基于粒子群優化算法的LS-SVM高壓隔離開關故障診斷
2021-12-30 03:07:08國網江蘇省電力有限公司檢修分公司劉永康江蘇科能電力工程咨詢有限公司
電力設備管理 2021年12期
國網江蘇省電力有限公司檢修分公司 劉永康 江蘇科能電力工程咨詢有限公司 王 慧
高壓隔離開關在電力系統中起著隔離電源及調整系統運行方式的作用,在高壓設備檢修工作時保障人身、電網及設備的安全。由于操作原理和結構相對簡單,隔離開關的日常運維與檢修工作并沒有引起人們的足夠重視,且隨著變電站的改造及變電設備由定期檢修制向狀態檢修制的逐步過渡,其檢修周期也在逐漸延長。由于日常操作隔離開關次數較少,隔離開關易出現傳動部位變形、卡澀以及隔離開關分、合閘不到位的問題。目前隔離開關狀態檢測主要依賴紅外測溫或回路電阻測量等手段對觸頭或線夾位置的發熱情況進行監測。隔離開關操作機構的狀態監測還沒有成熟的方法,僅依賴運維人員現場巡視難以發現操作機構早期存在的問題,一旦發現操作機構存在問題時往往都需安排應急搶修,影響送電時間及供電可靠性。
隨著大數據時代的到來,基于在線監測與故障診斷技術電網設備狀態維修策略能有效預警設備故障,現有國內、外的實際運行情況表明,電網設備在線監測技術具有良好的應用前景,是智能電網發展的必然趨勢。目前電力設備狀態檢修的研究和應用主要集中在變壓器、斷路器等部分主設備上,關于高壓隔離開關在線監測的研究還十分欠缺。其中,基于驅動電機電流信號的監測方法是一種利用驅動電機電流時間特性來診斷設備機械故障的在線監測方法,已在高壓斷路器、變壓器有載分接開關等開關設備上開展了相關研究及應用,但在高壓隔離開關機械故障診斷中尚無實際應用。高壓隔離開關操作不靈活時操作力矩增大,驅動電機電流也將增大并超過正常工作電流。因此,通過合理選擇算法對驅動電機電流進行分析同樣可用于高壓隔離開關的故障診斷中。
最小二乘支持向量機(LS-SVM)算法已成功運用到高壓斷路器、變壓器等設備故障診斷。但最小二乘支持向量機參數的確定一直是難點,采用網格搜索或十倍交叉驗證等方法效率慢且參數無法達到最優。粒子群優化(PSO)算法是一種群智能方法的進化技術,速度快、局部搜索能力強,相比于遺傳算法、蟻群算法,PSO 算法具有算法簡單、容易實現、調節參數少等特點。
1 LS-SVM 基本原理
SVM(支持向量機)算法可對小樣本進行高維非線性系統擬合[1]。LS-SVM 是向量機的擴展算法,將向量機算法二次規劃問題轉為線性方程組問題,降低計算的難度[2]。LS-SVM 演算流程如下。設訓練數據樣本集為:S={(xi,yi)|(xi ∈{-1,+1} yi∈{-1,+1},i=1,2,…,l,xi為l 維的輸入,yi為輸出,l為樣本數。算法的目標函數為:

ψ(x)是核空間映射函數,w是權矢量,b是偏置量,ei是誤差變量,γ 是可調參數。加入Lagrange 乘子,將上述優化問題轉化為:,ai為Lagrange乘子。分別對w,b,e,a 求偏微分:

