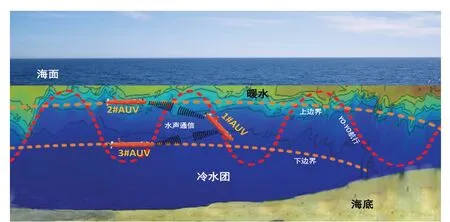
圖7 多AUV節(jié)點(diǎn)分布和通信示意圖
4.1 編隊(duì)方法
多AUV協(xié)同跟蹤溫躍層主要編隊(duì)的方式不同,目前,實(shí)現(xiàn)多AUV系統(tǒng)編隊(duì)航行的控制方法主要包括基于領(lǐng)航者—跟隨者的方法、基于虛擬結(jié)構(gòu)的方法、基于人工勢(shì)能的方法、基于行為的方法、基于路徑跟隨的方法和基于信息一致性的方法等。本文將采用基于領(lǐng)航者—跟隨者法去協(xié)同探測(cè)溫躍層,這個(gè)方法相較于其他方法其編隊(duì)控制結(jié)構(gòu)簡(jiǎn)單,易于實(shí)現(xiàn)。
采用領(lǐng)航者—跟隨者法,領(lǐng)航者和跟隨者分別按照預(yù)編程的路徑進(jìn)行運(yùn)動(dòng),領(lǐng)導(dǎo)者通過水聲通訊周期性廣播將自身的位置、姿態(tài)告知跟隨者,跟隨者根據(jù)與領(lǐng)航者設(shè)定的目標(biāo)航向(θ)和目標(biāo)距離(d),計(jì)算出自己的虛擬目標(biāo)點(diǎn)(A),改變自身速度并通過跟蹤虛擬目標(biāo)點(diǎn)來保持整體隊(duì)形控制,流程圖見圖8。跟隨者與虛擬目標(biāo)點(diǎn)位置關(guān)系如圖9所示。
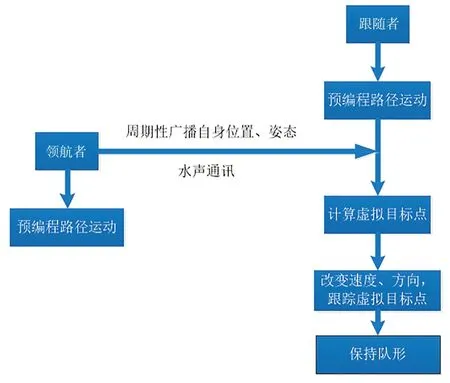
圖8 小AUV編隊(duì)控制流程圖
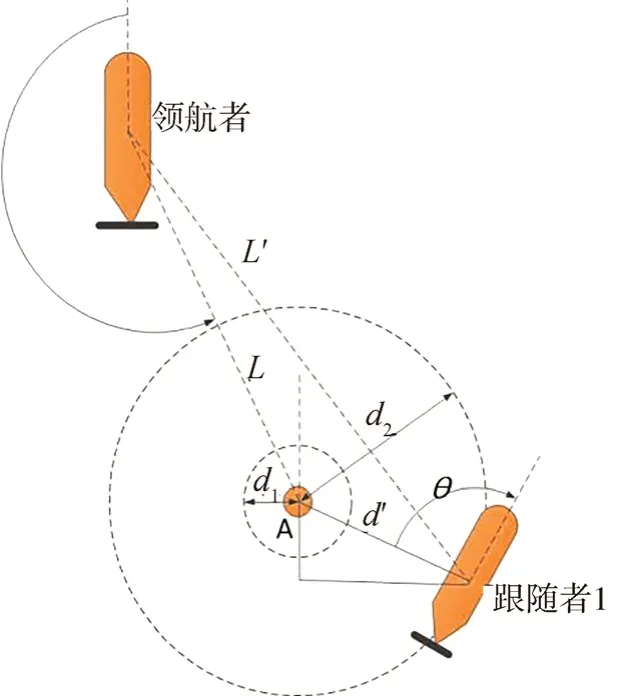
圖9 跟隨者與虛擬目標(biāo)點(diǎn)位置關(guān)系
L′跟隨者與領(lǐng)航者的實(shí)時(shí)距離,L為跟隨者與領(lǐng)航者的期望距離,d1為跟隨者與虛擬目標(biāo)點(diǎn)的容許誤差距離,d2為跟隨者與虛擬目標(biāo)點(diǎn)的最大誤差距離,d′為跟隨者與虛擬目標(biāo)點(diǎn)的實(shí)際距離,θ為跟隨者與虛擬目標(biāo)點(diǎn)的夾角。
若跟隨者1運(yùn)動(dòng)時(shí)距虛擬目標(biāo)點(diǎn)(A)的距離d′大于規(guī)劃的距離d2且運(yùn)動(dòng)時(shí)領(lǐng)導(dǎo)者與跟隨者1之間的距離L′大于規(guī)劃的距離L,跟隨者1處于滯后狀態(tài),則跟隨者1需要超級(jí)加速到達(dá)虛擬目標(biāo)點(diǎn)(A);若跟隨者1運(yùn)動(dòng)時(shí)距虛擬目標(biāo)點(diǎn)(A)的距離d′在d1與d2之間且運(yùn)動(dòng)時(shí)領(lǐng)導(dǎo)者與跟隨者1之間的距離L′大于規(guī)劃的距離L,跟隨者1處于落后狀態(tài),則跟隨者1需要加速到達(dá)虛擬目標(biāo)點(diǎn)(A);若跟隨者1運(yùn)動(dòng)時(shí)距虛擬目標(biāo)點(diǎn)(A)的距離d′在d1范圍內(nèi),跟隨者1處于正常狀態(tài),則跟隨者1只需要恒速行駛即可;同理,跟隨者1處于超前或激進(jìn)狀態(tài)則需要加速或超級(jí)加速[16]。領(lǐng)導(dǎo)者與跟隨者的運(yùn)動(dòng)策略如表1所示。
