棱鏡遮蔽視準線改造法在大壩水平位移監測中的應用
2021-12-30 03:07:08國網湖南水電分公司
電力設備管理 2021年12期
國網湖南水電分公司 曾 遠 梅 浩
視準線測量是大壩水平位移監測項目之一,傳統視準線測量采用經緯儀和活動覘標配合測量,直接讀出測點與固定視準線的距離來監測大壩水平位移。但視準線測量受地形限制,在大壩上游山體無法建立兩個通視條件良好且地基穩固的儀器工作基點,造成了左右岸視距不等,精度不一致,且人員定向誤差及人員配合操作帶來的觀測誤差較大。綜合而言,傳統視準線測量法存在一定的局限性。
隨著視準線儀器的T3經緯儀的停產及老化,尋找更加高效快捷的視準線監測方法變得迫切。智能型全站儀的廣泛普及和應用,采用小角度或極坐標法可同時測角和測距,通過計算夾角和平距換算變化量,通過計算兩次變化量就可確定測點周期內的偏移量[1]。但采用全站儀替換T3經緯儀和用棱鏡替換活動覘標時,對于傳統老壩工作基點選取受限制,只能在原有工作基點進行改造,全站儀測量時相鄰測點間夾角較小,視場內存在多個棱鏡、相互干擾,易導致全站儀難照準、測量數據不準確等問題。為解決視準線測點間夾角較小、影響觀測,促進視準線改造,提出棱鏡遮蔽視準線改造法進行大壩水平位移監測。
1 棱鏡遮蔽視準線改造法
棱鏡遮蔽視準線改造采用一款智能棱鏡罩配合全站儀進行小角度或極坐標測量,實現棱鏡罩自動門遠程啟閉,打開棱鏡罩進行測量通視,測量完畢關閉自動門,有效錯開相互影響的視準線測點,增大測點間的夾角。
智能棱鏡罩的原理。智能棱鏡罩主要包括棱鏡罩外殼、自動啟閉裝置、自動氣象測量元器件。棱鏡罩的尺寸設計要匹配現有觀測墩的尺寸,做到尺寸合適、經濟適用;棱鏡罩啟閉裝置采用wifi 版機械手臂,其行程為90°的旋轉角,在測站位置可通過移動設備控制旋轉機械手臂打開棱鏡罩小門,實現測量時能開啟自動門進行測量通視,測量完畢可關閉自動門。且智能棱鏡罩內加裝環境量傳感器,實現自動測量測站氣象值,為進行后續內業處理提供氣象修正。
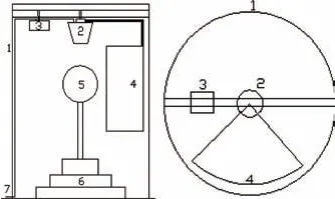
圖1 智能棱鏡罩內部構造示意圖
視準線小角度觀測方法。在視準線的工作基點A 架設儀器,另一端的工作基點B 和測點i 上架覘牌或棱鏡,依次對準工作基點B 和測點i,測量夾角BAi 的角度β 和Ai 之間的距離S。根據《DL/T 5209-2020混凝土壩安全監測資料整編規程》[2],視準線測點的測值L 計算為L=β×ρ/S,式中β為小角度觀測值,ρ為206265,S 為工作基點到測點間的水平距離、mm。某周期測點位移為首次偏離值與該周期偏離值的差,其符號在規范規定為:向下游位移為正,所以偏移值根據水流方向和測點位置略有調整。
視準線極坐標觀測方法。在視準線的工作基點A 架設儀器,另一端的工作基點B 和測點i 上架設棱鏡,依次對準工作基點B 和測點i,測量夾角BAi 的角度β 和Ai 之間的距離S。根據《DL/T 5209-2020 混凝土壩安全監測資料整編規程》[2],極坐標法測量已知有工作基點A、B 的坐標,測點i的坐標計算方法如下:
Xi=XA+DAicos?Ai、Yi=YA+DAisin?Ai,式中Xi為測點i 的X 方向坐標,m;Yi為測點i 的Y 方向坐標,m;XA為測點i 的X 方向坐標,m;YA為測點i 的Y 方向坐標,m;αAi為方向Ai 的坐標方位角,°;DAi為邊長Ai 的水平距離,m。
2 棱鏡遮蔽視準線改造法的運用案例
2.1 工程概況