求解式(4),LS-SVM 模型表述為式(5),K(x,xi)為核函數, 徑向基核函數作為核函數時為式(6),σ>0,γ為懲罰因子,σ2為核函數:
2 粒子群優化算法(PSO)優化LS-SVM
2.1 粒子群優化算法(PSO)算法原理
粒子群優化算法(PSO)源于對鳥群捕食行為的學習研究,通過模擬鳥兒運動尋找全局最優解[3]。PSO 初始化為一群隨機粒子,通過不斷迭代尋找最優解。粒子采用兩個“極值”來不斷更新,一個是粒子個體查到過的最優解,另一個是所有粒子中已經查到的最優解。若m 維空間中有n 個粒子正在尋優,第j 個粒子當前解設為Xj(t)=[xj,1(t),xj,2(t),…xj,m(t)],其運動速度設為Vj(t)=[vj,1(t),vj,2(t),…vj,m(t)]單個粒子歷史最優解設為Pj,best(t)=[vj,best,1(t),vj,best,2(t)…vj,best,m(t) ],所有粒子最優解設為gbest(t)=[gbest,1(t),gbest,2(t)…gbest,m(t)]。
那么,下一代的粒子解和運動速度為Xj(t+1)=Xj(t)+Vj(t),Vj(t+1)=wVj(t)+c1R1[pj,best(t)-Xj(t)]+c2R2[gbest(t)-Xj(t)]式中j=1,2,…,n;c1和c2為加速因子,一般取值為2;w 為慣性因子,R1和R2為[0,1]之間的隨機數,每次迭代過程中每個粒子都將隨機生成一組R1和R2。Vj(t)∈(-Vmax,Vmax),Vmax為運動速度上限,設置為常數。
2.2 優化算法
LS-SVM 參數選擇:以使用范圍最廣的高斯徑向基函數作為LS-SVM 算法的核函數,需確定懲罰因子γ 和核函數σ2。一般通過網格遍歷的方法不斷實驗確定最優參數,但是該方法效率十分低下。
將采集到的樣本數據分為兩部分,一部分作為訓練數據、一部分作為測試數據。用訓練樣本數據用于訓練LS-SVM 得到了LS-SVM 模型。用測試數據輸入模型得到的分類結果與實際結果進行比對,分析模型的優劣。以分類的正確率作為模型目標函數:f=m/n×100%,式中:f 為適應度值;n 為訓練數據個數;m 為測試結果正確的個數。
在基于PSO 優化LS-SVM 的算法中,每個粒子有兩個參數,表示LS-SVM 的核函數參數懲罰因子γ 和核參數σ2。優化流程為:粒子位置進行初始化,生成初始參數{γ,σ2};采用訓練數據基于{γ,σ2}參數訓練向量機模型,采用測試數據比對實際結果判斷準確性;以測試數據的分類正確性作為目標函數,更新粒子的最優值pbest和gbest,然后利用PSO 算法迭代更新粒子數據{γ,σ2};重復第二、三步驟,直到迭代次數到達設定值或目標函數要求后結束迭代。
3 基于PSO 優化LS-SVM 高壓隔離開關故障診斷
3.1 高壓隔離開關故障診斷樣本集的建立
隔離開關操動機構的電機定子相電流包絡與隔離開關傳動機構受到的阻力大小有直接關系,通過分析電流波形可分析隔離開關操作機構的卡澀故障情況[4]。驅動電機的電流波形如圖1。圖中:t0~t1為電機啟動階段,此時有較大的脈沖信號;t1~t2為轉子轉動階段,電機產生反電勢,電流下降;t2~t3為電動機平穩轉動階段;t3隔離開關動靜觸頭開始接觸,電機受到的阻力增加、電流增加,并在t4出現最大值。t5隔離開關合閘到位,行程開關動作將電機電流切斷。
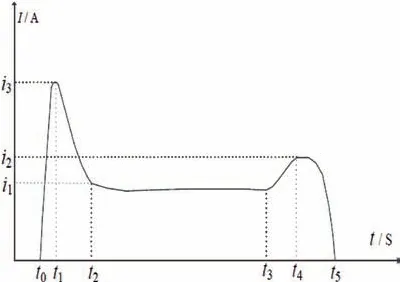
圖1 隔離開關驅動電機的電流波形

圖2 檢驗樣本分類正確率
隔離開關出現操作機構卡澀或平衡彈簧失效等情況時電機阻力增加、電流會變大。通過電機電流最大值可分析操作機構卡澀的嚴重程度,根據最大值的位置及電流曲線轉折點可分析卡澀的位置。通過對合閘電流波形的分析,選取i1~i3和t1~t5為特征量,建立隔離開關故障診斷樣本。
3.2 粒子群優化LS-SVM 的高壓隔離開關故障診斷
采用粒子群算法對LS-SVM 進行優化,粒子群的參數設置如下:學習因子c1=c2=2,慣性權重ωmax=0.9,ωmin=0.2,種群規模取30,最大迭代數取200;LS-SVM 待優化的參數為懲罰因子γ 和σ2核函數兩個參數,因此PSO 的粒子大小為2。γ 的優化范圍取[0.1,1000],σ2的優化范圍取[0.01,1000]。LS-SVM 算法的輸入向量為i1,i2,i3和t1,t2,t3,t4,t5,輸出量為隔離開關機構正常、操作傳動機構卡澀兩類故障的分類。其中操作傳動機構卡澀通過在隔離開關導電臂、拐臂等位置施加不同大小的拉力來模擬。LS-SVM 算法采用K.DeBrabanter 等編寫的MATLAB LS-SVM 工具箱實現。
隔離開關實驗對象為GW6-126W 型,通過實驗模擬50個隔離開關正常樣本、50個操作卡澀故障樣本;然后選取30個正常樣本及30個故障樣本作為學習樣本,其余樣本作為檢驗樣本,檢驗的正確率作為粒子群算法的適應度,通過粒子群算法優化LS-SVM的懲罰因子γ 和σ2核函數 。粒子群適應度在迭代過程的優化曲線如圖2,可看出經PSO 優化后樣本分類正確率穩步提高,經過優化后 γ=12.08, σ2=6.92。重新選取100個樣本,利用優化后的LS-SVM 對樣本進行分類檢驗。檢驗結果正確率為92%。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
裝備制造技術(2020年3期)2020-12-25 05:22:30
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
現代企業(2015年2期)2015-02-28 18:45:09
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