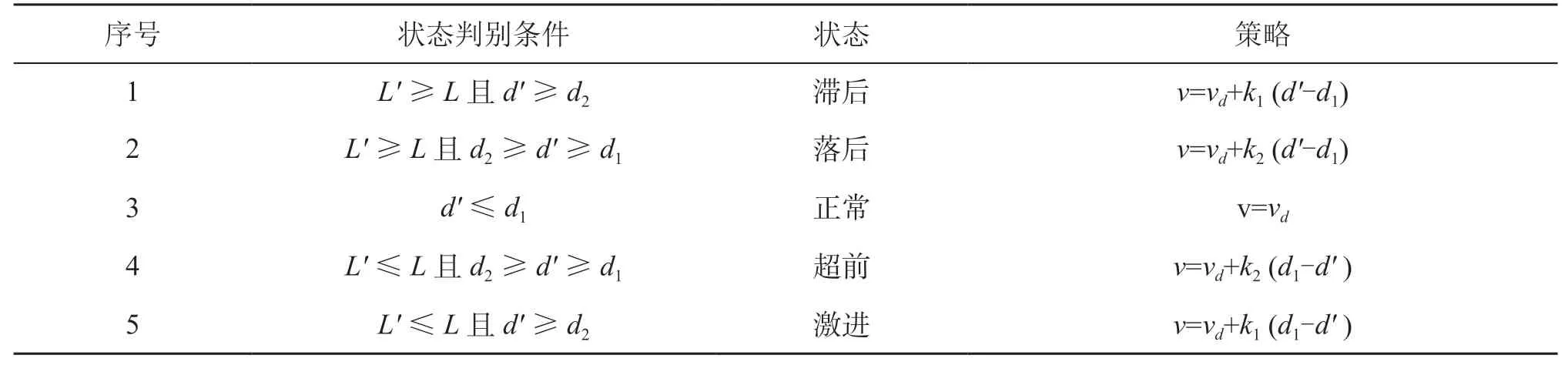
表1 跟隨者狀態(tài)判別
4.2 湖上試驗(yàn)
3臺(tái)AUV從母船處逐個(gè)放出,各AUV先自主航行至各自初始點(diǎn),并圍繞著各自的初始點(diǎn)在水下盤旋圓周運(yùn)動(dòng),等待統(tǒng)一的觸發(fā)時(shí)間,然后開始編隊(duì)協(xié)同跟蹤試驗(yàn),試驗(yàn)結(jié)果如圖10所示。圖中1#AUV為領(lǐng)航者,進(jìn)行YO-YO運(yùn)動(dòng),將通過勢(shì)函數(shù)得到的溫度信息進(jìn)行梯度解算,得到溫躍層上下邊界,分別為11 m和27 m,并將該信息以及自身位置發(fā)送給2#AUV和3#AUV,令其執(zhí)行上下邊界跟蹤使命。
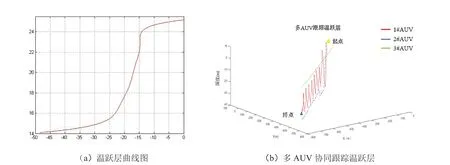
圖10 場(chǎng)外試驗(yàn)結(jié)果圖
圖10(a)即為溫躍層的曲線圖,在斜率大的范圍內(nèi)為溫躍層的區(qū)域,圖10(b)為多AUV協(xié)同跟蹤溫躍層,紅色為領(lǐng)航者1#AUV運(yùn)動(dòng)軌跡,藍(lán)色和綠色分別為2#AUV和3#AUV的運(yùn)動(dòng)軌跡,結(jié)合單AUV跟蹤溫躍層的運(yùn)動(dòng)軌跡(圖6(b))可知,多AUV中各自AUV的探測(cè)范圍相比單AUV更大,獲得信息更多,能一直實(shí)時(shí)跟蹤溫躍層,充分體現(xiàn)多AUV協(xié)同探測(cè)的優(yōu)勢(shì)。
5 結(jié) 論
本文主要介紹了采用中國科學(xué)院沈陽自動(dòng)化研究所研制的“探索100”AUV跟蹤海洋中的溫躍層現(xiàn)象。闡述了溫躍層的主要特征,并提出了一種垂直下降法AUV溫躍層的跟蹤算法,該算法利用垂直方向上的梯度來確定溫躍層的上下邊界,可以實(shí)現(xiàn)對(duì)溫躍層的實(shí)時(shí)觀測(cè)。針對(duì)單AUV探測(cè)溫躍層的不足,引入了多AUV協(xié)同自主探測(cè),采用了領(lǐng)航者—跟隨者的編隊(duì)方法,領(lǐng)航者AUV通過水聲通信將信息傳遞給跟隨者AUV,實(shí)現(xiàn)實(shí)時(shí)跟蹤。最后,通過湖上試驗(yàn)驗(yàn)證了多AUV協(xié)同探測(cè)溫躍層的可行性,能同時(shí)跟蹤到溫躍層,提高了AUV跟蹤溫躍層效率,實(shí)現(xiàn)了實(shí)時(shí)跟蹤,取得了更好的觀測(cè)效果。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56