柘溪大壩現有壩頂水平位移采用傳統視準線法進行監測,其工作基點分別位于兩岸穩定的巖石上,兩工作基點之間的距離為473.3m。測點布設在壩頂下游欄桿外專用的牛腿上,共16個測點。在視準線改造中受地形和壩形的限制,在大壩下游側難以找到合適的工作基點,只能在原有的工作基點進行視準線改造。且因大壩電梯井擋住視線,所有測點并不能完全通視,只能分段測量。
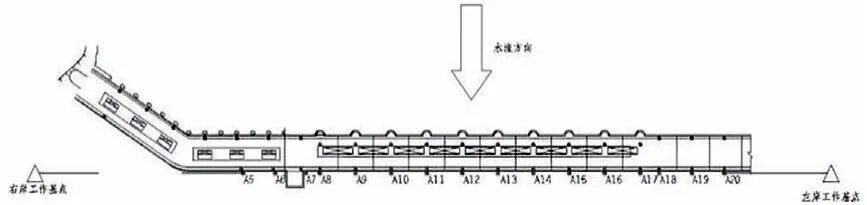
圖2 柘溪大壩視準線測點
壩頂16個測點在壩頂呈直線布設,在工作基點架設全站儀測量時,部分測點間夾角較小,視場內出現多個棱鏡,如在左岸工作基點架設儀器,A7和A8同時出現、A17與A18同時出現;在右岸工作基點架設儀器,A19和A20同時出現,后經測量其中A7與A8間距為4.40米、水平夾角為0.6”,A19與A20的間距為14.12米、水平夾角為0.4”。
2.2 測量對策
在壩頂每個視準線觀測墩安裝固定棱鏡,并配套安裝智能棱鏡罩保護棱鏡。因電梯井擋住視線、故分段監測,右岸基點監測A5~A6、A11~A13、A19~A20共7個測點;左岸基點監測A7~A10、A14~A18共9個測點。測量分別采用小角度和極坐標法進行壩頂水平位移監測,對每個測點進行四測回測邊測角觀測,測點間夾角影響分批次開啟棱鏡罩進行測量,如右岸工作基點設站時,先將A7、A9、A14、A16、A18的棱鏡罩門打開進行測量,待測量完畢,再將A7、A9、A14、A16、A18的棱鏡罩關閉,打開A8、A10、A15、A17的棱鏡罩門打開進行測量。同樣的工作原理在左岸工作基點設站測量,保證全站儀觀測時視場內只有一個棱鏡,避免棱鏡間的相互干擾。
2.3 極坐標測量結果分析
對測量結果進行極坐標平差處理,將左、右岸工作基點的X 坐標設置為0,經過平差所得各點X方向坐標即為該點在上下游方向水平位移,Mx 為測點X 方向坐標的中誤差,A5~A20的極坐標法測量X 方向坐標的中誤差均符合《DL/T 5178-2016 混凝土壩安全監測技術規范》中混凝土重力壩水平位移監測精度±1mm 的要求[3]。其在各點的極坐標法平差結果為:X(mm)13.34、13.09、16.98、15.83、18、10.36、13.81、20.02、13.7、13.18、2.77、-0.21、5.63、11.5、7.52、7.16;Mx(mm)0.69、0.77、0.6、0.57、0.49、0.86、0.73、0.22、0.30、0.98、1、0.91、0.83、0.79、0.76、0.84。
2.4 小角度測量結果分析
在左、右工作基點通過棱鏡罩分兩組對A5~A20各測點依次進行小角度測量,同樣采用全站儀自動測量水平角并現場記錄,按照小角度計算方法進行成果計算,結果如下:X(mm)13.27、13.01、16.49、15.37、17.67、10.04、13.89、20.20、13.94、12.85、2.52、-0.43、5.37、11.24、7.79、7.44。由于周期之間的沒有進行水平距離的測量,S1和S2作為常數考慮,則中誤差傳播關系表示為[4]mΔi=s/ρmβ。
在柘溪大壩16個視準線測點中離工作基點水平距離最遠的測點為A20至右岸工作基點348m,當采用測角精度為0.5”的全站儀時mΔi為0.84mm,小角度測量中16的測點最大中誤差符合《DL/T 5178-2016混凝土壩安全監測技術規范》中混凝土重力壩水平位移監測精度±1mm 的要求[3]。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
